

O artigo irá considerar um exemplo de criação de um robô lendário chamado "Canbot". A maior parte dos detalhes do robô é impressa em uma impressora 3D. O robô é controlado remotamente.
Materiais e ferramentas para caseiro:
- Um microcontrolador Atmel Attiny85;
- dois microsserviços HXT900 ou seus análogos;
- uma bateria de 3.7V LiPo;
- um receptor infravermelho a 38kHz;
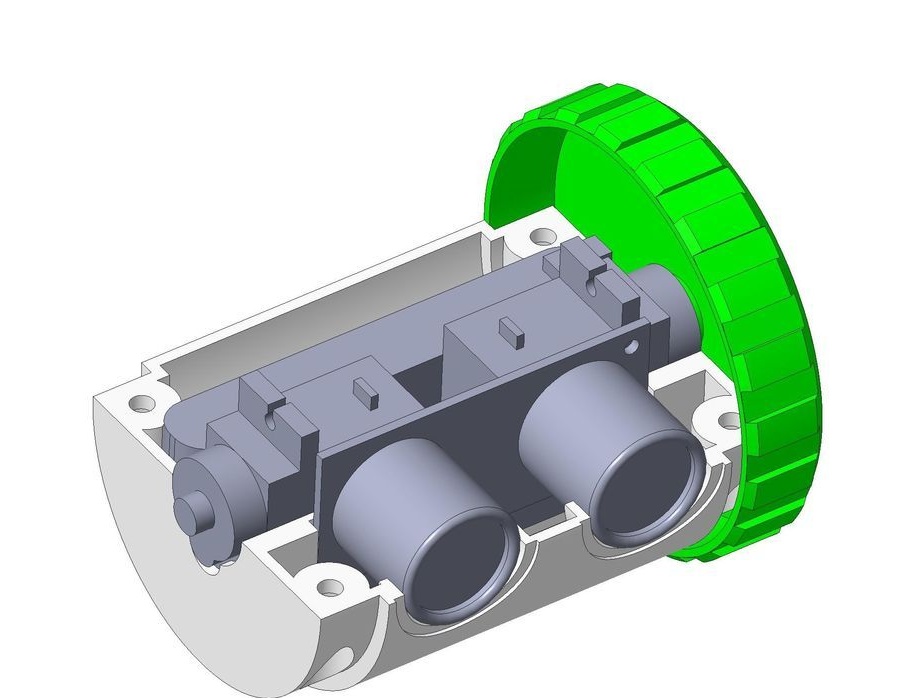
- transdutor ultrassônico tipo HC-SR04;
- interruptor ou jumper de 9x4mm;
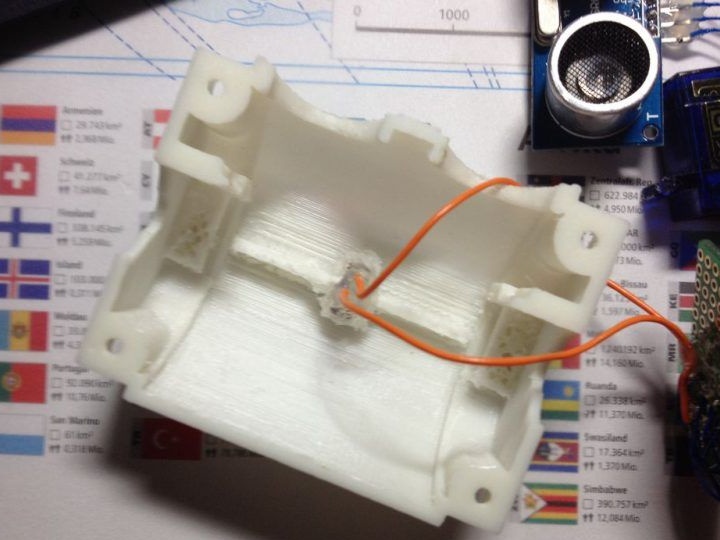
- peças 3D (possível). Serão necessárias uma parte superior (top.stl), uma parte inferior (bottom.stl) e duas rodas (wheel.stl).
Obviamente, serão necessárias ferramentas de solda, cola quente, chaves de fenda, parafusos, fios e outras pequenas coisas.

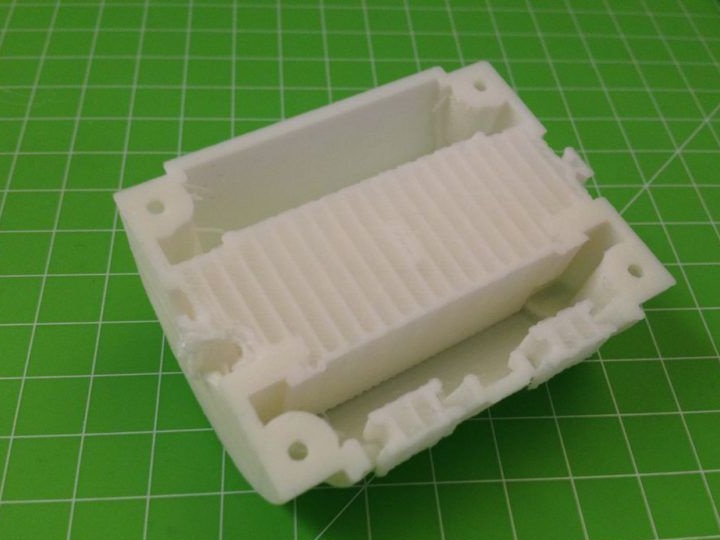
As partes superior e inferior precisarão ser impressas com a face plana para baixo usando a opção "estruturas de suporte". Dependendo do tipo de impressora usada, as peças acabadas podem precisar ser limpas no final.
O processo de fabricação do robô:
Primeiro passo Eletrônico parte do robô
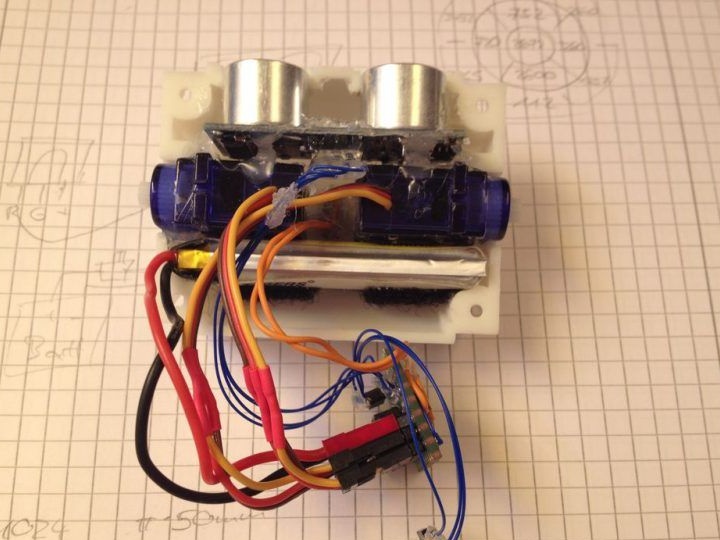
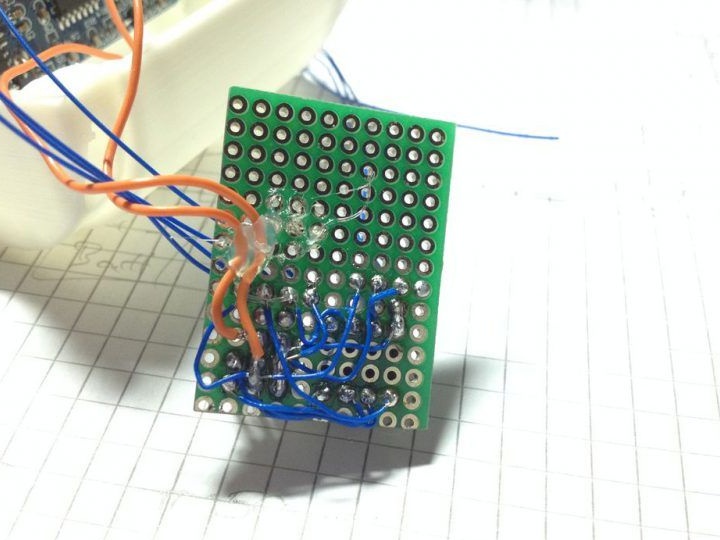
Primeiro você precisa configurar os servos, eles precisam ser convertidos em rotação contínua. Como fazer isso, existem inúmeras instruções na Internet. Bem, todos os elementos eletrônicos precisarão ser montados conforme indicado no diagrama. Para montar a parte eletrônica era conveniente, você pode pegar um pequeno pedaço de uma tábua de pão, além de fios finos.


Etapa dois A parte do software do robô
Se você abordar o processo de criação de um robô com o mais alto profissionalismo, a parte do software poderá ser escrita de forma independente. Mas, para isso, você precisará aprender uma linguagem de programação. Em uma versão mais simples, você pode baixar o código pronto e simplesmente enviá-lo para o microcontrolador.
Segundo o autor, os melhores o robô recebe sinais de infravermelho dos controles remotos da marca Sony. No futuro, será necessário "reflash" a parte do código Arduino e envie os dados através da função Serial.print (). Como resultado, será possível descobrir o que é a codificação em cada botão.
Etapa três A etapa final. Monte o robô
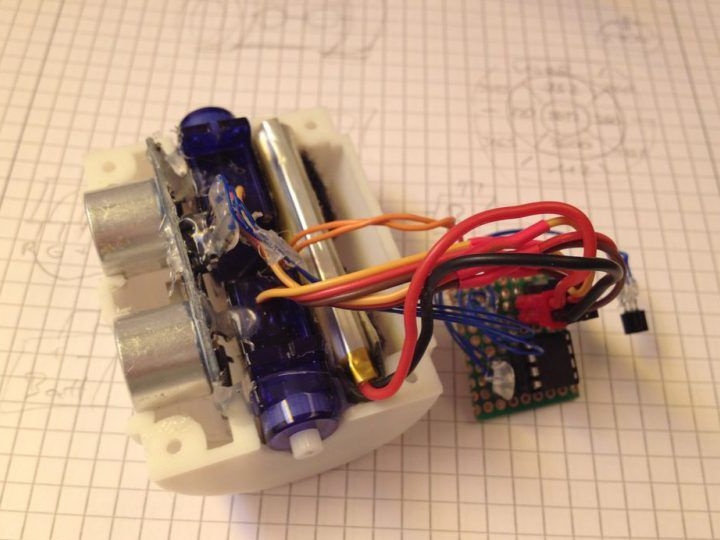
Bem, em conclusão, o robô está indo. Para esses fins, você precisará de cola quente. Com ele, é necessário fixar os fios para que eles não se soltem quando o robô se mover.Também é necessário consertar o interruptor e consertar bem o sensor ultrassônico. Em conclusão, as tampas do robô são conectadas usando quatro parafusos, como resultado, se necessário, pode ser facilmente desmontado. A propósito, parafusos para servos são perfeitos para montagem.

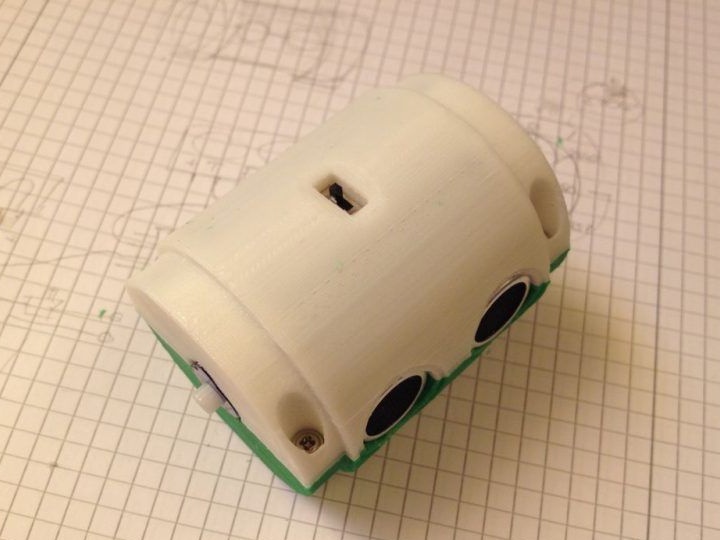
Isso é tudo, agora o robô está quase pronto. Resta instalar as rodas nos eixos do servomotor e você pode começar a testar o robô. Você pode ver em mais detalhes como o trabalho caseiro é feito no vídeo.