Hoje eu quero compartilhar minha próxima caseiro. É baseado em Lego e Arduino. Para controle, usaremos um controle remoto com um transmissor de 433 MHz. Desta vez eu queria fazer uma corrida um carro. Prossiga:
- Lego Technic 42022
- Arduino Nano
- DRV 8833
- Servo SG-90
- módulo de comunicação por rádio 433 MHz
- Redutor de motor 200 rpm, com diâmetro do eixo de 3 mm
- 2 LEDs
- 2 resistores de 150 ohms
- Capacitor 10v 1000uF
- 2 pentes de uma linha PLS-40
- 2 conectores PBS-20
- Indutor 68mkGn
- 6 baterias NI-Mn 1.2v 1000mA
- Conector pai-mãe dois pinos para fio
- Homutik
- Fios de cores diferentes
- solda
- Rosin
- ferro de soldar
- Parafusos 3x40 e porcas e arruelas para eles
- Parafusos 3x20
Etapa 1 monte o estojo.
É necessário montar nossa máquina de acordo com as instruções Lego 42022, a segunda opção com algum refinamento. Realizamos todas as ações da página 3 a 6. Não precisamos de um mecanismo de engrenagem. O motor Lego também não precisa ser montado. No entanto, você precisará de montagens de mecanismo coletadas nas páginas 14-19, exceto engrenagens e eixos. Em seguida, coletamos tudo das páginas 20 a 74, exceto a alavanca na página 25.
Etapa 2 mecanizar o corpo.
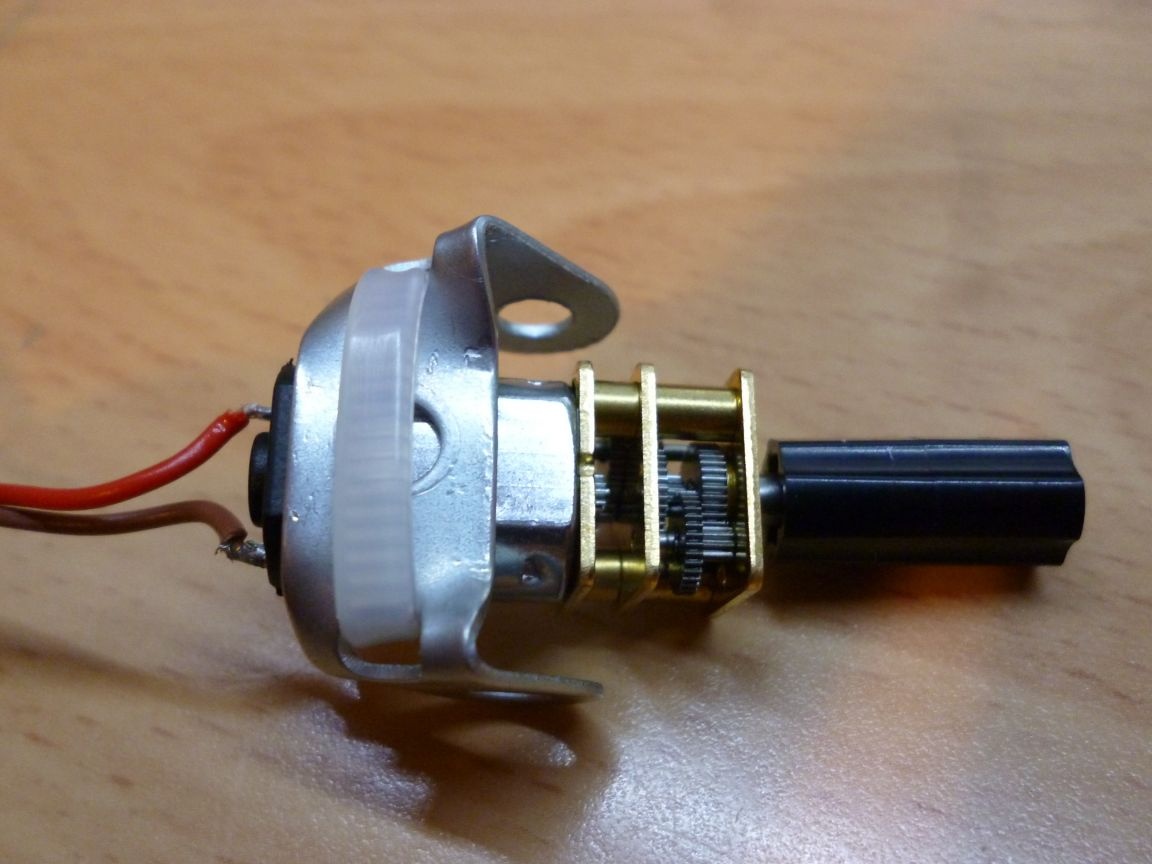
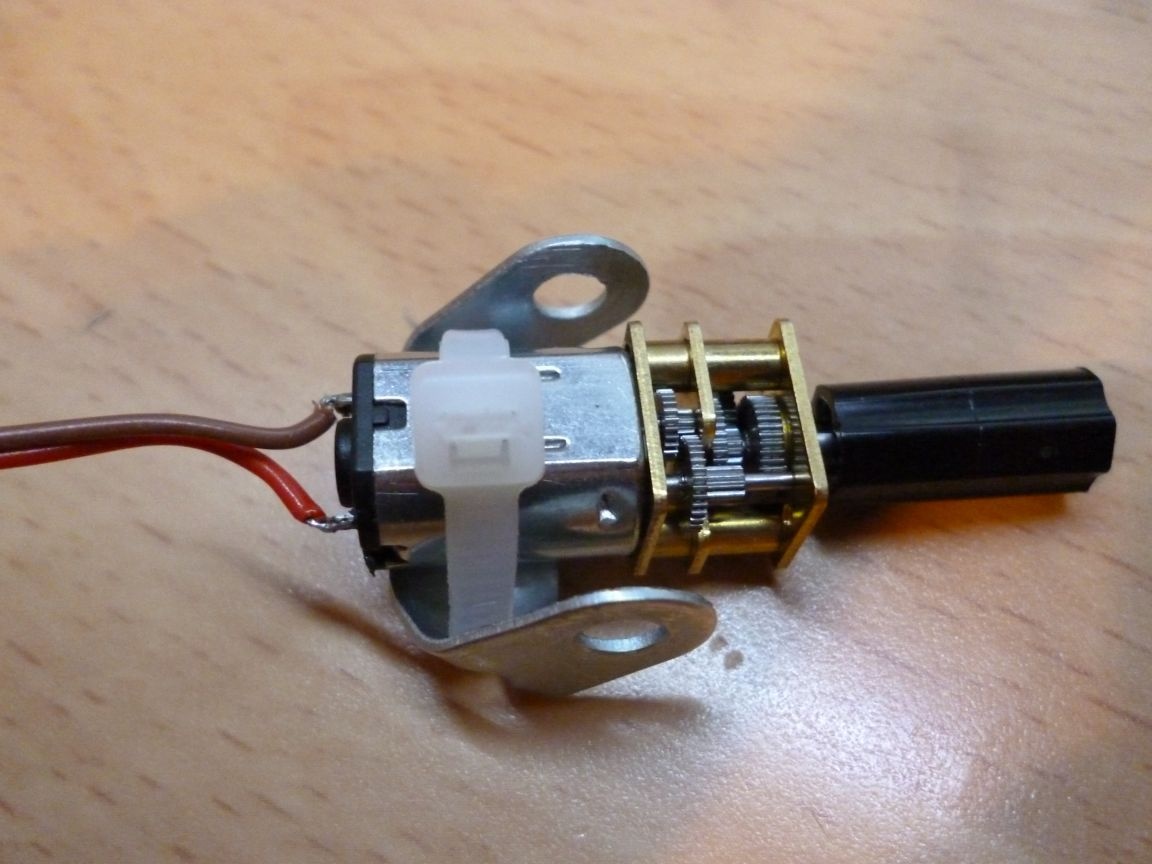
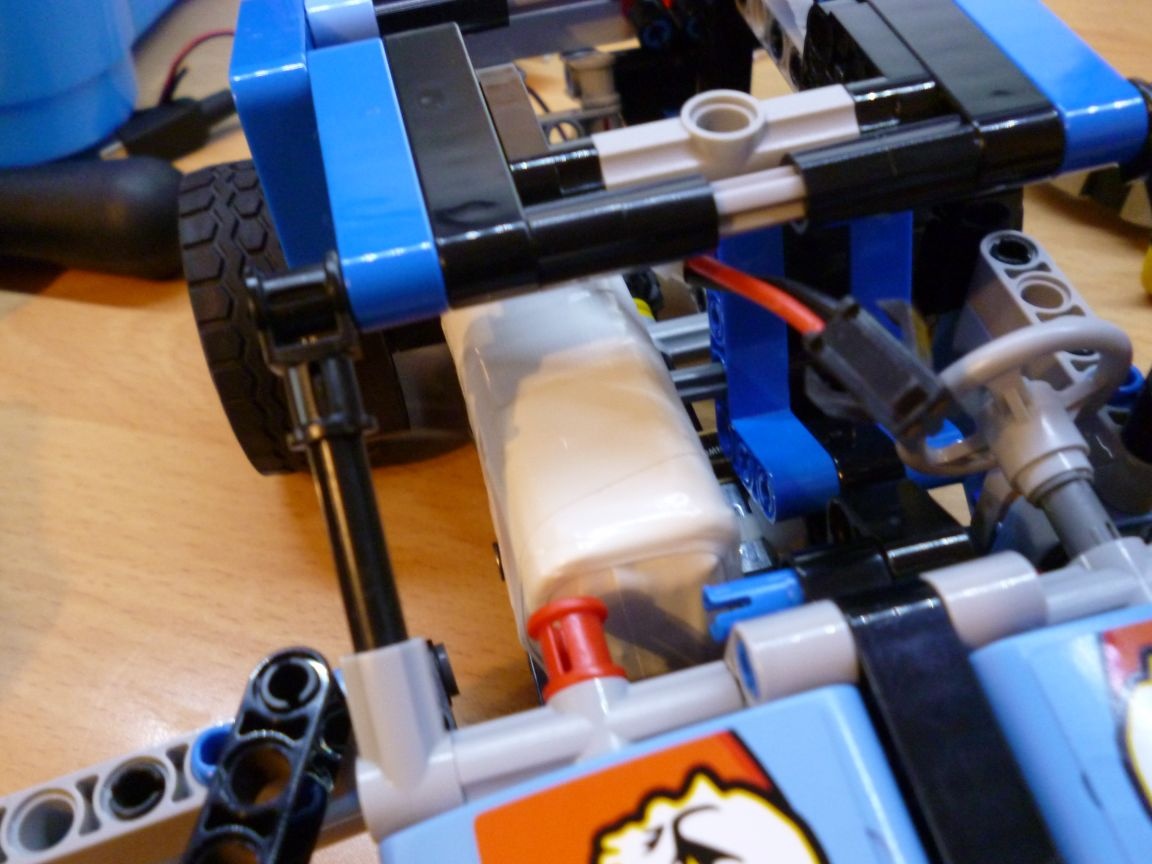
Ponha em movimento nossa o modelo haverá um motor de engrenagem com uma velocidade de 200 rpm. Pode ser usado com uma relação de transmissão diferente. Mas, na minha opinião, esta é a melhor opção. A 100 rpm - muito lentamente, 300 rpm - não há potência suficiente e o motor está muito quente. No eixo do moto-redutor, coloque a luva de conexão “Legovskaya” e prenda-a contra torcer a partida com um caimento. Para fixar nosso motor no modelo, é necessário dobrar a peça do construtor de metal com a letra “P” e conectar o motor de engrenagens à placa com uma pinça. O resultado deve ser o seguinte:
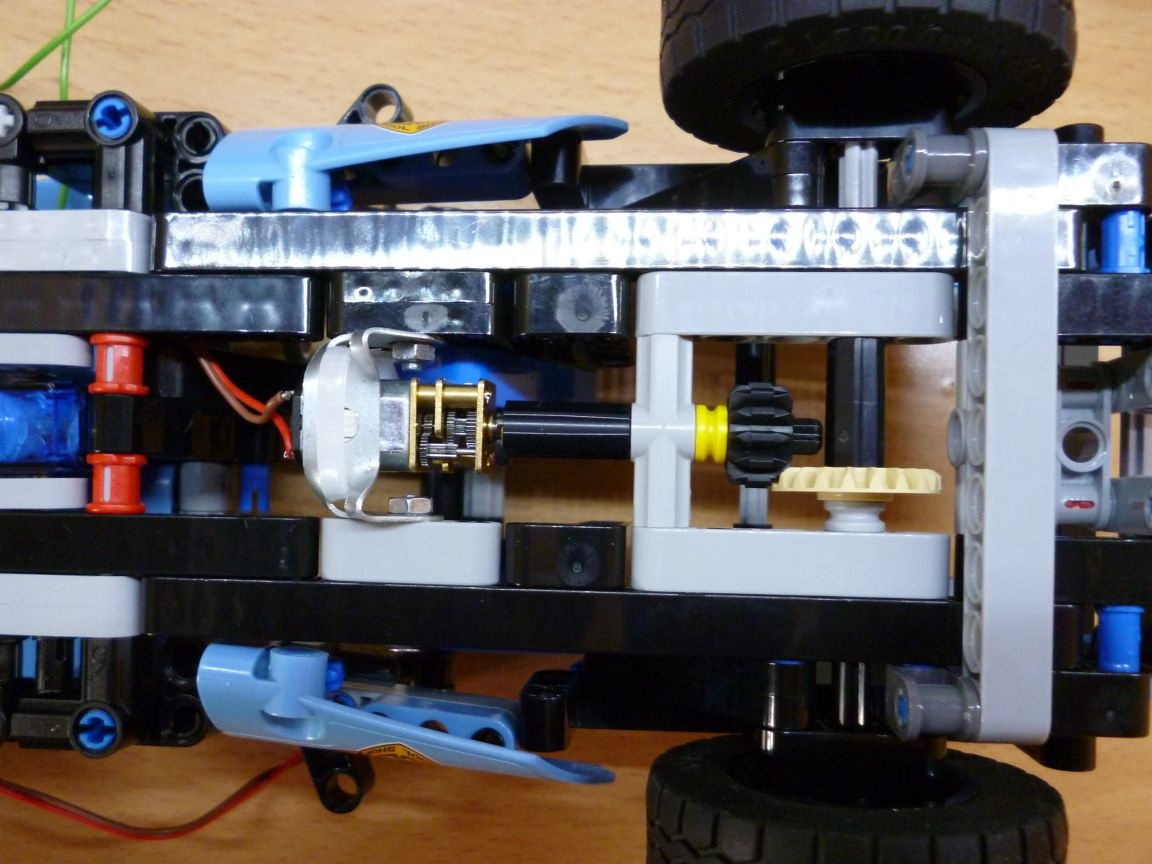
Com a ajuda de parafusos de 3x20, prendemos nosso motor ao modelo. Não aperte demais! Caso contrário, você pode danificar as peças do construtor Lego. No modelo, fica assim:
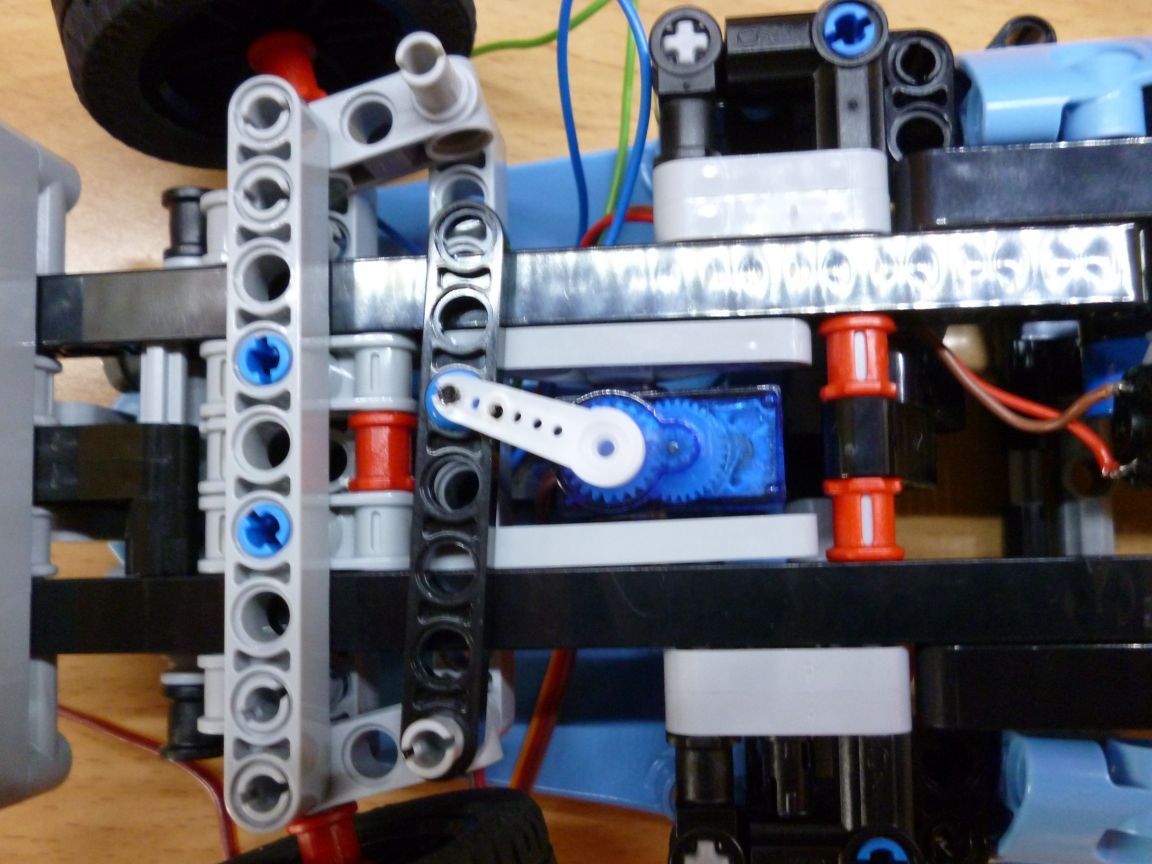
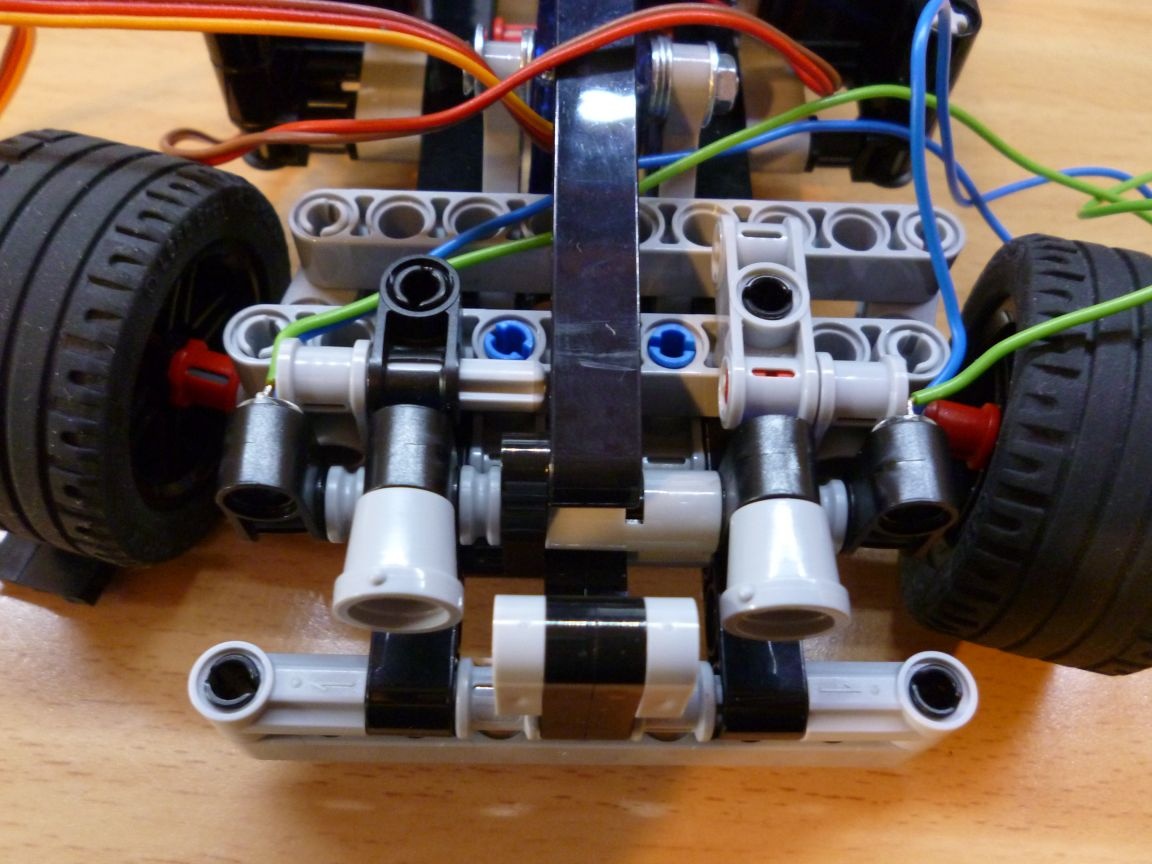
Para fazer a curva, pegue um servo SG-90 ligeiramente modificado. O estojo deve ser perfurado com cuidado para não tocar nas partes internas, no orifício de passagem com diâmetro de 3,2 mm ou simplesmente cortar com uma faca de papelaria.

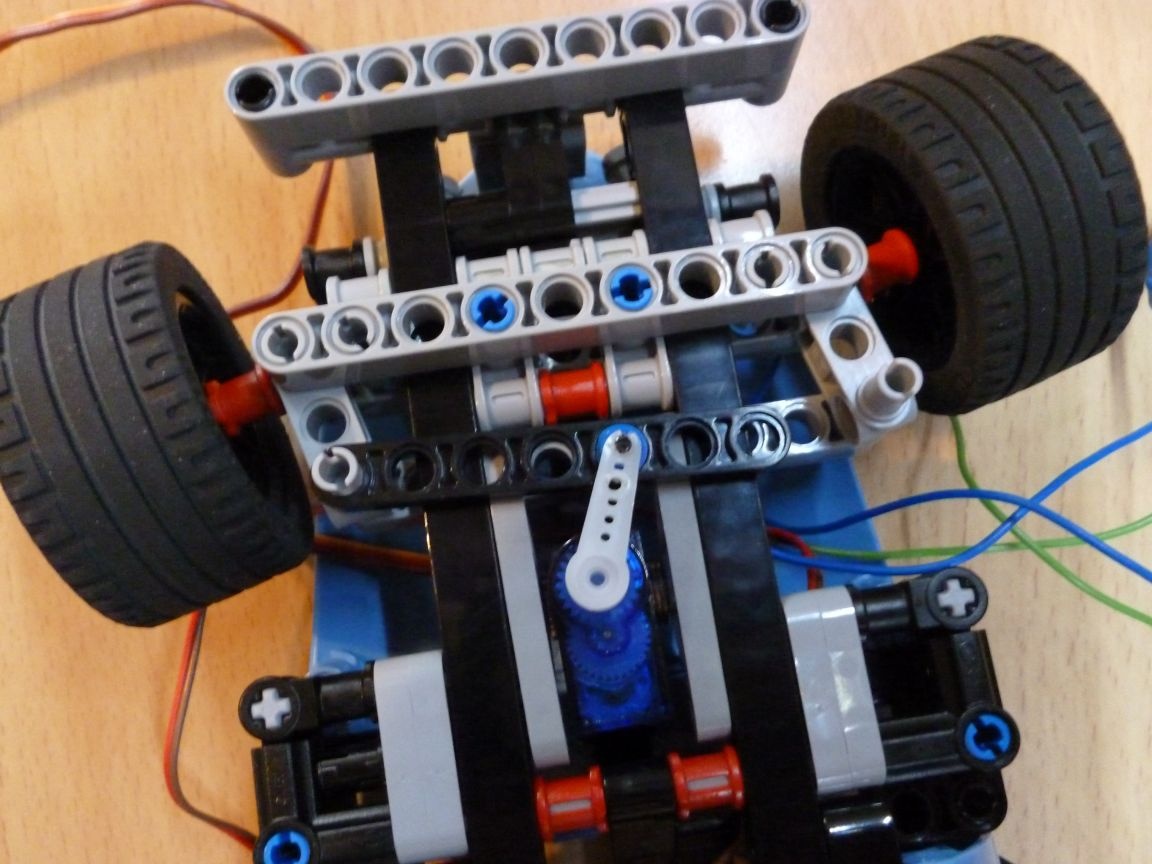
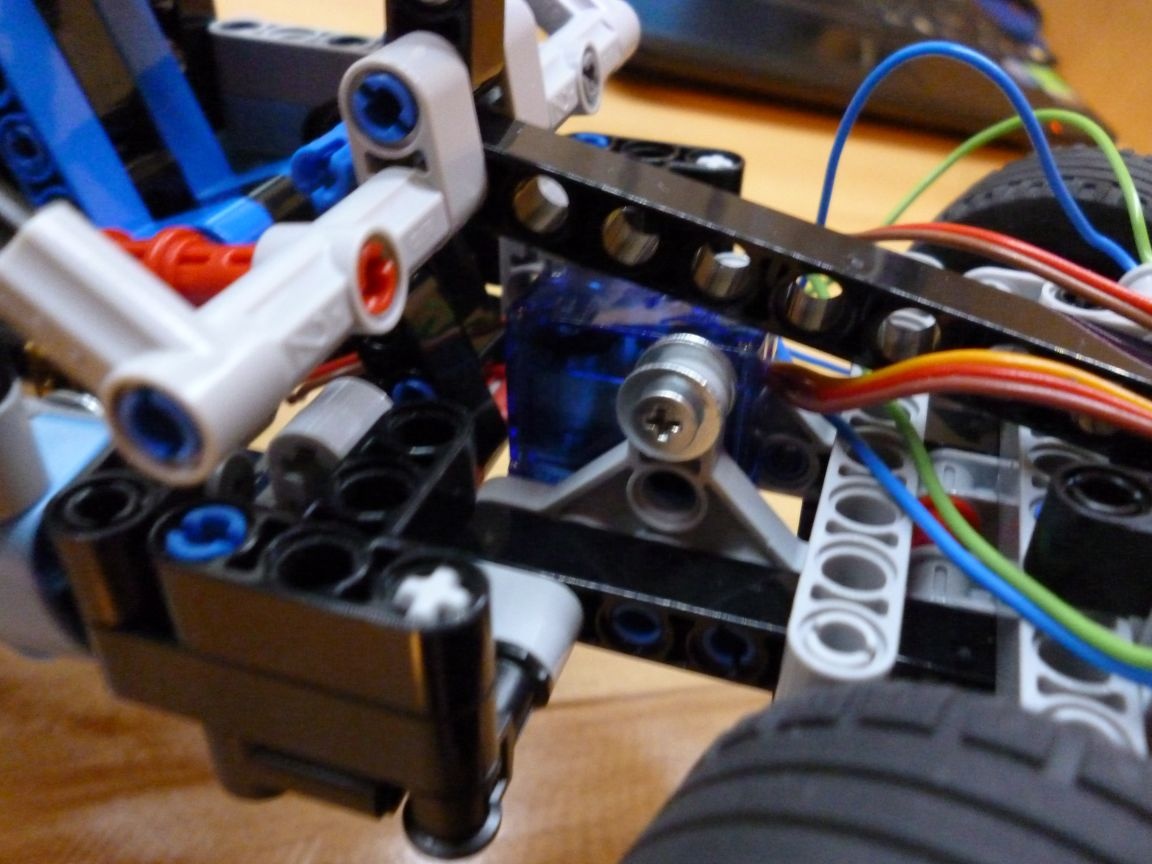
Nós inserimos um parafuso no buraco feito, e nas bordas colocamos placas triangulares e as fixamos com porcas. Colocamos a alavanca no eixo servo e prendemos a peça na alavanca Lego. Em uma máquina de escrever, fica assim:
O passo 3 é um eletricista.
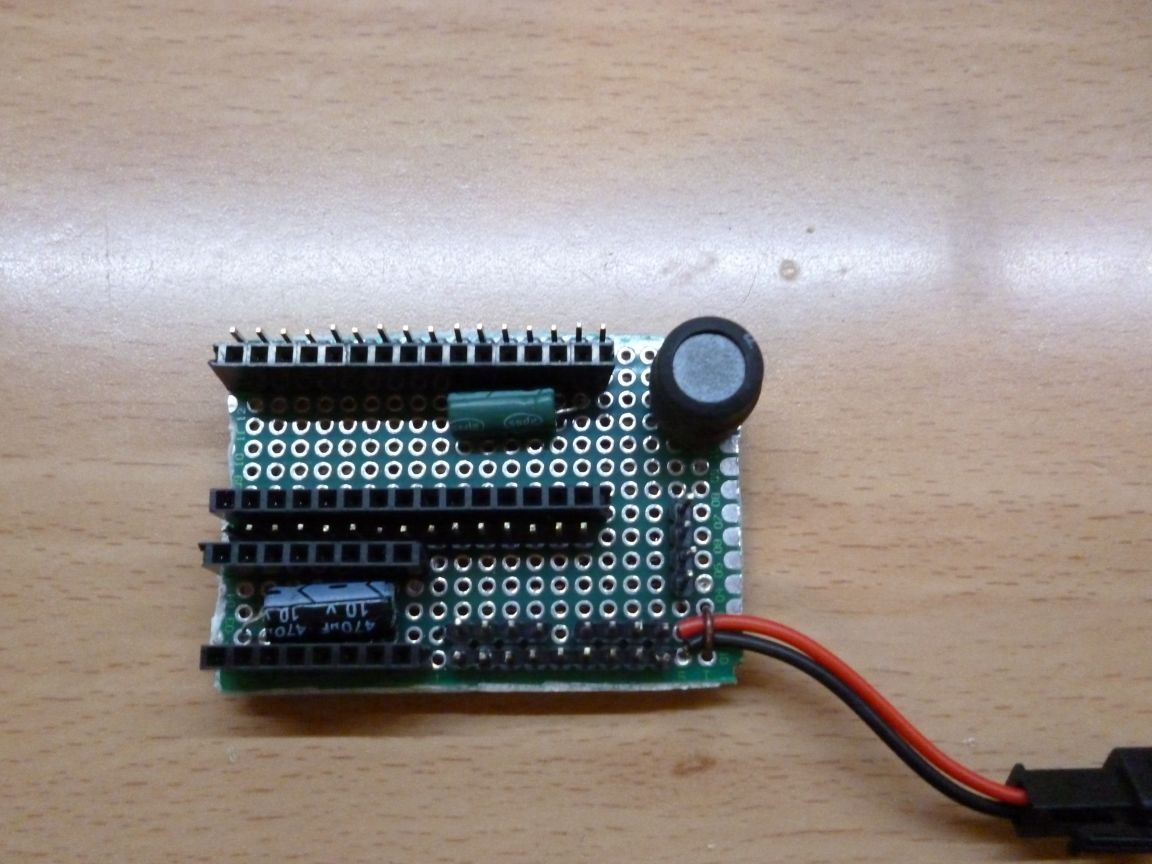
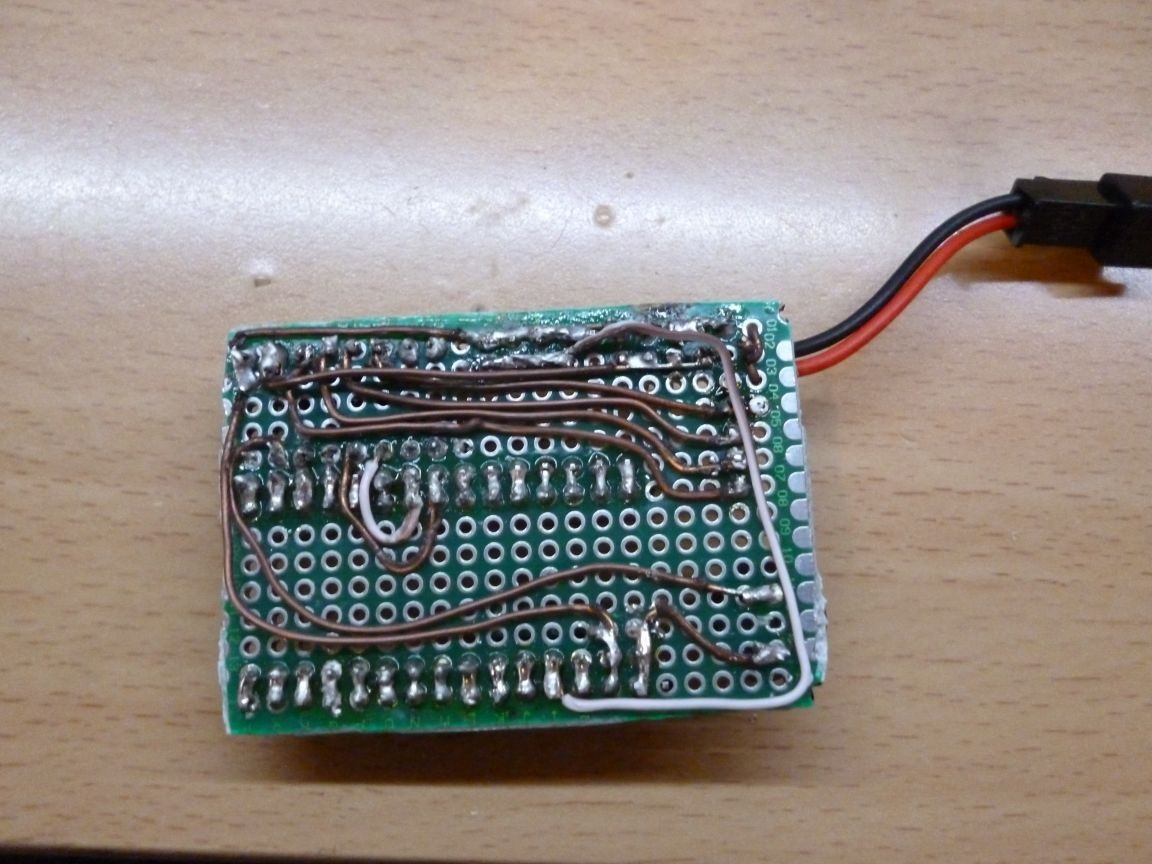
Ferro de solda na mão e pronto. Todos os componentes elétricos podem ser montados simplesmente conectando os fios de montagem. Mas isso é inconveniente, pois requer muito espaço. Além disso, existe uma alta probabilidade de contato de baixa qualidade. Portanto, é melhor soldar tudo na placa de circuito de acordo com o seguinte esquema:
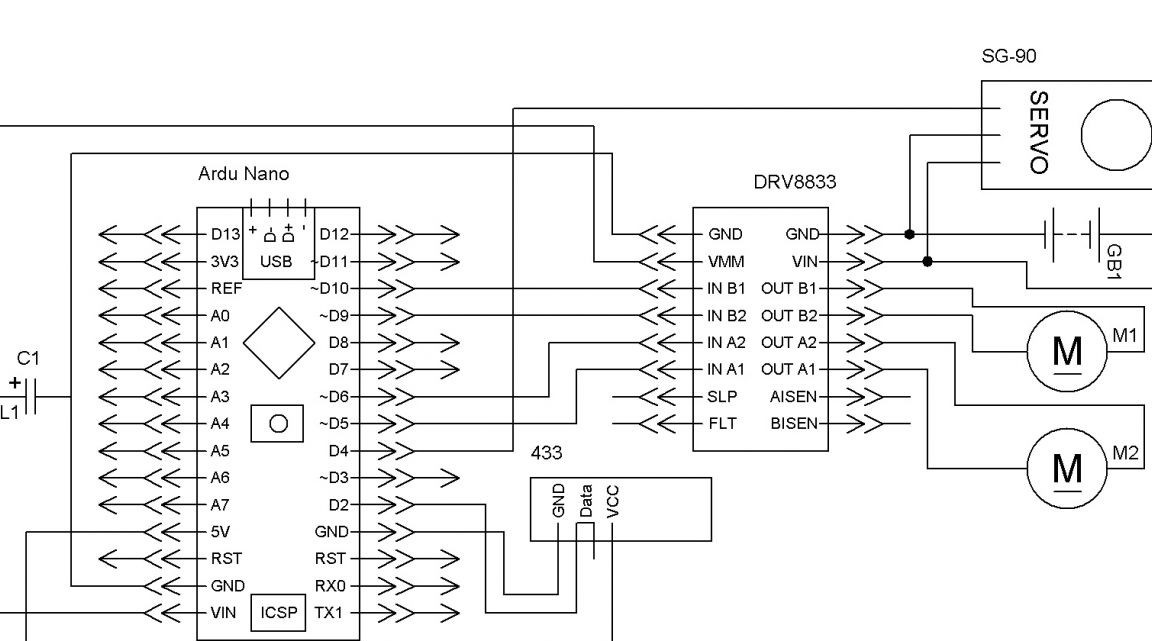
Vou trazer um pouco de clareza: você pode usar qualquer capacitor de baixa potência, também pode encontrar um indutor de qualquer tipo, isso é necessário para estabilizar a tensão do microcontrolador. A antena deve ser soldada ao receptor. Eu tenho o seguinte:
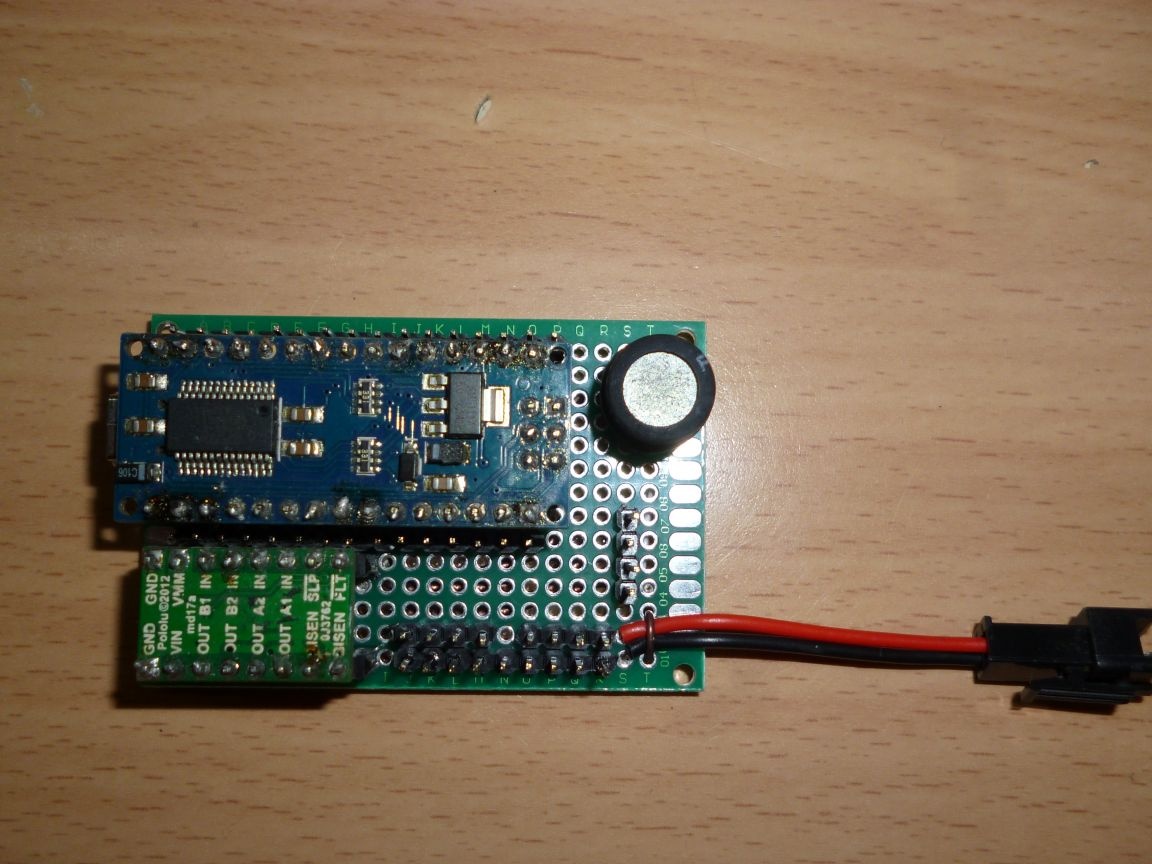
Colocamos Arduino Nano e DRV 8833 em seus lugares:
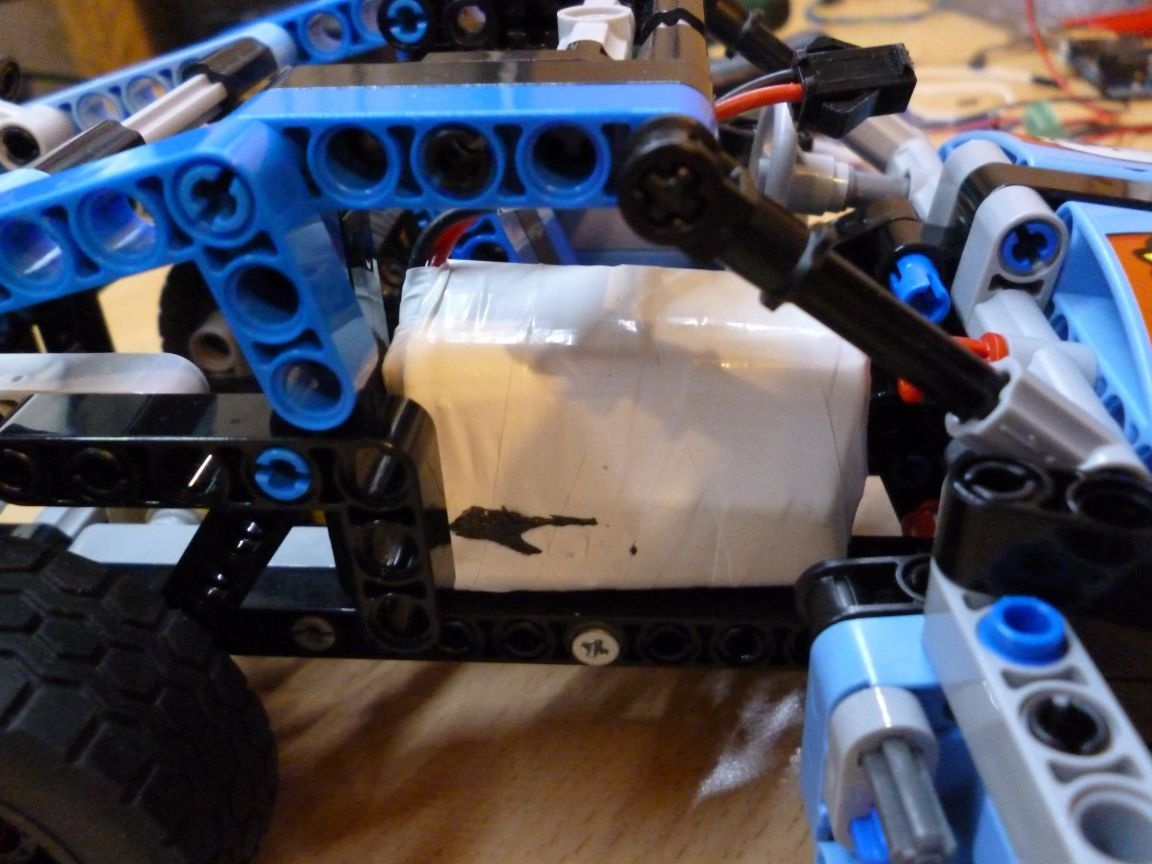
Para energia, usaremos 6 baterias Ni-Mn 1.2v 1000mA, soldadas em série e enroladas com fita isolante. Cole-os em um assento de passageiro de fita adesiva dupla face.

Conectamos tudo de acordo com o esquema e instalamos na parte traseira da máquina. Você também pode adicionar alguns LEDs. Coloque-os nos faróis e conecte ao pino 14 (A2).
Etapa 4 firmware.
Para escrever o firmware, usei o Arduino IDE. A versão atual no momento da redação deste documento é 1.8.1. É conveniente implementar o protocolo de comunicação usando o módulo 433 MHz usando a biblioteca rc-switch-2.52. Você precisa fazer o download e adicioná-lo à pasta “bibliotecas” do IDE do Arduino.
Conectamos o Arduino e o atualizamos com o seguinte firmware:
Para testar o desempenho do nosso modelo, precisamos de uma segunda placa Arduino. É necessário conectar um transmissor de rádio de 433 MHz à segunda placa. O transmissor está conectado da seguinte maneira:
VCC (transmissor) a 5+ (Arduino),
GND para GND,
DADOS para D10.
Escreva o esboço SendDemo modificado lá. Está nos exemplos da biblioteca que instalamos e serve para enviar comandos. Antes de exibir o esboço, é necessário alterá-lo levemente, ou seja, alterar os comandos transmitidos. Dependendo do que você precisa verificar, escreva os seguintes comandos na linha de envio:
“1” - movimento para frente (escreva um comando sem aspas!)
"2" - movimento para trás
"15" - ponto final
"3" - gire o volante para a esquerda
"4" - gire o volante para a direita
"5" - coloque o volante no meio
"10" - acenda os faróis
"11" - desligue os faróis
Fazer um controle remoto com um transmissor de rádio de 433 MHz é um tópico para um artigo separado. Definitivamente vou escrever as instruções para a fabricação desse controle remoto.
Quero dizer que esta opção é adequada para quase todos os modelos de carros Lego. Basta conectar todos os mecânicos e encontrar um lugar para o conselho. E se você incluir fantasia, poderá mecanizar qualquer modelo.