


Olá novamente. Não faz muito tempo, forneci instruções para criar um gravador a laser a partir de um CD ou DVD-ROM. A primeira versão do gravador a laser estava completamente funcionando, mas não sem uma série de problemas. Primeiro, usei o driver do motor L9110S, perdendo a capacidade de usar o micro passo do motor e, como resultado, a resolução da gravação foi limitada. Houve também um problema com a incompatibilidade do software de gravação com os programas de gravação padrão. Na segunda versão, removi todas as falhas e o gravador começou a atender aos padrões e também a obedecer aos códigos G. A base permaneceu a mesma: a elétrica e o software mudaram. E apresento as instruções para reinstalar o anterior ou criar um novo gravador a laser.
Precisamos de:
- DVD-ROM ou CD-ROM
- Contraplacado com 10 mm de espessura (6 mm também pode ser usado)
- Parafusos de madeira 2,5 x 25 mm, 2,5 x 10 mm
- Arduino Uno (placas compatíveis podem ser usadas)
- Arduino CNC Shield v3
- Laser 1000mW 405nm Bluevioleta
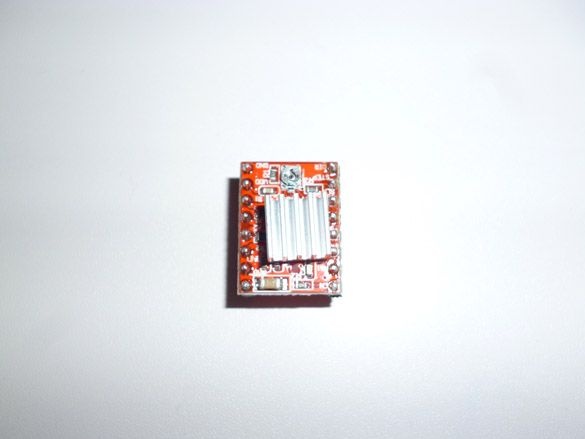
- Drivers de motor de passo A4988 com radiadores 2 peças.
- Fonte de alimentação de 5V (usarei uma fonte de alimentação antiga, mas funcional, para computador)
- Transistor TIP120 ou TIP122
- Resistor 2,2 kOhm, 0,25 W
- fios de conexão
- Conector 2,54 mm Dupont
- Eletrolobzik
- broca
- Brocas para madeira 2mm, 3mm, 4mm
- Parafuso 4 mm x 20 mm
- Porcas e arruelas 4 mm
- ferro de soldar
- Solda, resina
Etapa 1 Montamos o gabinete, a mecânica e preparamos a fonte de alimentação.
Aqui fazemos tudo exatamente como nos primeiro, segundo e terceiro passos da instrução "Gravador a laser do antigo DVD-Rom".
O quarto passo pode ser omitido, pois não precisamos de um joystick. Enviaremos todos os comandos através do terminal.
Etapa 2 Preparando os motores.
Sobre como remover motores de passo e carros que você leu no primeiro artigo. Então, lá soldamos os fios dos motores. Os conectores Dupon devem ser rebitados na outra extremidade dos fios:
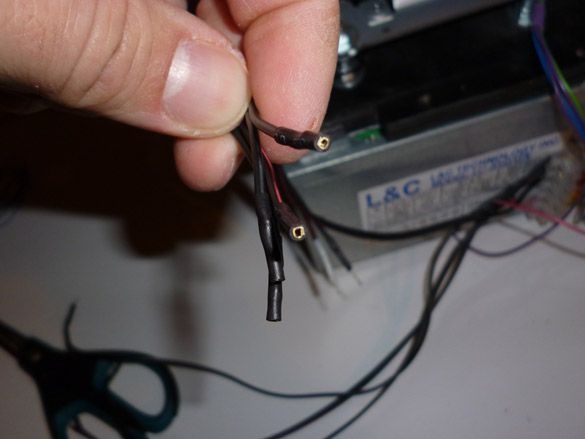
Se houver, é conveniente usar uma caixa de plástico para eles, em quatro fios. Caso contrário, você pode, como eu, colocar um psiquiatra em cada um dos fios.
Etapa 3 Coletamos o eletricista.
O cérebro do nosso gravador é o Arduino Uno.

Instale-o na parte traseira do gravador:

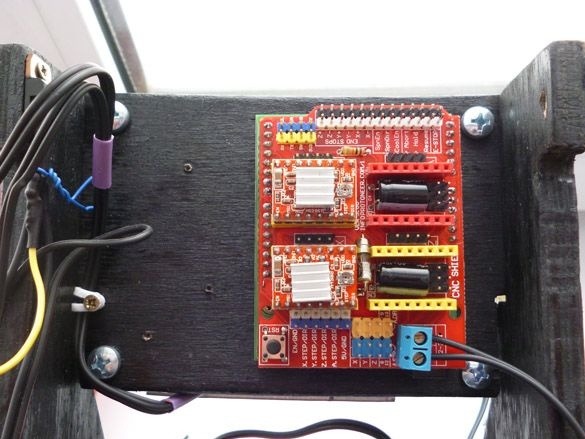
Uma das partes mais importantes é o Arduino CNC Shield.Usaremos a terceira versão deste cartão de expansão. Graças a ela, reduziremos significativamente o número de fios e simplificaremos a montagem do gravador:
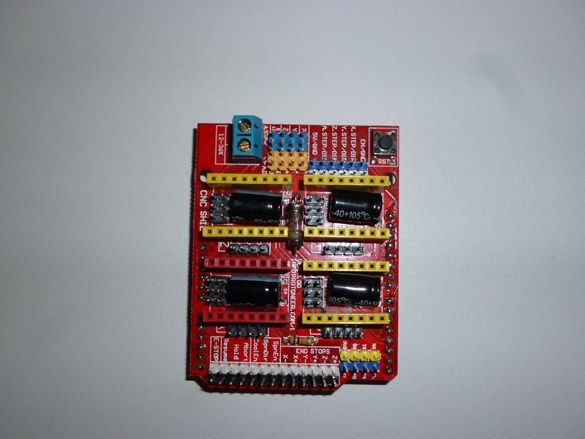
E por outro lado:

Colocamos o Arduino CNC Shied v3 no topo do Uno:

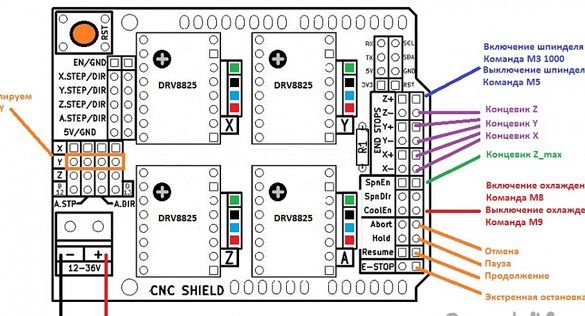
Os jumpers devem ser incluídos na placa de expansão. Antes de instalar o driver, você deve instalar os jumpers nos eixos X e Y. Ou seja, os jumpers MS0, MS1 e MS2 devem ser instalados nos eixos X e Y. Assim, definiremos o microstep como 1 \ 16. Se você ficar confuso com algumas instruções nesta placa de expansão:
Visualizar arquivo online:
Dravers ficam assim:
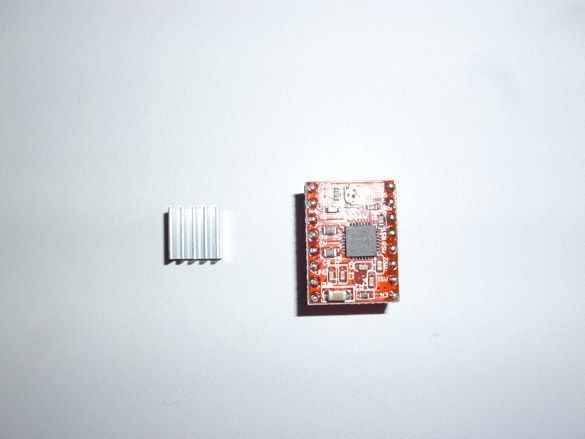
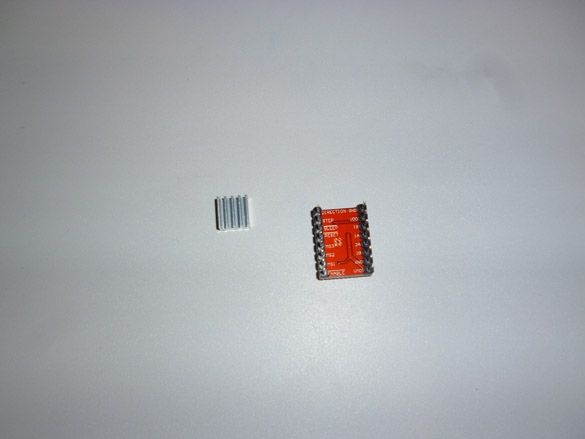
Primeiro, instale os radiadores no driver:
E então os colocamos no lugar dos eixos X e Y. Preste atenção à posição do motorista. Uma vez que pode ser facilmente instalado, não é verdade. A tecla EN no driver deve corresponder ao mesmo soquete na placa de expansão:
Eu recomendo comprar imediatamente um kit composto por drivers Arduino Uno, CNC Shield e A4988 com radiadores. Isso é mais barato e você não precisa esperar até o próximo componente aparecer.
O laser acabado que compramos com um driver e um radiador de resfriamento consome até 500 mA. Não pode ser conectado diretamente ao Arduino. Para resolver esse problema, use um transistor TIP120 ou TIP122. O resistor de 2,2 kOm está incluído no espaço entre a base do transistor e o pino 11 do Arduino. Na blindagem do CNC, este pino é designado como Z +. Este não é um erro de digitação. Aqui está a coisa. Olhando para o futuro, direi que trabalharemos com o firmware GBRL 1.1. O CNC Shield v3 foi desenvolvido para uma versão anterior deste firmware. Na versão GBRL 1.1, os desenvolvedores decidiram refazer a numeração da porta e, portanto, diferem do que está escrito na placa. Ou seja, eles trocaram Z + (D12) e Spn_EN (D11). O eixo está conectado ao D11, que é uma porta PWM, para controlar a velocidade do motor ou a potência do laser no nosso caso. Imagem com pinos modificados:
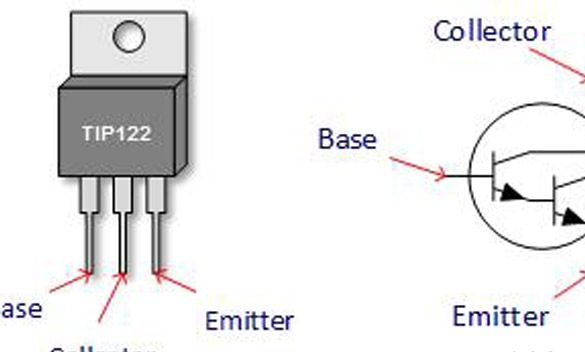
Base - R 2,2 kOm - pino 11 Arduino (Z + CNC Sheild)
Coletor - Laser GND (fio preto)
Emissor - GND (Fonte de Alimentação Comum)
+5 laser (fio vermelho) - +5 fonte de alimentação
O circuito não é complicado, então soldamos tudo em peso, isolando os fios e as pernas do transistor, transmitindo-o para trás, ao lado

Configurar o firmware GBRL não é uma tarefa fácil, especialmente para iniciantes. E com um laser, como fósforos, as crianças não são brinquedos. Mesmo com um feixe refletido, o olho pode ser seriamente danificado. Portanto, recomendo trabalhar com o laser apenas em óculos de proteção e, para testes e configurações, conecte um LED comum em vez do laser. A cor não importa. Tendo incluído um resistor adequado na folga do fio positivo do diodo, conectamos um LED em vez de um laser:

Óculos de segurança e diodo de teste minimizarão problemas acidentais com o gravador.

Etapa 4 Configurando o limite de corrente do motor.
É necessário definir a força da corrente para reduzir o ruído ao operar em altas correntes, livrar-se do cisalhamento em baixas correntes e também para reduzir o aquecimento do motor de passo.
Conectamos o fio negativo do multímetro ao contato GND e pressionamos o fio positivo ao corpo do resistor de sintonia no driver. Torça o resistor de sintonia com uma pequena chave de fenda, medindo a tensão Vref. Assim, definimos a corrente correta para o nosso driver de motor de passo.
A fórmula Vref para o A4988 depende do valor dos resistores instalados neles. Geralmente é um R100.
Vref = Imax * 8 * (RS)
Imax - corrente do motor de passo
RS é a resistência do resistor.
No nosso caso:
RS = 0,100.
A força atual recomendada dos motores de passo é de 0,36A. Mas eu prefiro aumentar um pouco.
Imax = 0,4
Vref = 0,5 * 8 * 0,100 = 0,32 V.
Etapa 5 Preencha GBRL 1.1.
É mais conveniente escrever um arquivo de firmware HEX pronto para o Arduino Uno.
Para fazer isso, você precisa do programa XLoader:
Execute o programa. Selecione o arquivo HEX baixado anteriormente. Abaixo, selecionamos nosso controlador da lista, ou seja, Uno (ATmega328). Em seguida, selecione a porta com a qual o Arduino está conectado. Definimos a velocidade para 115200 e clique em Upload. Após aguardar a conclusão do preenchimento, você pode prosseguir para a verificação e configuração.
Etapa 6 Configurações.
Os parâmetros incluídos no firmware diferem dos parâmetros da nossa máquina. A janela do terminal é usada para configuração. Você pode usar o que quiser. Eu prefiro o IDE do Arduino. Faça o download no site oficial do projeto:
https://www.arduino.cc/en/Main/Software
Nenhuma biblioteca é necessária, precisamos apenas de um terminal do IDE do Arduino. Na guia Ferramentas, selecione nossa placa - Arduino Uno e, em seguida, selecione a porta de comunicação à qual está conectada. Depois disso, inicie o terminal localizado na guia Ferramentas - Monitor de porta. Na janela do terminal, defina o parâmetro CR (retorno de carro) e uma velocidade de 115200 baud. A seguinte linha deve vir:
Grbl 1.1f ['$' para ajuda] Se você a viu, o firmware tornou-se bem-sucedido e você pode prosseguir com a instalação. Portanto, usamos motores de passo de unidades de DVD ou CD. Eles são referidos como PL15S020 ou compatíveis com isso:
Visualizar arquivo online:
Para visualizar as configurações atuais do firmware, digite:
$$Este mecanismo tem 20 etapas por rotação. O passo do parafuso é a distância que o carro percorre em uma volta, no nosso caso, 3 mm. Calculamos o número de etapas por 1 mm: 20/3 = 6,6666666666667 etapas por 1 mm. Nos drivers a4988, instalamos o microstep 16. Portanto, 6.666666666666767 * 16 = 106.67 etapas por 1 mm. Nós escrevemos esses dados no firmware. Para fazer isso, na janela do terminal, digite:
$100=106,67
$101=106,67
$102=106,67O último parâmetro é opcional, é para o eixo Z, mas é mais compreensível do que visualizar os parâmetros. Em seguida, ative o modo laser com o comando:
$32=1Defina a potência máxima do laser como 255:
$30=255Para testar o laser (é melhor conectar primeiro o LED), digite o comando:
M3 S255Desligue o laser com o comando:
M5Em seguida, definimos o tamanho máximo de gravação. Para o nosso gravador, isso é 38 x 38 mm:
$130=38.000
$131=38.000
$132=38.000Novamente, o último parâmetro é opcional; é para o eixo Z.
Espalhei os parâmetros de trabalho do nosso gravador para que você possa comparar:
$0=10
$1=25
$2=0
$3=0
$4=0
$5=0
$6=0
$10=1
$11=0.010
$12=0.002
$13=0
$20=0
$21=0
$22=0
$23=0
$24=25.000
$25=500.000
$26=250
$27=1.000
$30=255
$31=0
$32=1
$100=106.667
$101=106.667
$102=106.667
$110=500.000
$111=500.000
$112=500.000
$120=10.000
$121=10.000
$122=10.000
$130=38.000
$131=38.000
$132=38.000Etapa 7 Prepare a imagem.
Para gravar algo, você precisa preparar a imagem escolhida, ou seja, traduzi-la em um código G. Para fazer isso, usaremos o programa CHPU:
Faça o download e retire o programa. Clique em "Importar imagem" e selecione sua imagem. Na seção "Alterar resolução", defina "Largura" e "Altura" para um máximo de 38 mm. A "densidade" pode ser tentada de maneira diferente. Na minha opinião, o ideal é 6:
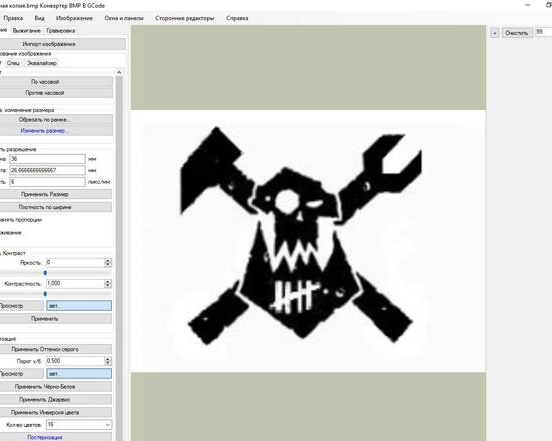
Vá para a guia "Gravar". Selecione "LIGADO no preto". Na seção "Comandos preliminares", devem ser as seguintes entradas, sem explicação entre colchetes:
%
G71
S255 (potência máxima do laser)
G0 F200 (velocidade de marcha lenta)
G1 F100 (velocidade de gravação)
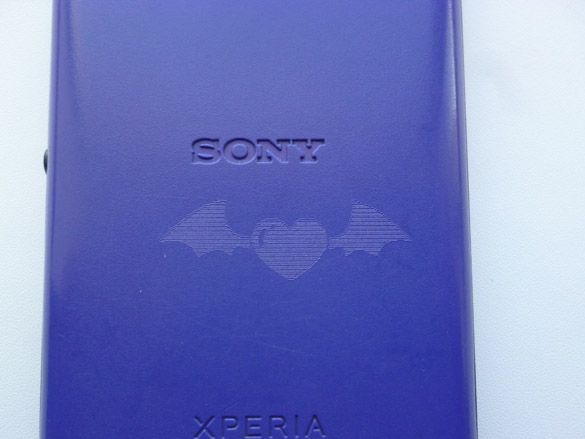
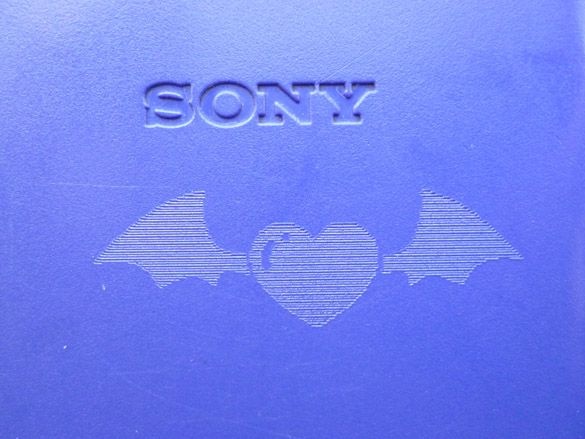
(Velocidade de queima F)Você pode tentar diferentes velocidades de gravação. Para o plástico, basta o F100; para a madeira, pode ser necessário menos. Clique em "Salvar código G" e especifique o local de armazenamento. Importante! A resolução deve escolher ".nc".
Etapa 8 Queima.
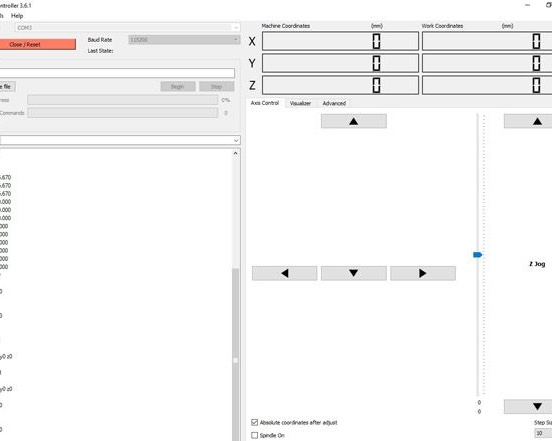
Para gravar e controlar o gravador, usaremos o programa GrblController:
Baixe e instale. Clique em "Abrir". Depois de verificar se tudo funciona, usando as setas e o comando de ativação do laser, selecione o arquivo que você salvou e envie-o para gravação pressionando “Iniciar”:
Gravador de vídeo:
