
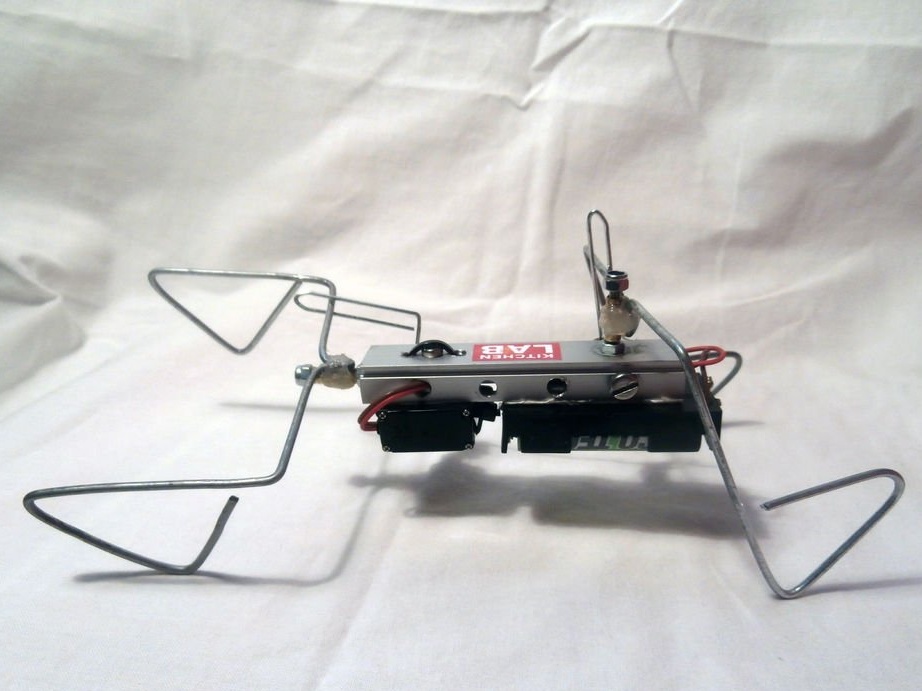
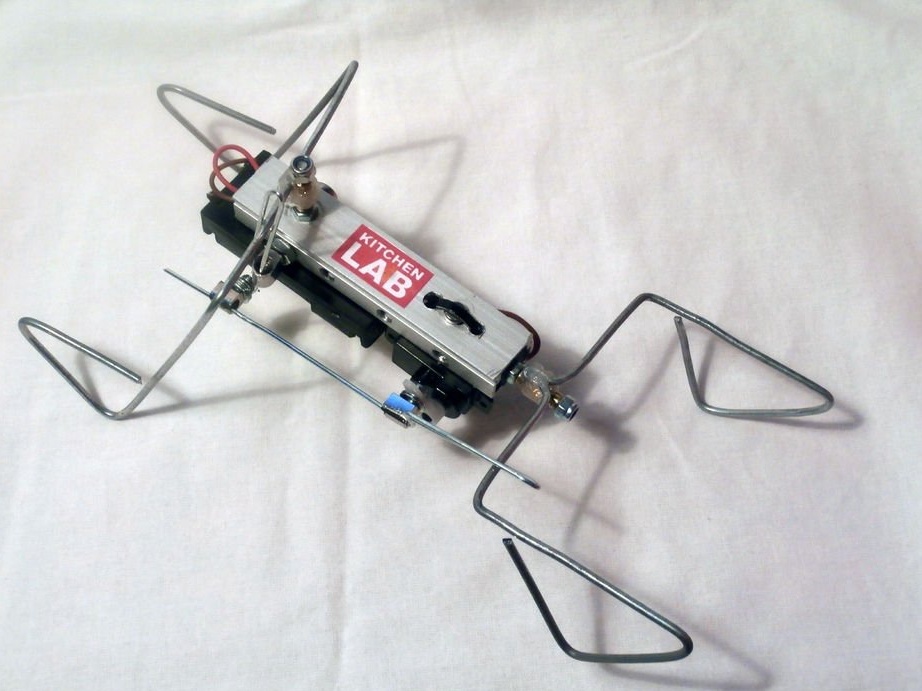
Olá pessoal! Fui inspirado a criar meu robô BEAM, tendo visto o suficiente dessas maravilhas de robótica monomotor e bimotor na Internet. A idéia era criar um robô ambulante, andando da mesma maneira que os caminhantes BEAM de 1 ou 2 motores. Após várias experiências malsucedidas, fiz o que queria!
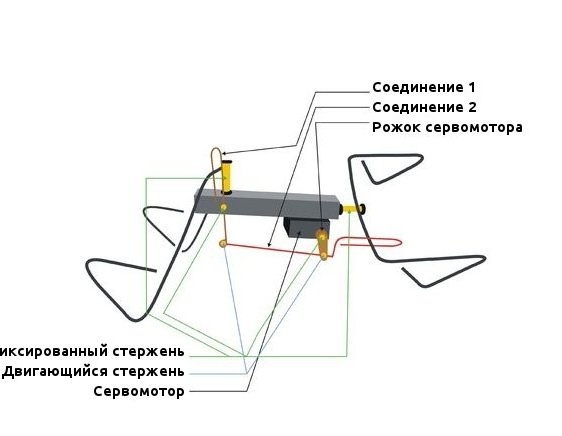
Etapa 1: O Mecanismo
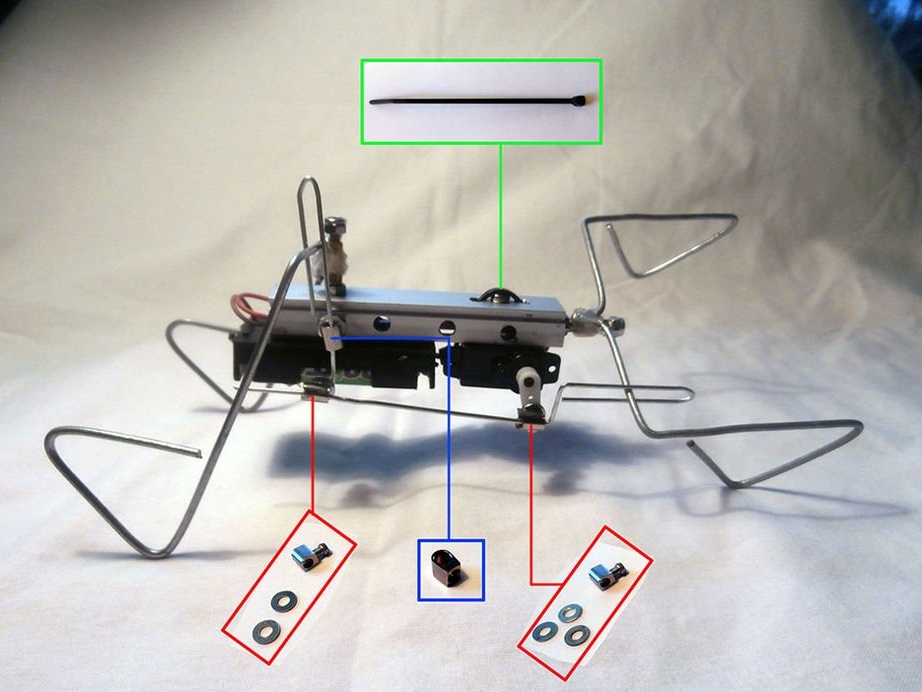
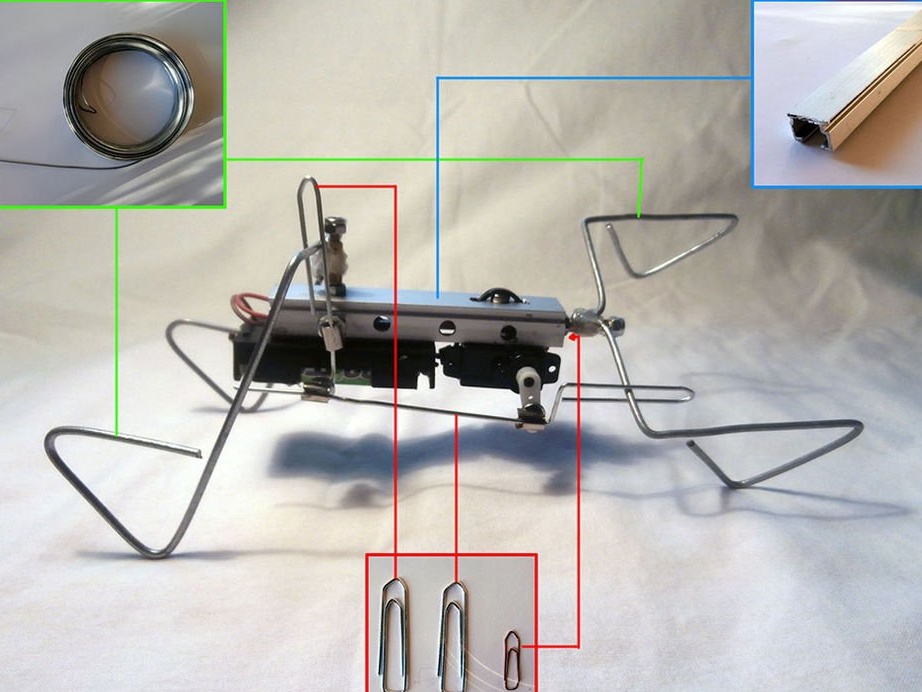
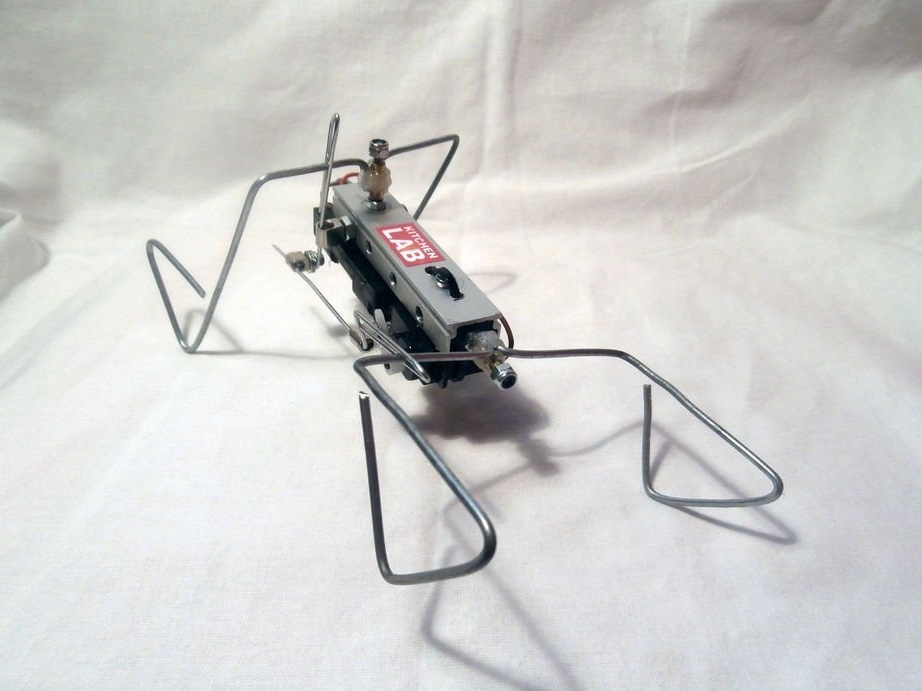
Etapa 2: Peças necessárias

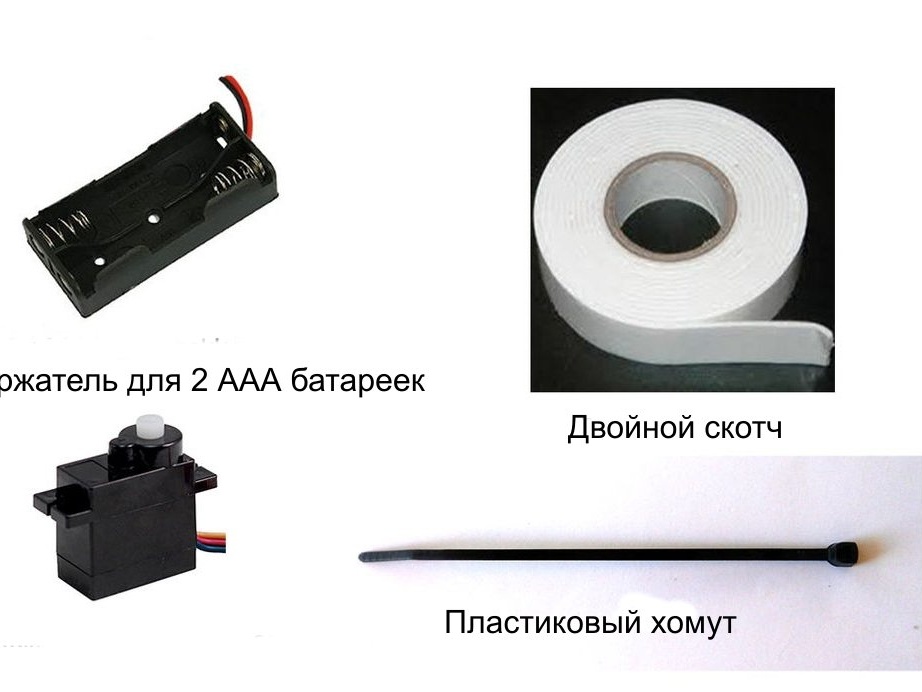



(1x) servo de rotação contínua
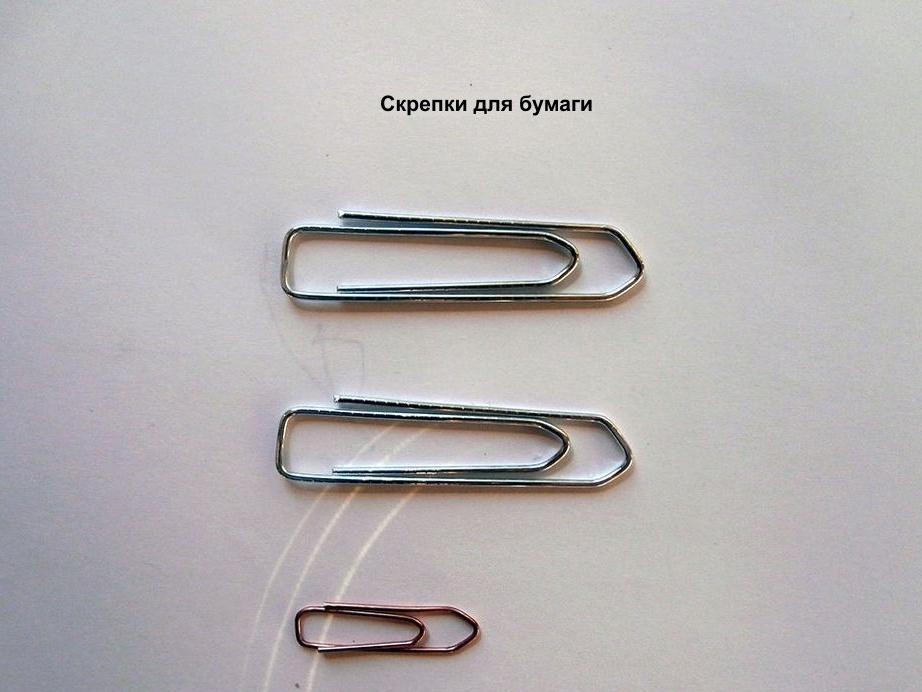
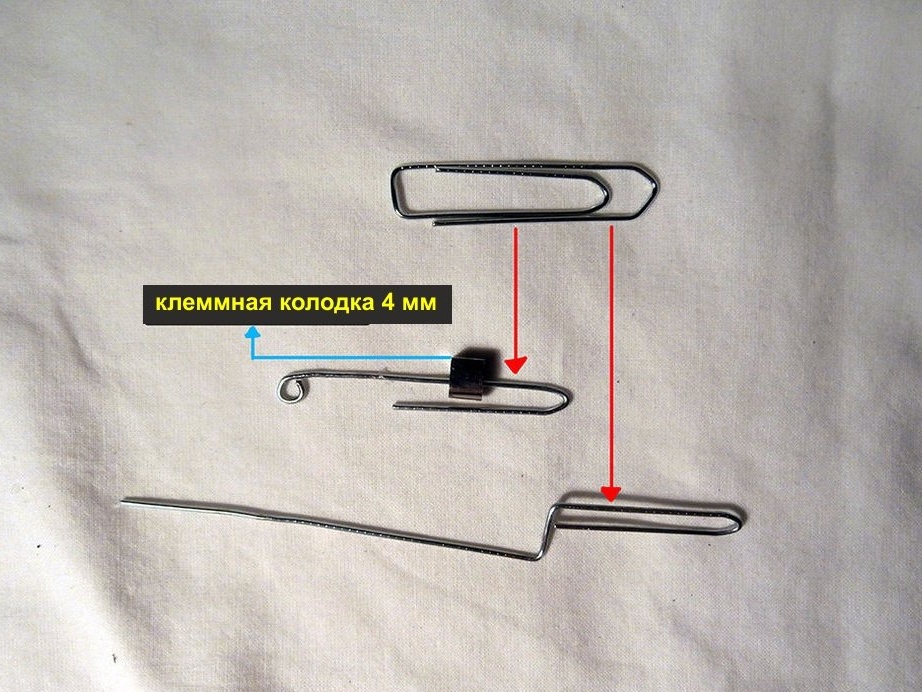
(2x) clipes de papel grandes
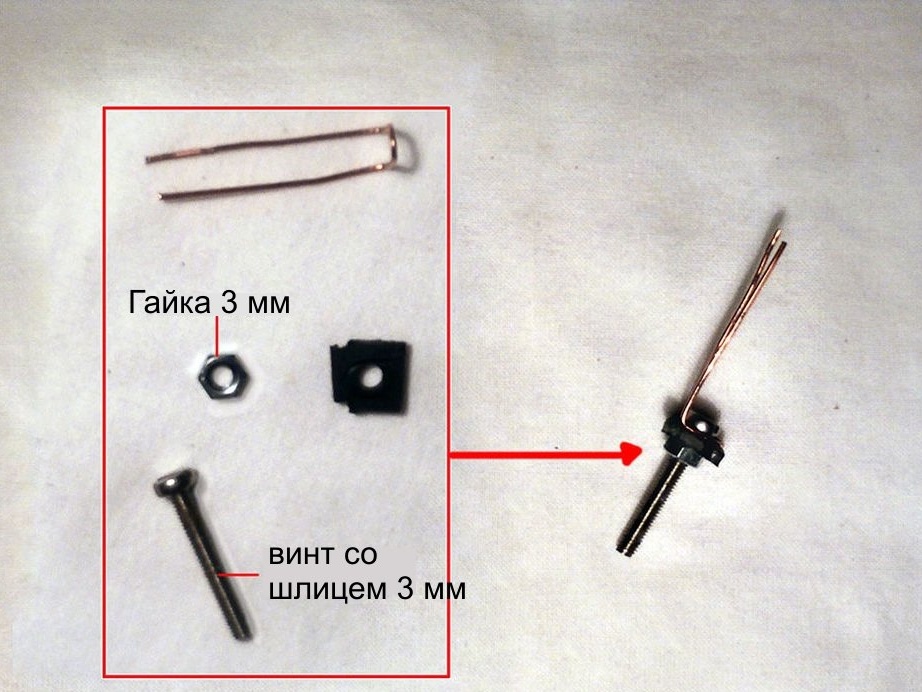
(1x) clipe de papel pequeno
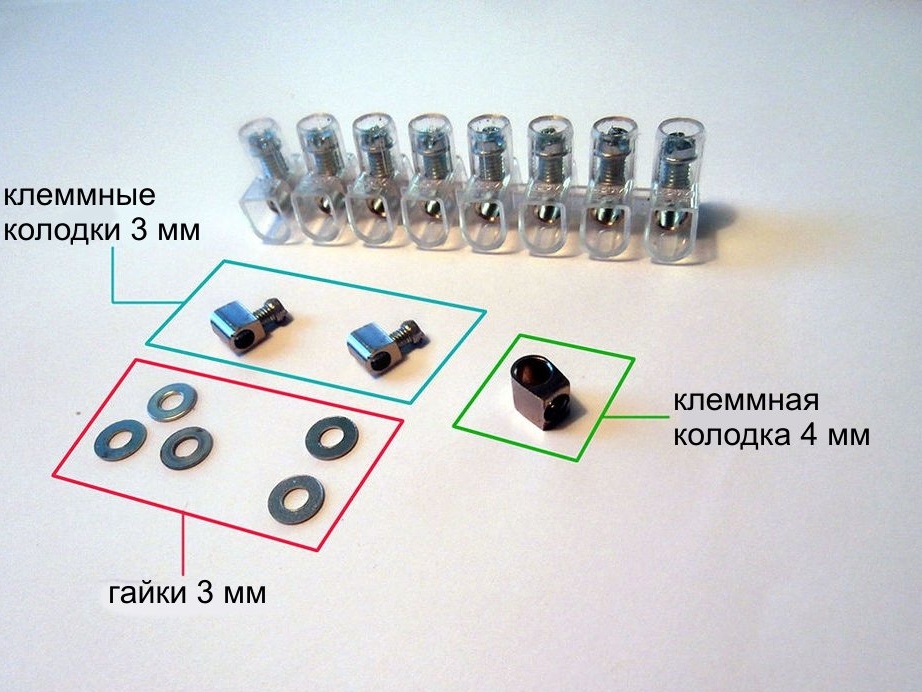
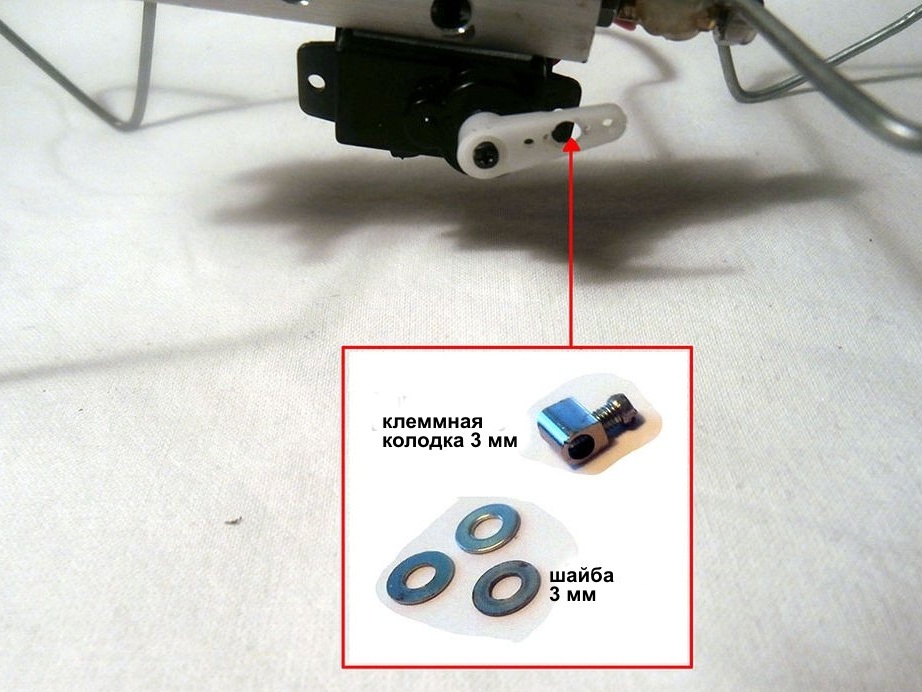
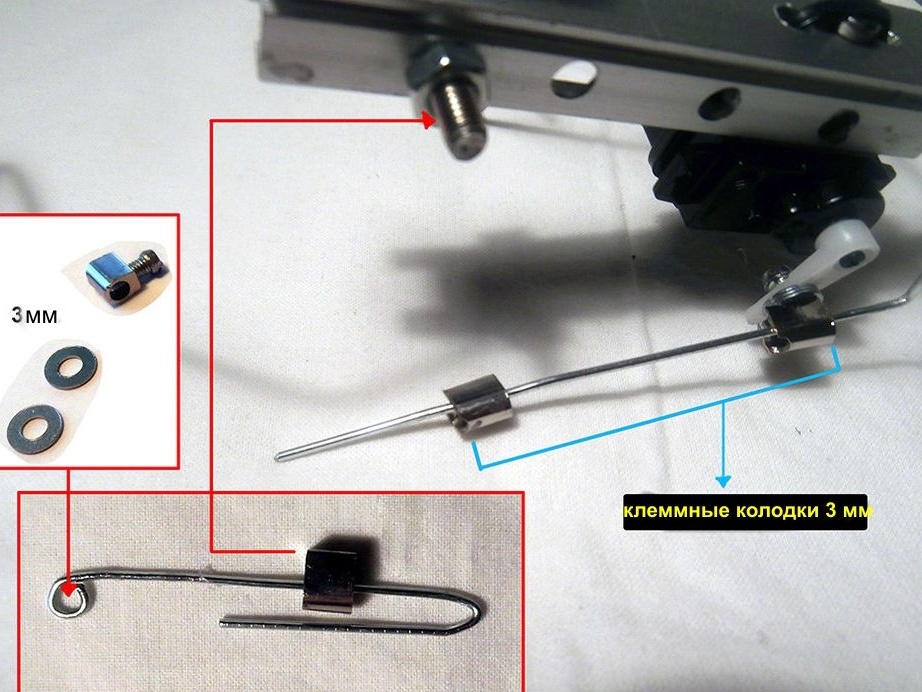
(2x) bornes (3mm)
(1x) bornes (4mm)
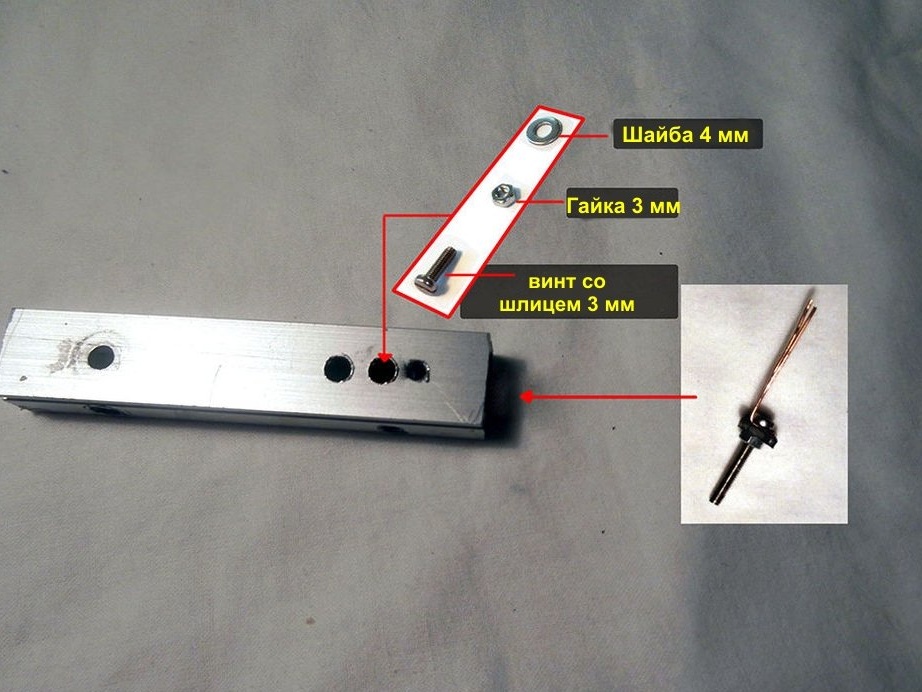
(1X) Bloco de perfil de alumínio usado
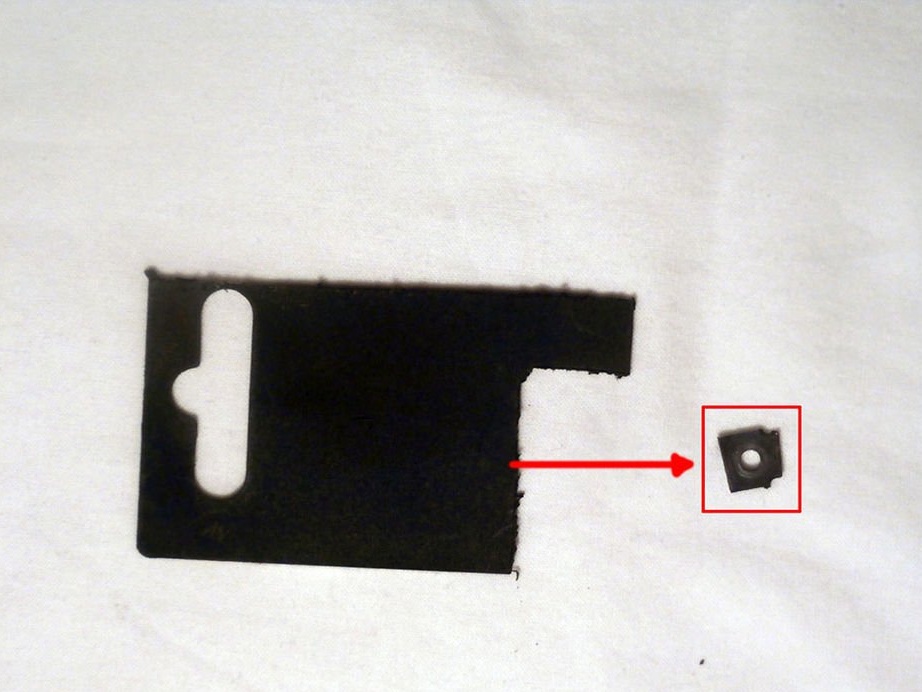
(1X) pedaço de plástico
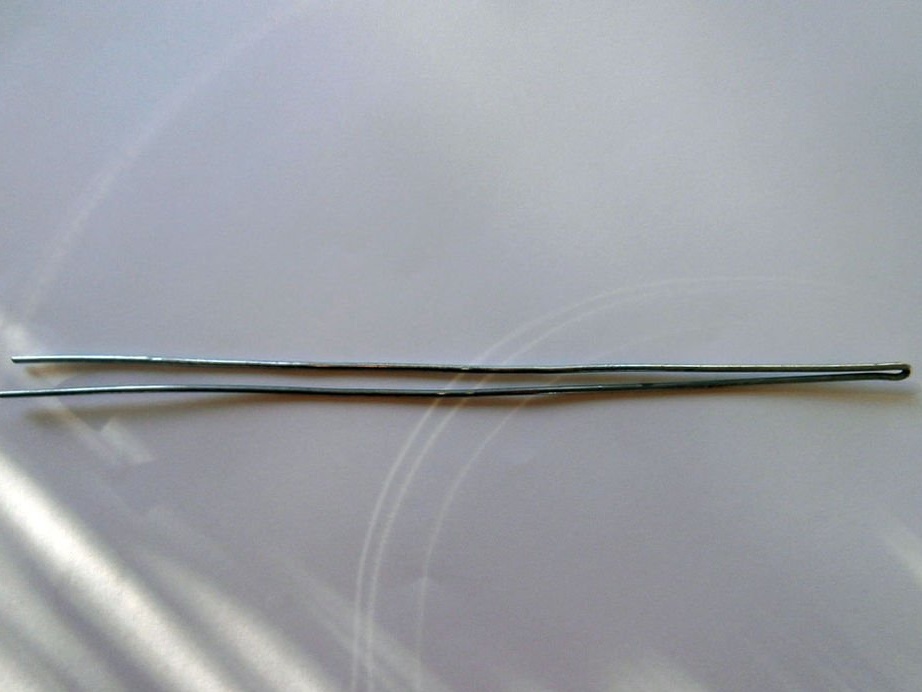
Fio de aço (2 mm)
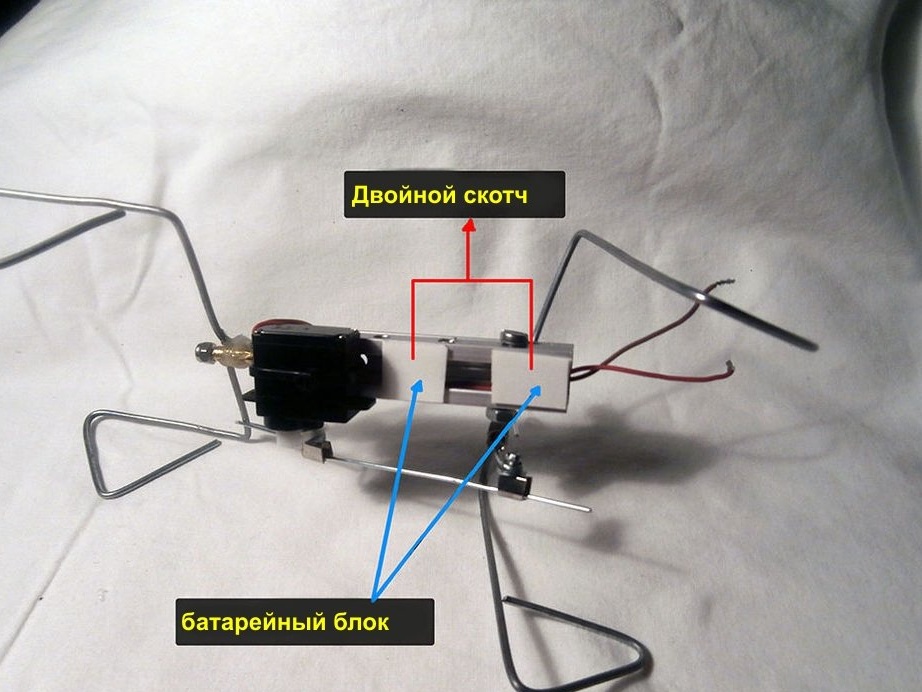
Fita adesiva dupla
Tubo de latão
(1X) braçadeira pequena
(1X) bateria (2 x AAA)
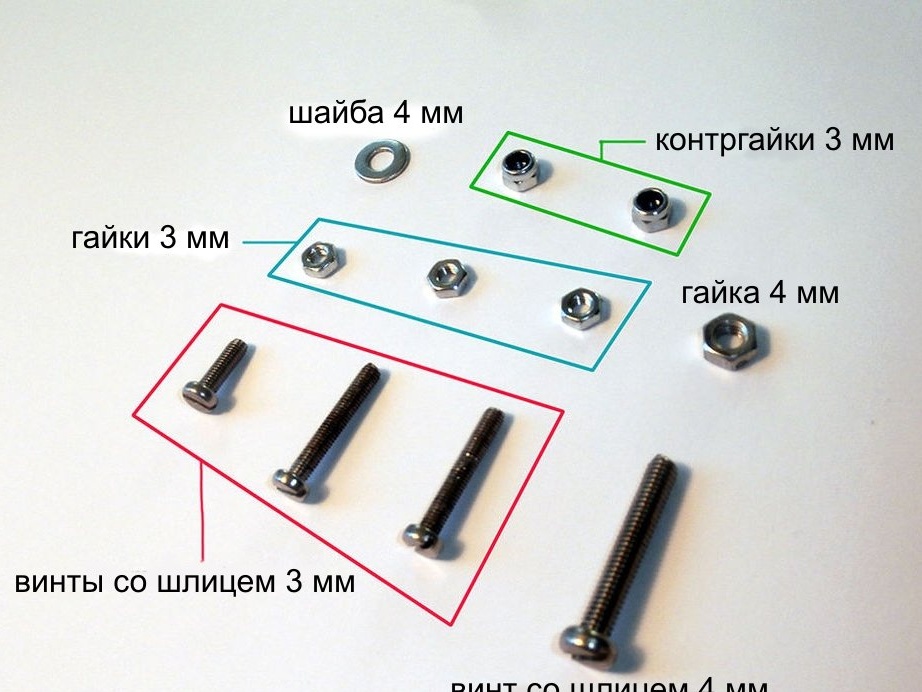
Porcas de fixação (2X) (3 mm)
(3X) porcas e parafusos (3 mm)
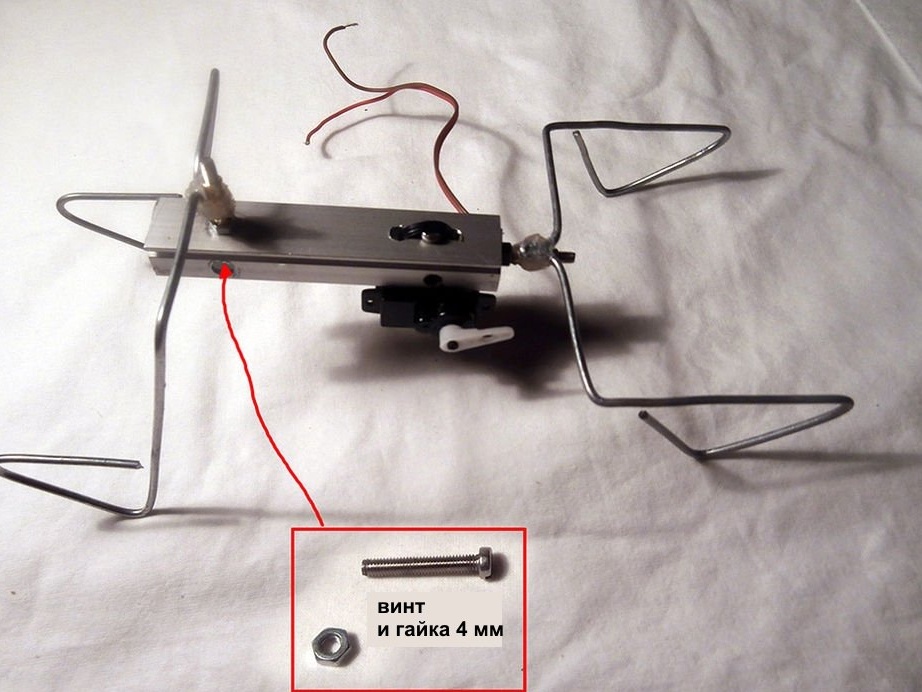
(1x) porcas e parafusos (4 mm)
Arruela (5x) (3mm)
Arruela (1X) (4mm)
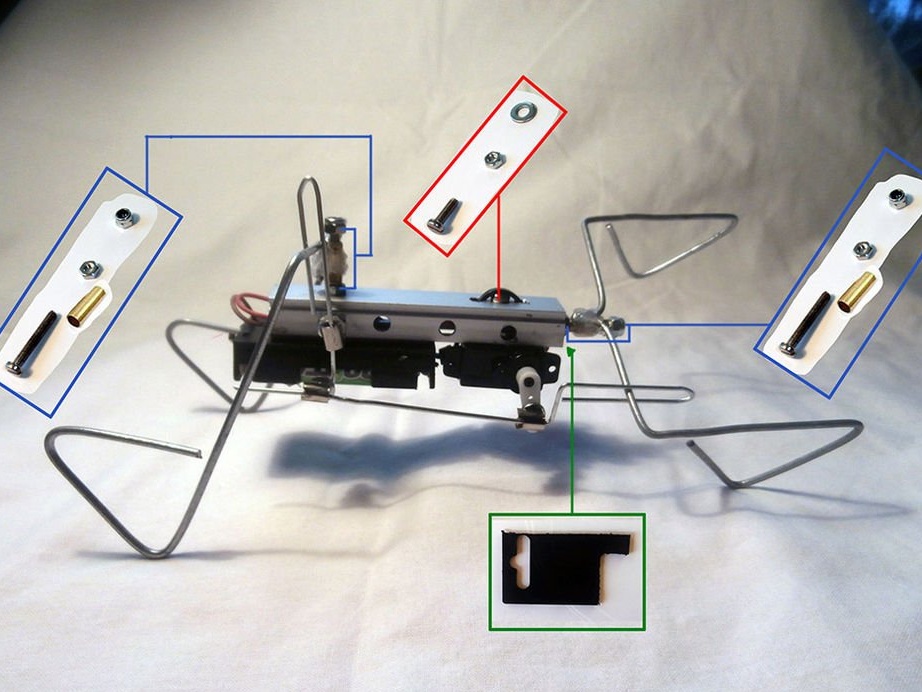
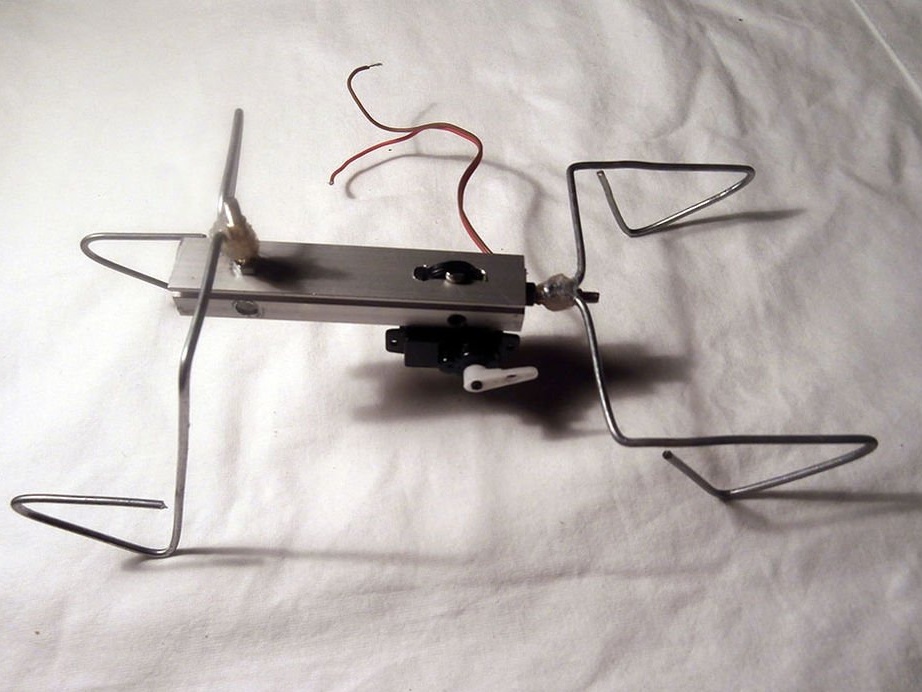
Etapa 3: Montagem de peças
Etapa 4: Ferramentas
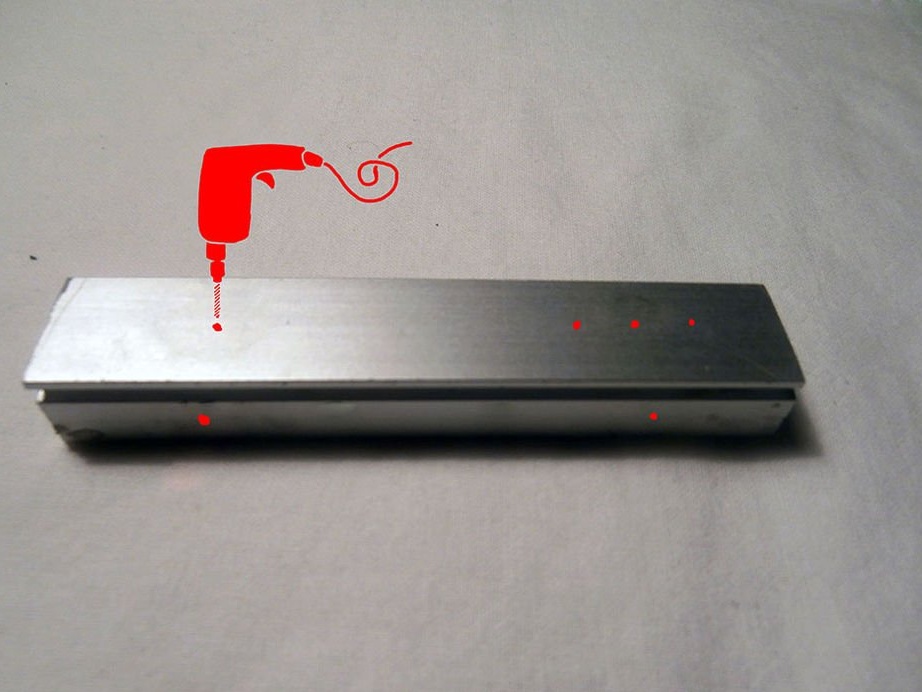
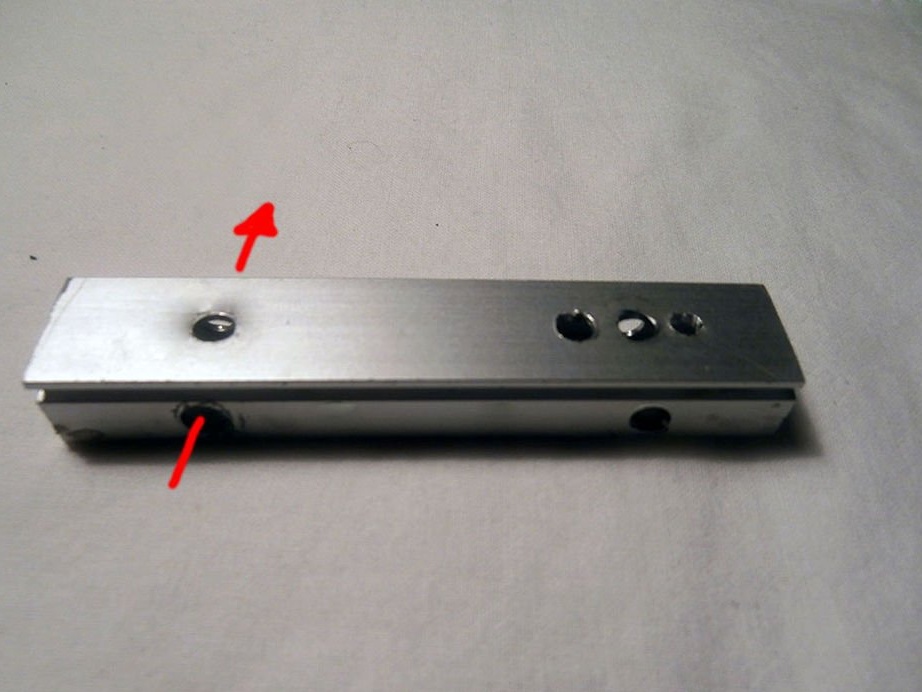
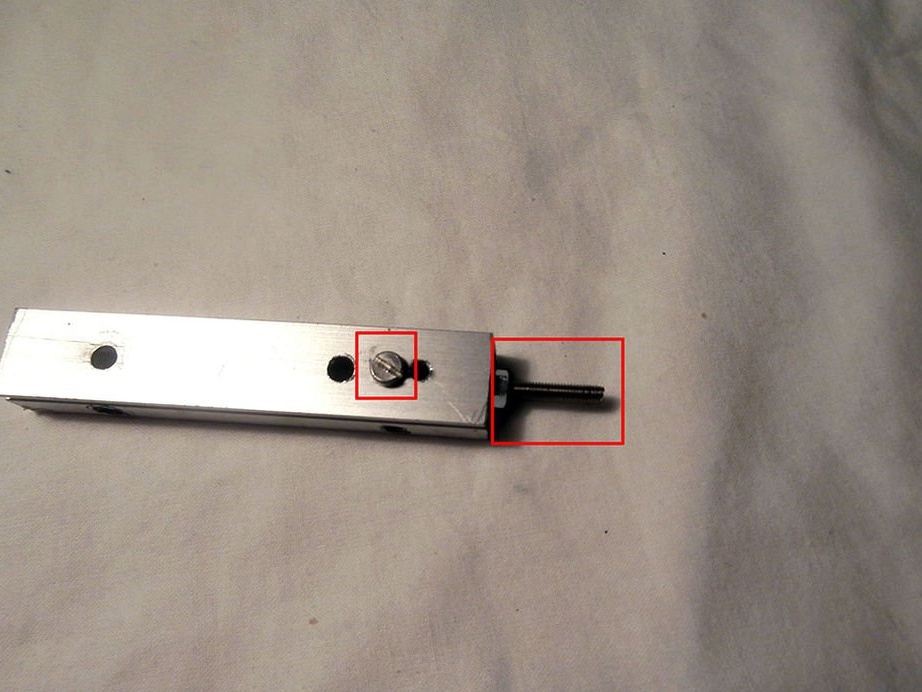
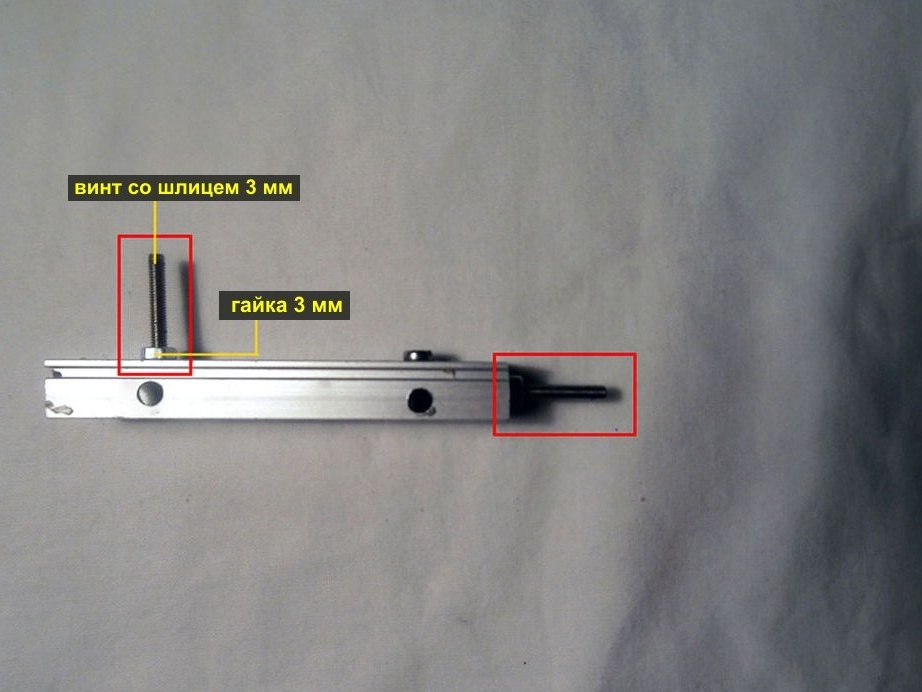
Etapa 5: Habitação

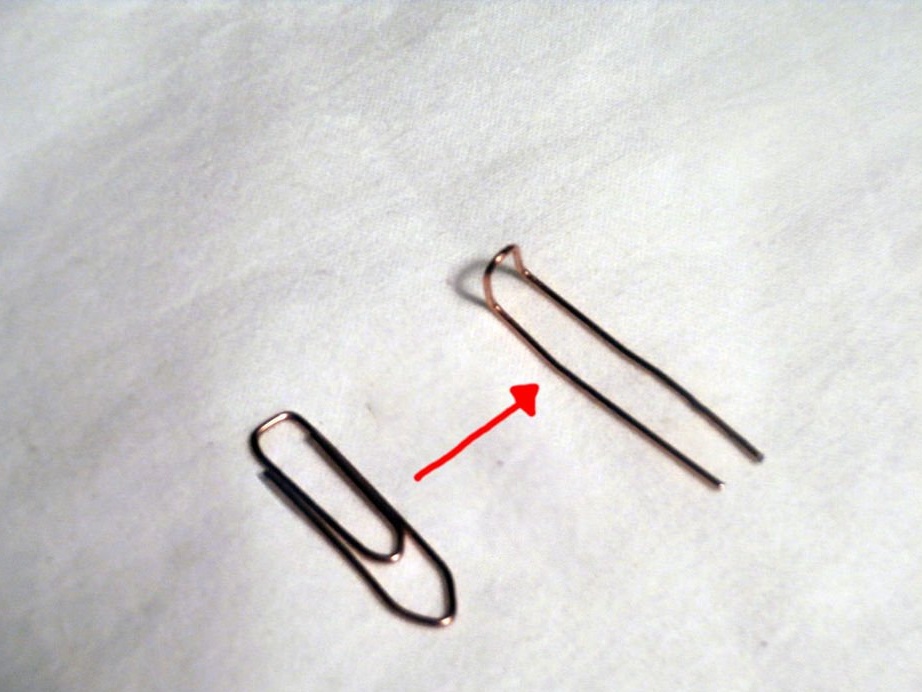

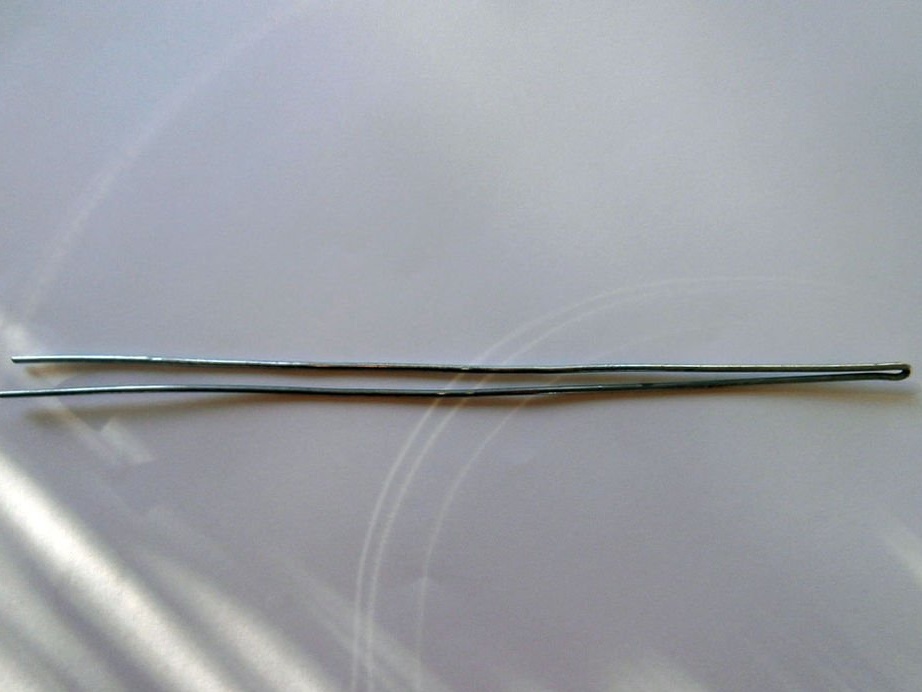
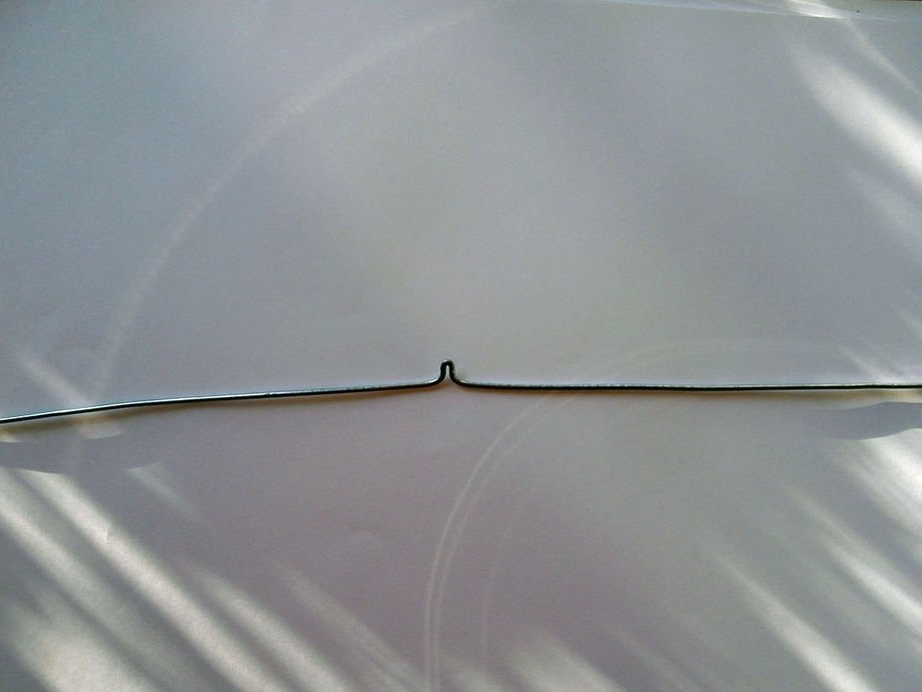
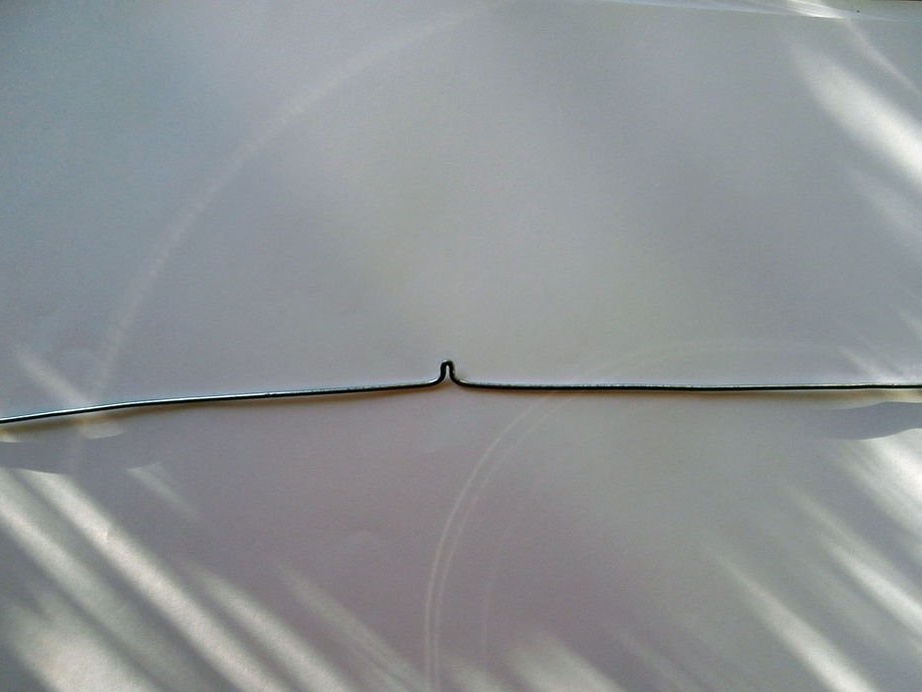
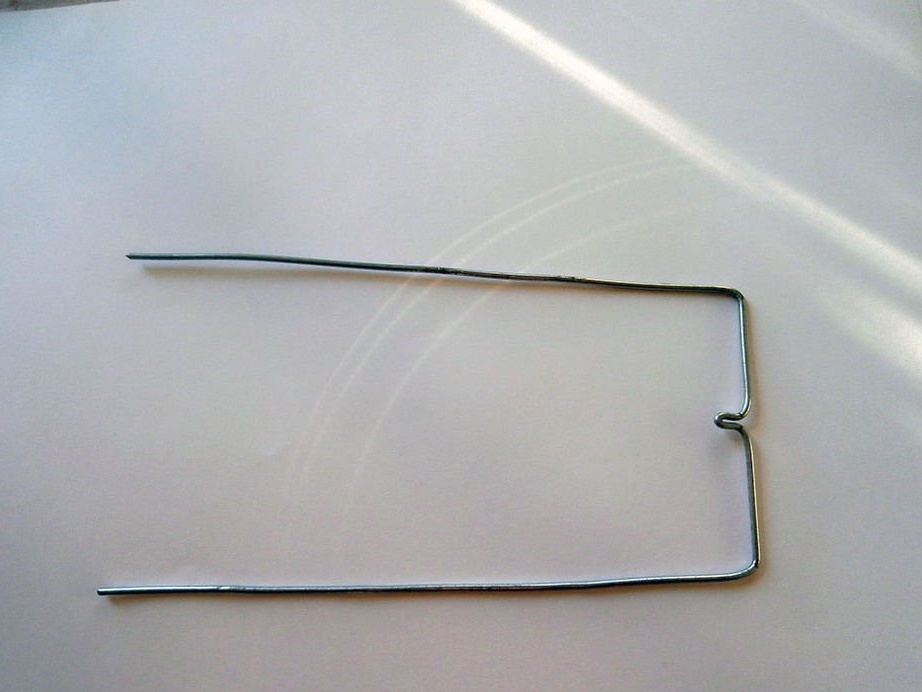
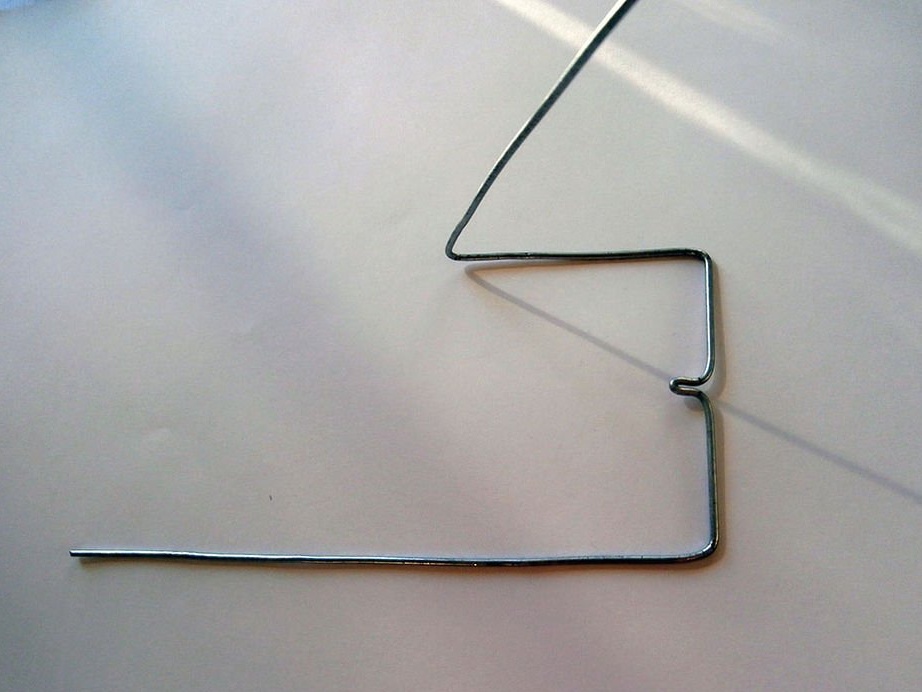
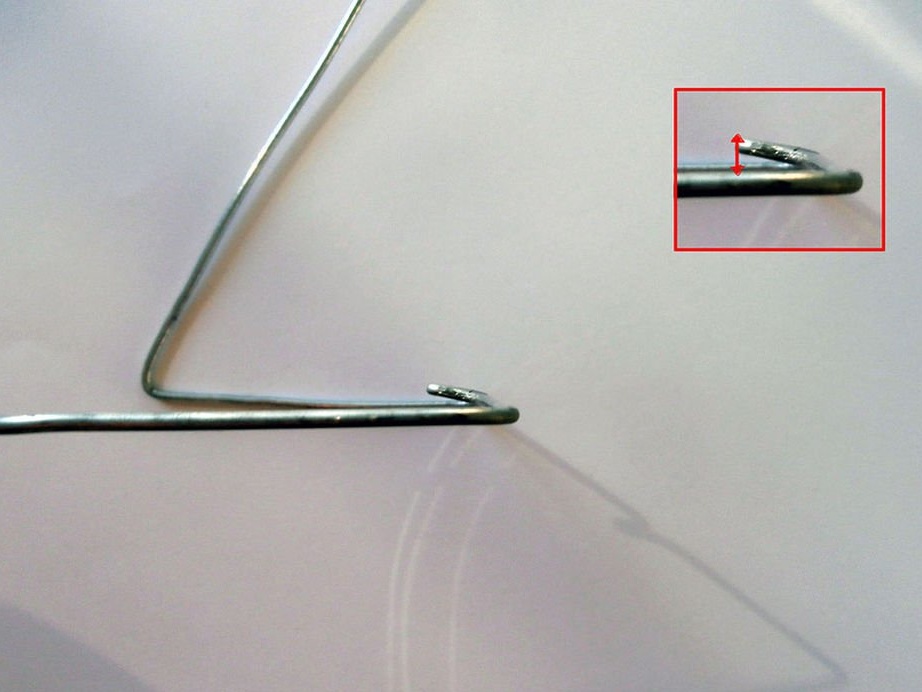
Etapa 6: pernas dianteiras
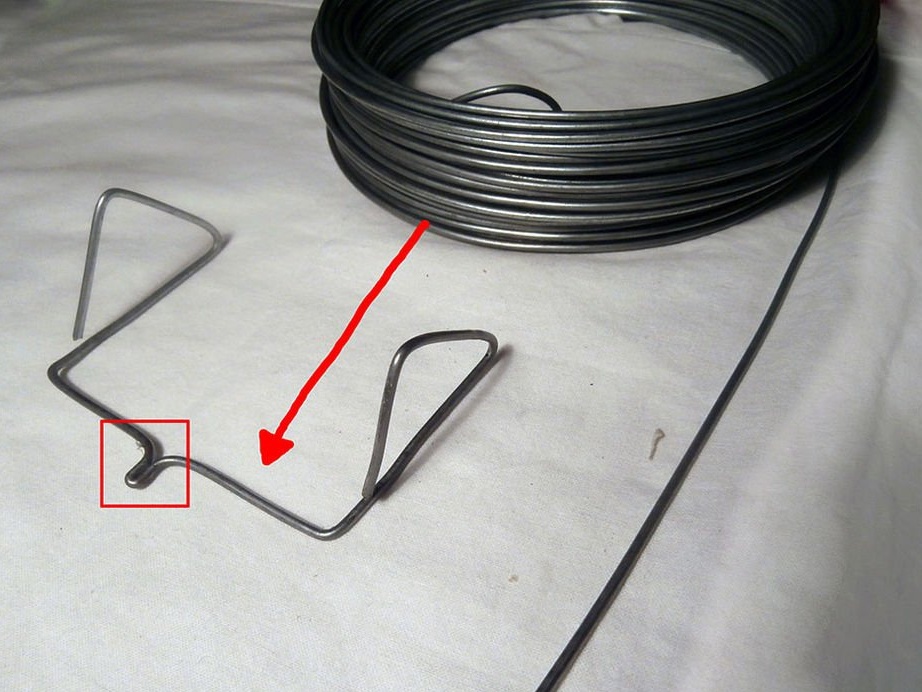
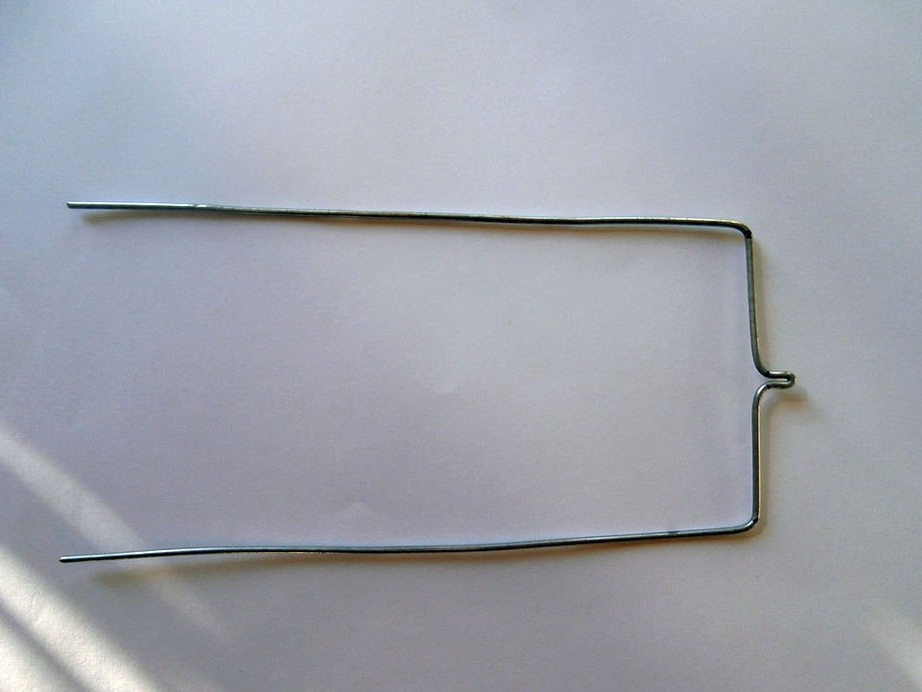
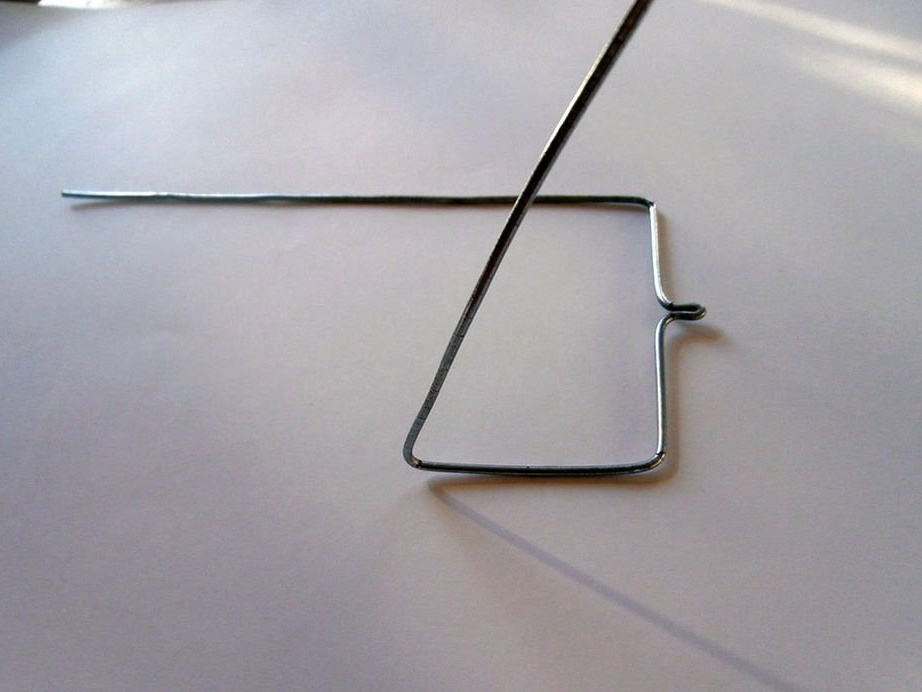
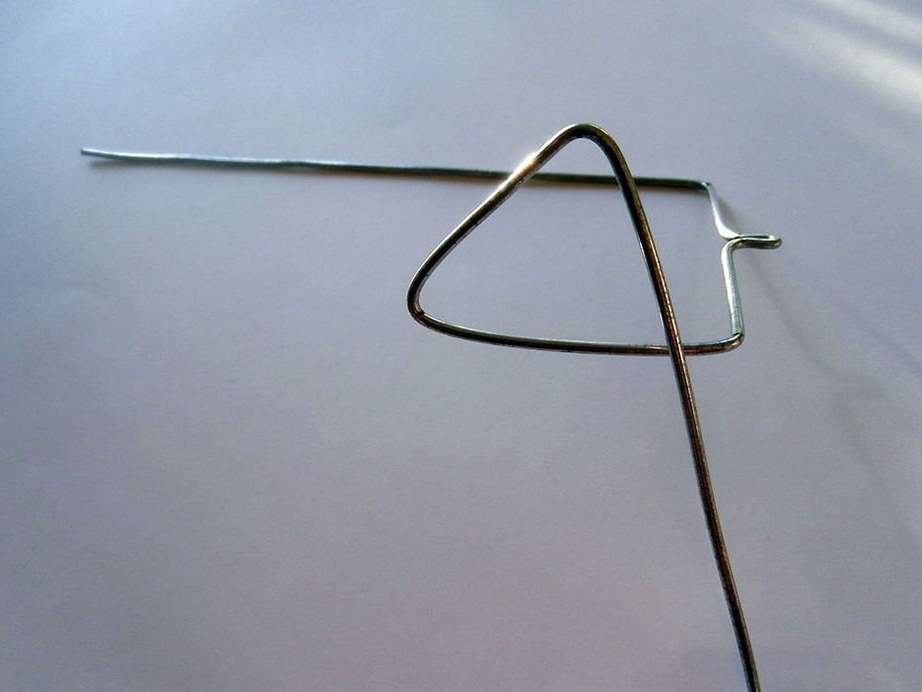
Etapa 7: pernas traseiras
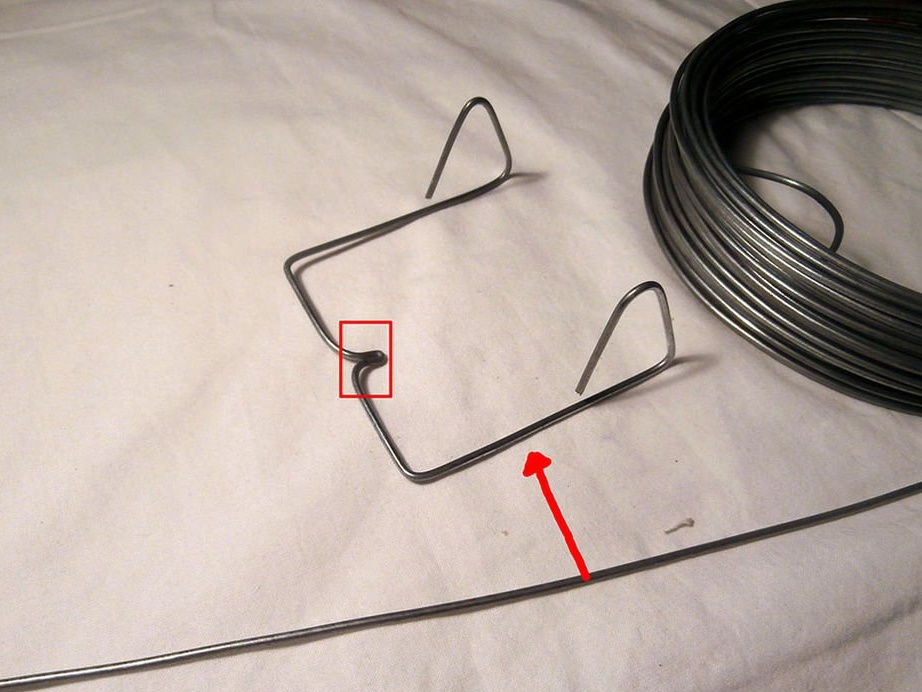
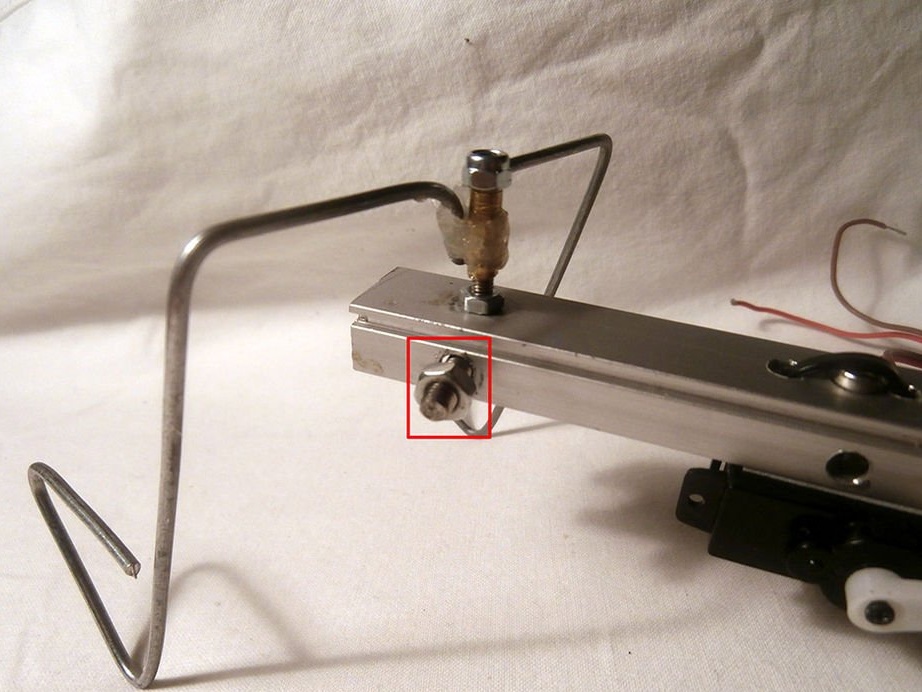
Etapa 8: Anexando os pés
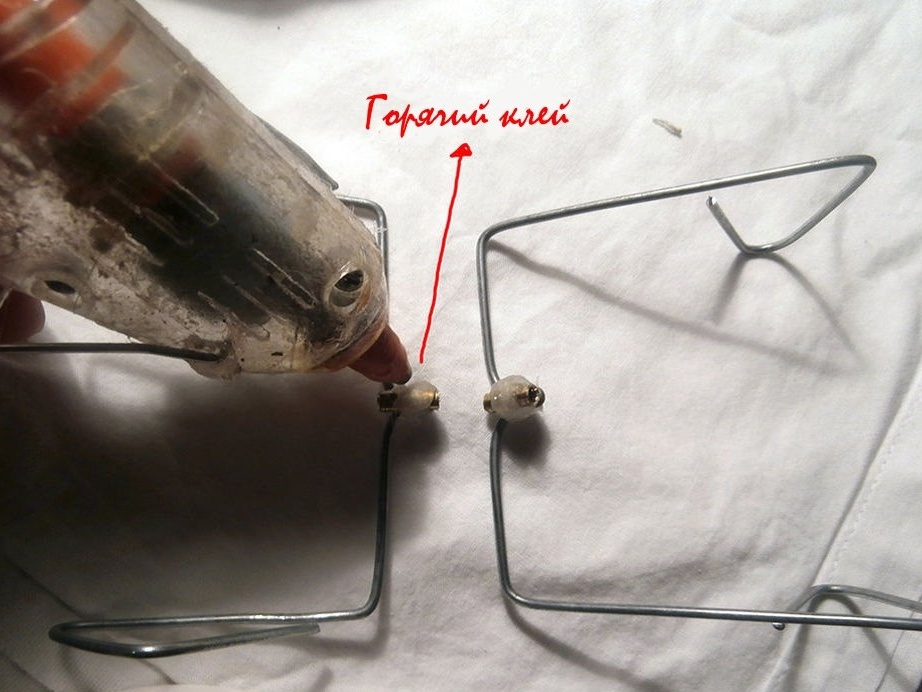
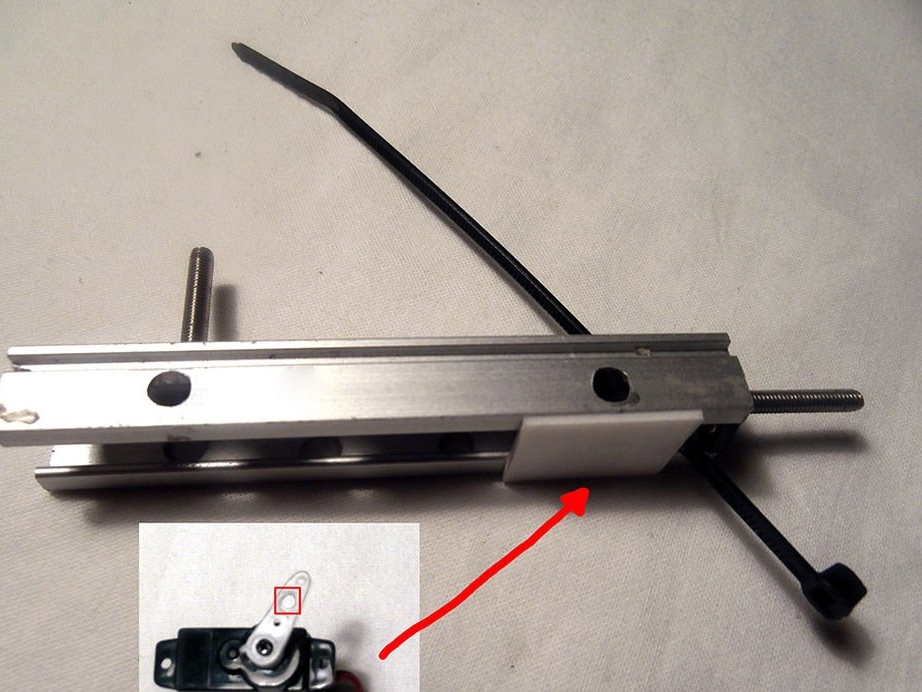
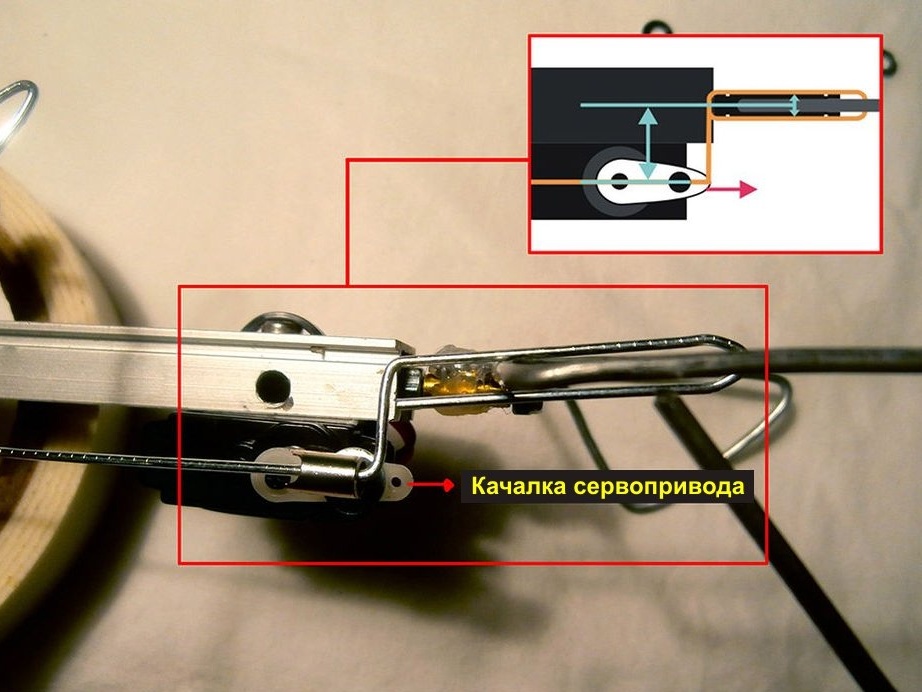
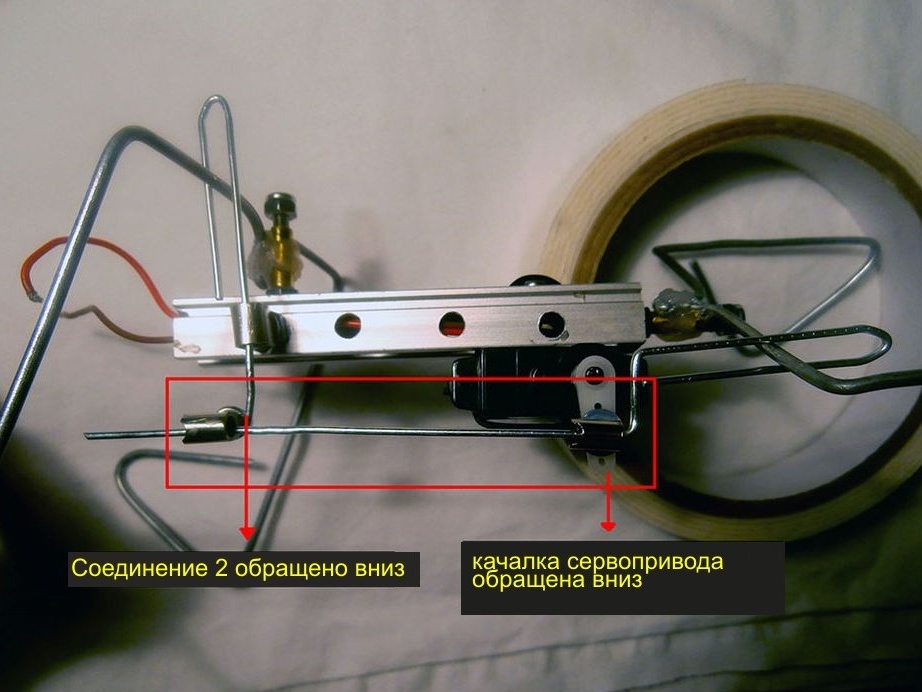
Etapa 9: Embreagem
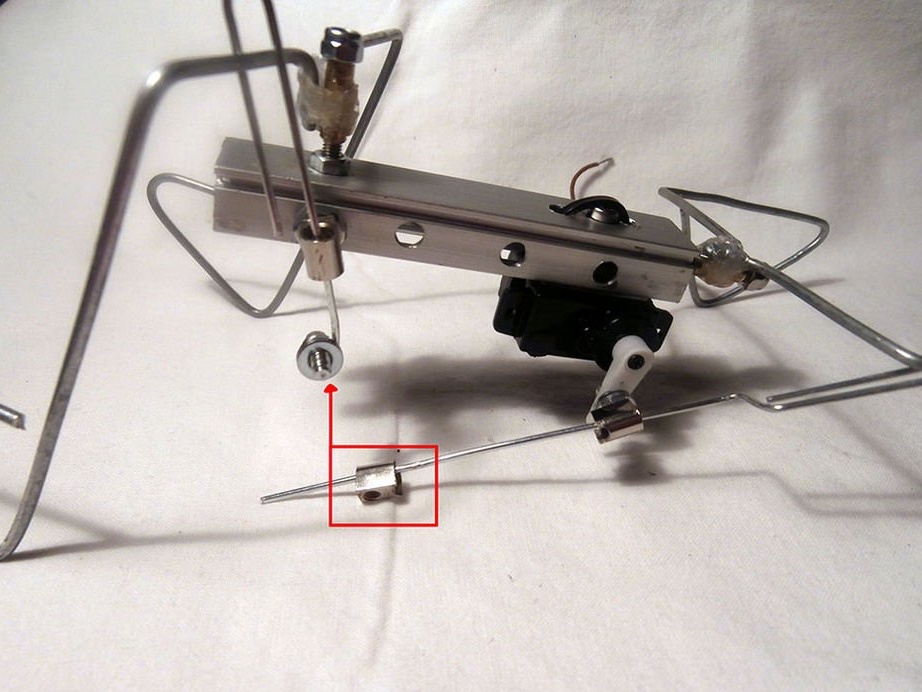
Etapa 10: montagem da embreagem
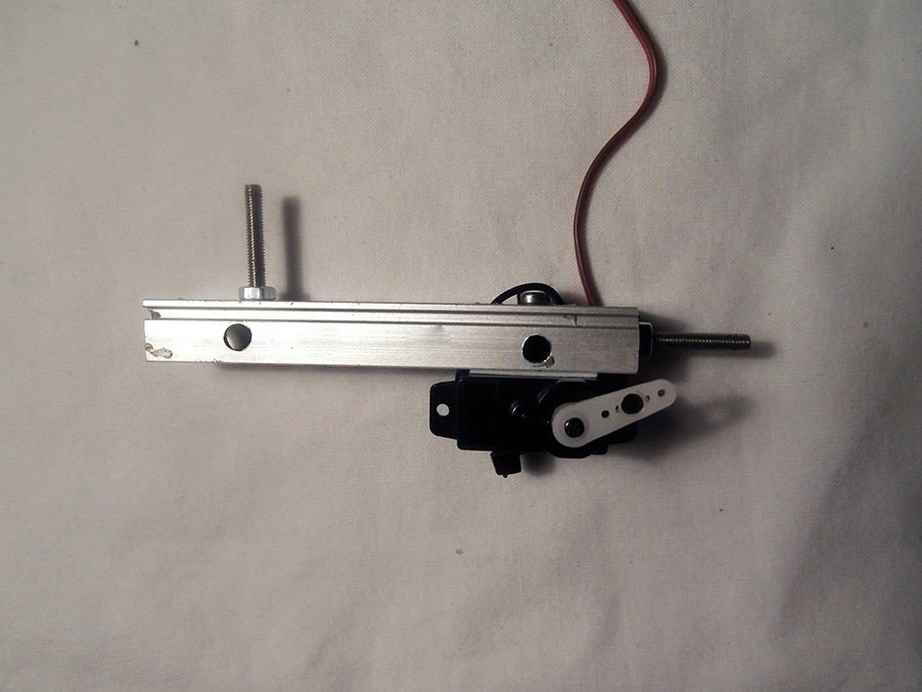
Etapa 11: os retoques finais
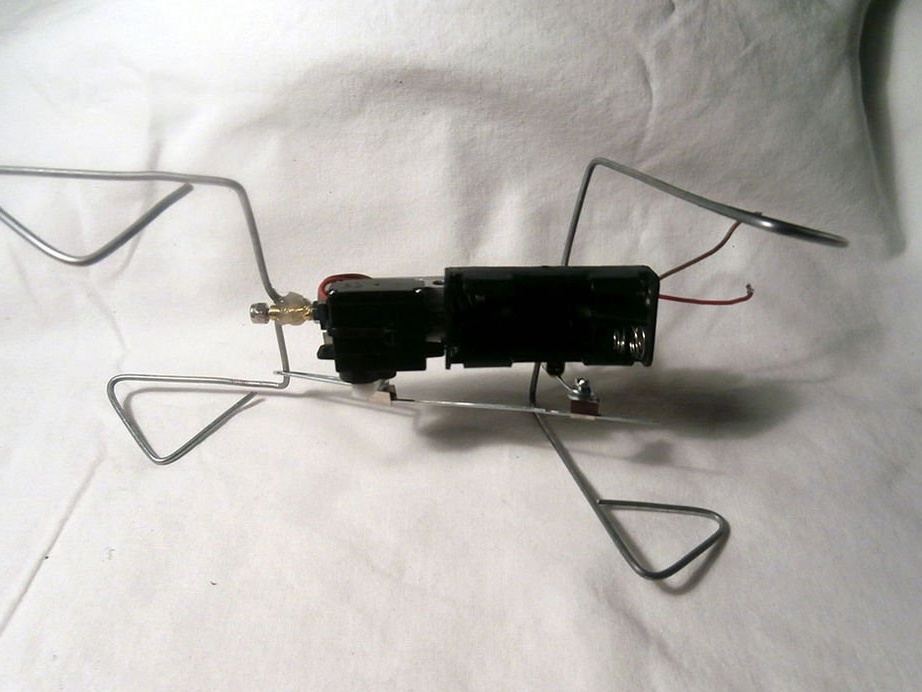
No final, basta conectar o servo e as baterias e o robô Owl iniciará uma jornada pela sua casa :)