
A peculiaridade do robô BIBOT-1 é que ele pode executar duas tarefas. Ele pode se mover atrás de uma fonte de luz ou ao longo de uma linha preta que pode ser desenhada no papel. O robô com configurações muito flexíveis, ou seja, posteriormente pode ser personalizado para quaisquer condições desejadas, ou seja, para torná-lo mais sensível à luz ou menos. Também é possível ajustar a velocidade de rotação dos motores, isso permitirá que o robô funcione melhor, principalmente ao se mover ao longo da linha.

O dispositivo e o princípio do robô:
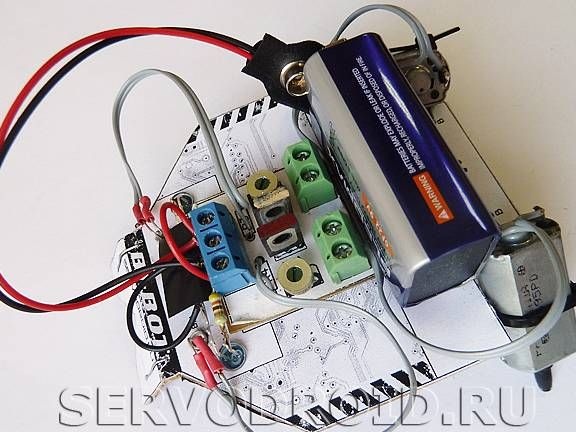
A base do robô é feita de papelão, o modelo é impresso na impressora e trava. Quanto ao módulo de componentes de rádio, um textolite foi tomado como base, o módulo é anexado à base do robô. Para tornar o corpo mais rígido, são utilizadas nervuras especiais no design.
Os motores são instalados como na maioria destes caseiro, ou seja, em um ângulo. Devido a isso, não há necessidade de colocar as rodas e a caixa de velocidades. Para impedir que os eixos deslizem sobre a superfície, são colocados protetores.
Uma bateria de 9V do tipo 6F22 é usada como fonte de energia. A bateria está presa com fita adesiva e está sempre disponível para fácil substituição.
Quanto ao interruptor, então auto decidiu evitar instalá-lo. O robô liga e desliga manipulando o clipe que é anexado à bateria.
E, finalmente, o ajuste do robô. Para ajustar a sensibilidade do robô, o sistema possui dois resistores de ajuste. Quando eles rodam, você pode ajustar a sensibilidade do robô à luz e também pode ajustar a velocidade de rotação dos motores. Quanto mais sensível o robô estiver à luz, mais rápido ele se moverá e vice-versa.
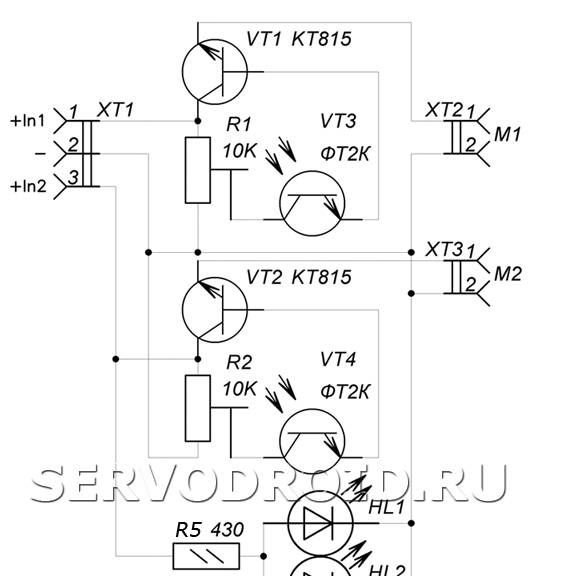
Quanto ao princípio de operação, tudo está definido no diagrama.
Materiais e ferramentas:
- Bateria de 9V e clipe para conexão;
- dois conectores para conectar motores (bornes de duas seções);
- motores;
- betonilha de nylon;
- protetor (rolo de borracha);
- dois fototransistores;
- dois LEDs infravermelhos;
- um suporte de um grampeador;
- bloco de terminais de três seções para conexão da fonte de alimentação;
- resistor de sintonia.

Processo de fabricação:
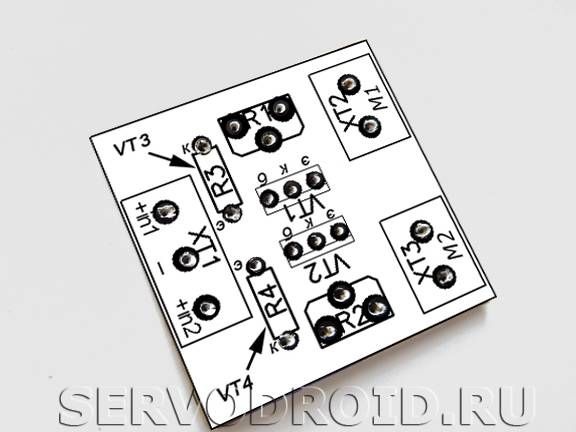
Primeiro passo Design de PCB
A taxa é criada pelo método LUT. Antes do trabalho, a superfície da fibra de vidro deve ser bem limpa e depois lavada e bem seca. Após a fabricação, as faixas condutoras devem ser verificadas com um multímetro para um curto-circuito.
Etapa dois Instalação eletrônico elementos
Em seguida, você precisa pegar um desenho impresso em papel e colá-lo no quadro criado. Nesse caso, os furos no papel e na placa de circuito impresso devem corresponder exatamente. Em seguida, os componentes de rádio são instalados conforme indicado no diagrama. No processo de trabalho, a instalação dos resistores R3, R4 precisa instalar os fototransistores VT3, VT4.
As seções extremas do bloco de terminais de três seções XT1 devem ser conectadas com um fio de montagem. Os pontos de conexão dos contatos precisam ser bem isolados; é melhor usar um tubo termo-retrátil para esses fins.
Etapa três Como criar um caso
Um desenho do corpo deve ser impresso em uma folha regular de papel A4. Em seguida, você precisa pegar um pedaço de papelão ondulado e colar um desenho; posteriormente, a caixa deve ser cortada em torno do perímetro.
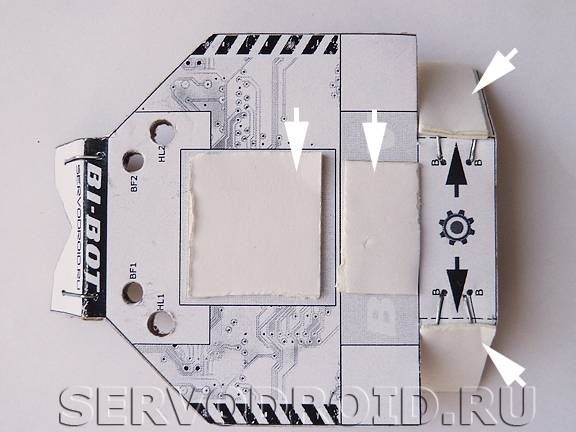
Onde o pictograma "tesoura" estiver localizado em negrito, os cortes devem ser feitos. Posteriormente, ao longo das linhas pontilhadas pretas, você precisa dobrar o papelão como na foto e colocar as setas pretas.



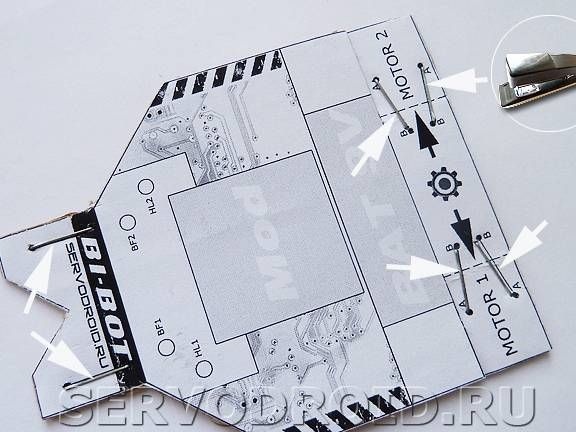


Na parte frontal e traseira da caixa, na posição especificada, usando um grampeador, é necessário instalar os suportes. Os locais de instalação são marcados por linhas pretas com círculos. Grampos são necessários para tornar o quadro mais rígido. Depois de instalar os suportes, eles são entediantes ao dobrar ao longo das linhas de dobra.
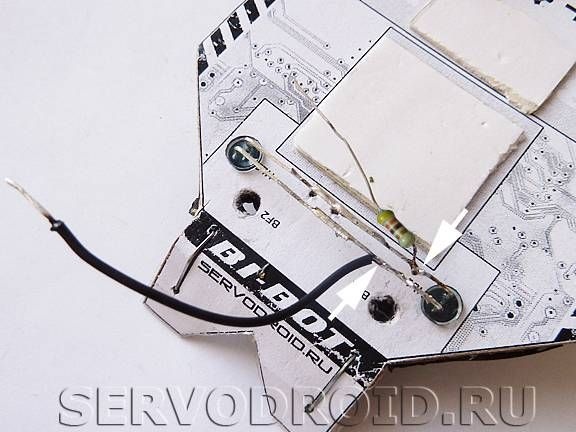
Nos locais marcados com BF1, BF2, é necessário fazer orifícios para a instalação de fototransistores. Nos locais HL1, HL2, é necessário fazer furos de tamanho que correspondam ao diâmetro da caixa dos LEDs infravermelhos.
Nos locais designados como Mod "," BAT 9V "e" MOTOR 1 "," MOTOR 2 "cole as tiras de fita dupla face.
Etapa quatro Instalação de motores
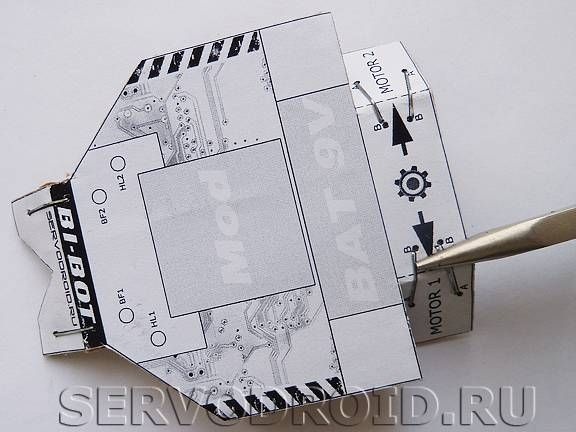
Os motores são montados em posição com laços de nylon. Para evitar que os eixos escorregem, eles devem ser usados com protetores. Eles são feitos de elásticos, que estão nas hastes de hélio das canetas. No mesmo estágio, solde os fios aos motores.


Quinto passo Instalação de LEDs infravermelhos
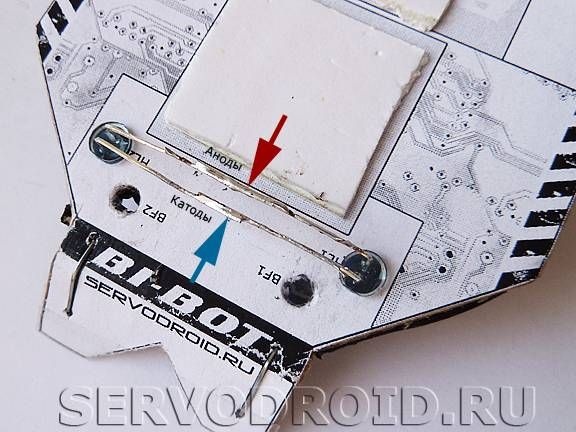
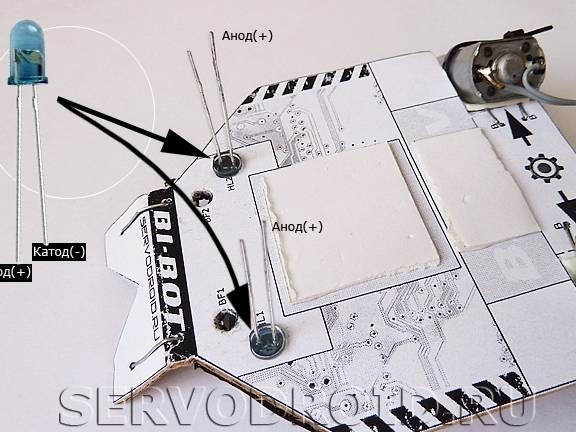
Ao instalar LEDs infravermelhos, é importante não confundir suas conclusões. Para elementos importados, um contato longo é um ânodo, ou seja, um plus. Os LEDs são instalados nas posições HL1, HL2, como mostrado na foto. As descobertas são dobradas para que os diodos possam ser conectados em paralelo.
Um resistor de 430 ohm deve ser soldado ao contato positivo dos LEDs e um fio preto ao contato negativo.
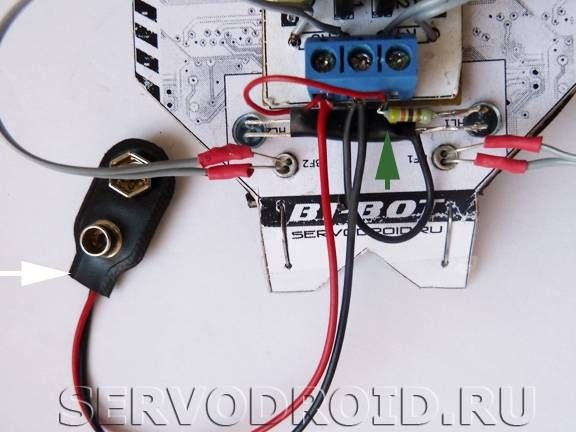
A outra extremidade do fio preto deve estar conectada ao pino central do bloco de terminais de três seções. Quanto à saída do resistor, ele é conectado ao terminal do bloco de terminais.
Etapa seis Fase final de construção
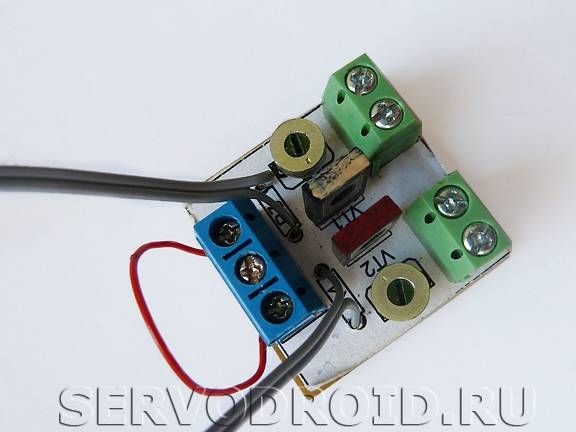
Para que o robô se mova ao longo da linha, os fototransistores são colocados no lugar BF1, BF2 como na foto.
Transistores para o movimento atrás da fonte de luz são colocados na parte traseira.
Em conclusão, os motores estão conectados e a bateria é colocada.


Isso é tudo, o robô está pronto. Agora você pode tentar ativá-lo e configurá-lo para as condições desejadas.