Na próxima sexta-feira à noite, o autor queria coletar algo interessante. Lembrando que, ele viu os projetos de desenhar robôs e, com um servo de rotação contínua, decidiu-se montar esse robô. Um servo de rotação contínua pode ser feito a partir do comum.
Materiais:
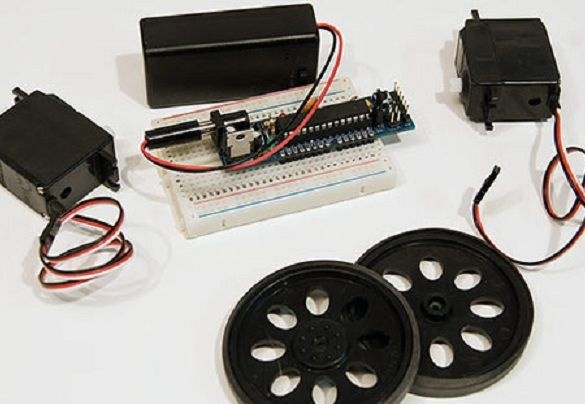
- DC Boarduino (este é um clone Arduino)
- Servo de rotação contínua de 2 peças
- Servo rodas 2 peças
- tábua de pão
- Conector de bateria de 9V com plugue e interruptor de 2,1 mm
- fios de conexão
Não é necessário usar o Boarduino neste projeto, qualquer placa do Arduino é suficiente. O autor escolheu este fórum devido ao seu tamanho. Você também precisará de um certo número de marcadores; pode comprar um conjunto de cores diferentes para este robô.
Além disso, você precisa de uma bateria de 9V e a base para o corpo do robô de desenho.
Não há nada complicado na montagem do robô. Primeiro, o autor prende as rodas com dois servos com fita adesiva e mede a distância entre as rodas. É necessário que a largura da base seja ligeiramente menor que a distância entre as rodas. O autor usa plástico corrugado, pois é bastante leve e durável, e não é difícil trabalhar com ele. Seu uso, é claro, não é essencial, você pode até usar papelão ou plástico de caixas para discos.
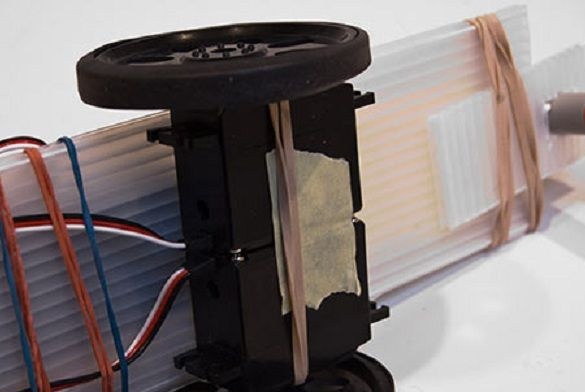
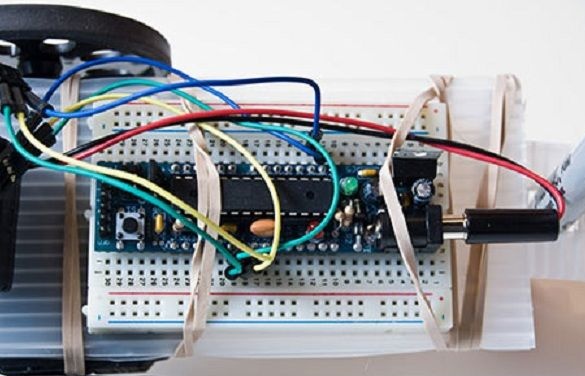
Servo drives foram conectados à base com elásticos. Ao colocar a bateria e a placa de ensaio, surgiram dificuldades, pois era necessário manter um equilíbrio. O autor queria abrir mais espaço no lado com o qual o marcador foi colocado, mas não quis tirar vantagem do lado oposto. Com a ajuda de elásticos, é bastante simples ajustar a localização dos componentes, determinando o ideal.
Durante todo o projeto, fios com pinos BLS são usados para conectar à tábua de pão, servoconversores também são conectados a eles.
Quando o autor terminou todo o trabalho de montagem do robô, ele imediatamente quis verificar seu desempenho. Demorou algum tempo para procurar o código. Tendo encontrado um artigo sobre como controlar o servo de rotação contínua Parallax usando o Arduino, ele percebeu que estava no caminho certo. O código foi simplificado o máximo possível, no momento o Drawbot pode apenas ir em círculos.Obviamente, isso é primitivo, mas também é um ótimo começo e a base para o desenvolvimento e a modernização. O código pode ser baixado no artigo.
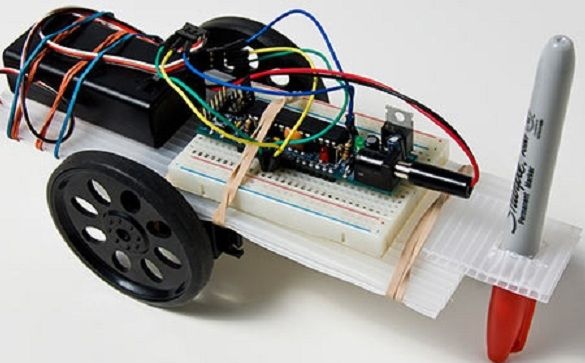
Agora, o autor recebeu um robô que viaja em círculo. Continuando o trabalho, o autor pegou os restos de plástico corrugado e fez um buraco nele com a ajuda de uma faca. O orifício foi cortado com um diâmetro ligeiramente menor que o necessário, graças ao orifício reduzido em que o marcador estava perfeitamente fixado. Se você usar papelão, esse efeito não será e o marcador não ficará bem ou cairá.

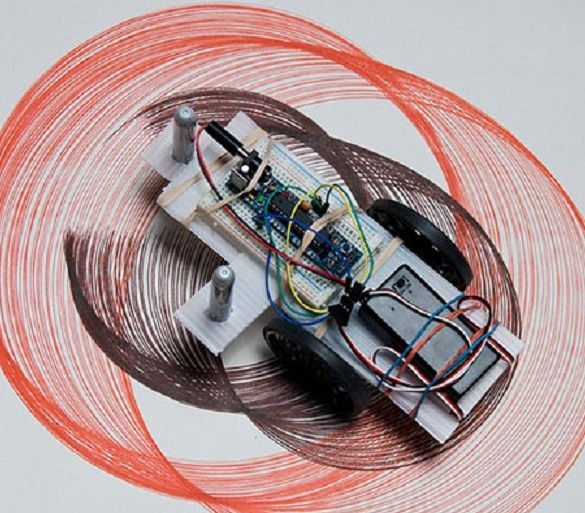
Depois de instalar o marcador, é hora de testar o robô. Ao colocá-lo no centro da planilha 24x18 e ativá-lo, o autor finalmente viu o Drawbot em ação. Ele começou a girar desenhando círculos. Podemos dizer que o autor conseguiu criar um robô que cria um tipo de obra de arte.
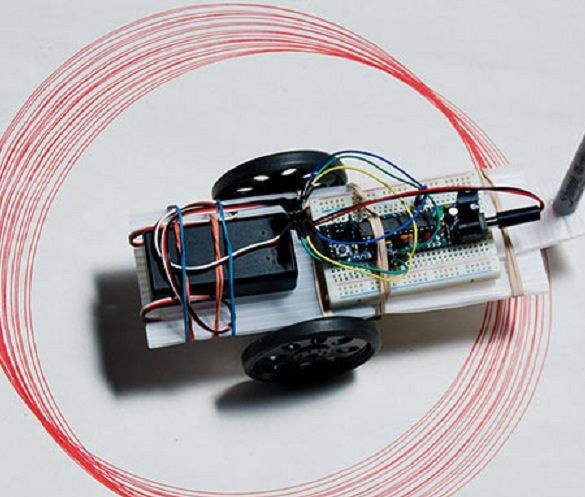
A imagem saiu um pouco estranha devido ao lençol deitado no chão, e não era exatamente uniforme e, muito provavelmente, os servos não giravam em sincronia. Aconteceu que um círculo poderia ser mais baixo, o segundo mais alto e o próximo ainda um pouco mais alto ou mais baixo. Provavelmente, em um local ideal, todos os círculos seriam alinhados em uma linha. Ficaria mais bonito na aparência.
O autor pensou que o segundo marcador poderia alegrar a situação e o robô fará fotos mais interessantes. O resultado foi bom, círculos começaram a se cruzar. Será mais interessante ver como o Drawbot se comporta em uma grande folha de papel.
Ao liberar o robô em uma superfície de papel, o autor pode obter um círculo ou vários círculos. Mas, com um robô pronto, você já pode pensar em melhorá-lo alterando o código.