
Esse o robô controlado pelo smartphone bluetooth. O acelerômetro do smartphone mede o ângulo do telefone para a esquerda / direita, para cima / para baixo, usa esses dados para calcular a velocidade dos motores direcionais, os dados são transmitidos via Bluetooth para Arduino
O que você precisa para construir um robô.
Arduino uno, módulo Bluetooth HC-06, dois motores de engrenagem de 300 RPM 12v, controlador H-bridge L298N de ponte dupla H
12 a 1,3 Uma bateria de chumbo-ácido. Cada mecanismo consome 0,4A, mais o consumo da lógica do driver. Fios do Arduino, baterias comuns de 9V e um conector para conectar a bateria ao Arduino. Fios elétricos para conectar drivers de motores elétricos. Cabo USB. Telefone com Android versão 4 e superior. 4 rodas giratórias de borracha de 50mm da Screwfix ou Toolstation; dois hubs universais Lynxmotion HUB-02.










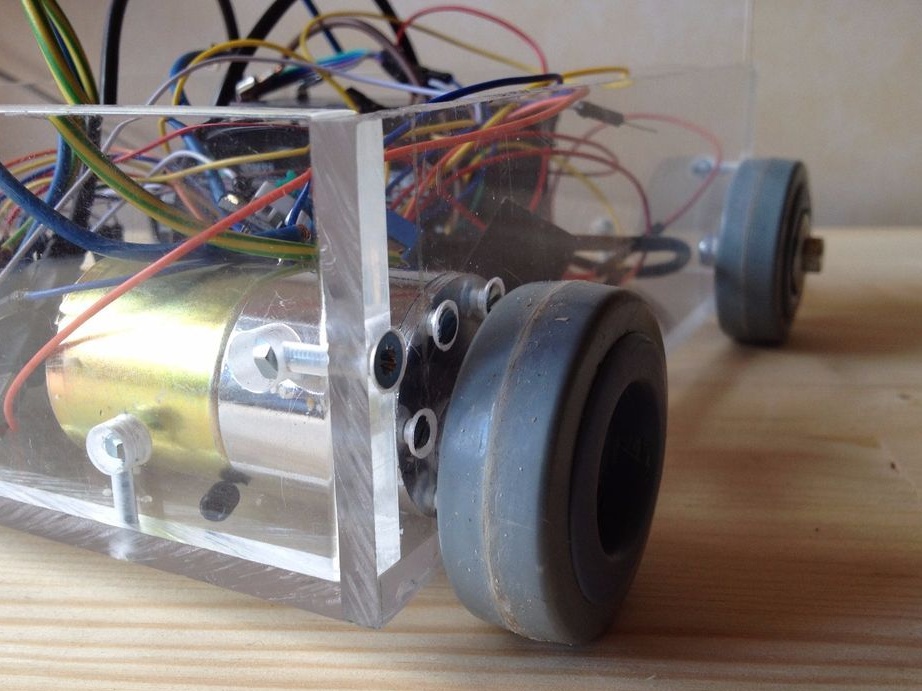
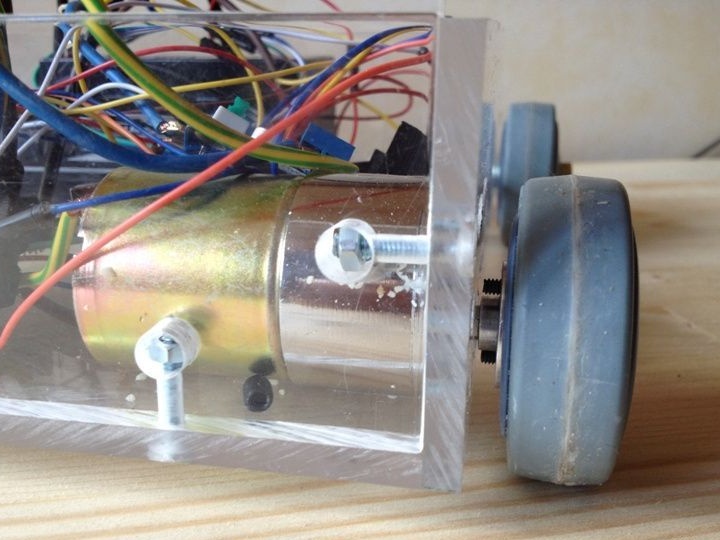
O estojo é montado em plástico de 22 cm de comprimento e 17 cm de largura. Dois motores devem ser conectados ao eixo e fixados com um pino rosqueado.
Rodas dianteiras
A borracha é removida dos roletes e dois furos são feitos de acordo com os furos nos cubos. Os cubos são fixados nos eixos que passam pelo alojamento com pinos rosqueados. Depois disso, os rolos são fixados nos cubos e a borracha é colocada sobre eles.
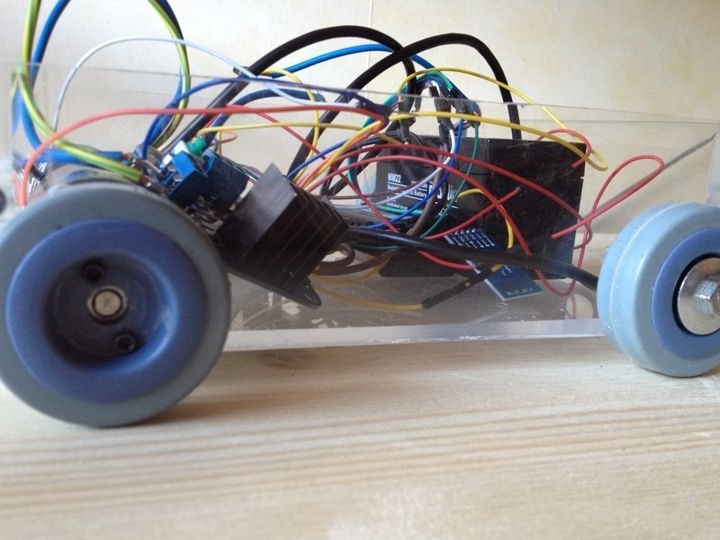
Rodas traseiras
As rodas traseiras são simplesmente desaparafusadas da dobradiça e presas através de orifícios feitos na carcaça.
Conexões elétricas.
Ocorrerão problemas ao carregar o código do programa no Arduino. Isso se deve ao fato de o módulo Bluetooth, seus contatos RX \ TX, estarem conectados aos pinos 1 e 2 do Arduino, que também são usados para transferir dados via USB. É necessário alterar os contatos 1 e 2 para 11 e 12 na biblioteca conectada, que será usada para a transferência de dados.
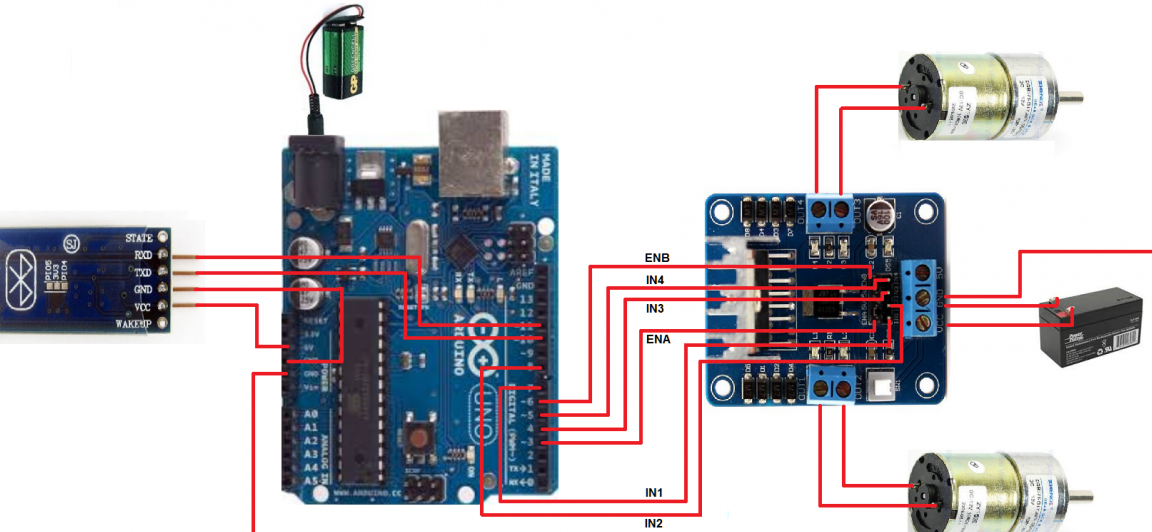
O driver do motor não precisa de uma fonte de alimentação separada para a lógica. 12V é suficiente para alimentar a lógica do motorista e o próprio motor. O menos da bateria deve ser conectado ao Arduino e ao driver do motor. Os contatos do driver do motor ECA / 5V e ENB / 5V podem ser ligados em ponte. Ele deve ser removido antes de conectar ao Arduino. Nada deve ser conectado aos dois pinos de 5V.
Código Android.
O arquivo anexado deve ser descompactado e importado para o Android Studio, empacotado no apk e instalado no telefone.
Arquivos principais:
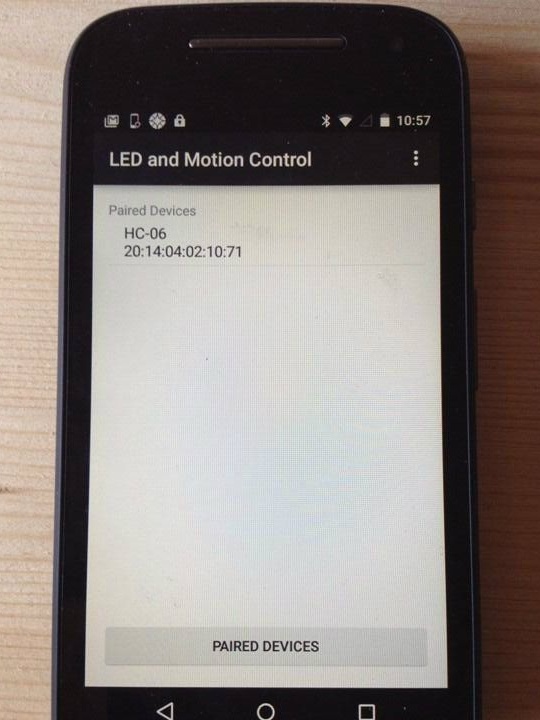
Atividade de dispositivos emparelhados:
deviceList.java
activity_device_list.xml
LED e atividade de controle de movimento:
ledControl.java
activity_led_control.xml
Manifesto:
AndroidManifest.xml
Atividade de dispositivos emparelhados mostra os dispositivos Bluetooth disponíveis. Assim que os dispositivos são conectados, o controle é transferido para o LED e a atividade de controle de movimento.
Os botões liga / desliga enviam uma mensagem “on” ou “off” para o Arduino, ligando ou desligando o LED embutido. O acelerômetro do telefone, que transmite valores x / y do sensor, sempre que esses valores mudam, controla o movimento. Com base nisso, o Arduino calcula a velocidade e a direção de rotação dos motores na faixa de 0 a 255. Ele transmite esses valores do Arduino na forma de 'L-255:' ou 'R100' etc. Com base nisso, o Arduino envia os comandos de velocidade de rotação do motor esquerdo para a ENA, o direito para ENB e altera a direção da rotação alterando a polaridade para IN1, IN2 para a esquerda, N3 e N4 para o motor direito.