O artigo discutirá como fazer um vibro-robô em miniatura faça você mesmo. Tais robôs quando ativados, eles começam a dançar em uma superfície lisa, girando círculos sobre a mesa. Isso ocorre porque um peso desequilibrado é instalado no motor, o que cria vibrações. Todos podem montar um robô em casa, isso requer um mínimo de habilidades e materiais.
Especificamente, este o modelo O robô foi chamado Itty Bitty. Aqui, um motor vibro de um telefone celular antigo é usado aqui, e o robô é alimentado por uma bateria de relógio de 3V.
Materiais e ferramentas para criar um robô:
- bateria plana de 3V;
- motor de vibração de um celular antigo;
- um clipe de papel grande;
- ferro de solda com solda e fluxo;
- fita isolante;
- cola quente;
- marcador de cor escura.

Das ferramentas você precisa de um arquivo, álcool e alicate.
O processo de fabricação do robô:
Primeiro passo Crie as pernas do robô
Criar as pernas do robô é o momento mais crucial dessa coisa toda. A operação de todo o robô dependerá de como eles são feitos corretamente. Antes de tudo, as pernas devem ser fortes, uma vez que, com vibração, o robô salta com muita força. Eles são feitos de um único pedaço de arame. Um clipe de papel é mais adequado para esses fins. Primeiro de tudo, ele deve ser endireitado e depois dividido em 6 partes iguais. Como resultado, o comprimento de cada peça individual será de 1/16 de polegada.



Um ponto importante ao trabalhar com um clipe de papel é a suavidade do movimento. Se você dobrar o clipe muito rapidamente, ele poderá quebrar. Se os ângulos se estendem além de 90 graus, eles devem ser arredondados.
Agora você precisa tomar uma marca e dobrar o clipe em 90 graus neste local; na outra marca, você deve dobrar na direção oposta. Se o final do clipe for arredondado durante a dobra, isso reduzirá muito a probabilidade de uma fratura.



Na terceira marca, você precisa fazer uma dobra de 90 graus, mas o local da dobra deve estar o mais longe possível do final.
Na quarta marca, é feita uma curva de 180 graus, o final deve estar para trás.
Uma flexão de 90 graus é feita na quinta perna e deve estar o mais longe possível das outras duas pernas adjacentes. Em conclusão, as pernas precisam ser ajustadas para que todos não toquem o chão uniformemente.


Etapa dois Instalação do motor
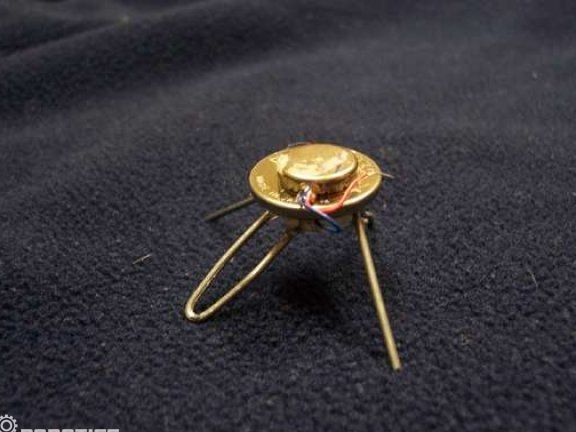
A bateria atua como um elemento de suporte em um robô. Você precisa tomar um tremor e colar um vibro-motor nele. Depois disso, um dos fios do motor precisa ser soldado ao contato da bateria, este será o contato superior. Para depositar a solda, a bateria precisa estar levemente arranhada, isso pode ser feito com um arquivo.

Etapa três Cole as pernas
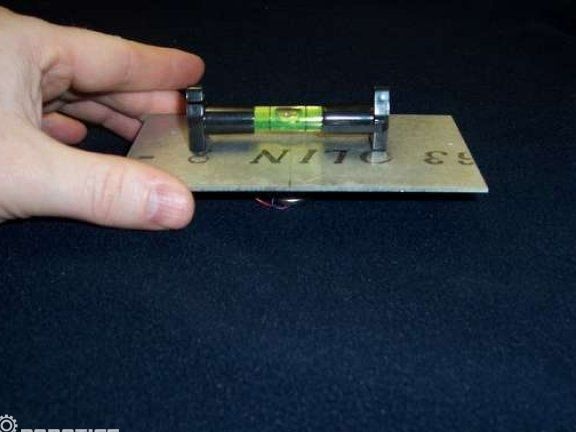
Agora, tudo o que resta é enfiar as pernas no robô. Para fazer isso, você precisa colocar a bateria sobre a mesa e, em cima dela, colocar as pernas do robô. Em seguida, as pernas precisam ser pressionadas; para isso, um nível linear ou peça de alumínio pode ser aplicada às pernas. Antes de aplicar cola, é aconselhável desengordurar a superfície da bateria com álcool. Não há necessidade de se arrepender da cola, pois ao trabalhar nas pernas, uma força suficientemente grande atua. Se você pisar muito nos pés, o robô poderá desmoronar durante a operação.
Não há necessidade de correr para executar o robô, a cola deve ser solidificada. O autor recomenda colocar a peça na geladeira, para que a cola seque mais rapidamente.


Isso é tudo, o robô está pronto e você pode conferir. Para ligar o robô, você precisa pegar um pedaço de fita isolante e prender o segundo fio do motor no terminal da bateria. Ao colocar o robô em uma mesa lisa, agora você pode observar o que ele fará.