

Interessante e não complicado o robôque se move atrás de um objeto de uma determinada cor.
Para determinar a posição do objeto, é usada uma câmera do smartphone, montada no chassi do robô. Você pode usar um construtor pronto, sobre o qual eu já escrevi aqui. Aqui está uma lista do que o autor precisava. Com exceção do smartphone, o custo deste robô foi de US $ 60
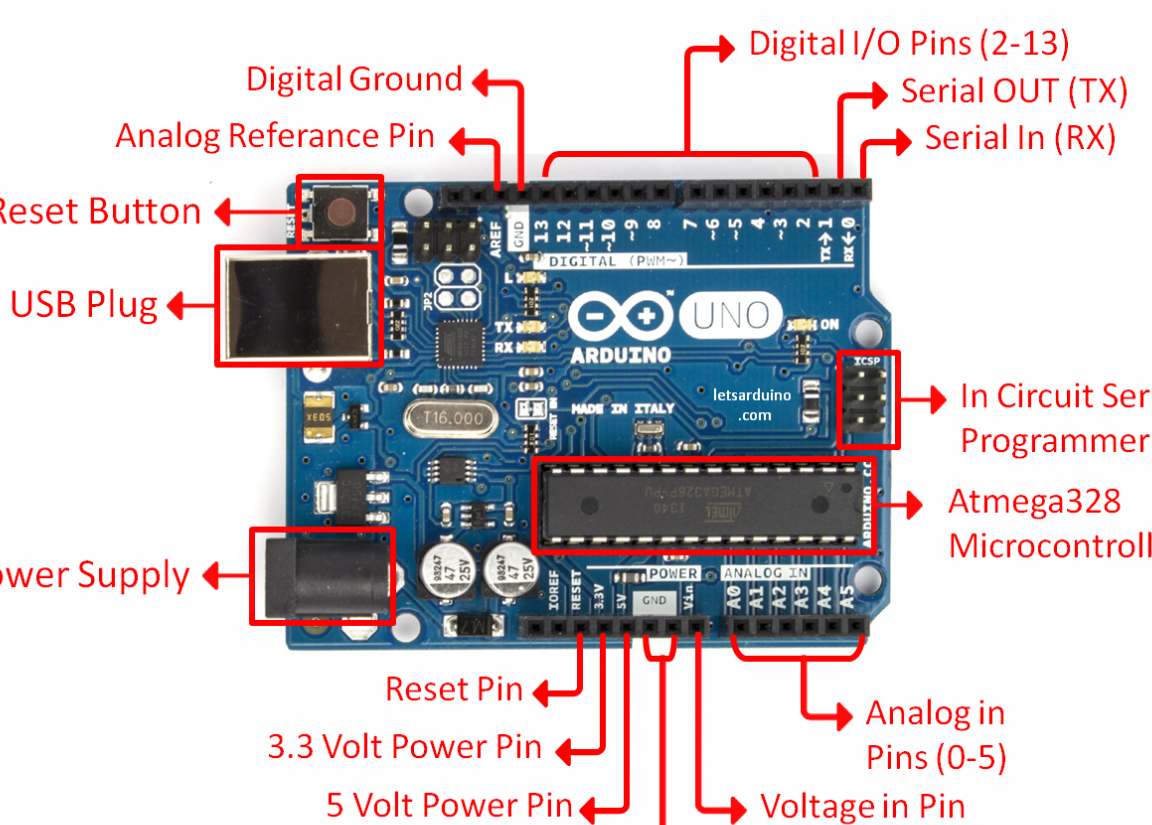
- Arduino Uno
- Smartphone com sistema operacional Android
- Chassi de robô
- cabos para conexão
- Ponte H para motores de corrente contínua (autor pololu TB6612FNG)
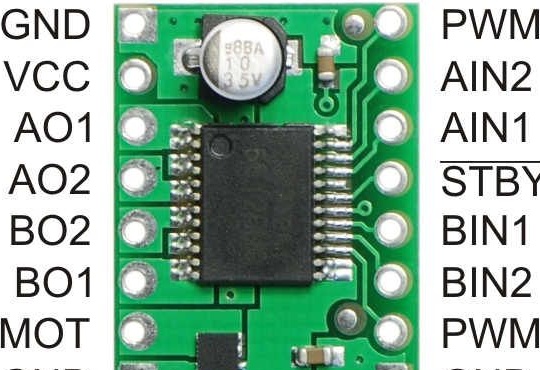
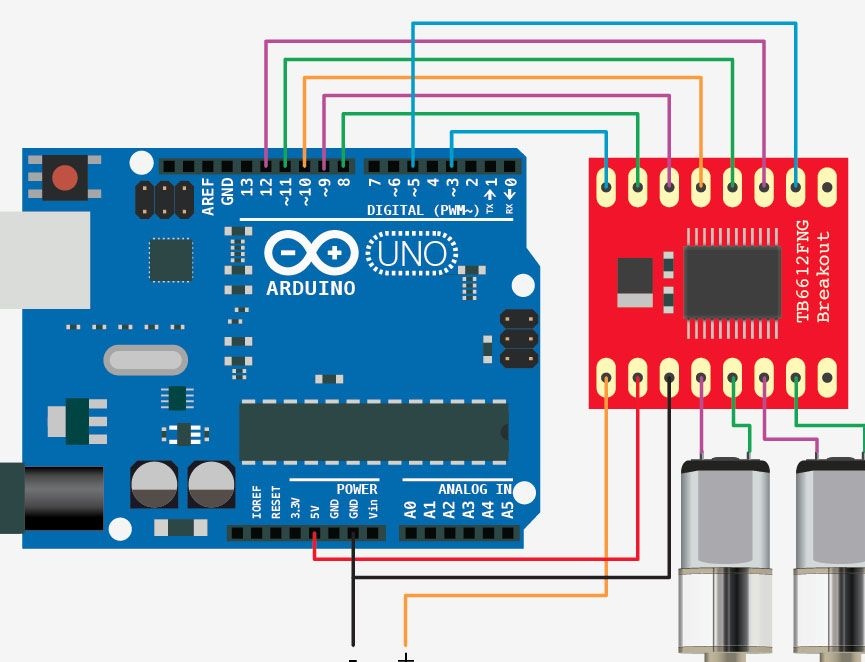
A imagem mostra como o TB6612FNG e o Arduino Uno se conectam
Conclusões do condutor e pelo que são responsáveis:
1) GND - Conecte-o aos pinos GND no Arduino
2) VCC - Tensão de alimentação da lógica do driver. Conecte-o ao pino de 5V no Arduino.
3) A01 - contato de saída, conectado ao terminal positivo do motor A.
4) A02 - contato de saída, conectado ao polo negativo do motor A
5) B02 - contato de saída, que é conectado ao polo negativo do motor B.
6) B01 - contato de saída conectado ao terminal positivo do motor B
7) VMOT- Tensão de saída dos motores. Conecte-o ao pólo positivo da bateria. (Para alimentar os motores)
8) GND - Conecte-o ao terminal negativo da bateria.
9) GND - Conecte-o ao pino GND no Arduino.
10) PWMB-PWM do driver do motor para ajustar a velocidade do motor B. Conecte-o a qualquer um dos pinos do PWM no Arduino e especifique o valor da velocidade do motor de 0 a 255.
11 e 12) e BIN2 BIN1 - Contatos de entrada do acionador do motor para o motor B, que determinam a direção de rotação do motor B. Conecte-o a quaisquer dois pinos digitais do Arduino.
13) STBY - Conecte-o a qualquer saída digital. Quando instalado em um nível alto, inclui um driver
14 e 15) AIN1 e AIN2- Contatos de entrada do acionador do motor, que indicam o sentido de rotação do motor A. Conecte-o a quaisquer dois pinos digitais do Arduino.
16) Saída PWMA-PWM do acionador do motor para ajustar a velocidade do motor A. Conecte-o a qualquer um dos pinos PWM no Arduino e especifique o valor da velocidade do motor de 0 a 255.
Módulo Bluetooth HC-06
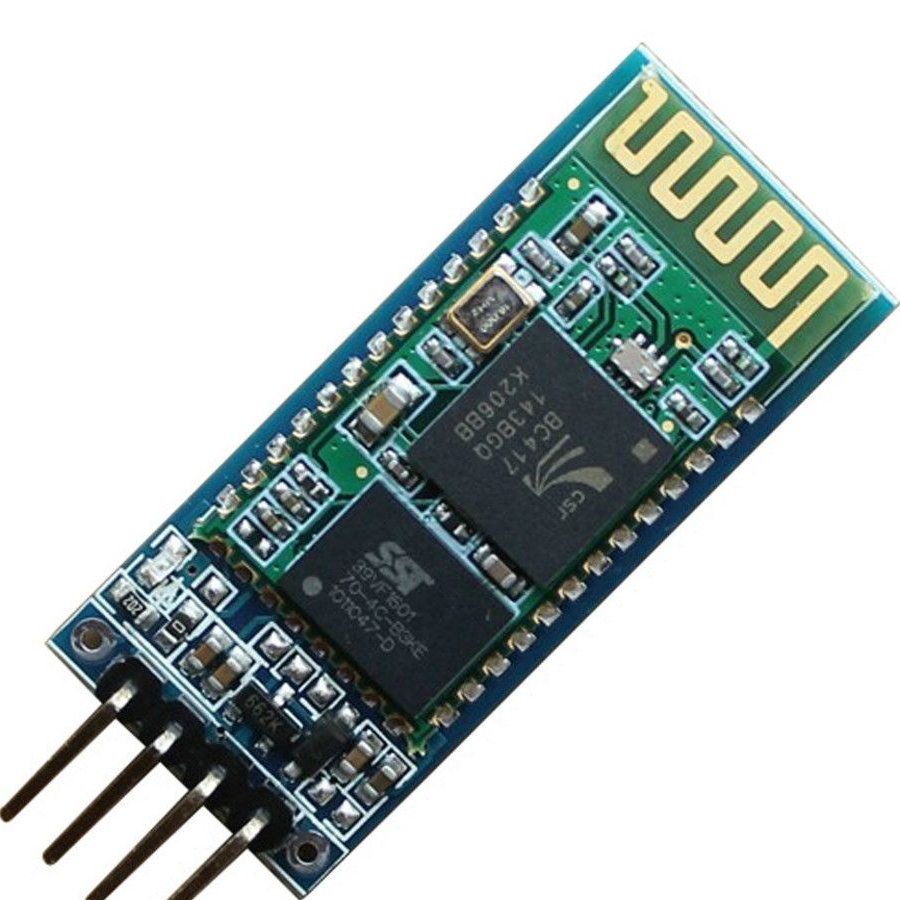
Aliexpress custa cerca de US $ 6
Como tudo isso funciona?
Este projeto usa um smartphone Android com um aplicativo especial que processa informações da câmera para determinar onde está o objeto vermelho, calcula suas coordenadas

bitmap = Bitmap.createBitmap (mRgba.cols (), mRgba.rows (), Bitmap.Config.ARGB_8888); Utils.matToBitmap (mRgba, bitmap);
int x = 0;
int y = 0;
int all_x = 0;
int all_y = 0;
while (x <176) {
enquanto (y <144) {
int pixel = bitmap.getPixel (x, y);
int redValue = Color.red (pixel);
int blueValue = Color.blue (pixel);
int greenValue = Color.green (pixel);
if (redValue> 200 && blueValue <70 && greenValue <70) {
pontos ++;
all_x = all_x + x;
all_y = all_y + y;
}
y ++;
}
x ++;
y = 0;
}
y = 0;
x = 0;
x_center = all_x / pontos;
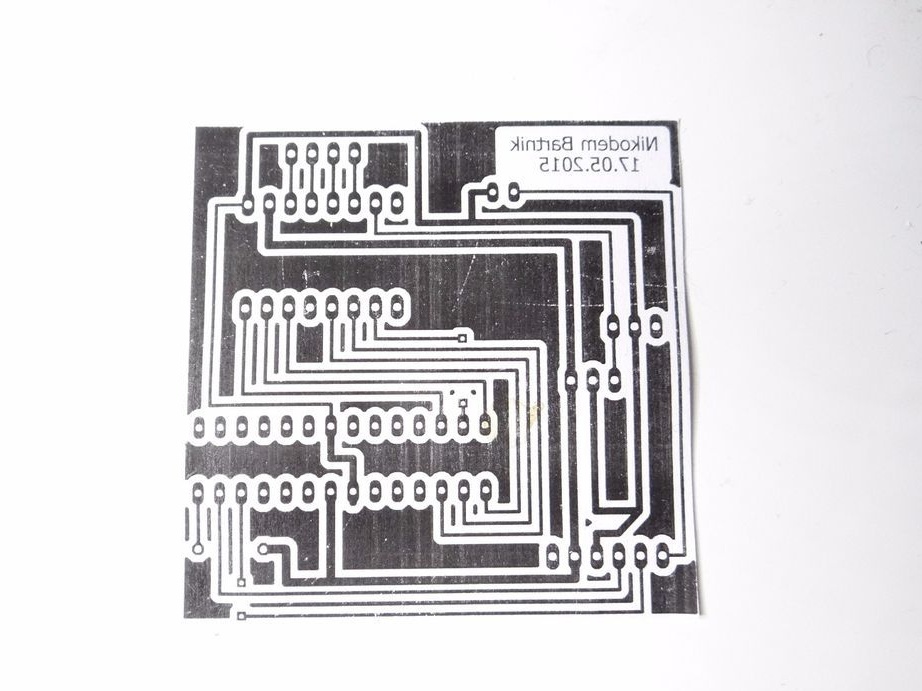
y_center = all_y / pontos;No arquivo, o diagrama de conexão e a placa de circuito impresso do robô, para quem não deseja comprar o Arduino UNO
O que é necessário para a montagem:
- Tudo o que foi mencionado acima, atmega 8, 128 ou 328
- LED, independentemente da cor
- estabilizador linear de 5v (para versão sem Arduino)
- Conectores de pino M e F
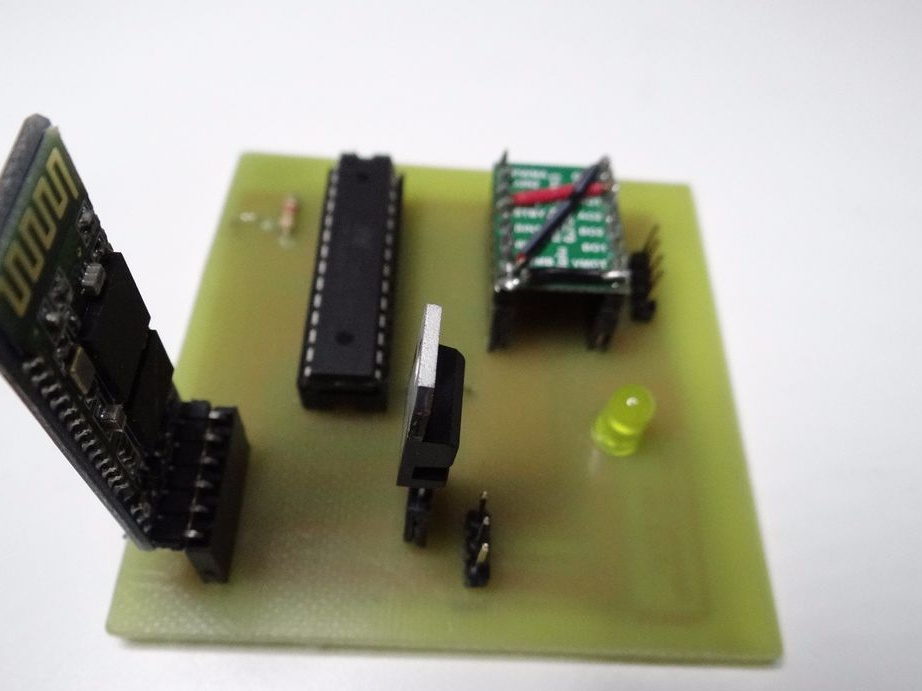
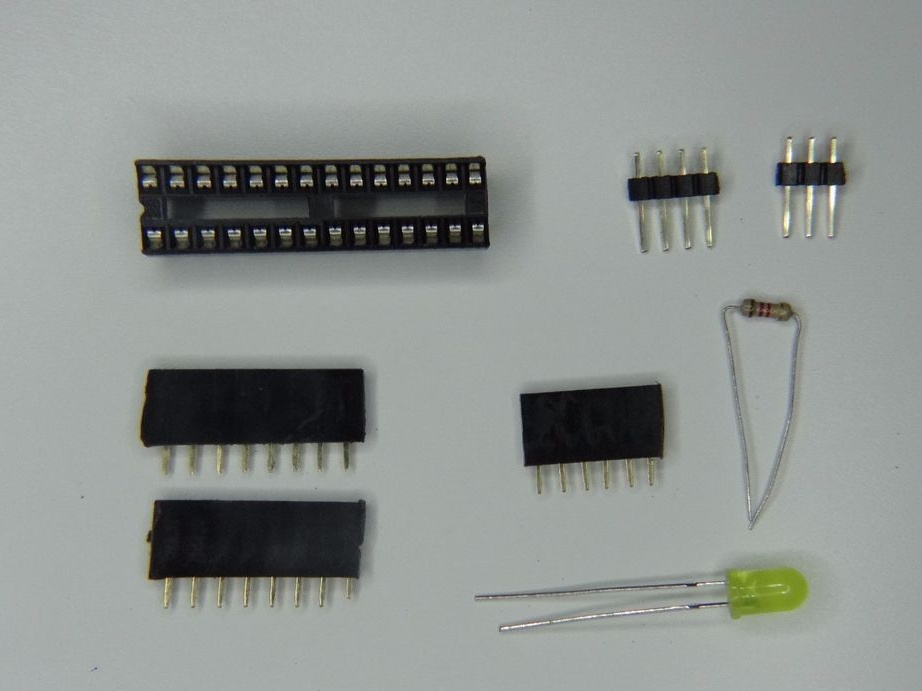
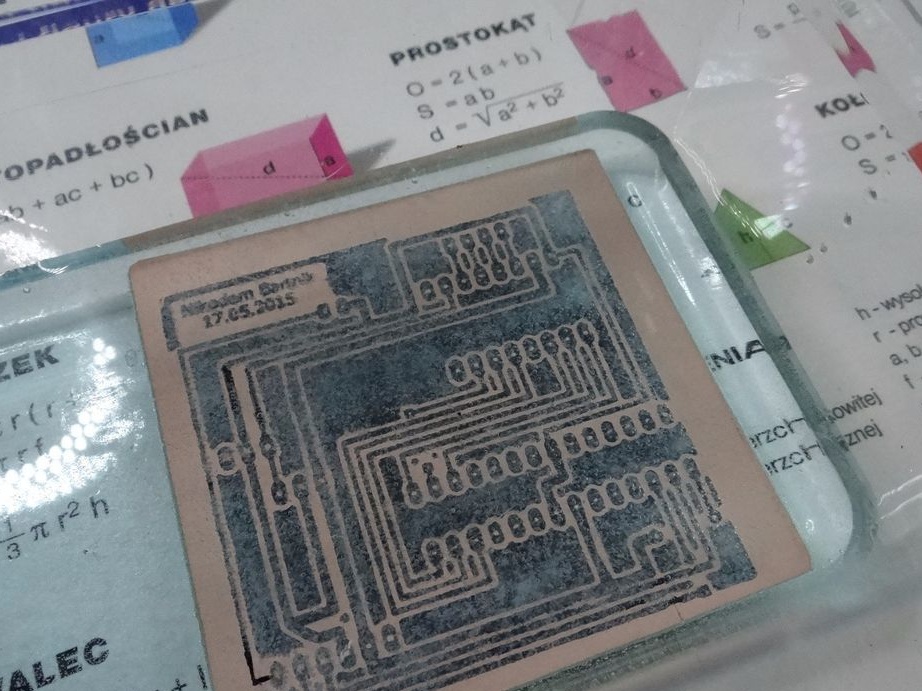
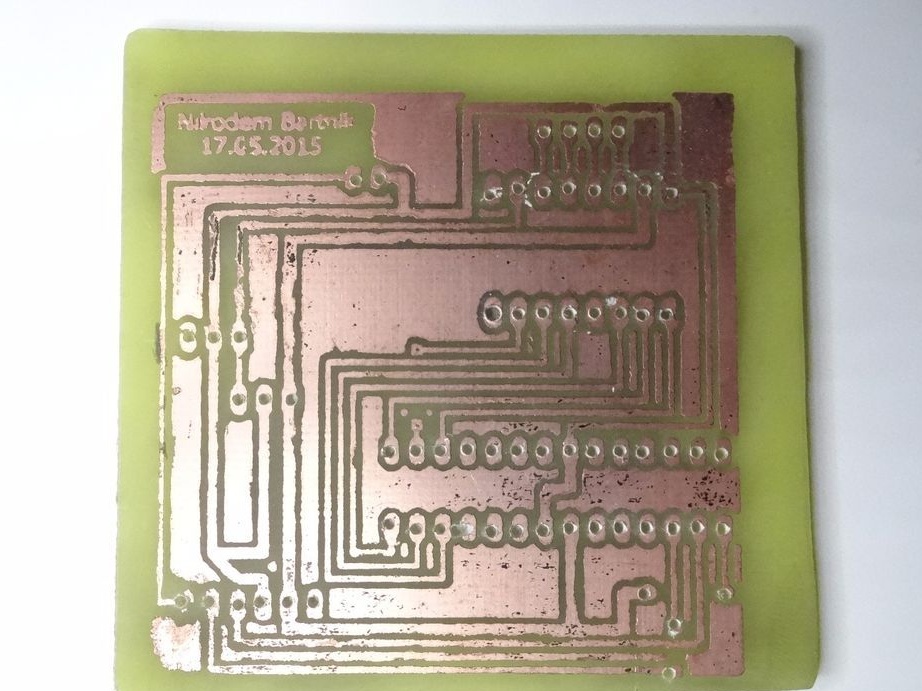
- PCB gravado e perfurado (para versão sem Arduino)
- Broca, ferro de soldar.
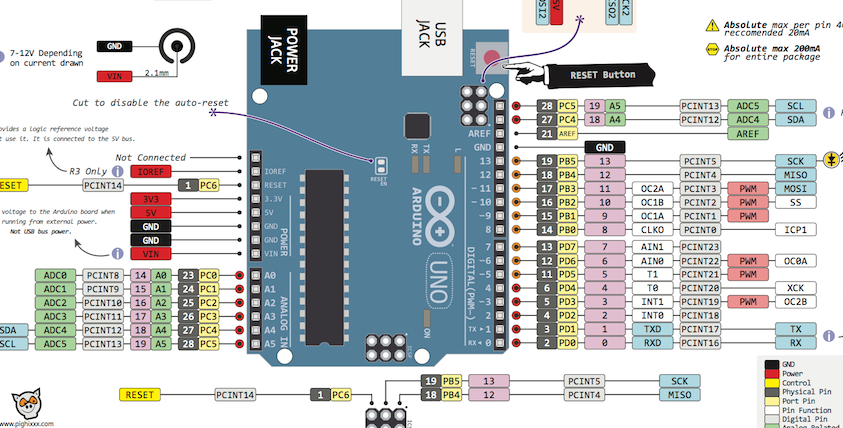
- Arduino Uno. Para quem não sabe quais conclusões o Arduino Uno são necessárias, na descrição do arquivo em anexo.
Programa para Arduino
O programa para o Arduino é muito simples. O código de arquivo para este programa.
Programa para telefone
Neste arquivo, o programa para o telefone é instalado, como um aplicativo comum, e o código-fonte do programa.importe-o para o Android studio, colete o arquivo apk e instale-o no seu smartphone.
Este programa usa Bluetooth apenas para enviar dados. A descrição da biblioteca (openCV) pode ser encontrada na Internet. O autor fez uma placa de circuito impresso para o atmega 328. Lembre-se disso se você não usar uma placa de ensaio, mas irá distribuir seu sinal: