

No vídeo você pode ver como o robô funciona. Ele muda gradualmente de cor durante a operação.

Materiais e ferramentas para montagem do robô:
- Suportes de montagem em forma de U;
- quatro baterias LR44 de 1,5V cada;
- RGB-LED multicolorido com função de comutação;
- tubos isolantes;
- pino de aço;
- tipo de motor de baixa tensão RF-300CA;
- botão para ligar o robô (com duas derivações);
- fios para conectar o motor;
- LED de alarme piscando.
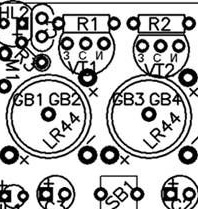

Em relação à necessária eletrônico elementos, eles são mostrados na figura. A placa de circuito impresso é feita de uma folha de PCB, suas dimensões são de apenas 30X30 mm. O autor também recomenda o uso de pequenos capacitores polares para montagem.
Processo de fabricação de robôs
Primeiro passo Diagrama esquemático do robô
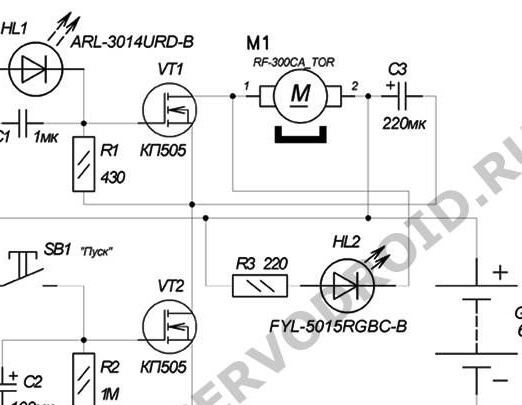
O circuito do robô pode ser visto na figura. Após inserir a bateria, o robô está no estado desligado. Para ligá-lo, pressione o botão SB1. Imediatamente após isso, o capacitor C2 é carregado instantaneamente. A placa positiva do capacitor é conectada à porta do transistor de efeito de campo VT2. Nesse sentido, quando o limiar de comutação é atingido, a resistência do canal fonte de drenagem desse canal diminui instantaneamente e uma carga potencial negativa se forma no dreno. Bem, o que acontece a seguir pode ser visto em mais detalhes no diagrama.
Etapa dois Mount RGB LED
O LED abaixo do número 1 está montado na placa de circuito impresso. No desenho, essa posição é chamada HL2. Após a instalação do LED, suas conclusões devem ser dobradas para que o LED seja direcionado para o lado. Assim, durante a operação, o LED acenderá não, mas para o lado, iluminando as paredes. Em que direção a luz brilhará é indicada por uma seta preta.

Etapa três Montar suportes de montagem da bateria
Para fornecer contato entre a bateria e o robô, são usados pinos de pressão.Um botão é instalado no centro, no diagrama é marcado como GB1, GB2 e o segundo é definido na posição GB3, GB4. Para fixar com segurança os contatos, os botões são soldados com uma grande quantidade de solda.


As baterias são instaladas no botão de metal com o número 3. As baterias são fixadas com um prendedor em forma de U, no qual são usados isoladores de tubos. A parte superior do suporte precisa ser levemente dobrada com um arco para baixo, permitindo que as baterias sejam pressionadas no contato inferior. São necessários tubos isolantes para que as faces verticais das baterias não entrem em contato com as horizontais.
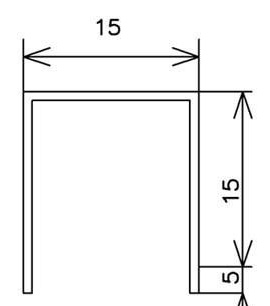
Para fazer um fixador em forma de U, você precisa usar dois clipes de papel. Eles precisam ser dobrados em forma de U, conforme indicado no desenho. Qualquer tubo pode ser usado, o cloreto de polivinil é usado aqui. A altura deles deve ser igual à altura das baterias.
Instale o suporte por solda, para isso você precisa estanhar as extremidades. Para estanhar, é necessário usar um fluxo neutro e sem lavagem.
Etapa quatro Instale o motor
O motor é instalado na lateral da placa onde os trilhos passam e está localizado com o eixo abaixado. Para prender o motor, você pode usar cola quente ou fita dupla face. Porém, antes de montar o mecanismo firmemente, é necessário conectá-lo e verificar a operacionalidade de todo o sistema.

Quinto passo Configuração e teste caseiro
Após a montagem do robô, você pode testar e configurar. Para fazer isso, você precisa instalar as baterias no robô, elas são instaladas no lugar dos GB1, GB2 e GB3, GB4. Nesse caso, os eletrônicos devem estar no estado desligado. Depois de instalar as baterias, o robô pode ser ligado, isso é feito usando o botão SB1. Depois de pressioná-lo, o mecanismo deve começar a funcionar, o LED HL1 piscará e o LED RGB também acenderá.
Depois de algum tempo, o robô será desligado automaticamente, parará e todos os diodos serão apagados. Em seguida, é ativado da mesma maneira que pela primeira vez, pressionando um botão.

Para ajustar o tempo do robô, você precisa experimentar os valores do resistor R2 e do capacitor C2, que são responsáveis por essa função. Se você precisar definir a operação máxima do robô, a capacitância do capacitor deve ser a maior possível. De uma maneira tão simples, você pode montar um robô tão interessante.