

Vibrobots são assim robôsque se movem devido a vibrações. Apesar de seu design ser bastante simples, eles não são menos impressionantes no trabalho do que seus irmãos tecnicamente mais sofisticados. Esse robô usará cerdas como motor, esse é um tipo de perna.
O robô descrito no artigo pode alterar independentemente a trajetória do movimento e, por si só, circunda os obstáculos. Como experimento, o autor criou dois robôs nos quais diferentes fontes de energia e motores foram instalados. Em princípio, não há padrões rígidos em relação aos materiais utilizados, o principal é aderir ao esquema especificado ao montar o robô.

Materiais e ferramentas para fabricação:
- laços de nylon no tamanho 3x150mm;
- fita isolante de cor preta;
- bateria de 9 volts (6F22);
- disco a laser (CD ou DVD sem diferença);
- um invólucro protetor;
- conector de bateria de 9 volts;
- excêntrico (apagar).

O processo de fabricação do robô:
Primeiro passo Crie a base do robô
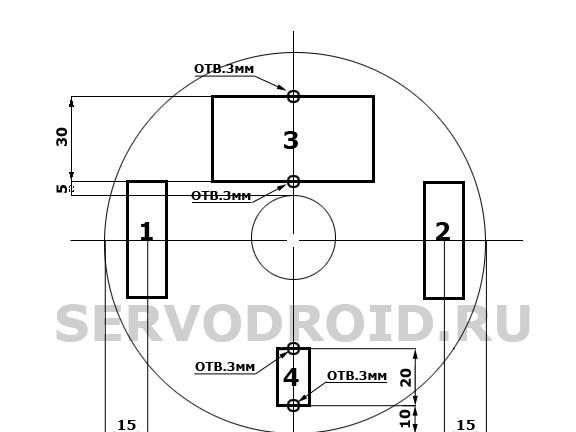
Como base para o robô, será usado um CD ou DVD comum. Faça furos claramente de acordo com o esquema, que é apresentado na foto. Sem exceção, todos os furos são perfurados com uma broca de 3 mm. Esse diâmetro é suficiente quando usado para prender laços de nylon. Se você decidir usar um método diferente de fixação, os furos poderão ser perfurados para qualquer outro tamanho. O desenho proposto é adequado para qualquer montagem do robô.
Os números 1 e 2 indicam os locais de instalação das escovas, uma bateria é instalada no quadrado com o número 3 e um motor é montado no quadrado 4.
Etapa dois Fabricamos e instalamos motores
Graças à propulsão, o robô se moverá. Para fazê-los, você precisa levar duas escovas de dente. É melhor que as escovas sejam iguais em altura e forma. Se a forma for diferente, pode ser corrigida com uma tesoura.
Agora as cerdas precisam definir a direção. Para isso, tira-se fita adesiva e as cerdas são enroladas da mesma maneira que indicado na fotografia. Nesta posição, o pincel deve ser mantido por cerca de uma hora, para que as cerdas lembrem-se dessa posição. Na foto, a seta cinza indica a direção em que as cerdas estão inclinadas.

Depois de definir a forma desejada, é necessário cortar a peça com as cerdas da escova de dentes. Então você precisa pegar a pistola de cola e instalar as cerdas no disco nos locais especificados. Todo o trabalho deve ser realizado com rapidez e precisão, pois a cola quente esfria rapidamente e endurece.Você precisa tentar instalar os pincéis para que fiquem paralelos um ao outro.
As cerdas das escovas devem estar voltadas para trás, em outras palavras, em direção à bateria a 9 volts. Durante a operação, o robô se moverá na direção das cerdas, ou seja, o local da bateria será a parte traseira do robô.

1 - disco, 2 - adesivo termocolante, 3 - orifícios para a instalação do motor, 4 - orifícios para a instalação da bateria. As setas brancas indicam a direção das cerdas.
Etapa três Fazendo um excêntrico
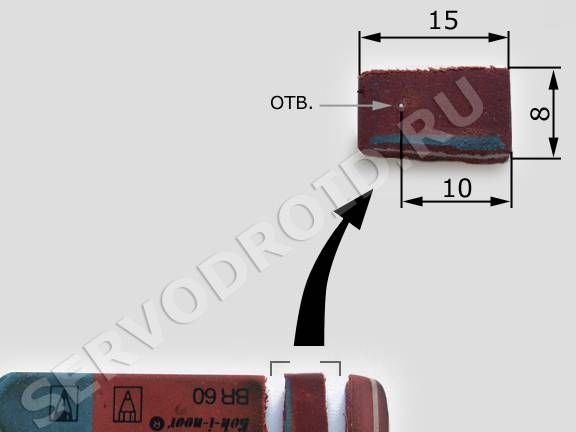
Para obter vibração, um excêntrico, isto é, um objeto desequilibrado, deve ser colocado no eixo do motor. O autor fez um excêntrico da borracha cortando um pedaço de tamanho adequado. Faça um buraco no local indicado pela seta branca. Não deve ser grande, pois o excêntrico deslizará para fora do eixo do motor. Pode ser feito com uma agulha.
Etapa quatro Produção de uma capa protetora.
Como a vibração é criada pela borracha rotativa para o robô funcionar, é aconselhável proteger esse local de vários objetos. Além disso, essa proteção dará ao robô uma aparência mais interessante. A capa protetora é feita de papel, que consiste em várias camadas. Você precisa fazer um cilindro sem papel; seu tamanho depende do tamanho do mecanismo. Para dar mais rigidez ao papel, ele pode ser manchado com cola e, portanto, aplicar mais algumas camadas. Ou você pode usar papelão para esses fins.
Para criar uma forma cilíndrica, o motor é simplesmente embrulhado com papel na parte superior.




Quinto passo Montagem final do robô
O motor é instalado em um local específico e depois fixado com uma mesa de nylon. Essas mesas podem ser compradas em lojas especializadas na venda de materiais de construção.
A bateria também está conectada com precisão. É importante considerar que a bateria deve estar claramente centralizada, caso contrário, a trajetória do robô pode mudar. A propósito, dessa maneira, no futuro, é possível definir a trajetória do movimento caseiro.


Agora, entre o conector do clipe e o motor, você precisa instalar um pequeno interruptor. Em conclusão, resta conectar o conector do clipe à bateria e você pode começar a testar o robô. Os fios são conectados por cor.
No entanto, ao usar uma bateria Kron, não é necessário instalar um switch; você pode ligar o robô conectando o conector.
Bem, para a segunda versão do robô, você pode simplesmente remover a bateria do dispositivo, mas é claro que a troca é mais promissora.
Isso é tudo, o robô está pronto, você pode começar a testar. Para alcançar o resultado desejado, você pode tentar alterar a polaridade, para que o motor gire na direção oposta e o robô se comporte de maneira diferente.