

Vídeo de trabalho do robô
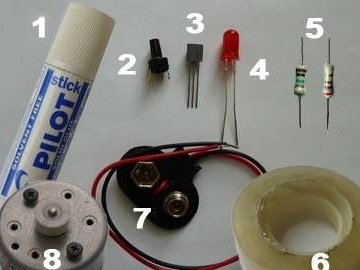
Materiais e ferramentas para criar um robô:
- bastão de cola seca;
- fita transparente;
- botão não fixo de dois pinos;
- um LED intermitente do tipo ARL-513URC-B;
- transistor tipo KP505A;
- dois resistores com um valor nominal de 1M e 270 Ohms;
- conector de encaixe para conectar a uma bateria do tipo "coroa";
- modelo de motor RF-300CA-D / C 3V ou similar.

Funcionalidade e características do robô:
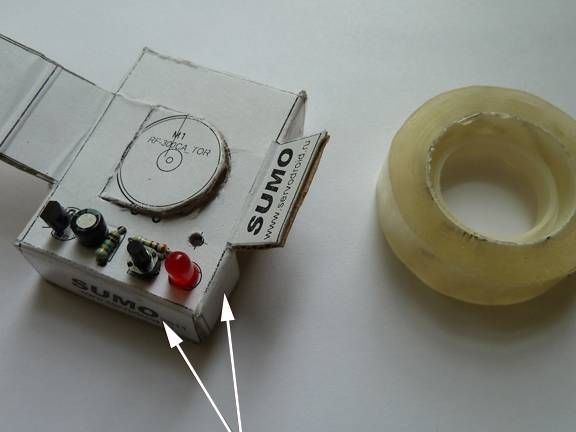
Na foto você pode ver já montado o robô. Para mover o dispositivo, apenas um motor é usado, ele é instalado verticalmente, mas em um determinado ângulo. Ao se mover em um segmento curto, o robô se move em uma linha reta e faz um arco em uma seção mais longa.
Um botão é usado para ligar o robô; quando pressionado, o robô liga por 20 segundos. Depois disso, um desligamento automático ocorre e o robô fica no modo de espera até a próxima ativação.
Outra característica do robô é que ele para automaticamente na borda do anel. O cumprimento dessa condição é possível se o peso do oponente não for menor que o peso do robô e a espessura do anel não for menor que 3 mm.
Aqui, uma bateria de 9 Volts é usada como fonte de energia, é montada em cima do robô. Graças ao peso adicional, o robô acumula a energia cinética necessária para as ações necessárias.
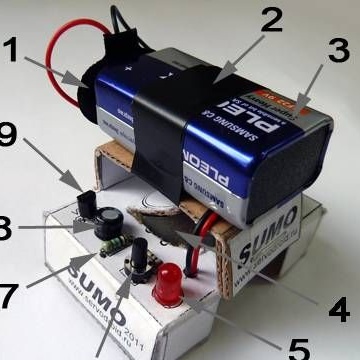
Na figura, os componentes do robô estão marcados com números:
1. Clipe para conectar a bateria.
2. Trava da bateria.
3. Fonte de alimentação (bateria de 9 V).
4. O motor.
5. LED piscando (indica que a energia está conectada).
6. Botão para ligar o robô.
7. Resistor, graças a ele, você pode definir a hora do robô.
8. Capacitor, ele também é responsável pelo tempo do robô.
9. Transistor tipo KP505A, é um driver de motor.
Processo de montagem do robô:
Primeiro passo Nós fazemos o caso
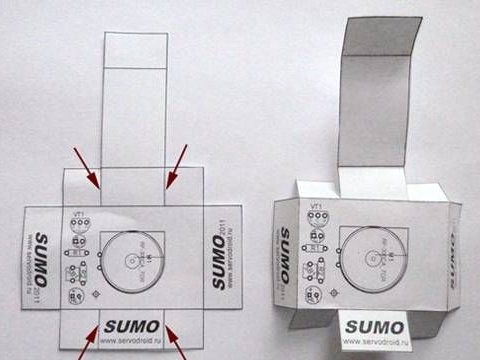
Para fazer o caso, o autor usa um papelão ondulado, você precisa aplicar um contorno a ele de acordo com o modelo. O modelo pode ser impresso em uma impressora, anexado ao artigo. Além disso, depois de fazer as dobras necessárias, o padrão pode ser cortado ao longo de linhas grossas. Para instalar o mecanismo, você precisa cortar um semicírculo no papelão e dobrá-lo um pouco, como indicado na foto.


Etapa dois Instalação de elementos de rádio
No próximo estágio, você precisa instalar todos os elementos de rádio necessários. Para fazer isso, você precisa dar um furador e fazer furos no papelão, eles precisam ser feitos em marcas redondas. Para consertar os componentes, após a instalação, suas conclusões precisam ser levemente dobradas. Você também pode ver a marca na forma de uma mira no papelão, aqui você precisa fazer um grande buraco, um fio elétrico passará por ele.
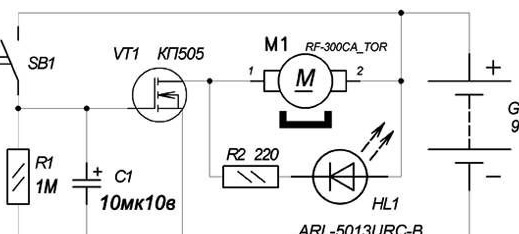
Depois disso, você pode pegar um ferro de soldar e começar a conectar os contatos dos elementos de rádio de acordo com o esquema.





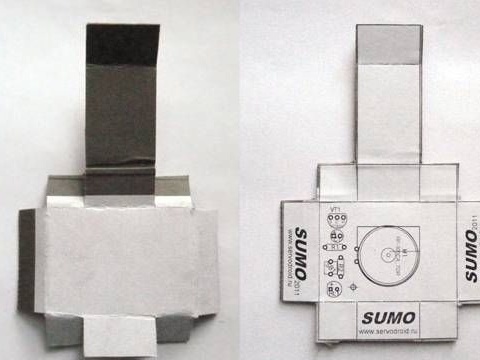
Etapa três Fixamos as superfícies laterais inferiores
Nesta fase, as superfícies laterais inferiores podem ser unidas. Para fazer isso, você precisa dobrar os planos inferiores e fixá-los com fita transparente. Também na imagem você pode ver os elementos da caixa inclinados para cima, eles são necessários para consertar a bateria.


Etapa quatro Conectar periféricos
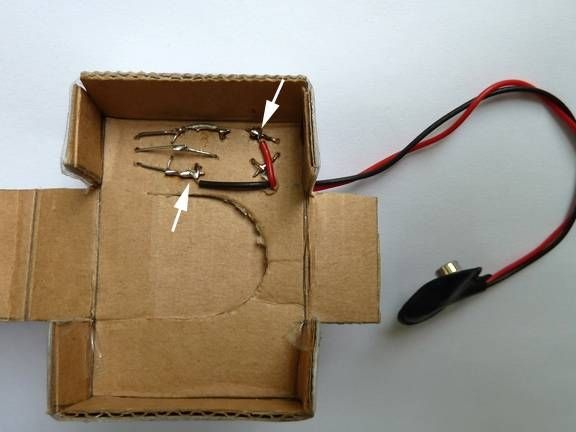
Para conectar a energia à bateria, você precisa usar um conector de clipe. O fio precisa passar pelo orifício, o vermelho é soldado ao contato positivo do LED e o preto ao menos do capacitor C1.
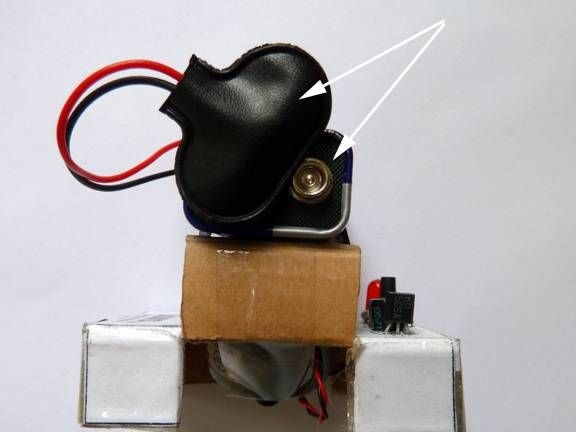
Então você precisa conectar as superfícies do lado esquerdo e direito, como resultado, a letra "P" deve ser obtida. Para uma fixação confiável dos elementos, é usado um suporte do grampeador. Onde instalar os suportes é indicado por uma seta branca. Os grampos podem ser presos com um alicate.


Quinto passo Instale e conecte o mecanismo
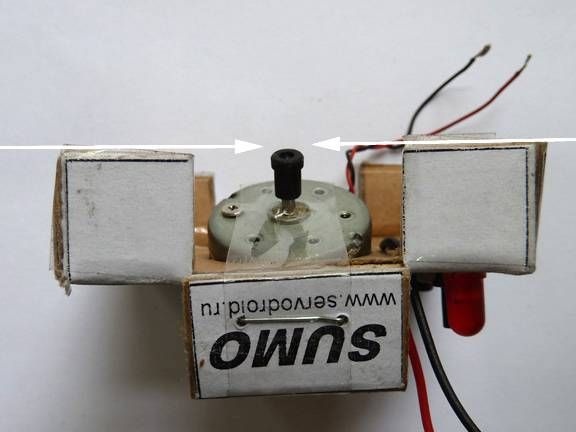
Para que o robô se mova reto, seu eixo deve estar em um determinado ângulo em relação à superfície. Em outras palavras, o robô ficará nas partes laterais e seu eixo estará em contato apenas com a superfície. Para que o eixo do robô tenha uma boa aderência, é necessário colocar um elástico nele, ele pode ser um retentor de cambraia ou borracha de uma caneta de hélio.
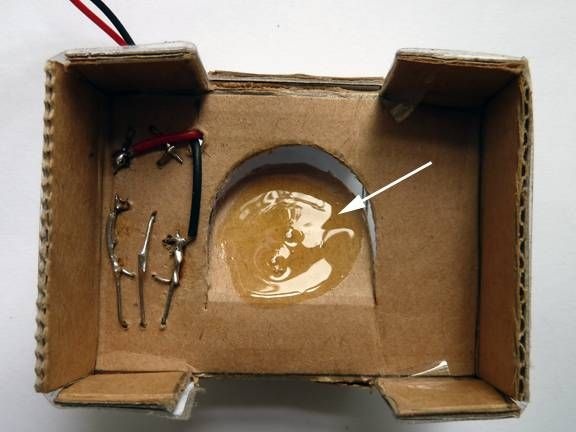
O motor é montado na cola, o local da lubrificação é marcado com uma seta branca. Depois de aplicar a cola, você precisa esperar um pouco para que ela se torne viscosa; caso contrário, a cola líquida pode entrar no motor e estragá-lo.
Para fixação adicional, o motor é enrolado com fita adesiva.


Quanto ao ângulo do robô, tudo isso é claramente visível nas fotos. Após a instalação, o motor precisa estar conectado. Um pino está conectado ao sinal de menos e o outro ao dreno do transistor VT1.


Etapa seis A etapa final da montagem
A bateria é montada em uma estrutura em forma de U, a bateria é fixada usando fita isolante. A estrutura é pensada de tal maneira que, além do suporte, também é um amortecedor para a bateria. Se o robô precisar ser completamente desconectado da fonte de alimentação, você poderá desconectar um fio da bateria.
Bem, em conclusão, para a competição você precisará de um anel, ele é feito de duas camadas, com uma espessura de pelo menos 3 mm. Se essa condição não for atendida, o robô não poderá parar na borda do anel. O diâmetro do anel deve ser 250 mm. A camada inferior consiste em um papelão ondulado fino e a camada superior de papelão fino preto. Ambas as camadas precisam ser coladas. A montagem acabou, você pode começar a competição. O vencedor é o robô que permanece no ringue.