


Primeiro, vamos entender a diferença entre o octocopter e o quadcopter. Além do nome, este também é o número de motores nos trilhos. I.e. quadrocopter - quatro motores, octocopter - oito. Isso também é válido para o hexacóptero - seis, tricóptero - três etc. Se as guias, por exemplo, são quatro (X) e oito motores, ainda é um octocóptero, mas é designado como X8. I.e. em quatro trilhos, oito motores.
Basicamente, os números com um prefixo para helicópteros são aeronaves que são controladas pelo sinal de rádio do operador do solo. Um estudante da Índia decidiu ir além e criar um octocóptero capaz de elevar uma pessoa ao ar. Este não é um projeto barato. O financiamento foi assumido pela instituição de ensino.
Ferramentas e materiais:
- Motores Turnigy CA170 - 8 peças;
- Controlador Turnigy Fatboy 300A - 4 peças;
- Controlador Turnigy 200A HV - 4 peças;
- Transmissor Hitech XG11 Tx / Rx;
- Controlador DJI A3 Pro de voo;
Controlador de voo DJI Naza M V2;
- Bateria Zippy 22.2V 5Ah 40C LiPo - 16 peças;
- Carregador 6s LiPo;
-XT150 conectores - 50 peças;
-Fio Sillicone 8AWG - 10 metros;
Servos;
-Bola para jogar squash (bolas de squash) - 4 peças;
- folha de MDF 25cm x 50cm x 2mm;
-Broca;
- Rebarbadora;
- Chaves de fenda;
- Chaves;
- alicates;
- Cortador a laser ou serra de fita;
- Sortido de porcas de 4mm, 6mm e 8mm, parafusos e arruelas;
-Burner;
LED -LED;
Acessórios de solda;
- fio de aço de 2 e 3 mm;
- Parafuso Telrep 100mm-200mm - 40 peças;
- 40 ganchos e olhais;
-Tacômetro Turnigy RPM;
- Analisador de potência (Turnigy Wattímetro / Ampímetro);
Controlador de bateria;
- tubos de perfil de alumínio;
-Placa de alumínio;
- fita dupla face;
Máquina de solda;
Roleta;
-Computador com Fusion 360;
- Bateria 11,1 V 2200 mAh LiPo 30C;
-Tecido denso 1.2m x 1.2m;
- Linha e agulha fortes;
Segurança de cinto;
Etapa 1: Design
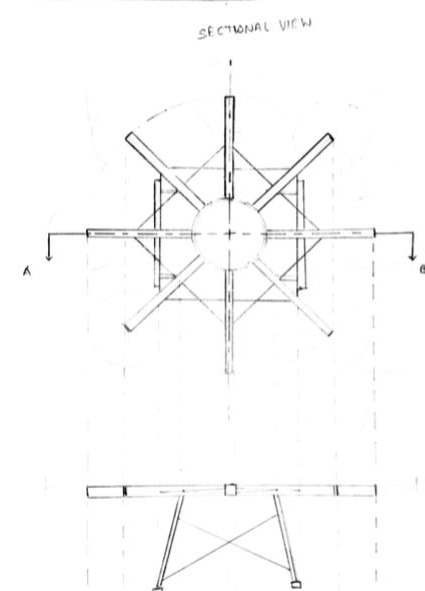
Ao desenvolver um octocóptero tripulado, o mestre considerou várias opções de configuração, e X8 e H e T, mas chegou à conclusão de que o mais ideal, por várias razões, seria o design do octocóptero, de acordo com o esquema tradicional.
Então foi necessário descobrir qual deveria ser o tamanho do octocóptero. Os cálculos foram feitos usando modelos CAD no Fusion 360 como exemplo. Os parafusos existentes foram levados em consideração nos cálculos. O ideal acabou sendo um diâmetro de três metros, uma altura de um metro. Cesto interno, para uma pessoa 55x55 cm.

Etapa 2: carrinho de compras
A estrutura foi soldada a partir de um perfil quadrado de alumínio com uma prateleira de 50 mm e uma espessura de parede de 2 mm.
O perfil foi cortado e soldado. As costuras estão limpas.



Etapa três: Placas de montagem
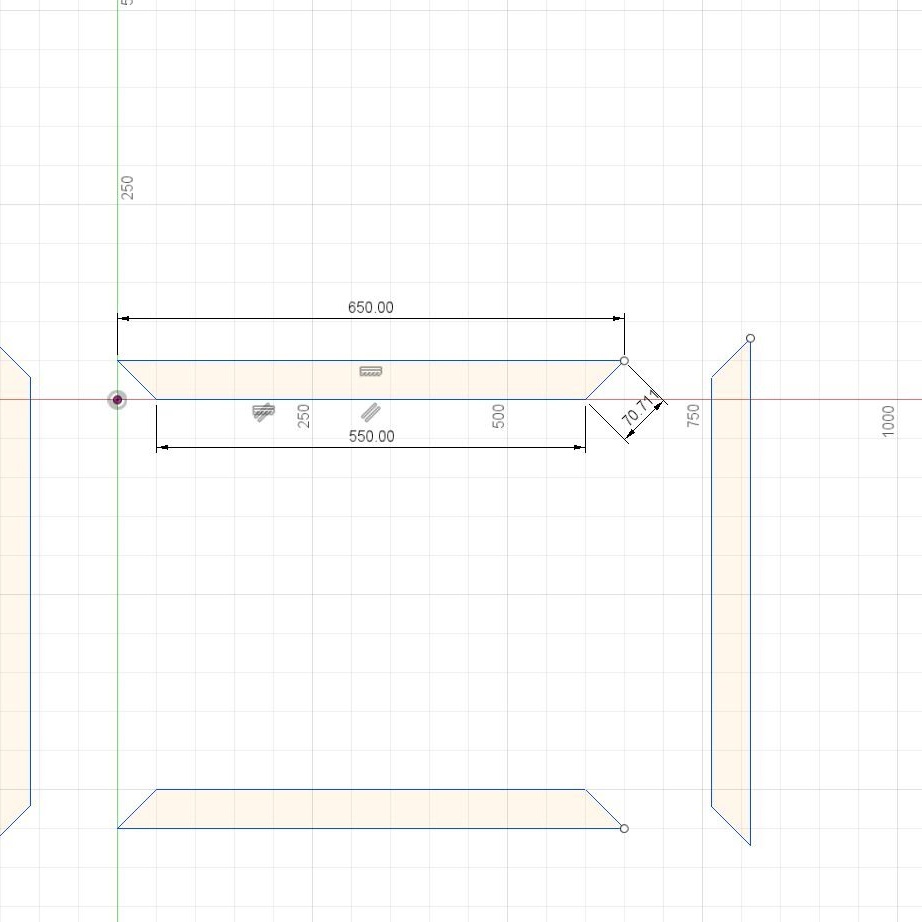
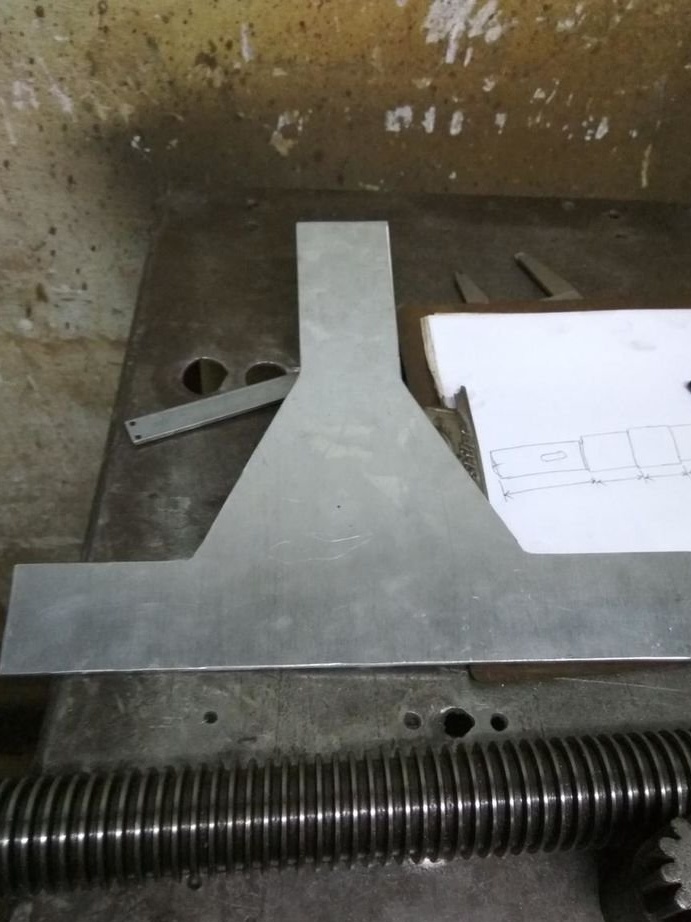
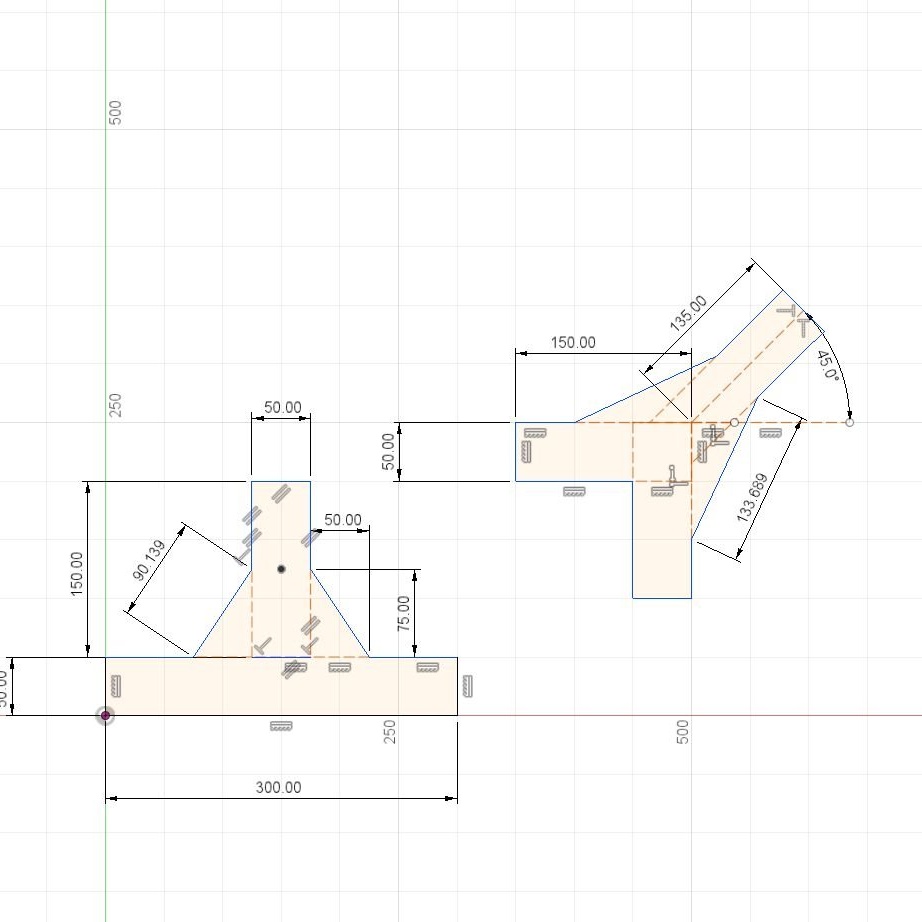
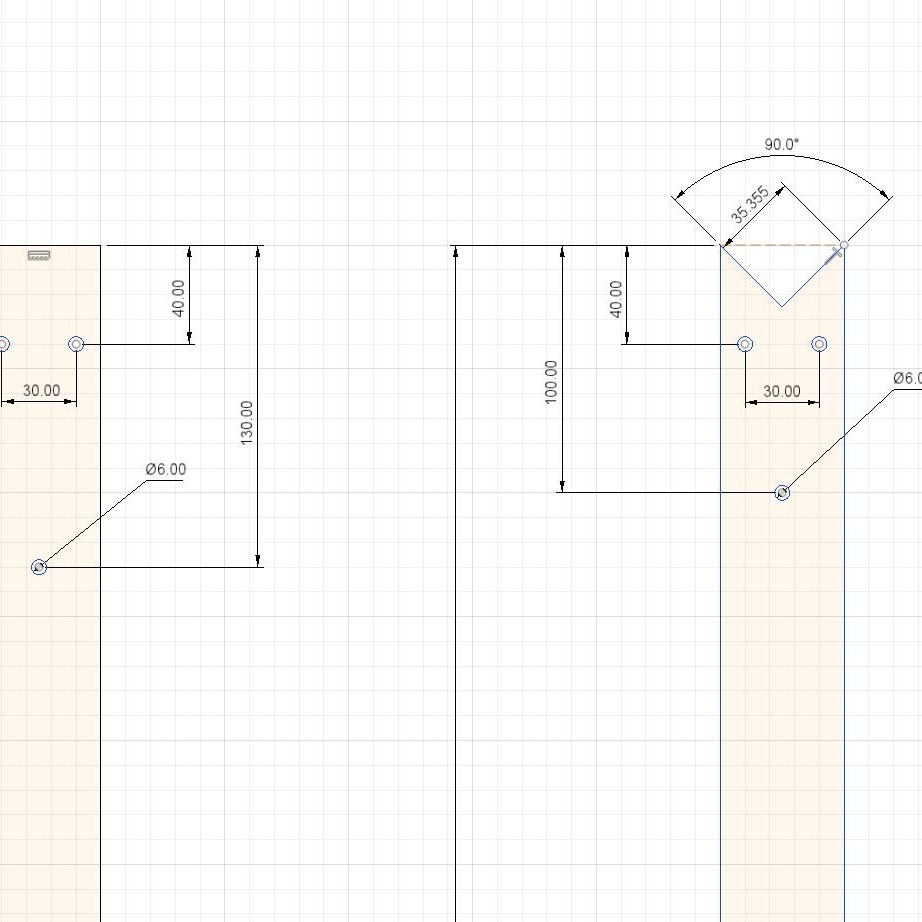
Para suportes, o mestre usava placas de alumínio de 1,5 mm. Existem oito colchetes no total, quatro nos cantos e quatro no meio do quadro. O comprimento do ombro do braço e a parte de suporte tem 15 cm cada.Os suportes foram projetados no Fusion 360. As placas foram cortadas com uma fresa. Os furos de montagem são perfurados neles. Em seguida, os suportes foram soldados ao quadro.






Etapa quatro: perfil da transportadora
Esses perfis são fixados aos suportes e os motores são instalados nas extremidades. Os perfis são quadrados, 50 x 50 cm e têm comprimentos diferentes. Perfis com 112,5 cm de comprimento são fixados nos cantos e 125 cm de perfil nas laterais.Um recorte é feito em perfis angulares em um ângulo de 45 graus. É necessário que sua face final seja adjacente ao plano do ângulo.
Para fixar os perfis nos suportes, o mestre faz furos para os parafusos.




Etapa 5: Montagem do motor
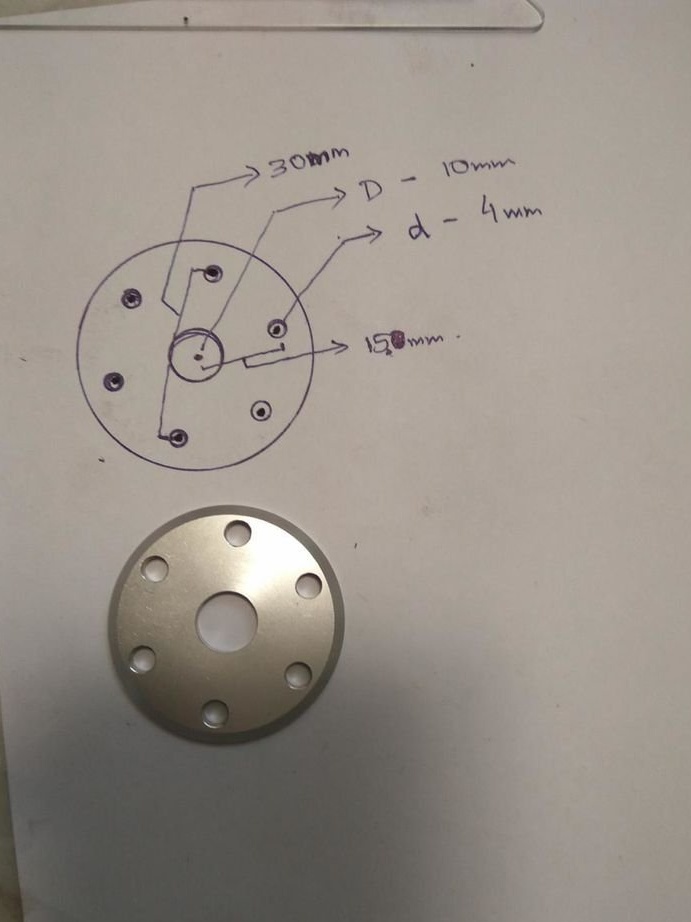
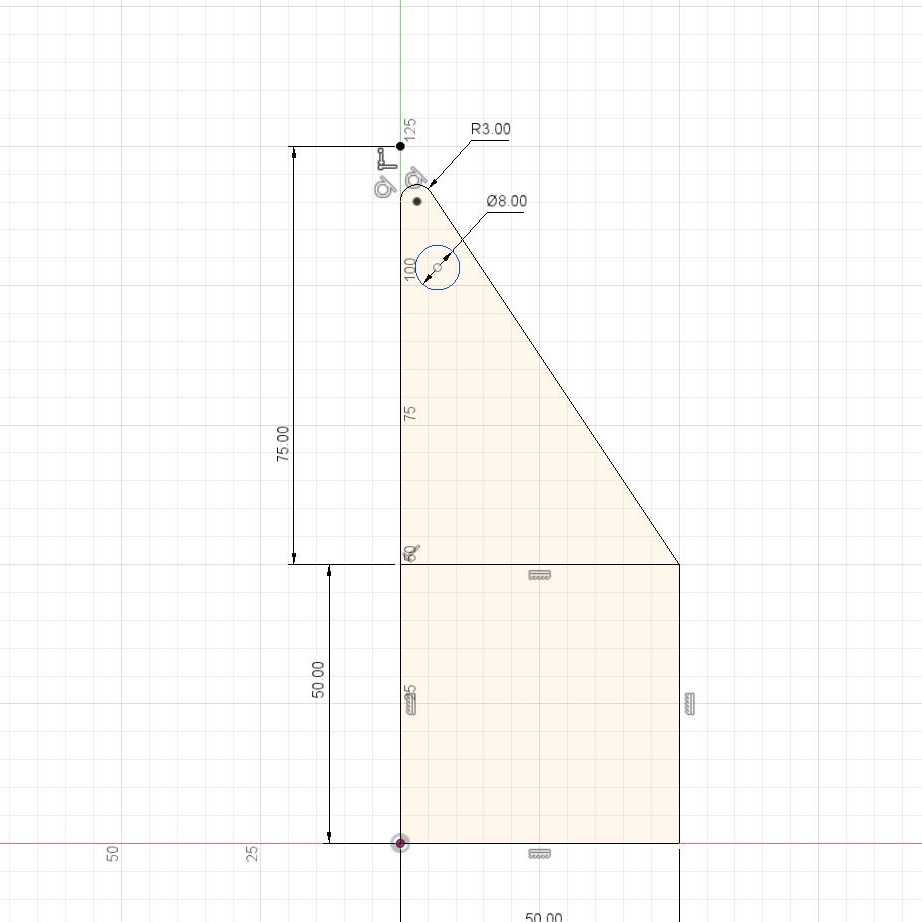
Os motores são parafusados em uma placa quadrada de alumínio. Na parte inferior da placa, paralelamente, dois cantos são parafusados. A distância entre eles é igual à largura do perfil. Além disso, a placa com o motor é montada no perfil, os furos de montagem são perfurados e tudo é torcido com parafusos.





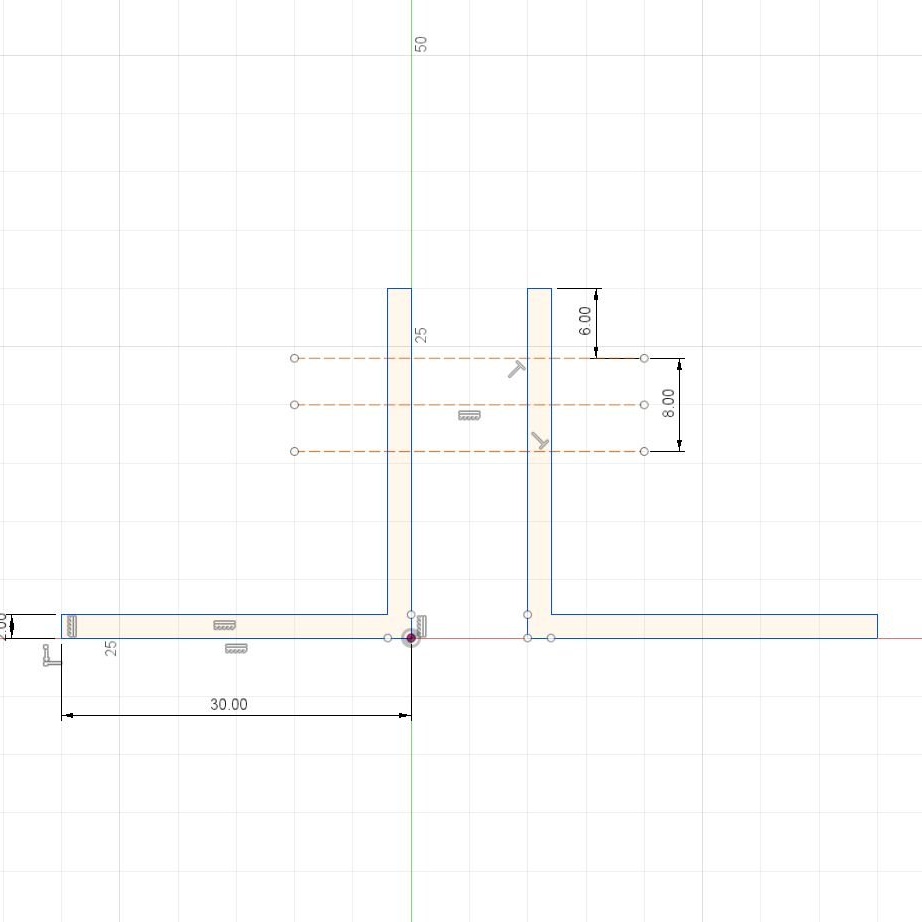
Etapa seis: chassi
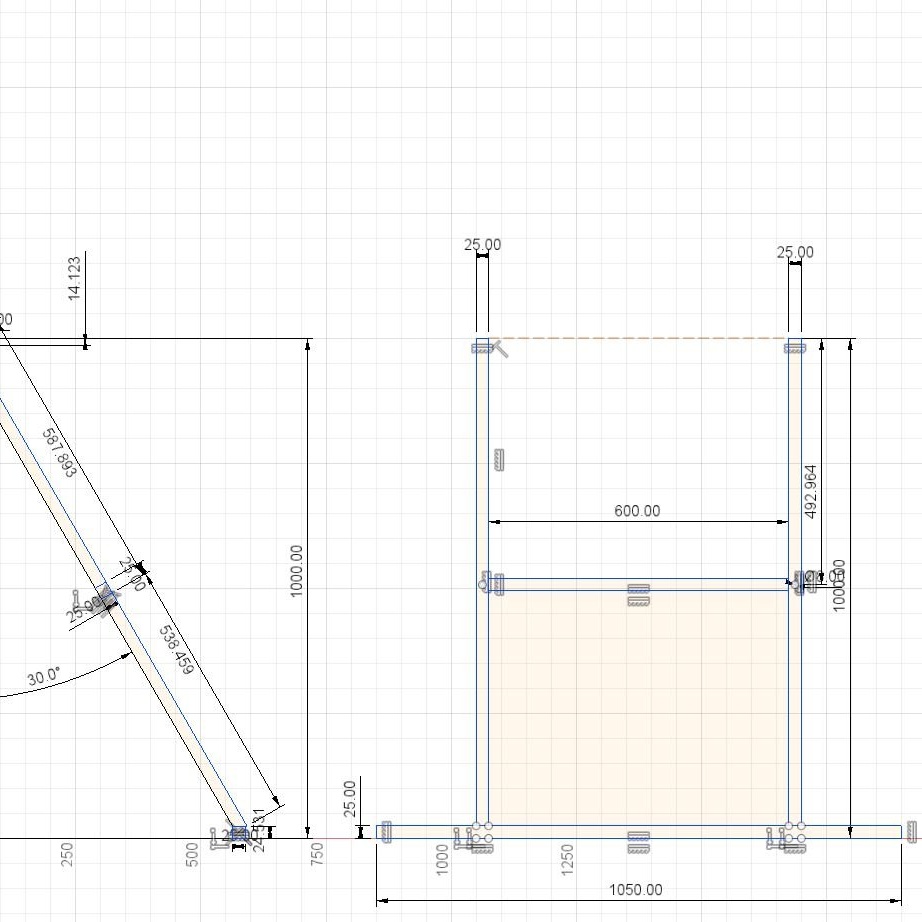
O chassi era feito de perfis de alumínio de 25 x 25 mm e uma espessura de 3 mm. Todas as peças foram soldadas e seus tamanhos podem ser vistos na foto. A idéia era montar o chassi da cesta em um ângulo de 30 graus. Para evitar danos ao chassi, os cabos de suporte são puxados entre eles.


Etapa 7: Suporte aos perfis de suporte
Após a instalação dos motores, os perfis de suporte começaram a dobrar. Então o mestre tentou dar partida no motor e descobriu que os perfis "andavam". Foi necessário fortalecer o design.
Adicionar placas adicionaria muito peso à estrutura. Então o mestre decidiu fazer um desenho em forma de V da cesta para baixo. As cordas estão presas à sua parte inferior. As outras extremidades dos cabos estão presas aos suportes no meio dos perfis de suporte. Os cabos são puxados com uma talha. Assim, a estrutura fica rígida.















Etapa Oito: Conectar
Primeiro, o mestre solda os conectores até as extremidades dos fios.


Então começa a instalação. Cada motor teve que ser verificado quanto ao sentido de rotação. Se necessário, é fácil alterar a direção de rotação do motor e, consequentemente, o parafuso, trocando dois dos três fios provenientes do ESC para o motor. Depois que todos os motores foram conectados corretamente, o assistente fez a instalação de acordo com o diagrama de conexão do fabricante.
Os controladores de vôo IMU DJI A3 são muito sensíveis à interferência de metais, e o mestre não conseguiu configurar o sistema devido a interferências. Como resultado, o mestre substituiu A3 pelo Naza M V2, que tinha um esquema de conexão semelhante. O Naza M V2 funcionou com muita confiabilidade.
Em seguida, o assistente conecta as baterias. Em cada perfil de transportadora, duas baterias de 22,2 V são conectadas em série.



Etapa nove: assento piloto
O assento foi costurado em tecido durável. Além disso, um cinto de segurança é acoplado ao piloto, que está acoplado ao quadro, e um capacete.






Passo Dez: Primeiro Vôo
Antes do voo do piloto no octocóptero, vários testes foram realizados com um saco de areia e depois com o modelo de uma pessoa. Durante o vôo, várias situações foram simuladas, da perda de controle a uma rajada de vento.
Depois de todos os testes, o piloto finalmente voou no ar.






Antes de voar, você deve executar as seguintes ações.
Verifique o aperto dos parafusos, cabos, montagem do motor.
Verifique a fiação.
Verifique se os parafusos giram facilmente.
Verifique se todos os ESCs estão desativados.
Verifique se todas as baterias estão firmemente conectadas e carregadas.
Conecte a energia ao controlador de vôo para inicialização e calibração.
Depois de conectar ao GPS, ele mudará para o modo totalmente automático (Alt. + Att. Hold).
Sente-se no assento do piloto e aperte o cinto.
Conecte todas as baterias ao ESC.
Conecte as duas baterias em série (ESC-RB-RB-ESC) usando um resistor para eliminar a centelha.
Ligue os motores, colocando o interruptor na posição ligado.
Use o controlador para controlar o octocóptero.