
Recentemente, construí dezenas de robôs, principalmente inspirados nas maravilhas da robótica BEAM. Se você não conhece essa tecnologia, o BEAM é um método especial para a construção de robôs com ênfase em B - biologia, E - eletrônica (eletrônica), estética estética (estética) e M - mecânica (mecânica). Este é o acrônimo BEAM. O que separa essa tecnologia de outras abordagens é o uso de energia de radiação apenas para nutrição (principalmente energia solar), o descarte de vários materiais (reutilização) e o minimalismo. Embora eu tenha adotado esses princípios, meus próprios robôs não estavam exatamente no espírito do BEAM (eles eram alimentados por uma bateria).
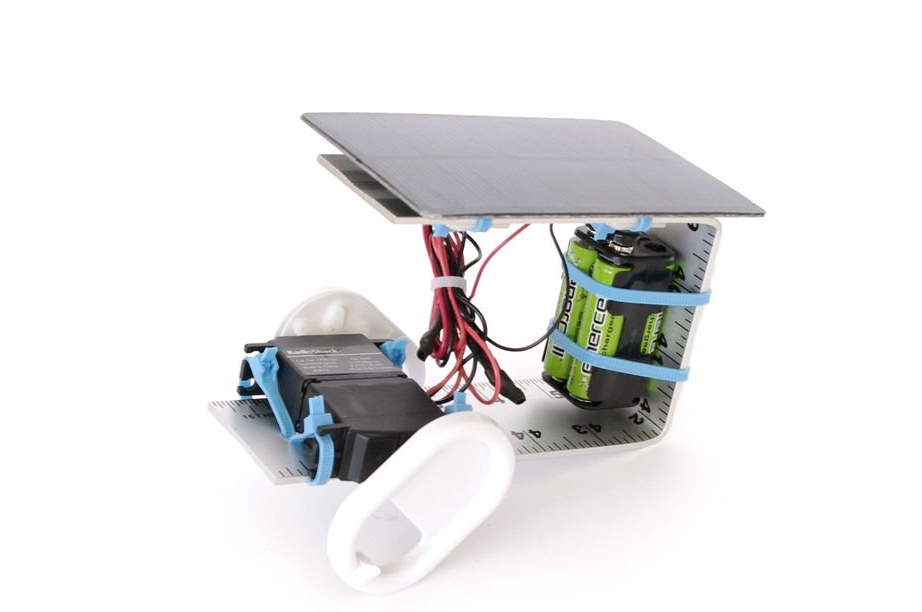
Como a robótica BEAM me inspirou seriamente, eu queria fazer um robô movido a energia solar. Mas, em vez de apenas criar um robô BEAM, decidi integrar um painel solar ao robô do meu estilo usual. Em vez de ser totalmente alimentado pelo sol, decidi construir baterias recarregáveis. Ou seja, meu robô pode ser alimentado por uma bateria ou por um painel solar, dependendo da fonte de energia atualmente mais potente. O painel solar também carrega as baterias quando a luz solar o atinge. Isso permite que o robô se mova tanto na luz quanto na sombra.
Eu acho que essa abordagem combina com sucesso dois estilos, e esse é um experimento interessante na construção de robôs.
Etapa 1: Materiais
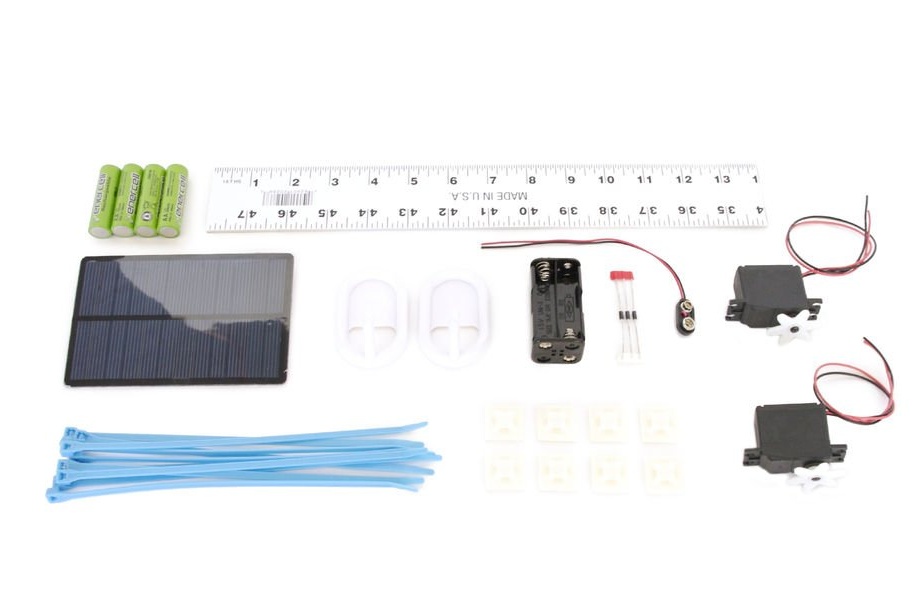
Você precisará de:
(x1) Painel solar
(x2) Servomotores padrão
x3) Diodos Schottky 1N5817 - equivalente a NTE578
(x1) bateria de 9V
(x8) Pilhas AA recarregáveis
(x1) 8 x bateria AA
(x12) Base para grampos
(x1) Régua (30 - 50 cm)
(x2) Ganchos adesivos de parede
(x1) Grampos de plástico
(x1) Tubulação termo-retrátil
Etapa 2: Modificar o Servo

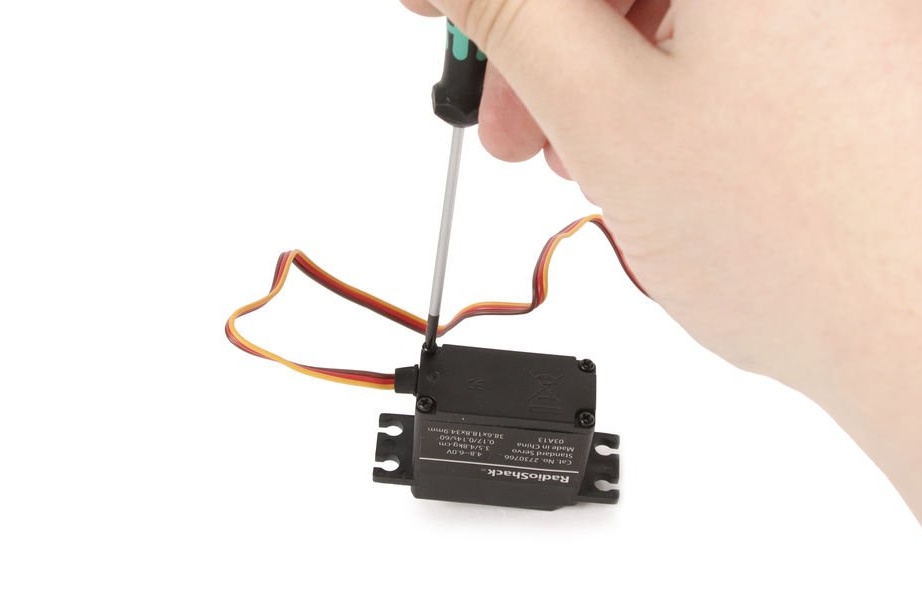
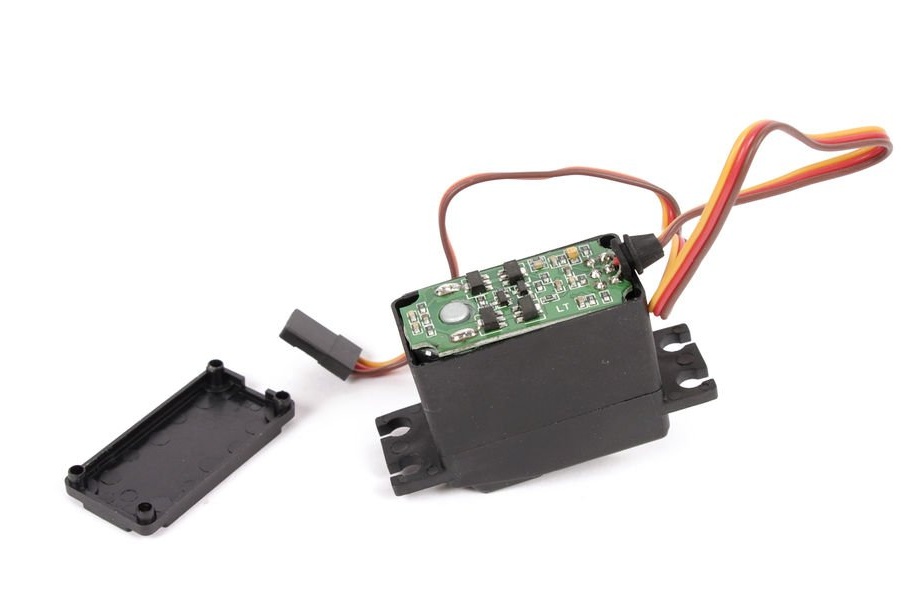
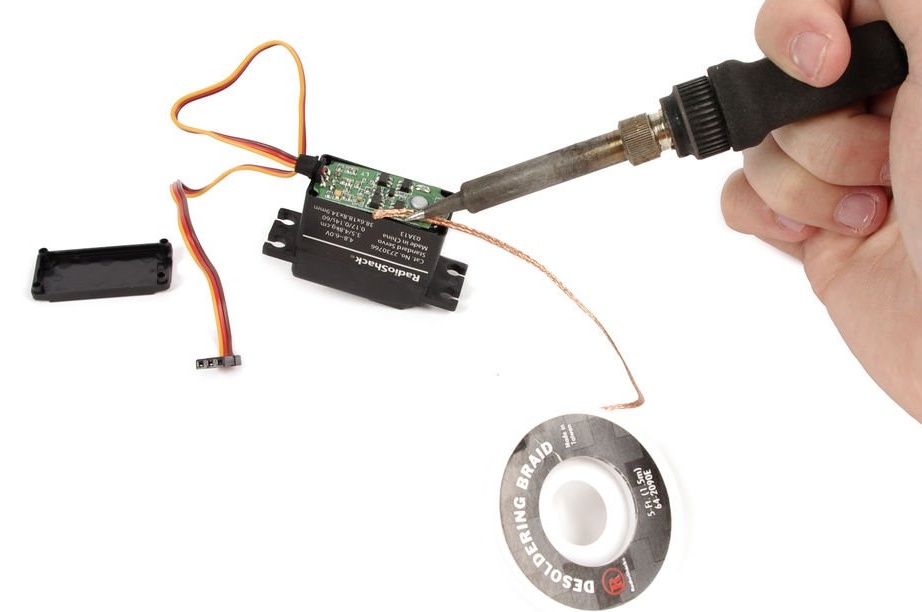
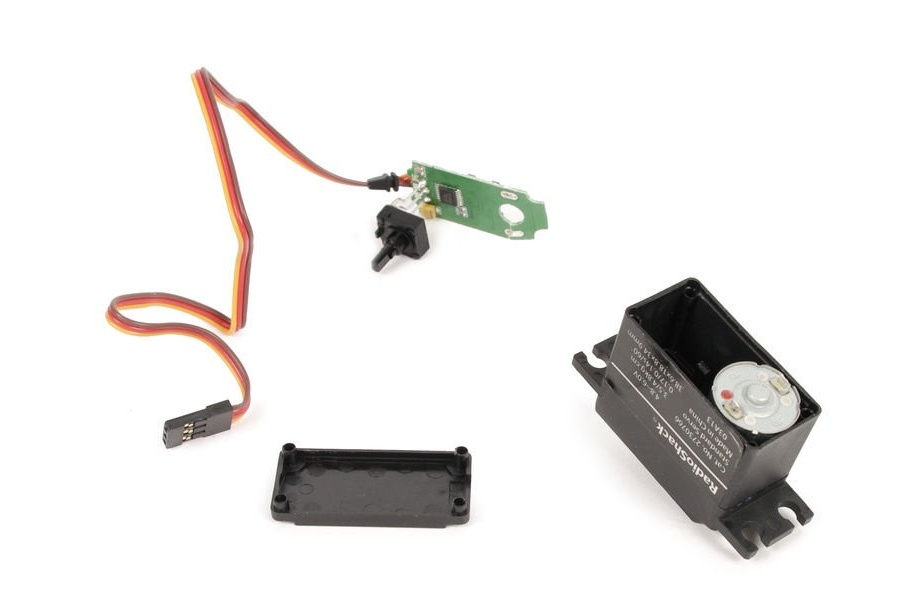




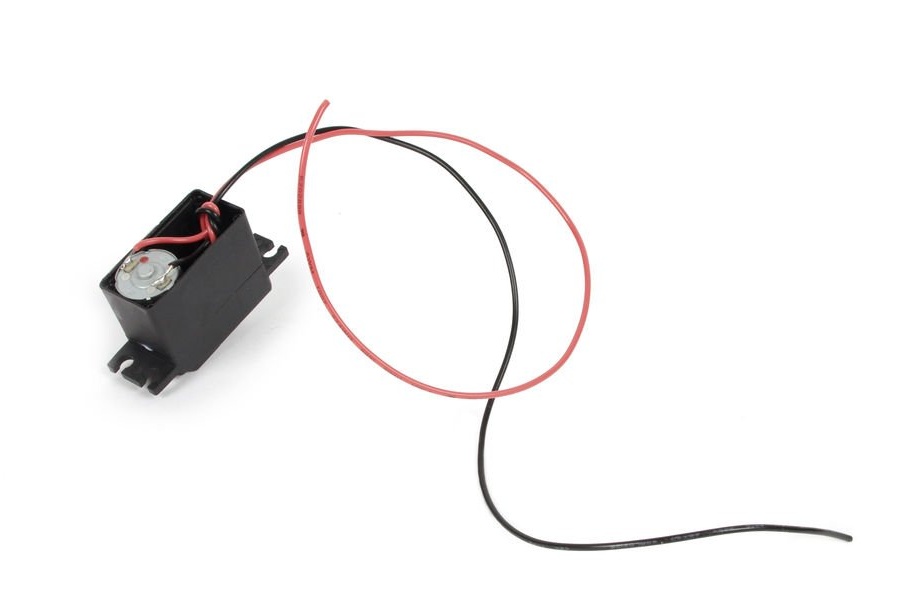
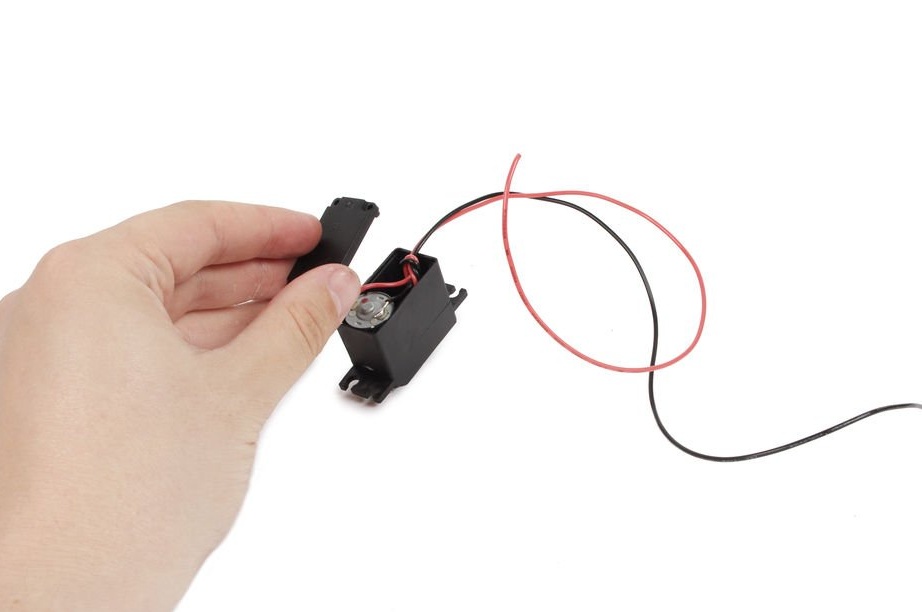

Abra a caixa do servo, desaparafusando os 4 parafusos no painel inferior. Descompacte a placa interna e conecte a fiação vermelha e preta a cada terminal da unidade.
Abra a engrenagem e encontre a engrenagem com uma pequena tampa de plástico que impeça a rotação contínua. Corte a tampa da engrenagem.
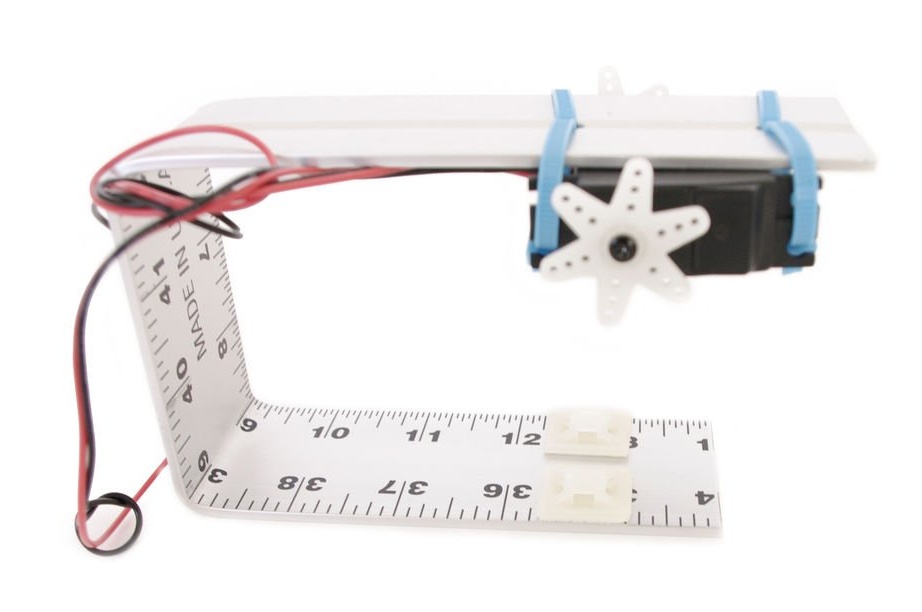
Etapa 3: Perfurar
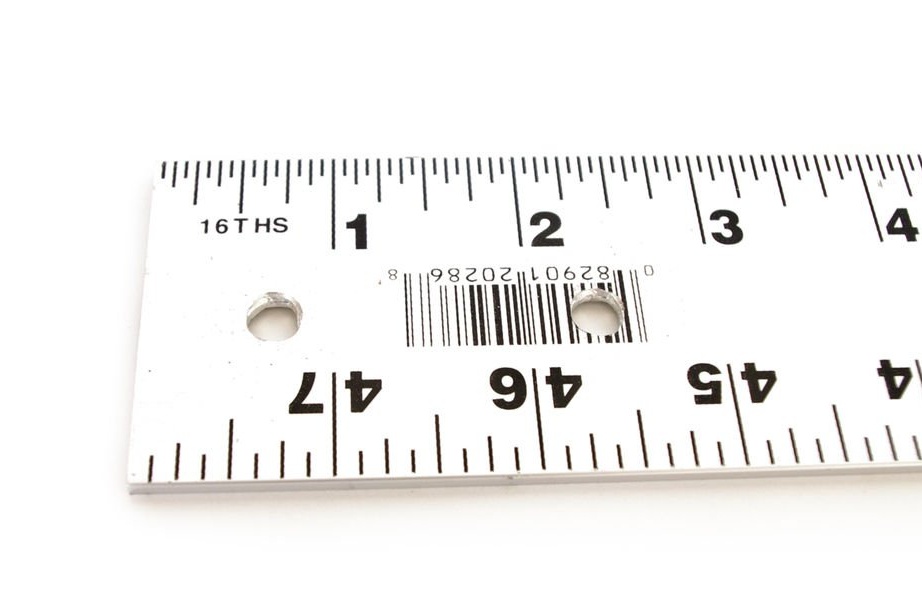


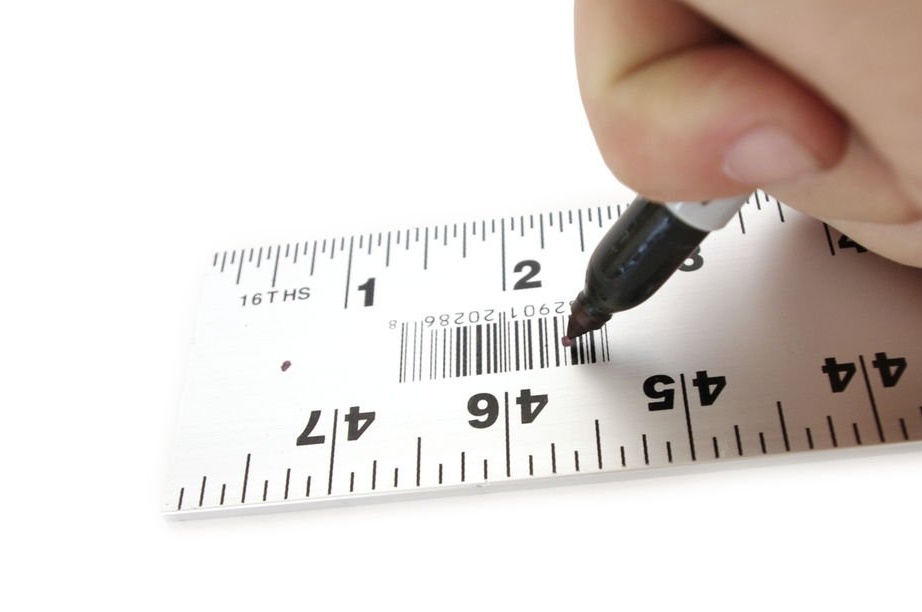
Faça um orifício de 6,3 mm no meio da régua, a cerca de 15 mm da borda curta. Faça um segundo orifício a cerca de 60 mm da mesma borda.
Etapa 4: dobrar

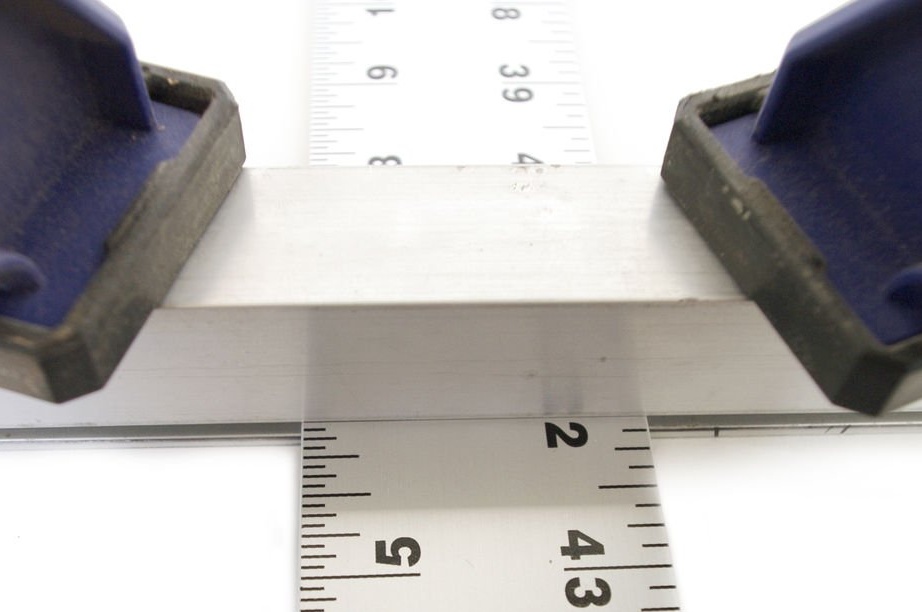
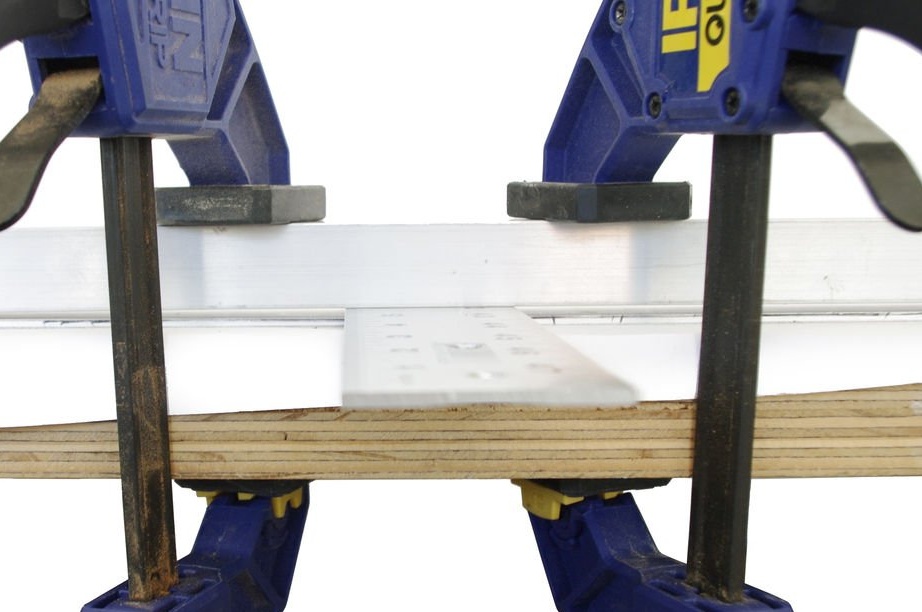

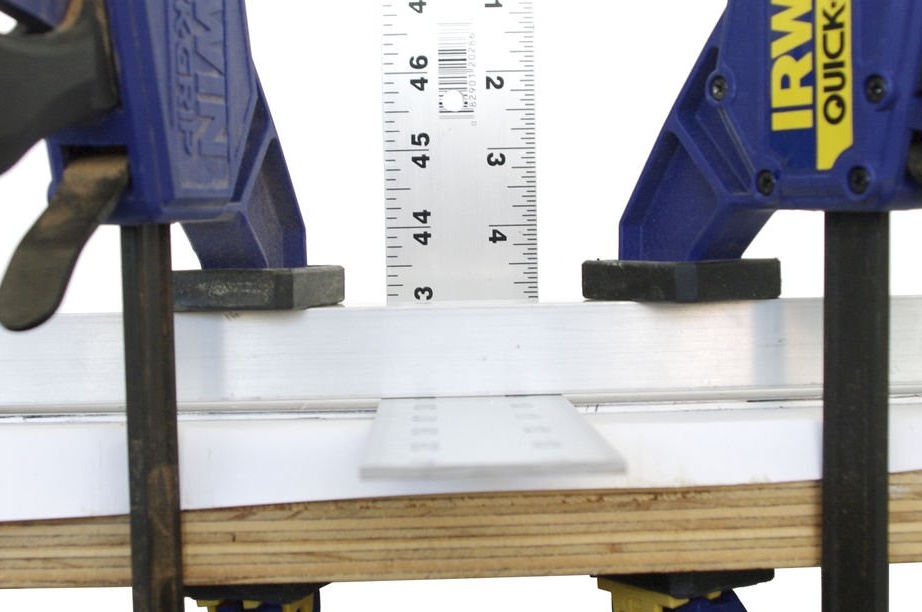

Usando um torno ou duas placas de metal presas na borda da mesa, dobre a régua em um ângulo de 90 graus a uma distância de 15 cm da borda em que os furos foram feitos.
Faça a mesma dobra em um ângulo de 90 graus, a uma distância de 15 cm da outra borda. Você receberá uma figura na forma da letra P.
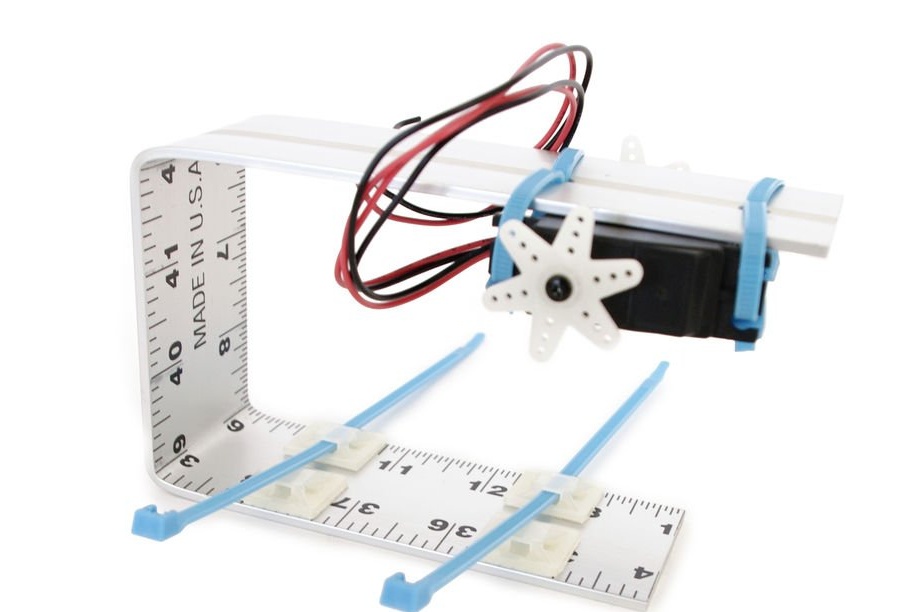
Etapa 5: Conexão
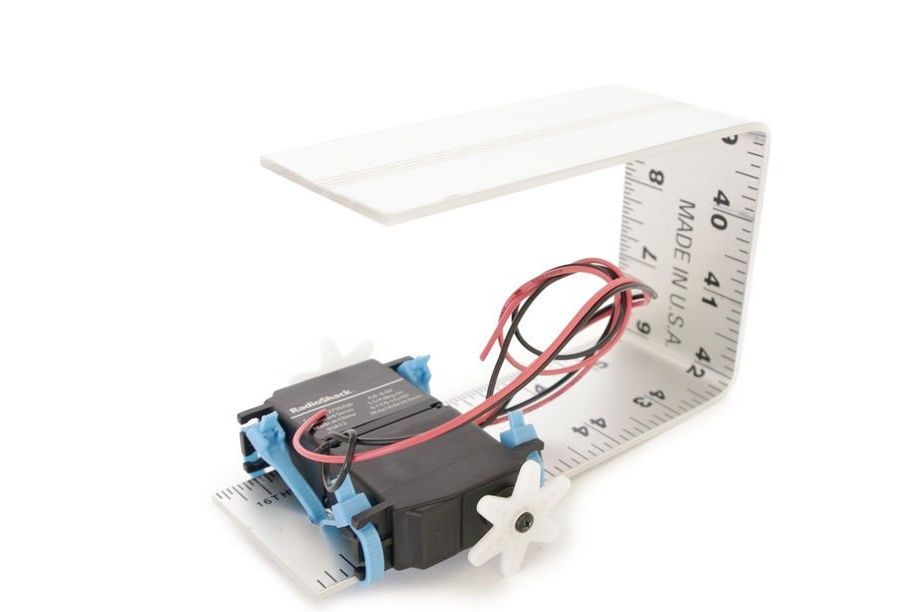

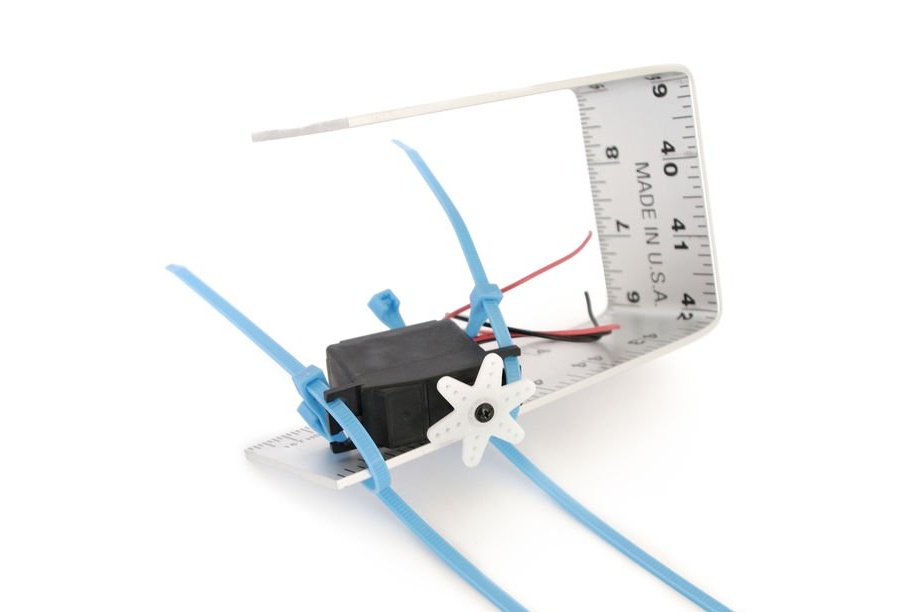
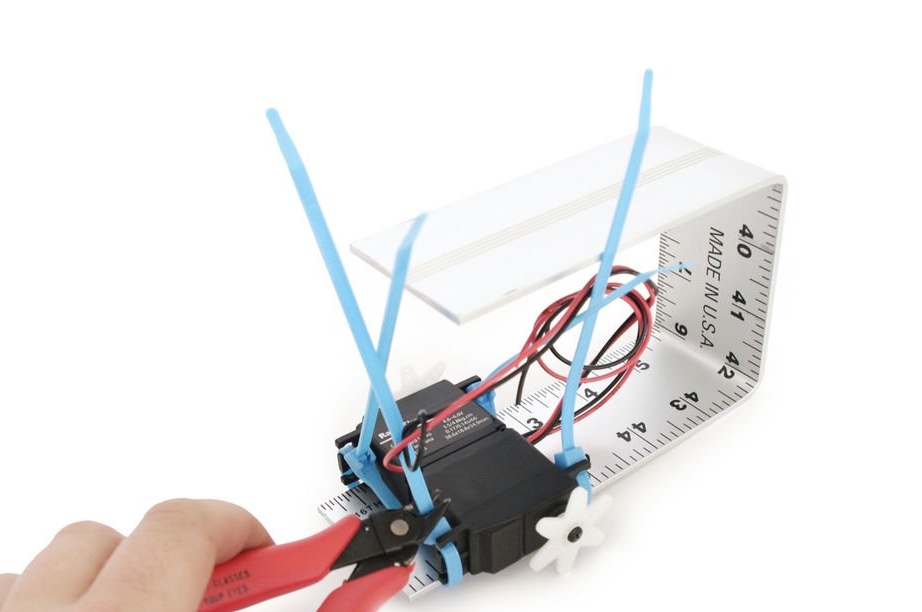
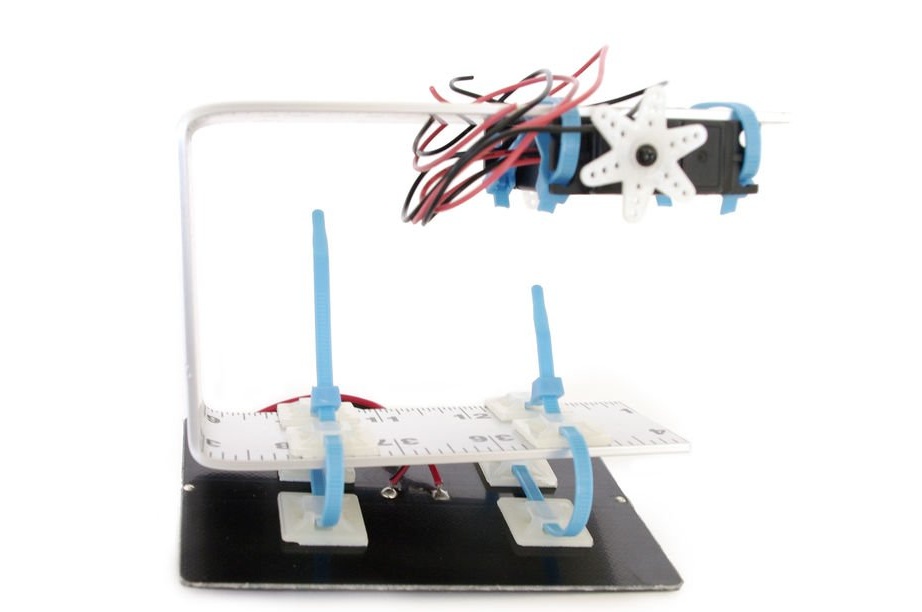
É necessário fixar os servos na linha com braçadeiras de plástico, através de furos. Os servomotores devem sentar-se de costas um para o outro.
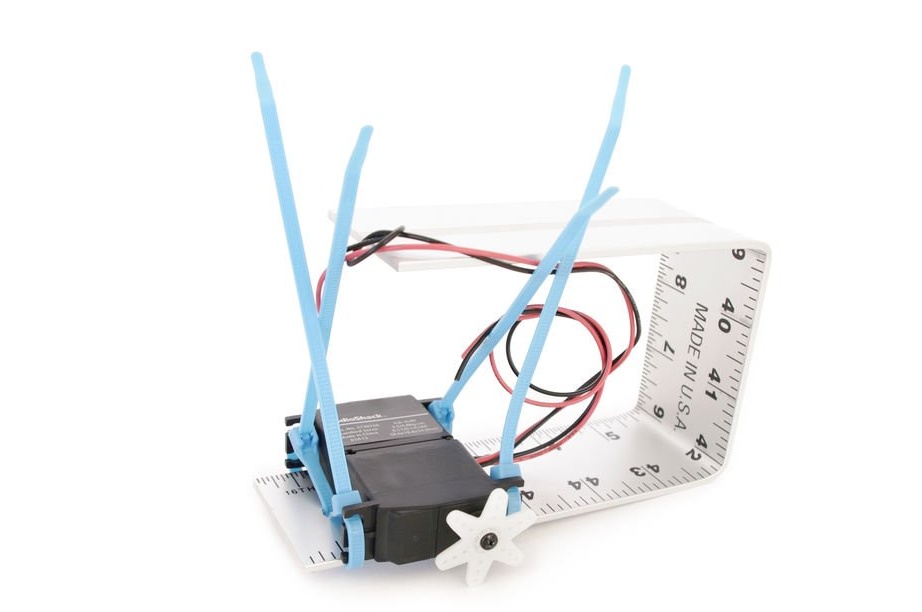
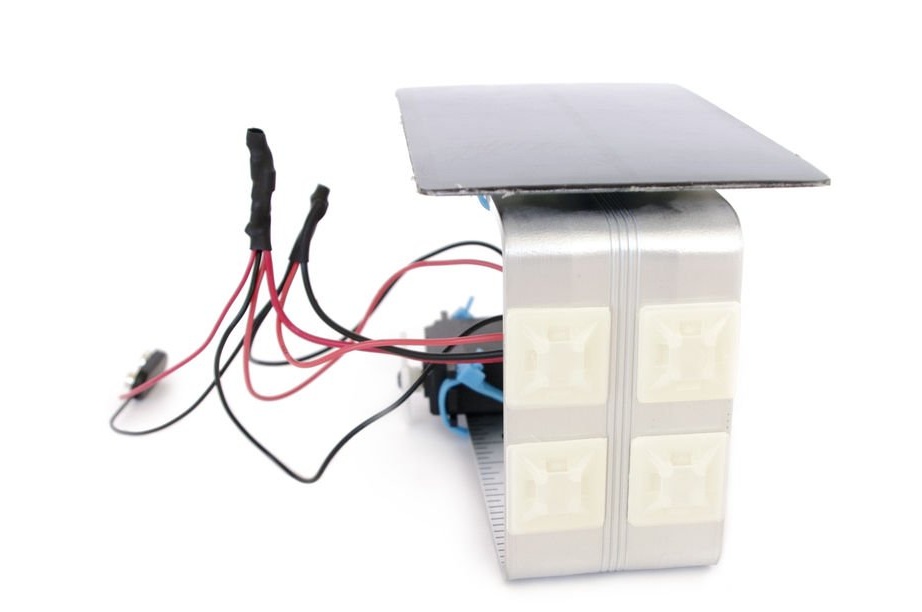
Etapa 6: Base para grampos
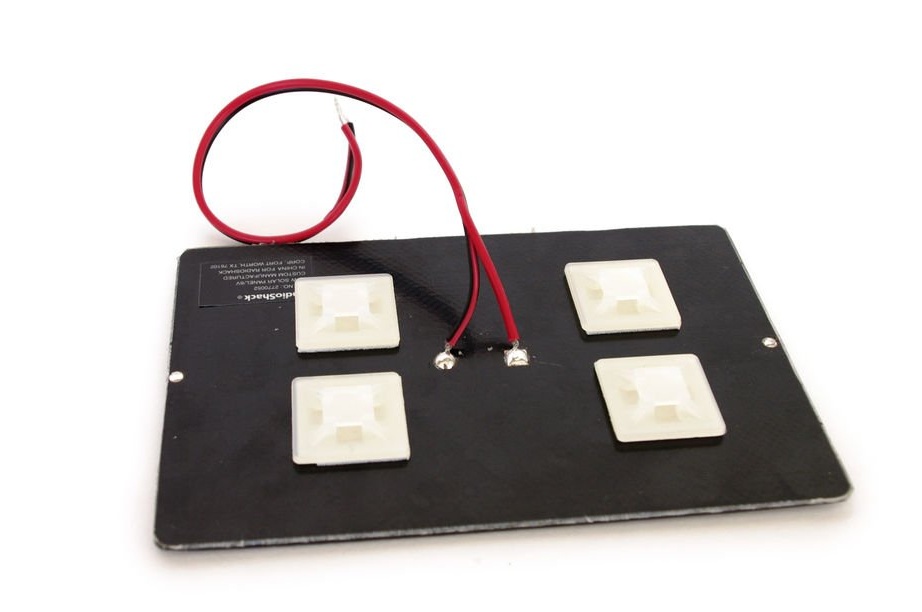

Coloque dois pares de bases de grampos um ao lado do outro na parte traseira do painel solar. É importante que os canais de cada par estejam na mesma linha.
Etapa 7: Mais motivos
Anexe mais duas bases ao interior da barra em U, ao lado oposto aos servos.
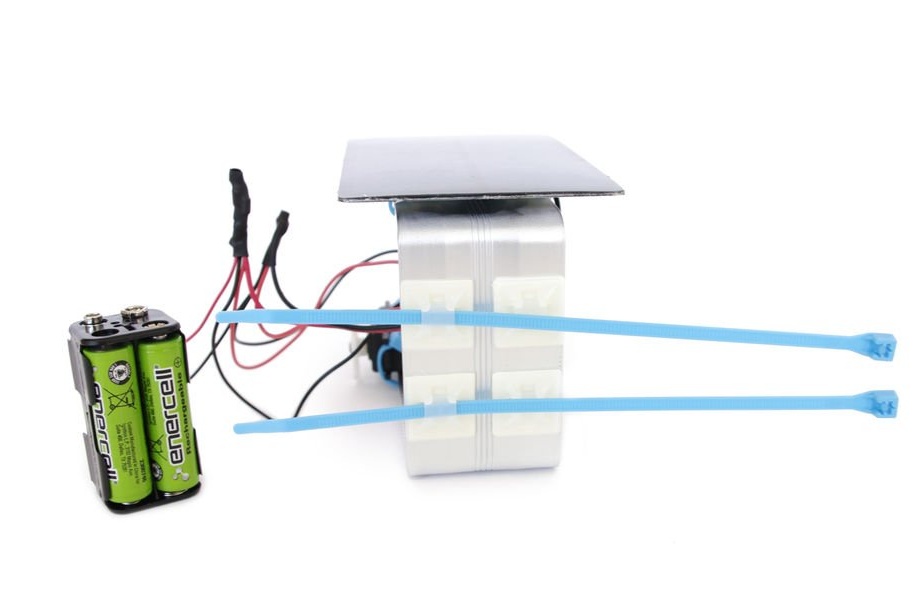
Etapa 8: Conexão
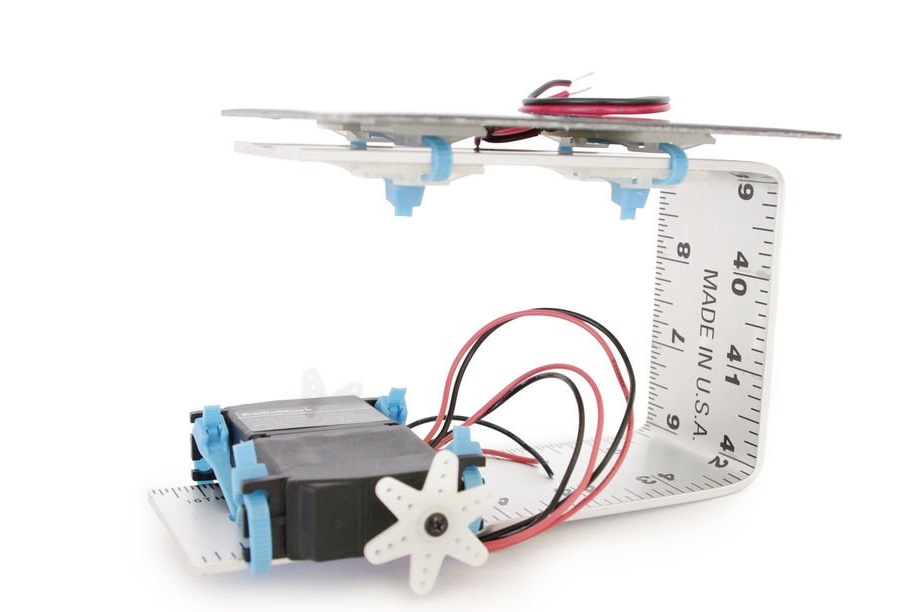
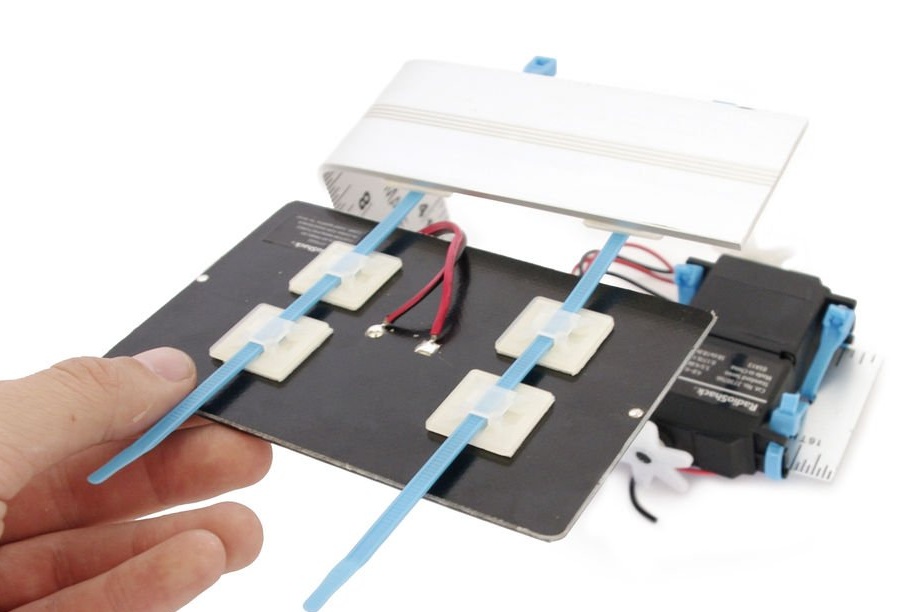
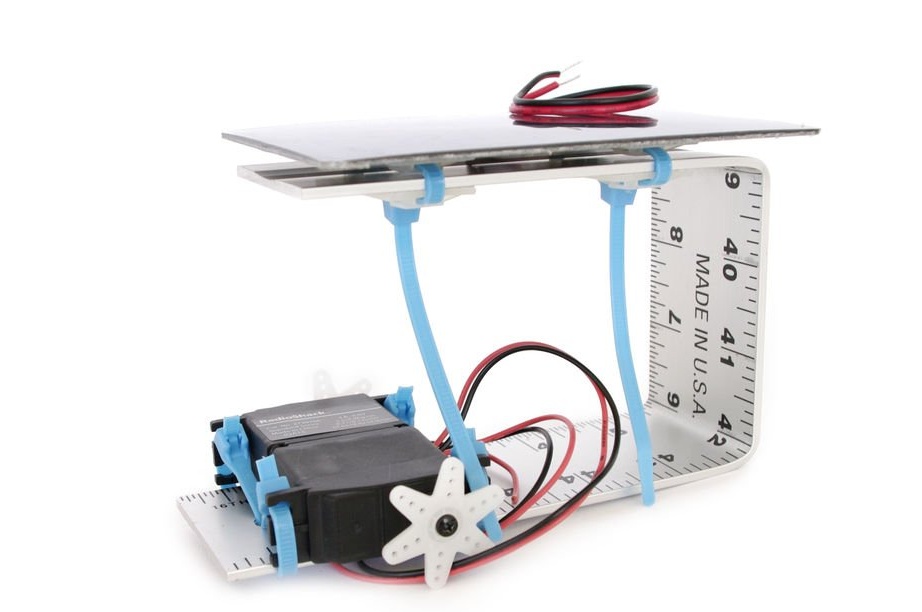
Anexe o painel solar com braçadeiras através de bases fixas.
Etapa 9: Inserir as baterias


Coloque as pilhas na bateria.
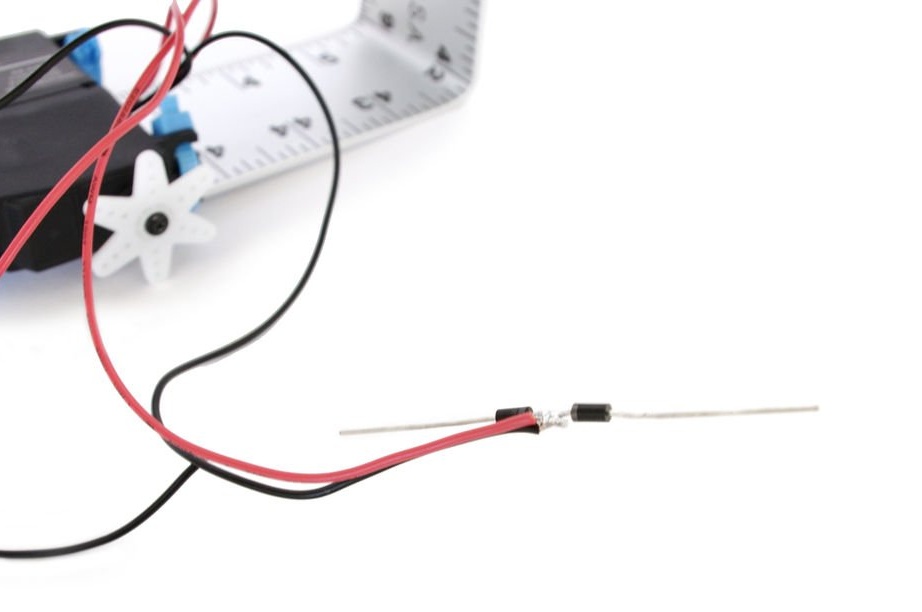
Etapa 10: diodos

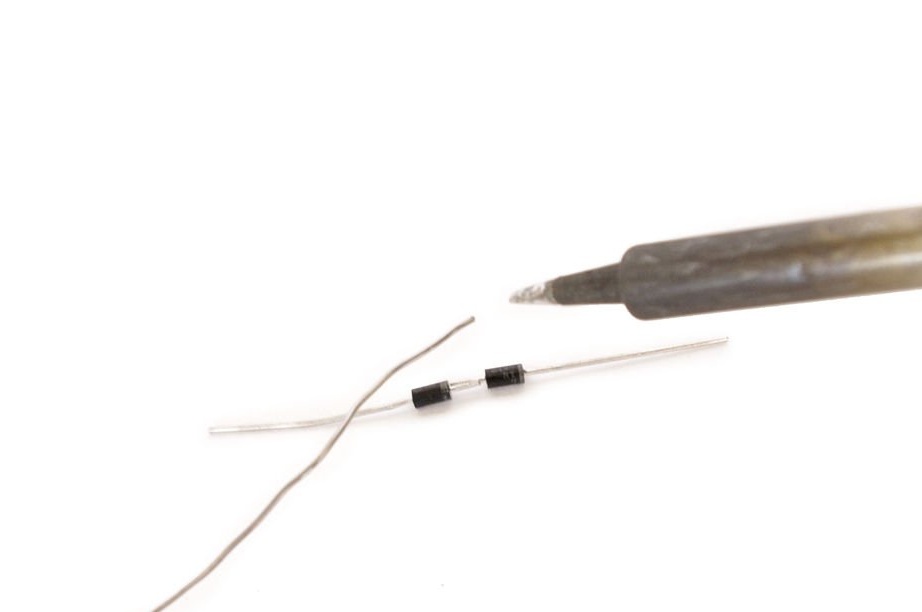
Solde os dois diodos juntamente com os cátodos (lado dos diodos com a faixa).
Etapa 11: montagem da corrente
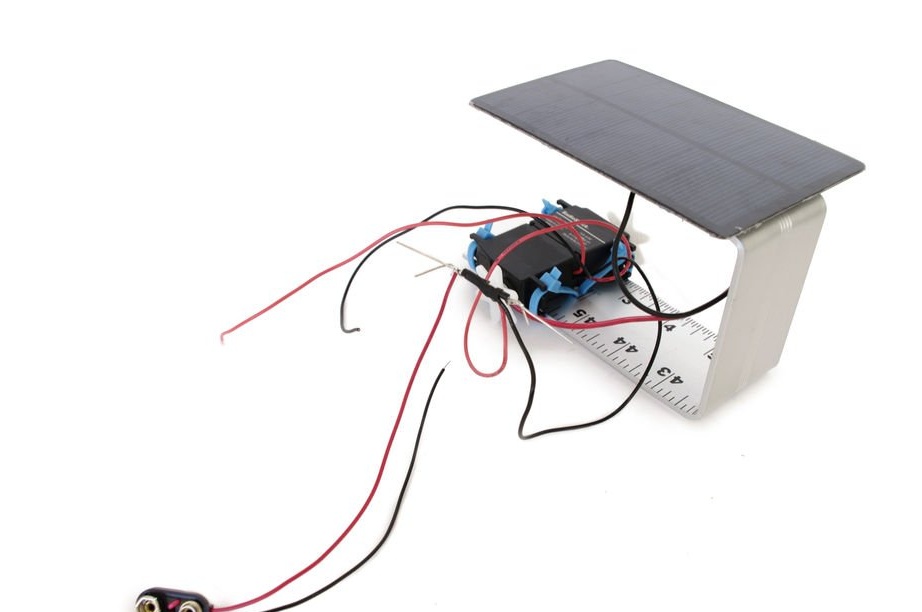
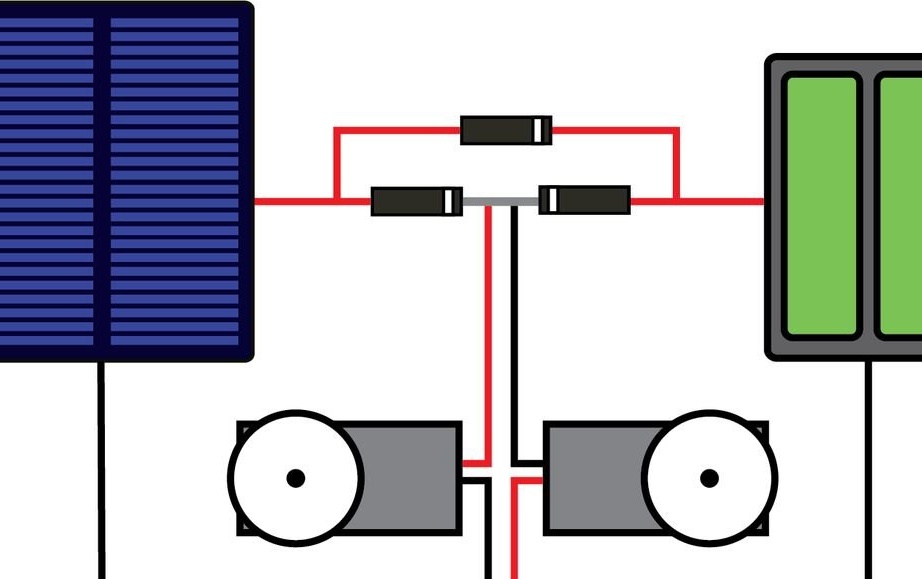
O circuito deste robô é baseado no simples circuito de carregamento solar de David Cook. O circuito contém dois diodos Schottky conectados por um catodo-a-catodo, um diodo conectado a um painel solar e uma das baterias. Essa configuração permite que você seja alimentado por baterias e pelo painel solar, dependendo das condições.
Como as baterias são recarregáveis, um terceiro diodo Schottky é conectado diretamente do painel solar ao compartimento para carregar as baterias do sol.
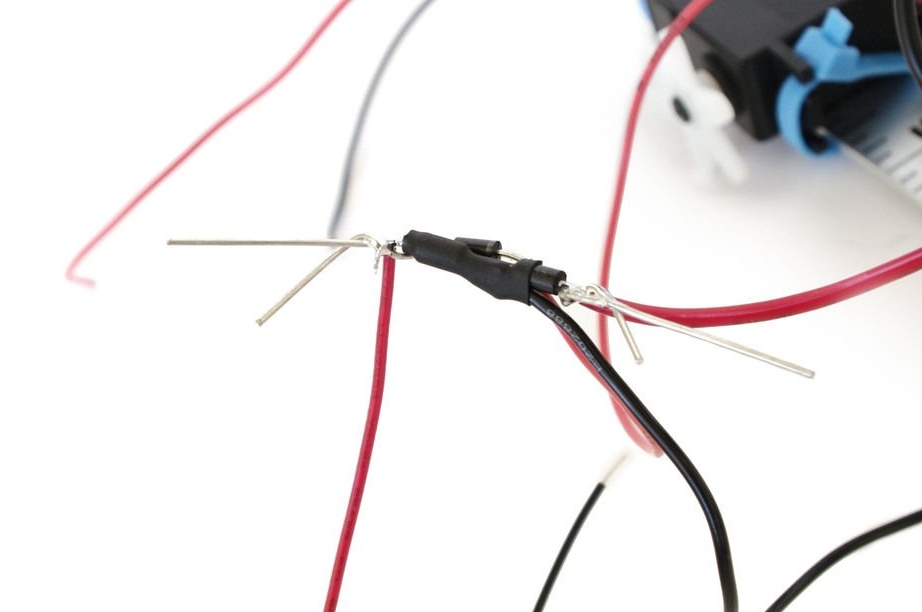
Para conectar tudo, conecte o fio vermelho de um dos servos e o fio preto do outro ao ponto central da conexão do cátodo.
Em seguida, conecte o fio vermelho do terminal da bateria ao ânodo de um dos diodos Schottky. Conecte o fio vermelho do painel solar ao ânodo em outro diodo.
Agora solde o ânodo do terceiro diodo ao fio vermelho que está conectado ao painel solar e o cátodo ao fio vermelho do terminal da bateria.
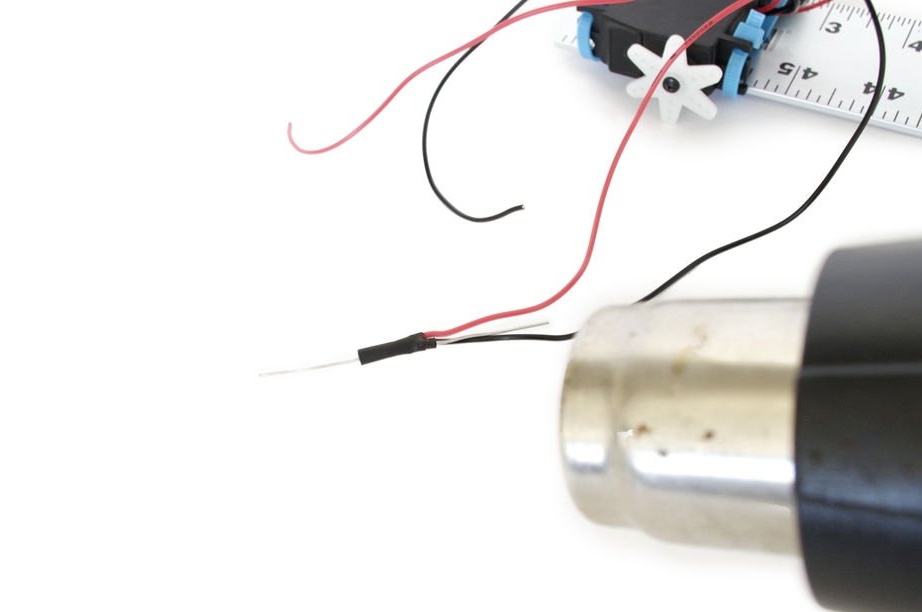
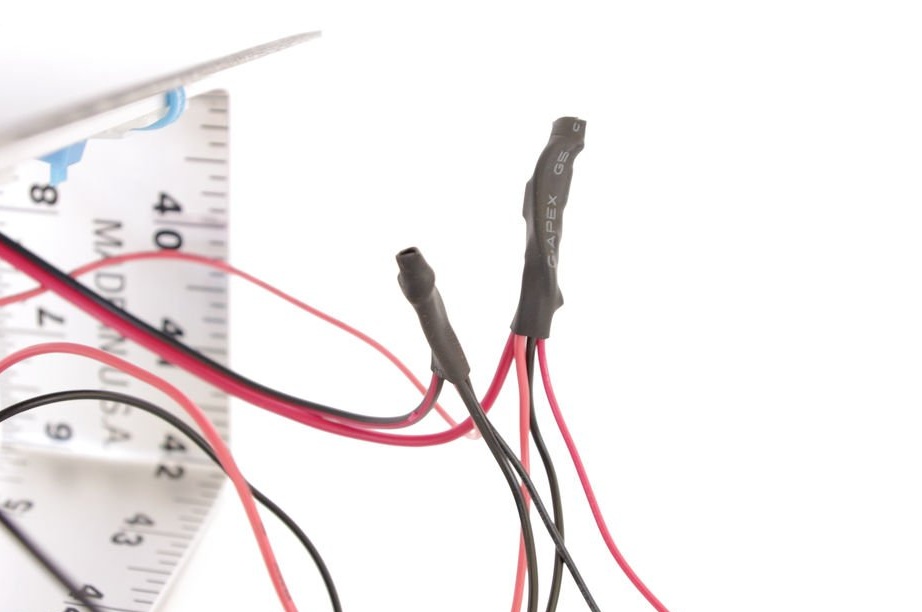
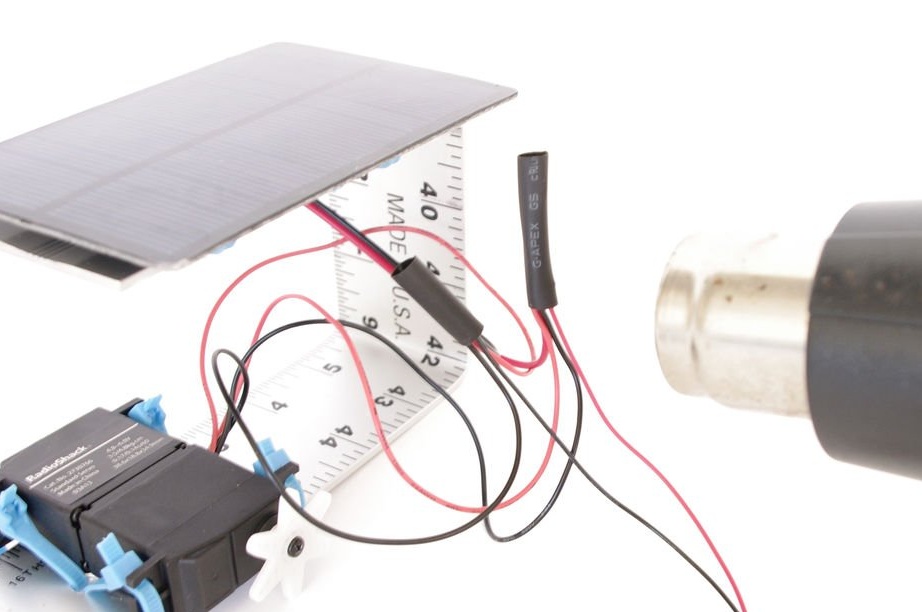
Enrole todos os fios com tubos termo-retráteis para proteger o circuito contra curtos-circuitos.
Etapa 12: Mais alguns fios
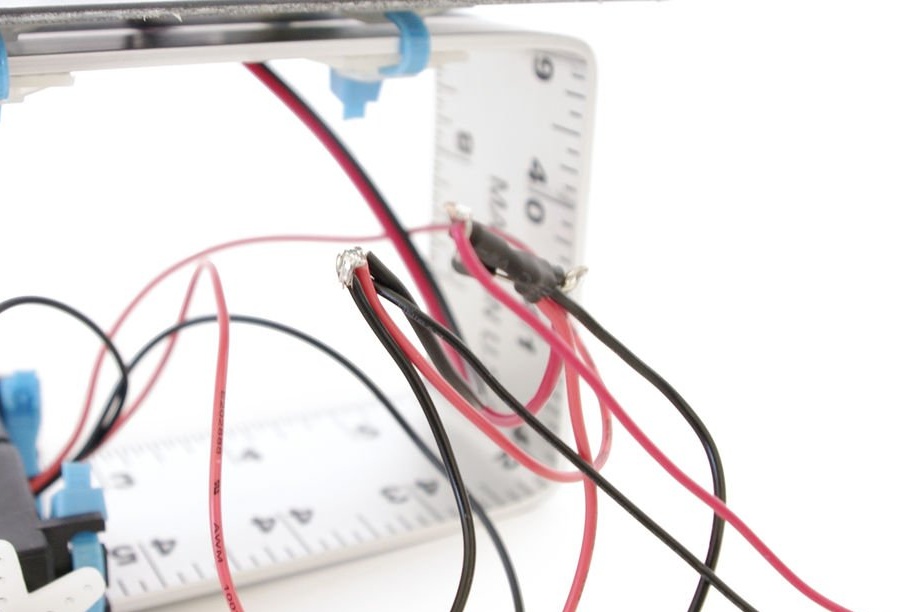
Solde todos os fios pretos e os fios vermelhos restantes restantes dos servos.
Obtenha duas juntas soldadas; um para poder e outro para aterramento. Enrole as duas juntas com tubo termo-retrátil ou fita isolante.
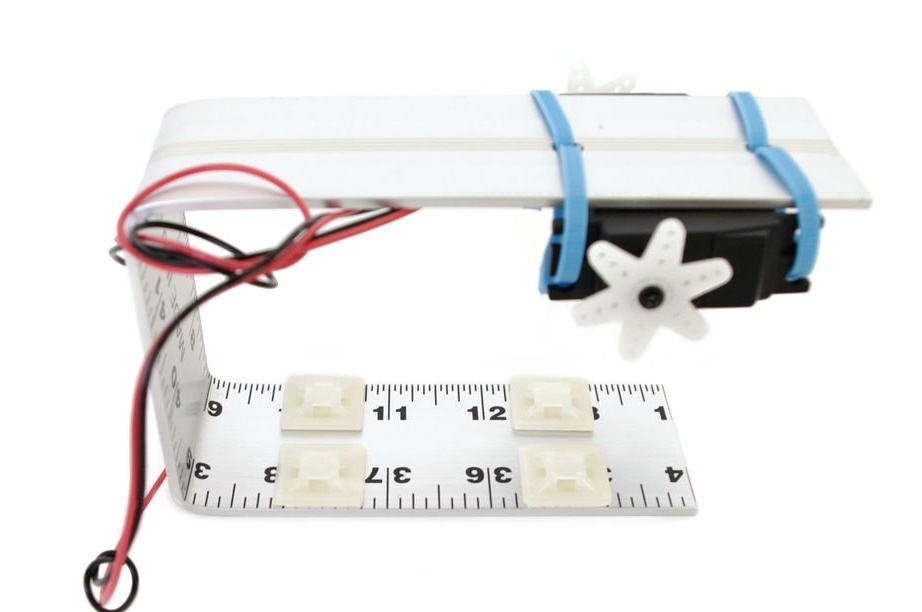
Etapa 13: e mais algumas razões para os grampos
Prenda dois pares de bases na parte inferior da régua curva em forma de U.
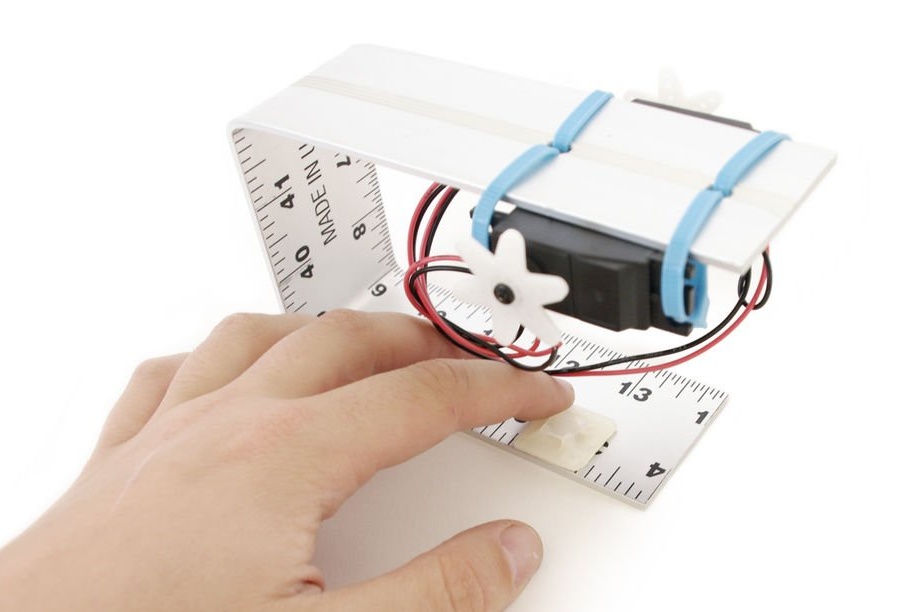
Etapa 14: Protegendo as baterias
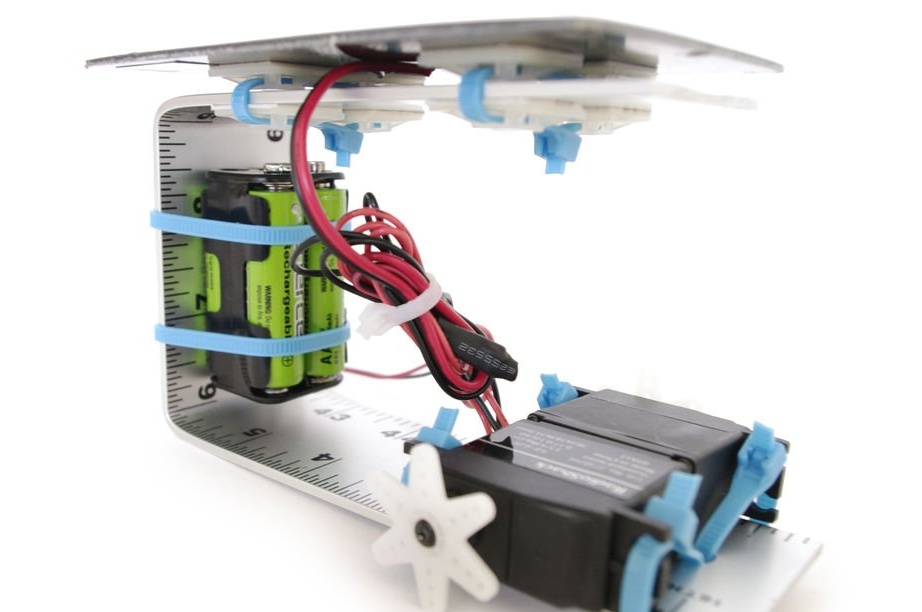
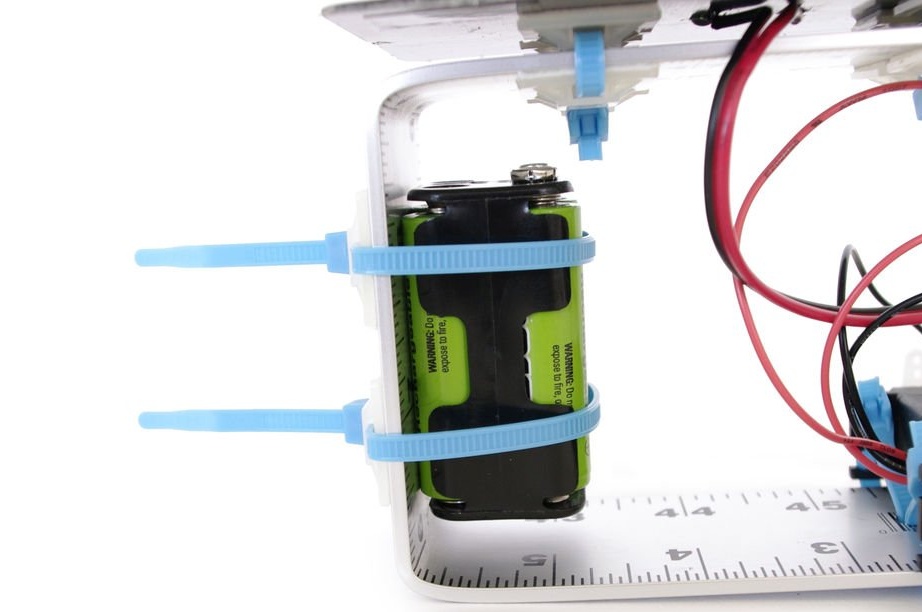
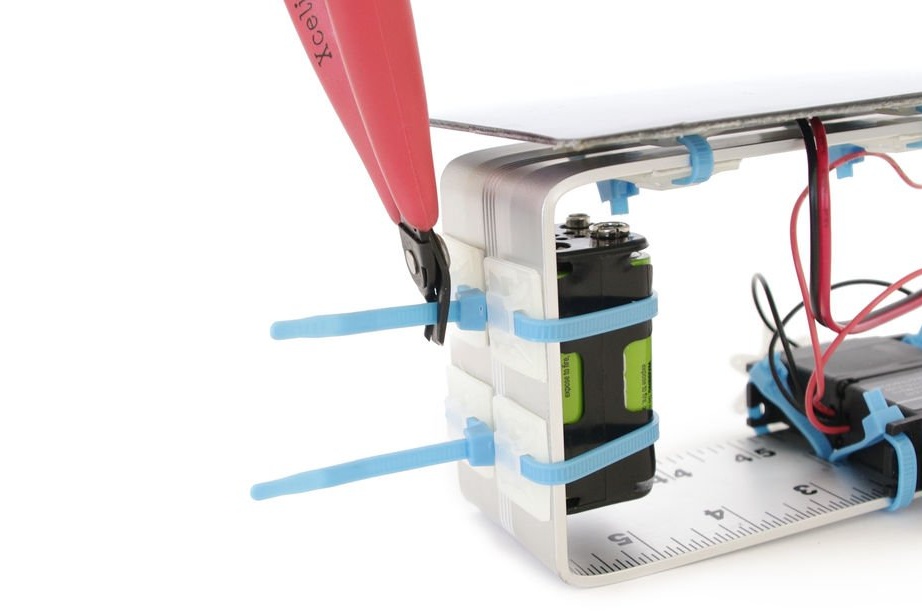
Prenda as baterias com grampos dentro da régua em forma de U, para que fiquem firmes e imóveis no lugar.
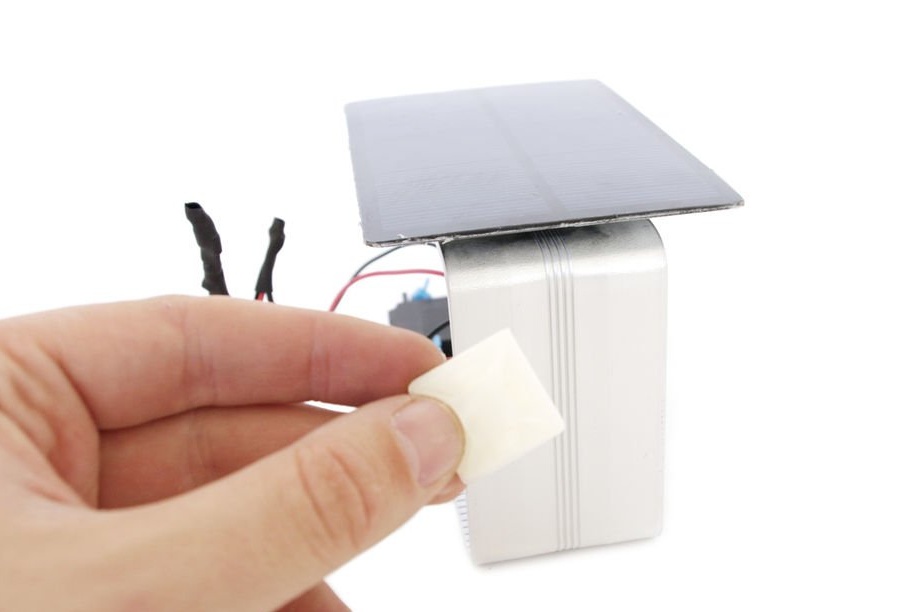
Etapa 15: aparar


Corte os ganchos nas montagens de parede de plástico.
Etapa 16: Rodas
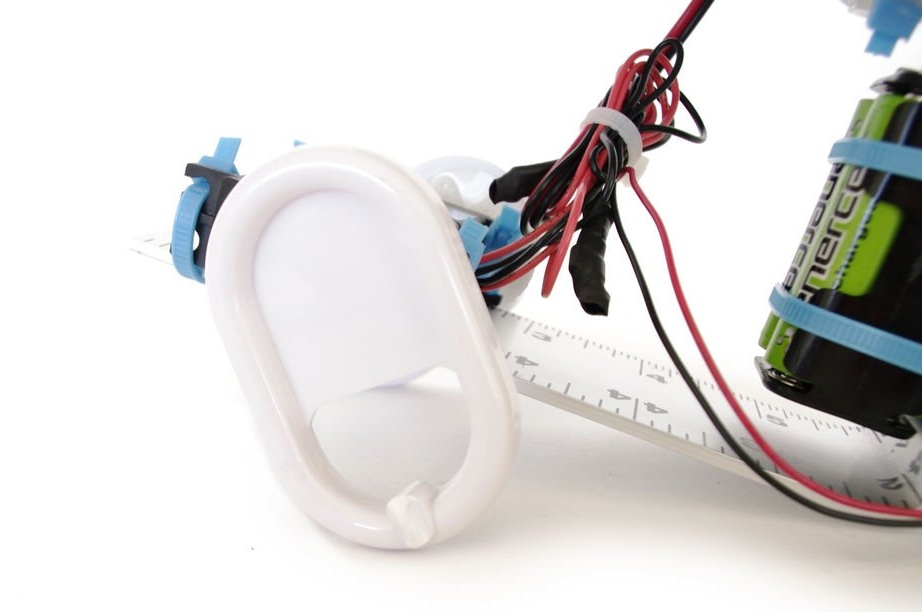
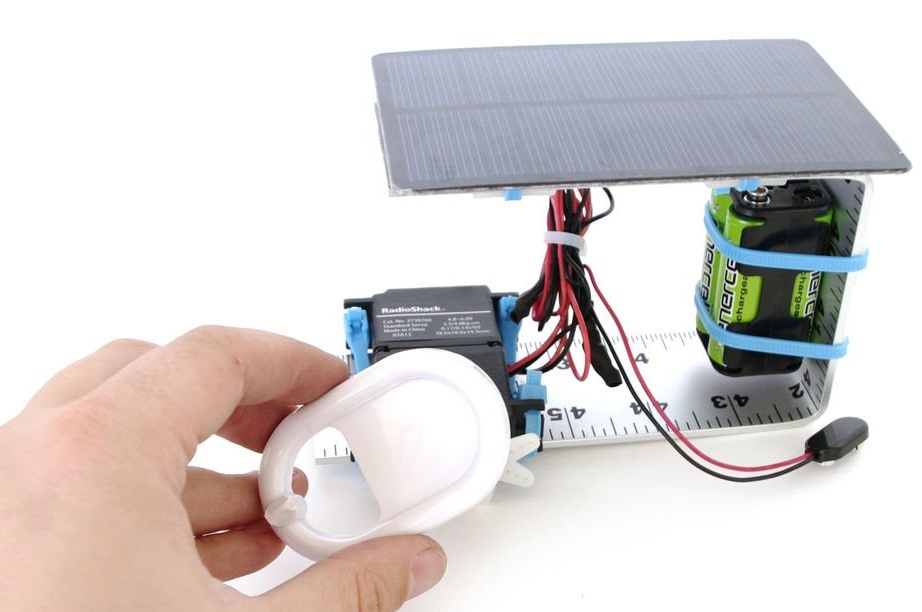
Cole as montagens de parede nas engrenagens externas dos servos (isso será algo como rodas).
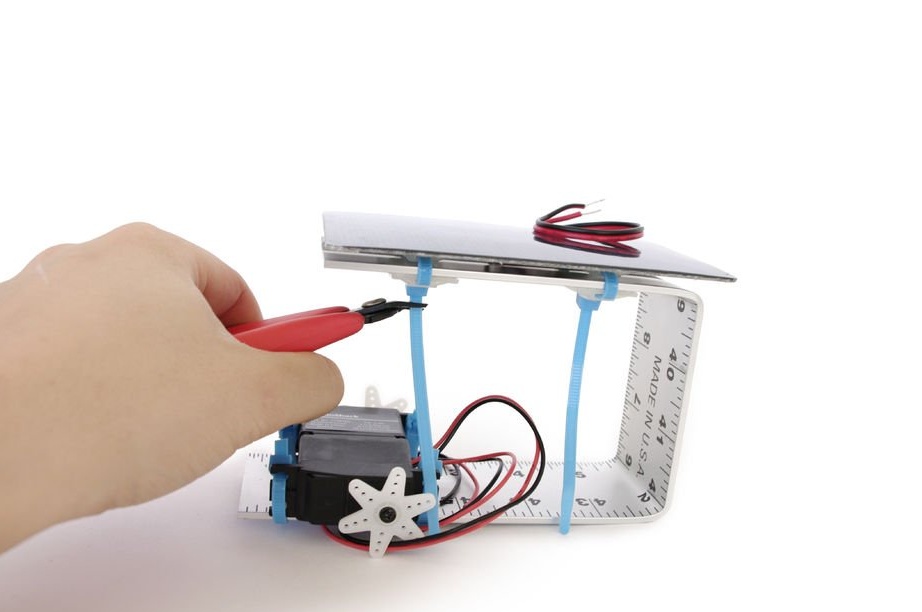
Etapa 17: Ligue!

Conecte o fio à bateria e o robô começará a se mover.