
Hoje faremos uma pequena máquina controlada por rádio, não apenas uma máquina, mas um verdadeiro dispositivo espião.
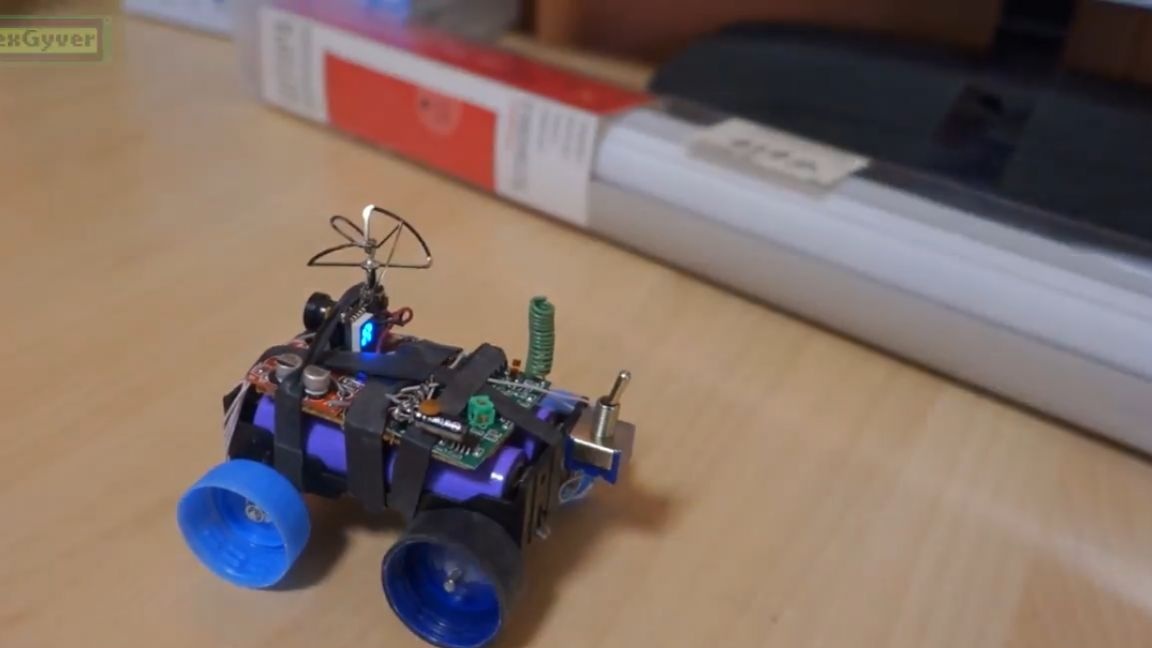
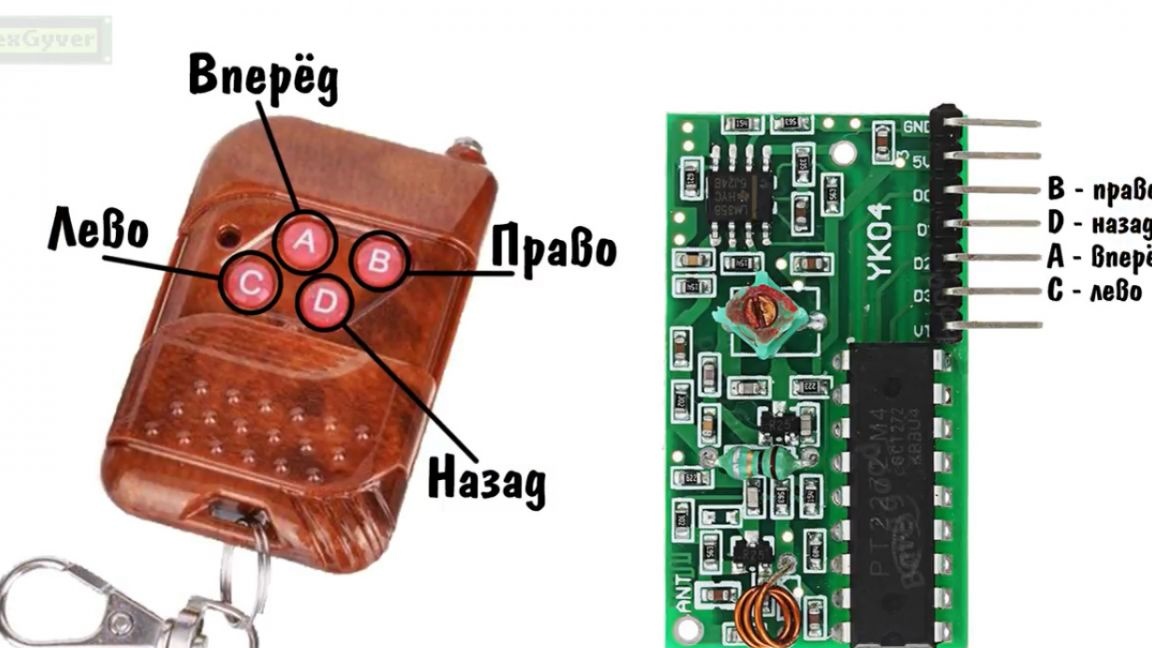
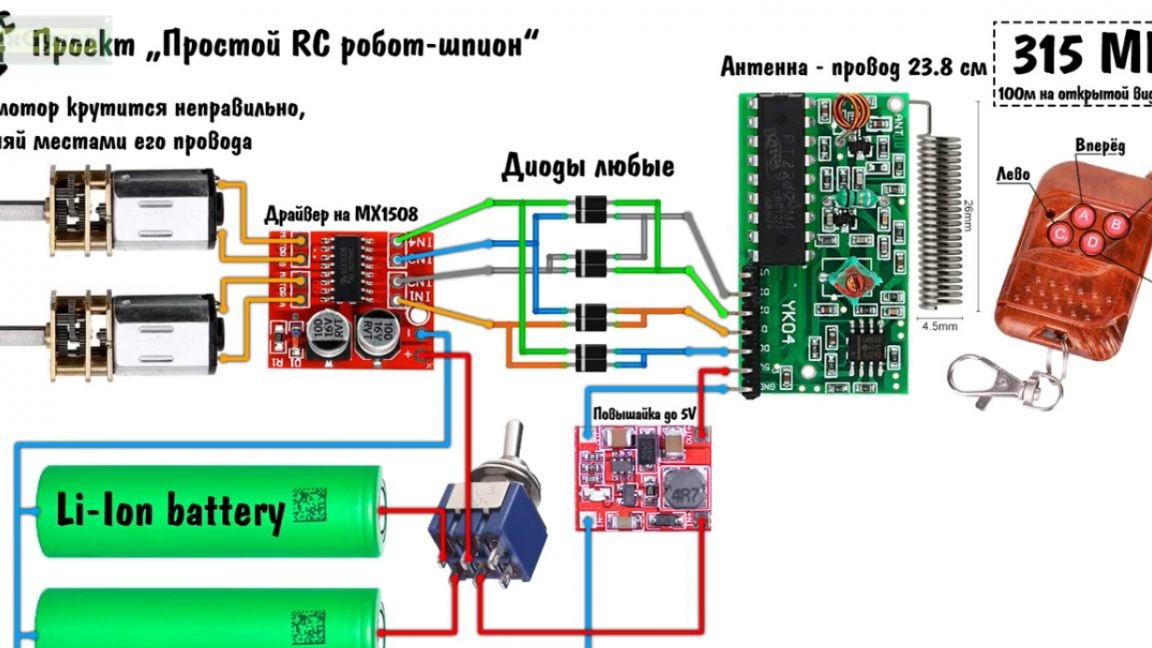
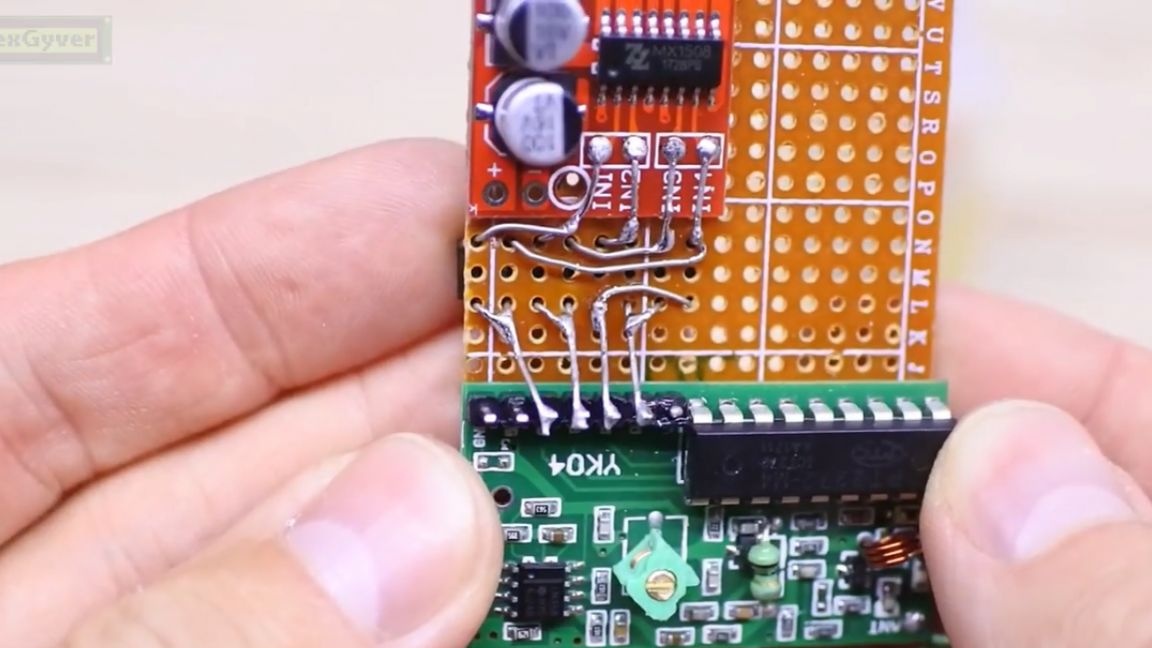
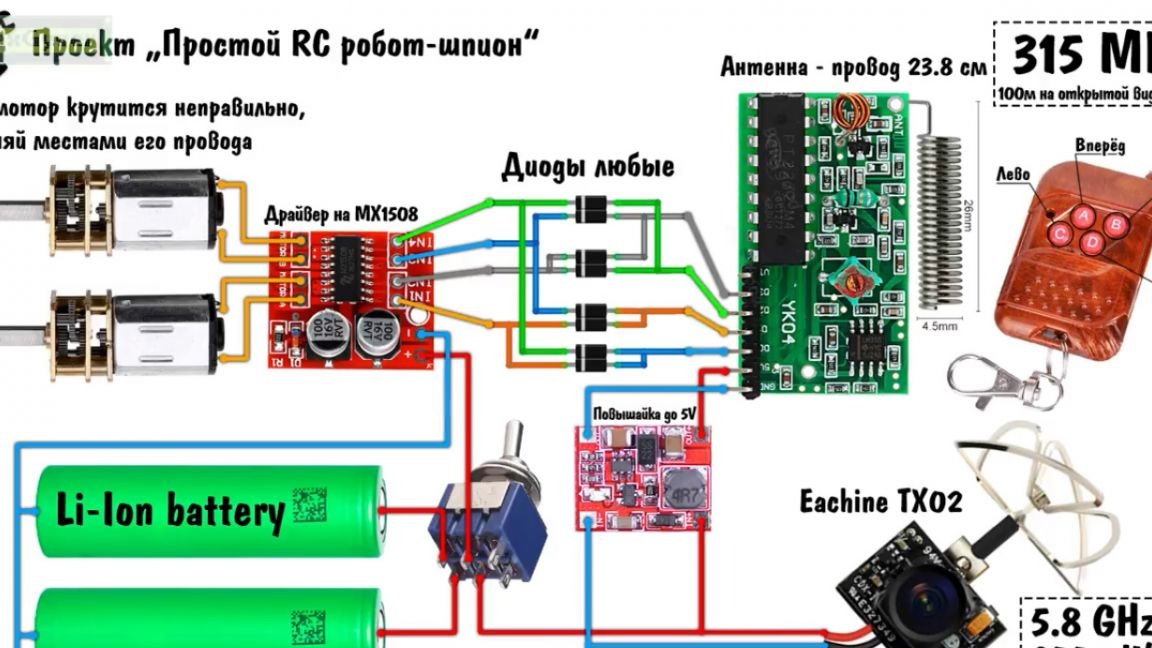
O autor deste produto caseiro é AlexGyver. Então, vamos começar. Portanto, veja, existe um módulo transmissor de 315 MHz na forma de um controle remoto de quatro botões e um receptor com quatro saídas lógicas para cada botão.
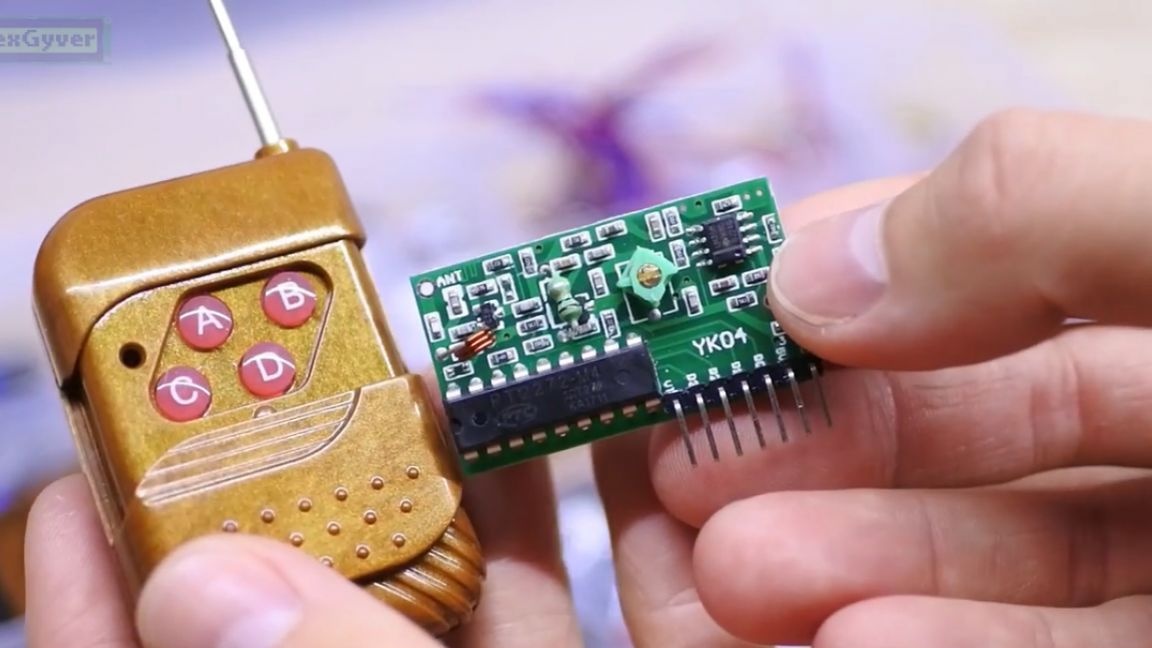

Tudo isso funciona de uma maneira muito óbvia: eles pressionaram um botão de 5 volts na saída correspondente. Já existe um bom potencial para arduino projetos. Há também um driver para 2 motores no chip mx1508.
Componentes para o robô (links para Aliexpress):
FPV:

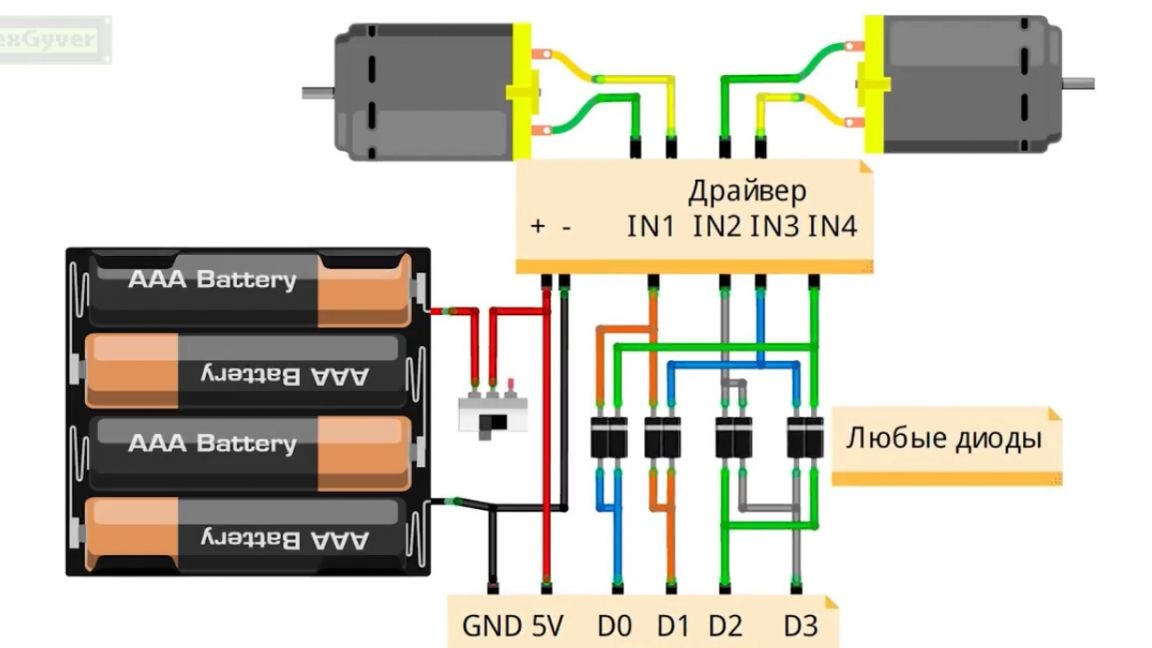
Este é um moderno quase análogo ao velho l298 coxo. Com ele, tudo também é muito simples, conectamos 2 motores e, com um sinal lógico, giramos em uma ou outra direção.
E não há nada mais fácil do que conectar esses 2 módulos e obter o controle da máquina em um esquema de tanque. Resta apenas descobrir como conectar o módulo receptor do acionador do motor para que os motores liguem conforme necessário, ou seja, a lógica da transmissão do sinal deve ser algo assim, correspondendo aos botões no controle remoto.
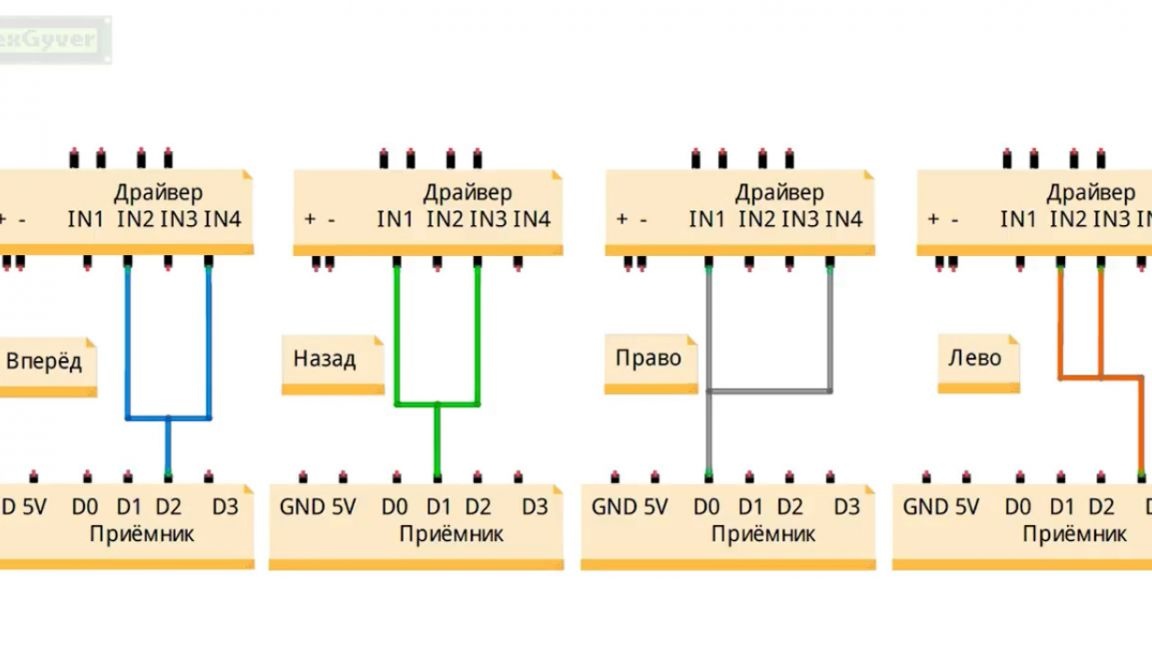
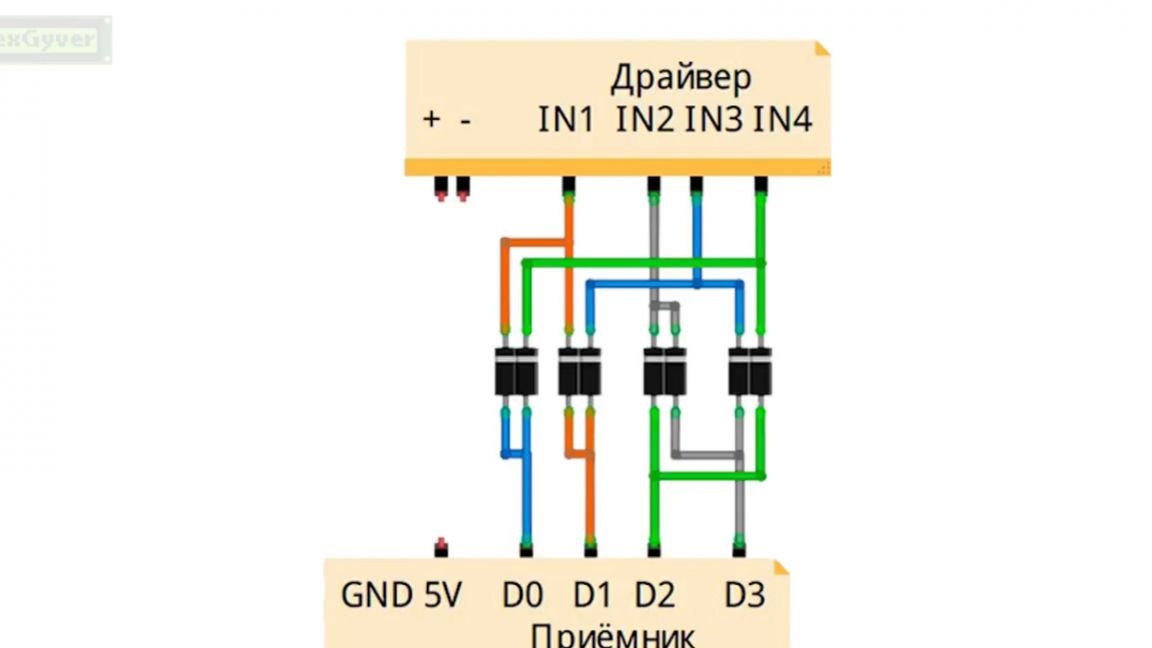
Circuitos para canais separadamente funcionam bem, mas quero tudo de uma vez. É óbvio que é simplesmente impossível pegar e conectar todos os fios como estão, pois os canais de controle interferem entre si e os motores simplesmente não giram, se nada mais queimar, é claro. Precisamos proteger os canais de controle contra influência e circuito mútuos. E então os diodos comuns que passam a corrente em apenas uma direção serão resgatados.

E desta forma, o circuito já pode ser combinado. Estamos otimizando-o levemente para compactação e maior visibilidade, bem, resta conectar a energia, por exemplo, de baterias e motores de dedos, podemos adicionar um interruptor, mas, infelizmente, não foi tão simples.
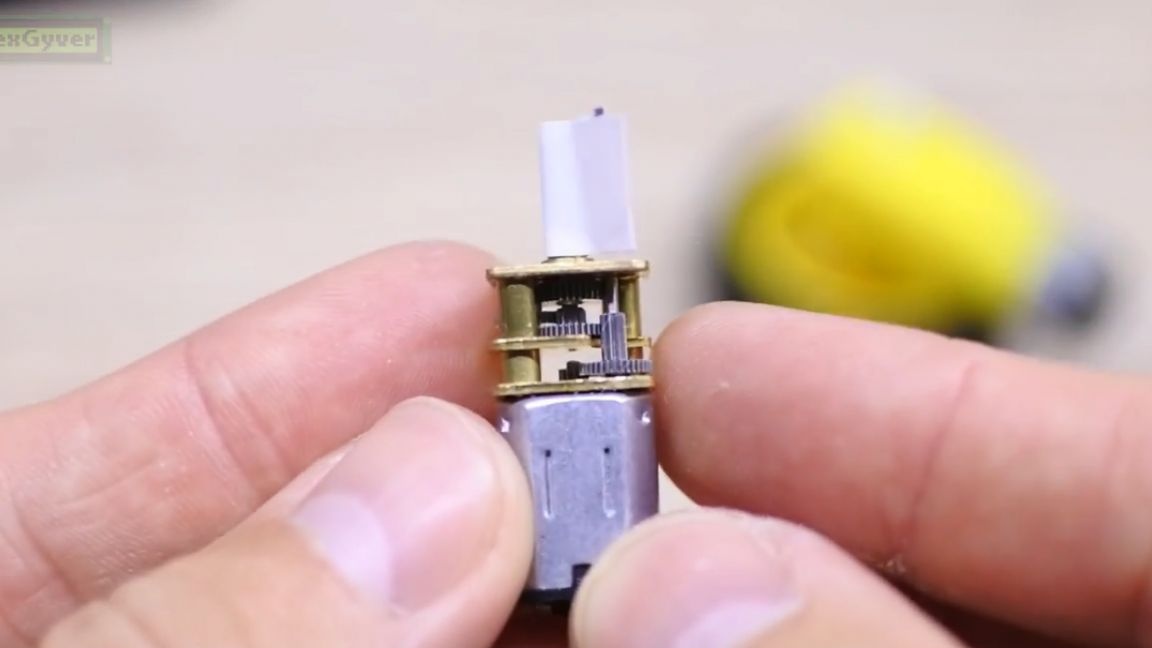
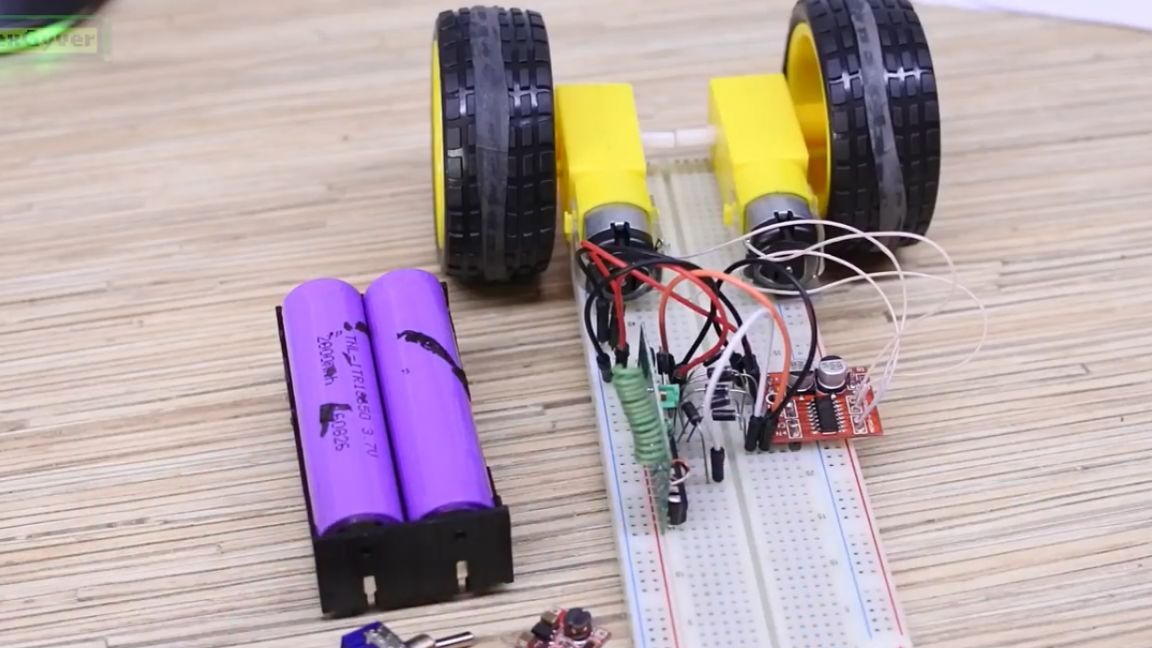
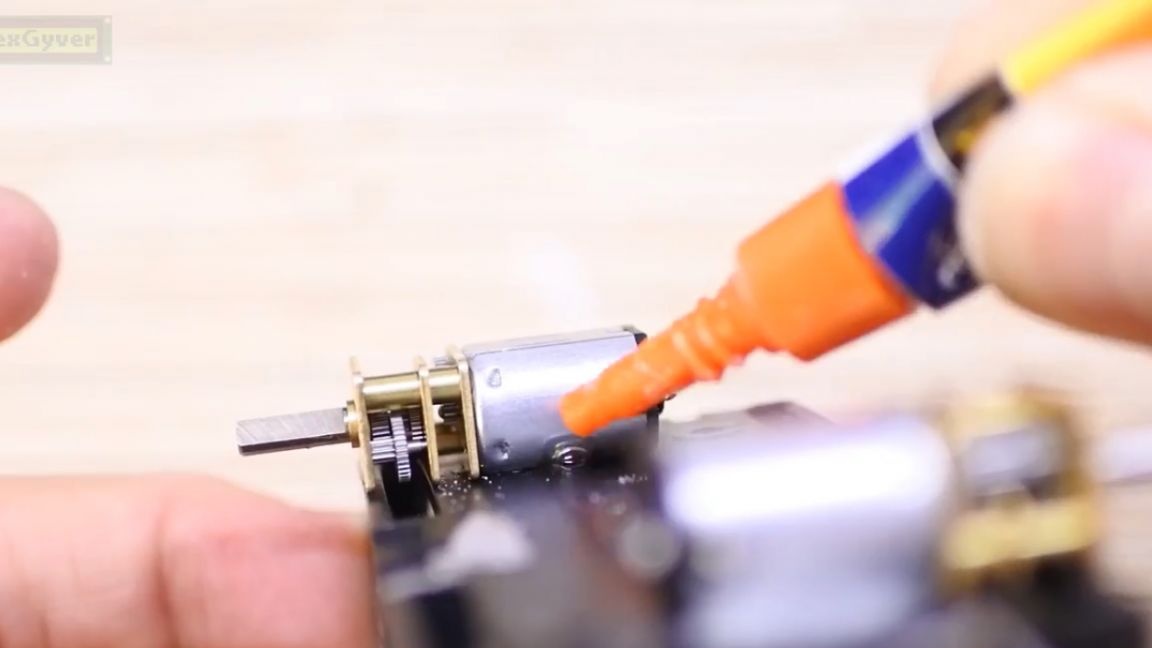
Os chineses têm maravilhosos motores de engrenagem prontos para robôs caseiros. Eles são vendidos imediatamente com rodas. E existem micro-motorredutores, nós os usaremos como queremos fazer um mini robô espião.

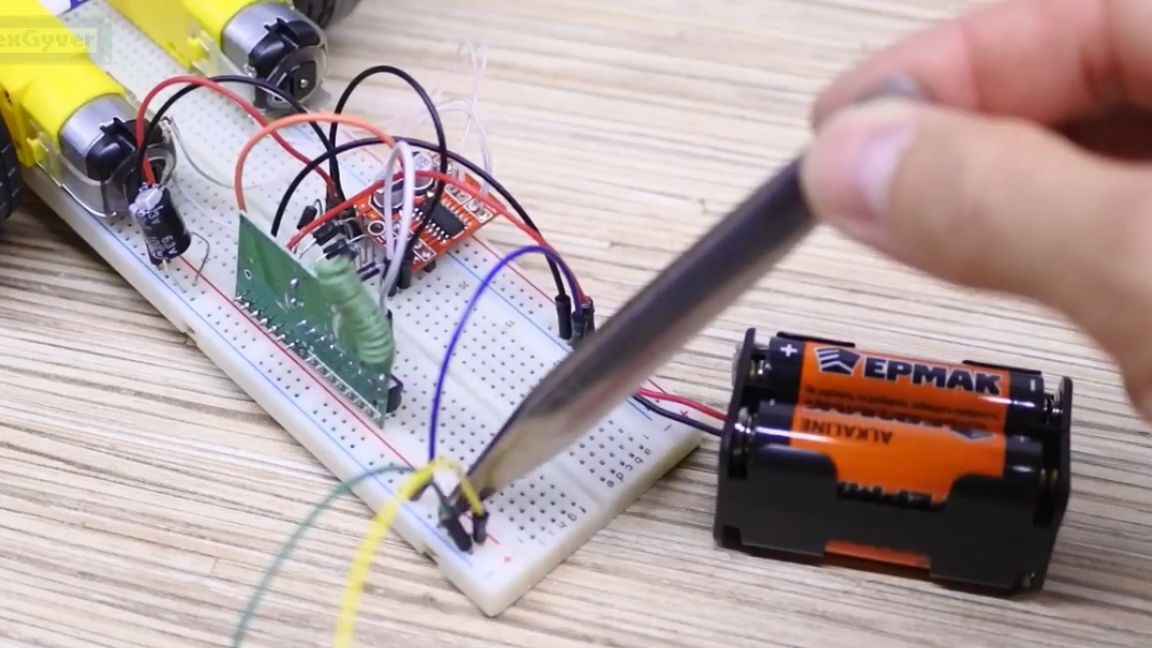
Mas, para o primeiro teste, vamos soldar motores grandes e, para testar, montaremos o circuito em uma placa de ensaio. Tomamos diodos e conectamos tudo de acordo com o esquema.
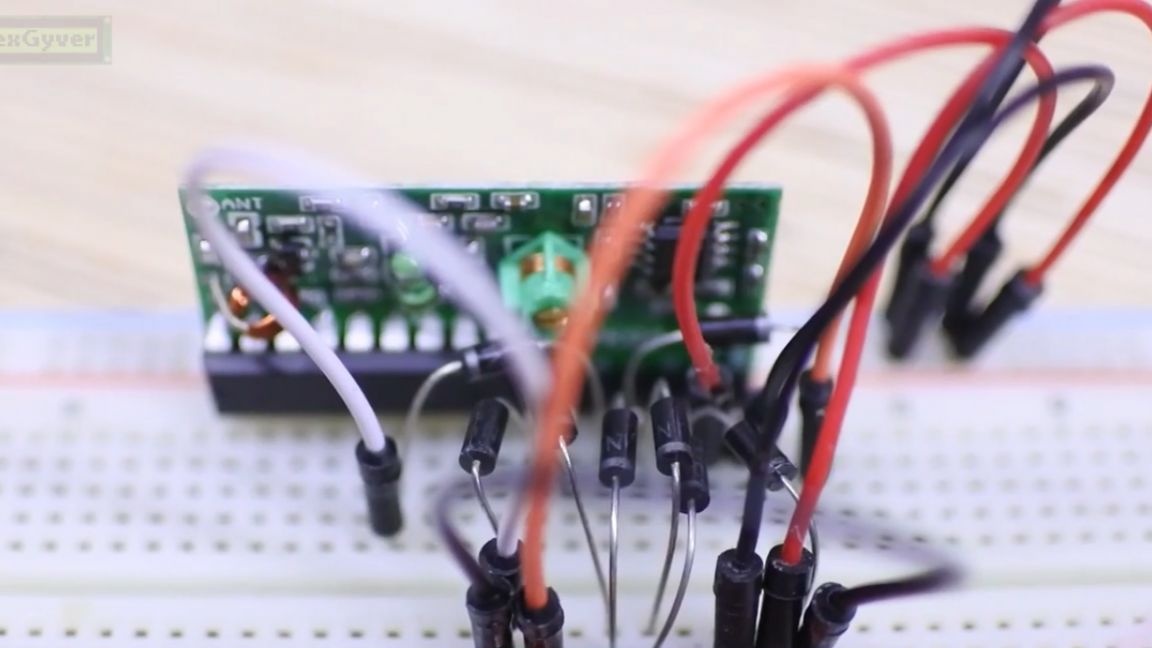
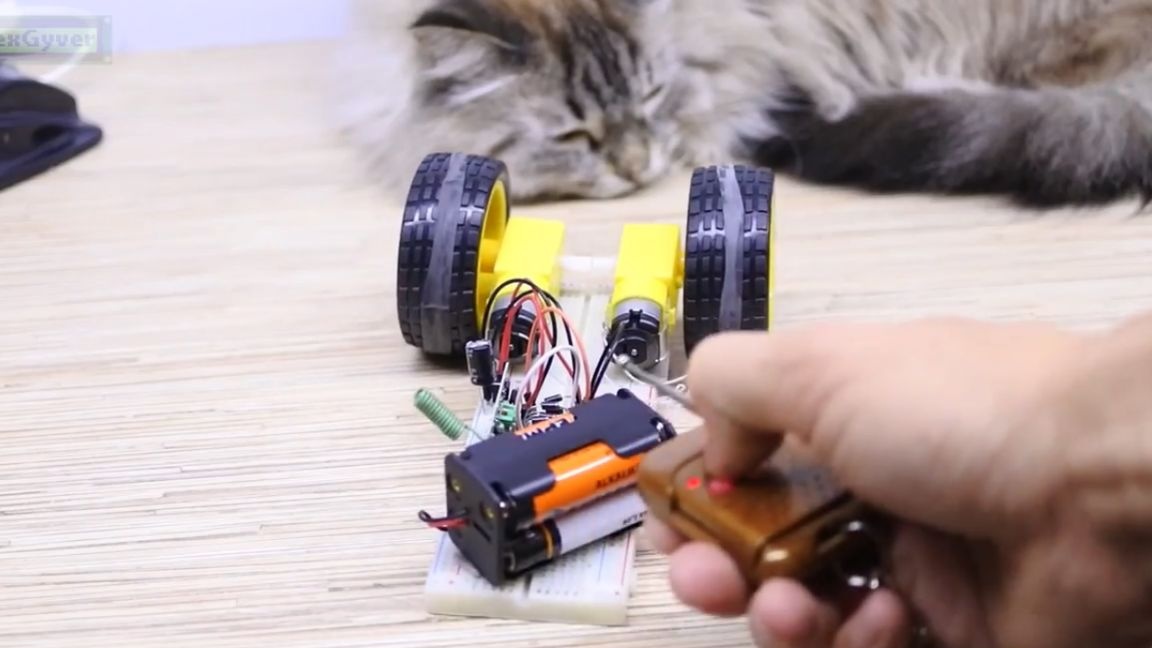
Bem, algo assim. Fixamos as rodas do motor em fita dupla face de acordo com o princípio e isso será feito - esse é o mesmo layout.
Vamos comer com 4 pilhas de dedo. Puxe imediatamente as rodas dos pneus antiderrapantes dos anéis da câmara da bicicleta. Vamos lá!

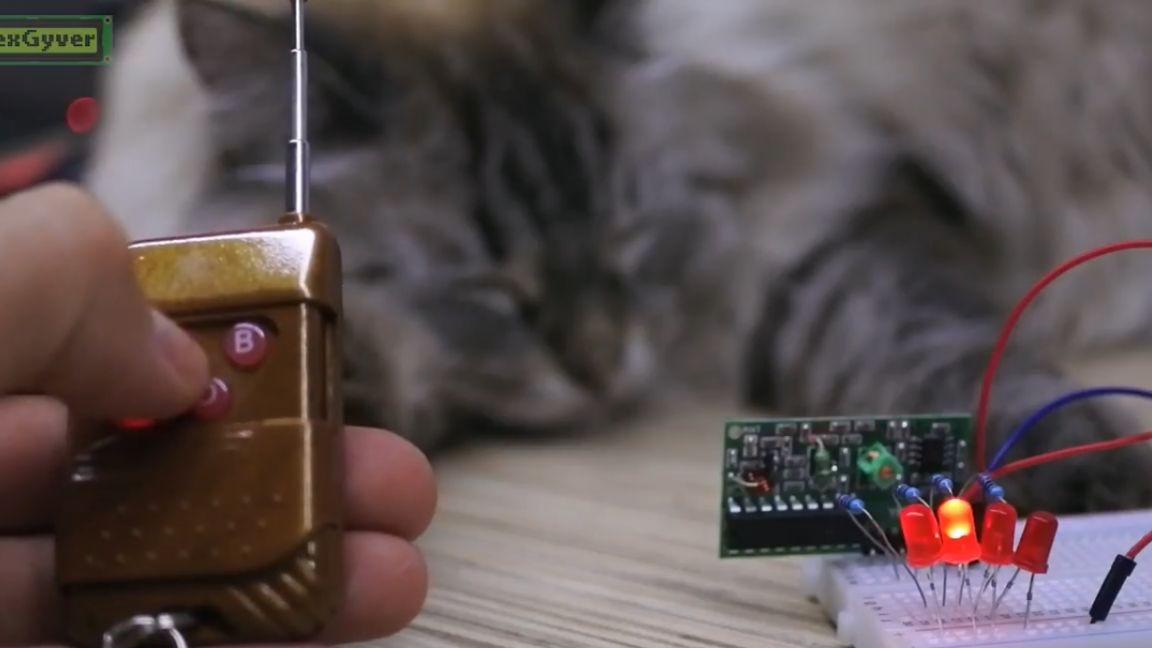
Mas os esquis não andam.Enquanto pressiona o botão, a máquina se move rapidamente e, no teste com LEDs, vimos que o sinal é constante sem solavancos, ou seja, pela lógica, a máquina deve funcionar exatamente enquanto o botão é pressionado, mas por algum motivo isso não acontece. Vamos acertar. Para começar, os chineses soldaram a antena ao transmissor e não soldaram ao receptor. De fato, a antena não está na forma de uma trilha no quadro:
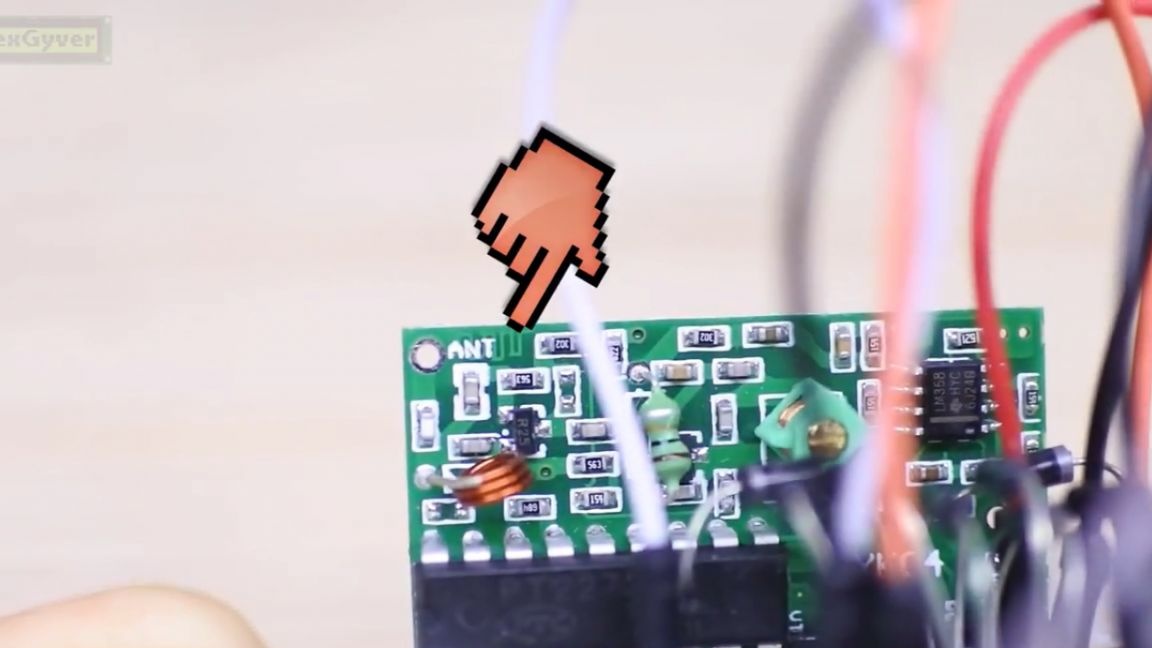
Mas a antena é o caso quando o tamanho importa. Vamos fazer a nossa antena. Para fazer isso, você precisa de uma conexão regular, por exemplo, de um cabo da Internet.

O comprimento da antena é geralmente igual a 1/4 do comprimento de onda, o chamado vibrador de quarto de onda. A radiofrequência do módulo é 315 MHz, convertemos a frequência no comprimento de onda de acordo com a fórmula da escola através da velocidade da luz, dividimos por 4 e resulta 23 com uma cauda de centímetro.
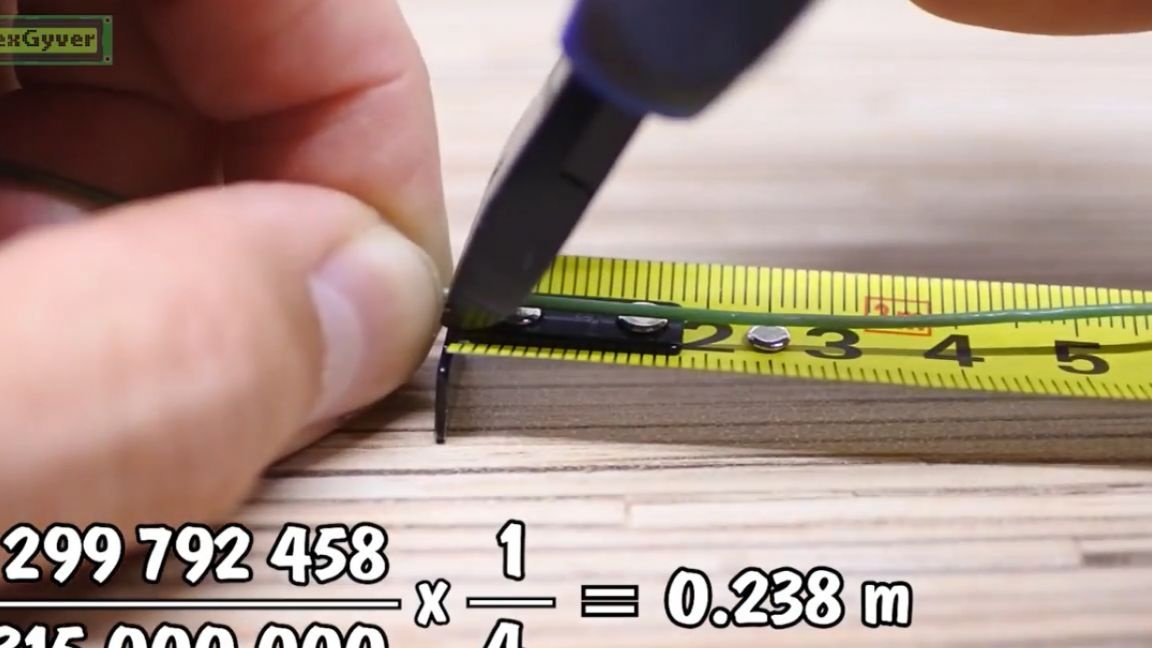
Aqui, a propósito, um tablet da Internet para diferentes frequências.
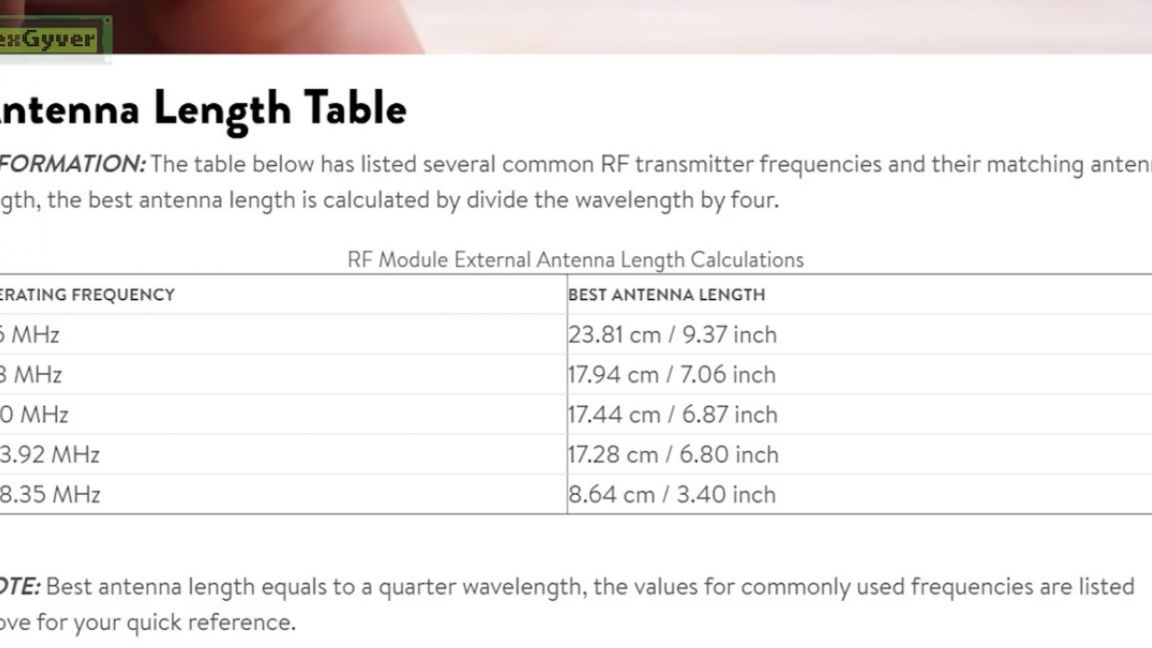
Como você pode ver, estamos fazendo tudo certo. Com essa antena, a nossa o robô Ele não será um espião, porque ficará com um fio de castanho muito longo.

A antena pode ser torcida em espiral. A julgar pela imagem da Internet, você pode enrolá-la em 4 mm.
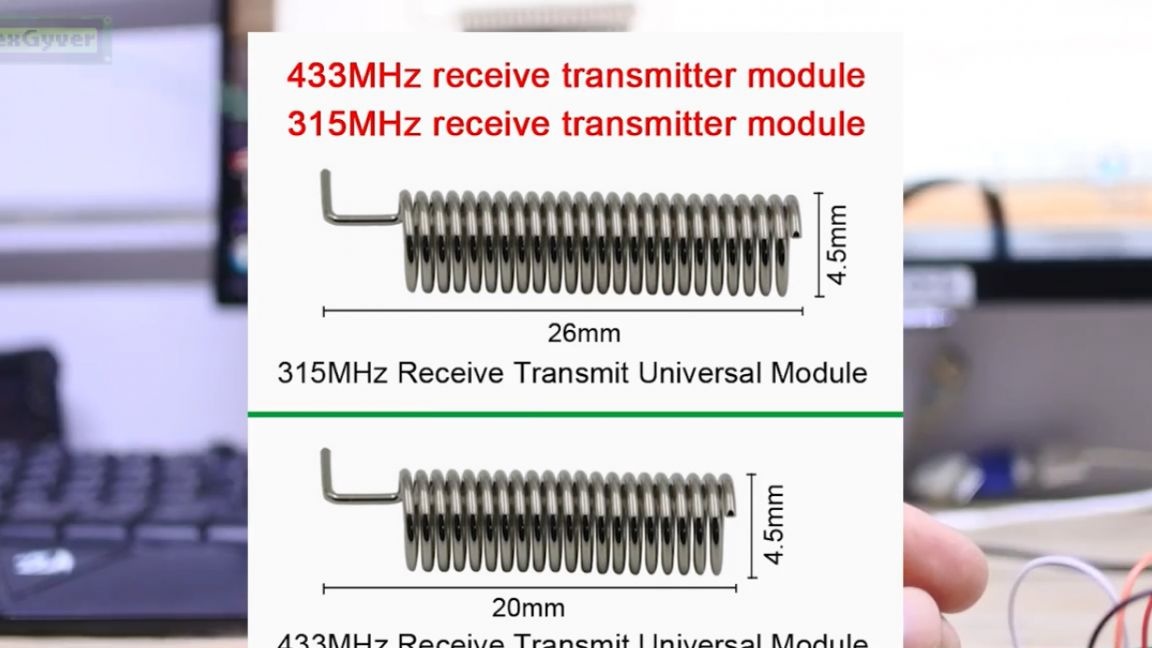
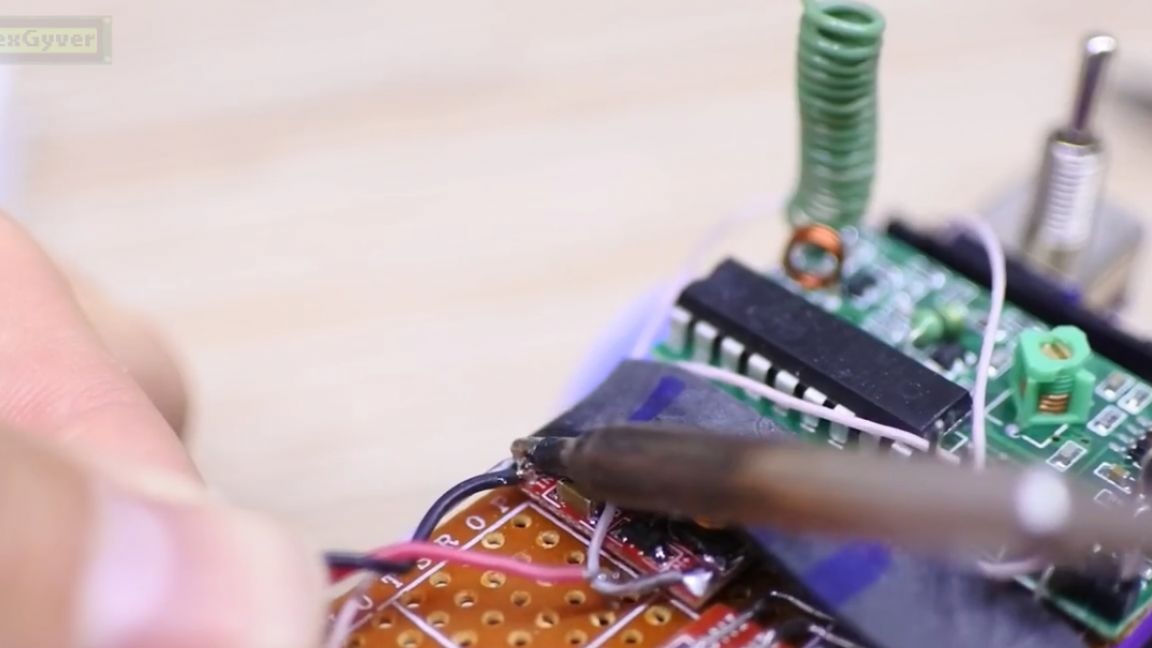
Faça uma broca com o diâmetro apropriado e enrole nossa antena nela, e depois solde-a na placa.
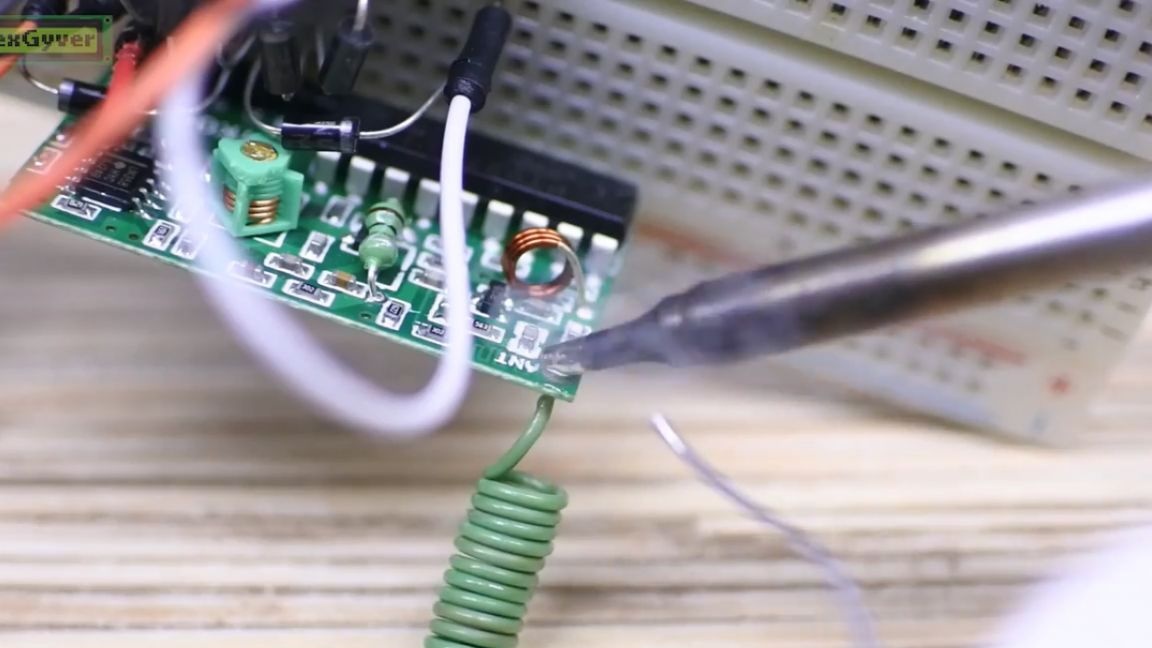
Para lidar com uma corrente de partida alta, um capacitor nos ajudará em paralelo com a fonte de alimentação.
Nós verificamos.
Perto da antena, o circuito funciona de forma estável. Provavelmente, o problema ainda está na fonte de alimentação, há interferência dos motores, uma vez que, com a fonte de alimentação separada dos motores e do receptor, o circuito funciona conforme o esperado.
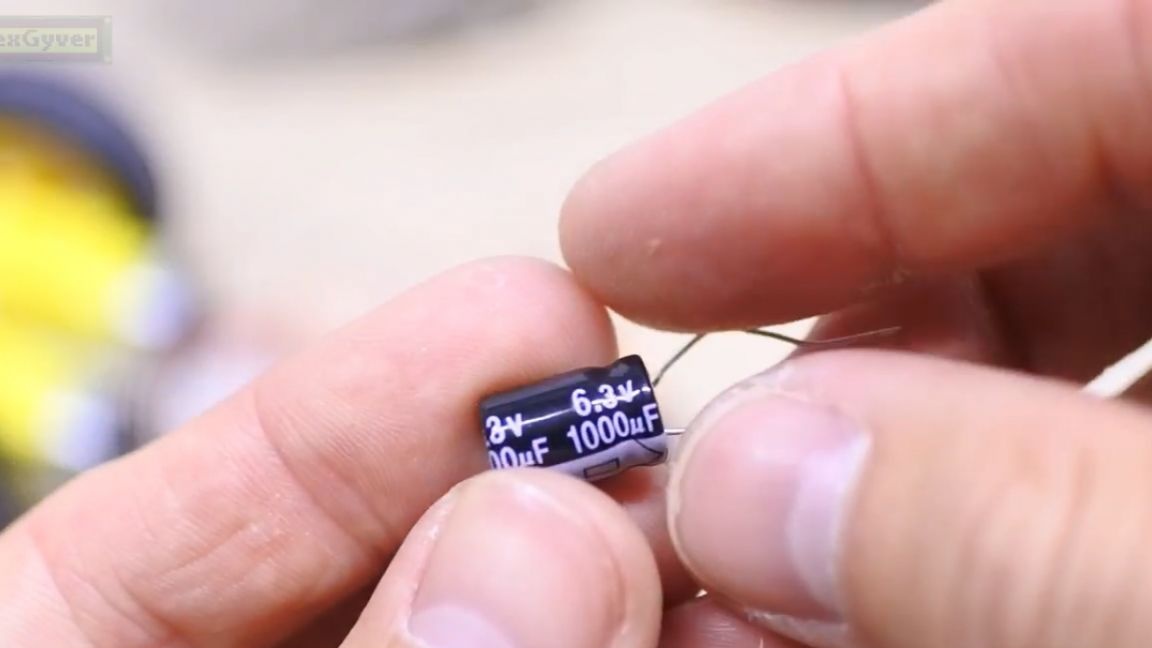
Adicione capacitores eletrolíticos e cerâmicos para suavizar os choques iniciais.
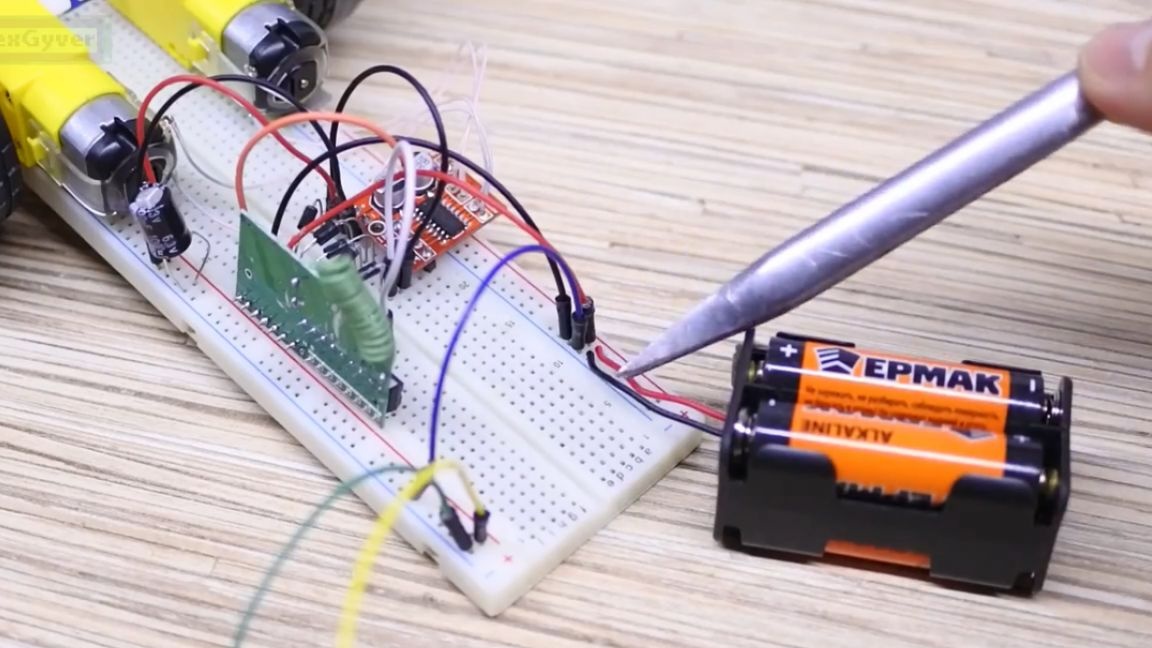
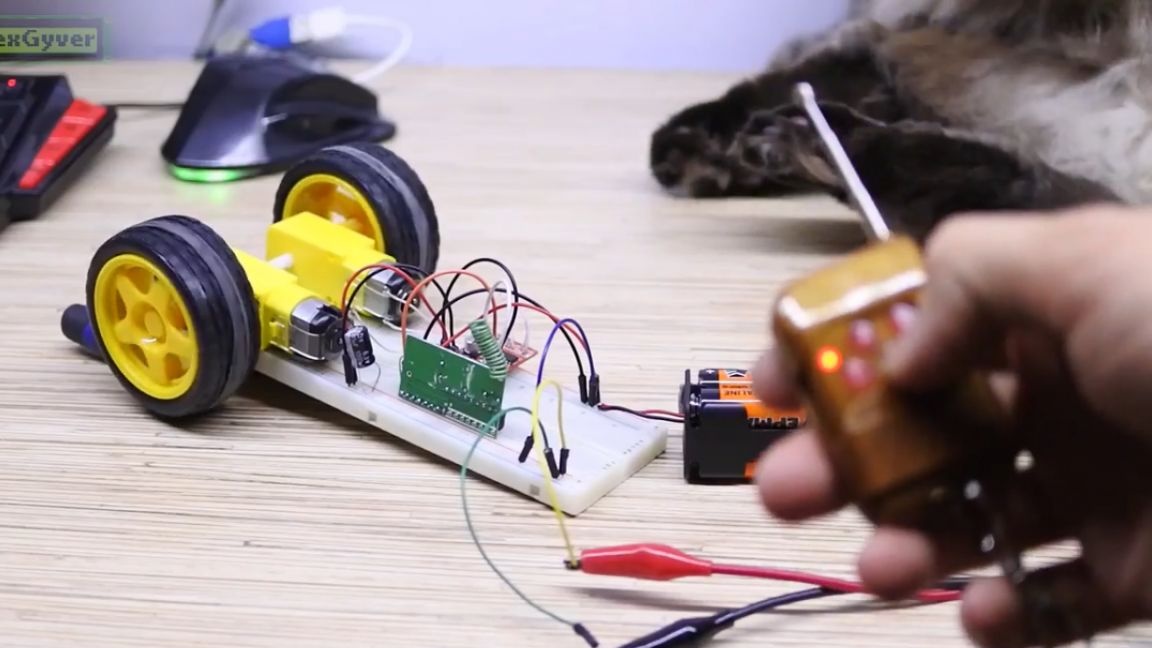
Mas ainda assim, nada aconteceu. Faremos refeições separadas. Uma bateria de lítio 18650 alimentada por motores e outra alimentada por rádio. Também colocaremos um conversor de impulso de até 5V, porque o rádio funciona a partir de 5V, a bateria não funciona mais. Para ligar a alimentação, pressione uma chave seletora dupla.
Todos esses componentes são vendidos no Aliexpress. Reconstruímos rapidamente o circuito e verificamos o desempenho.



E droga, isso funciona. Sua atenção é apresentada à máquina caseira mais simples e barata, com controle remoto. Sobre a potência do módulo de rádio, o autor ainda colocou alguns capacitores. Funciona perfeitamente.
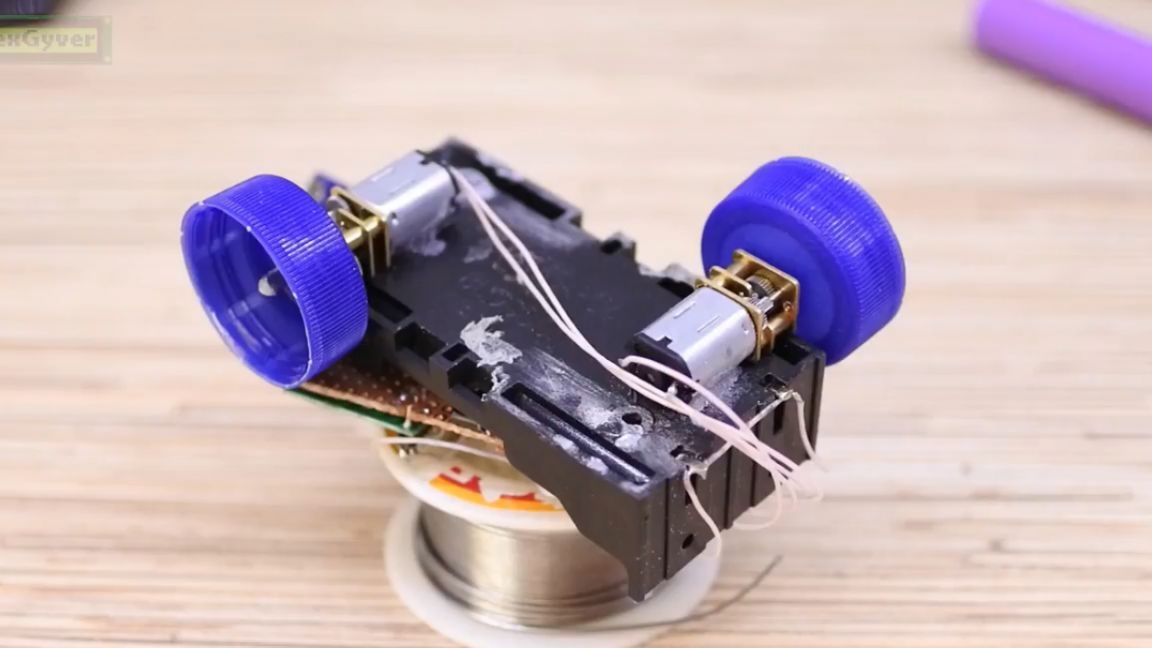
Nosso robô será construído com base no compartimento da bateria e em pequenos motores. O circuito é exatamente o mesmo de antes, mas por conveniência, vamos montá-lo em uma tábua de pão.

Esta montagem, em princípio, é simples.
Em seguida, pegue pequenos motores e cole no compartimento da bateria. Nós curamos supercola com bicarbonato de sódio comum, ele endurece imediatamente e forma um polímero muito durável, que é fixado com muita firmeza.

As rodas são tampas de garrafa comuns.

Faremos as rodas motrizes na diagonal, será mais compacto e a máquina girará melhor, mas superará os obstáculos ainda mais.
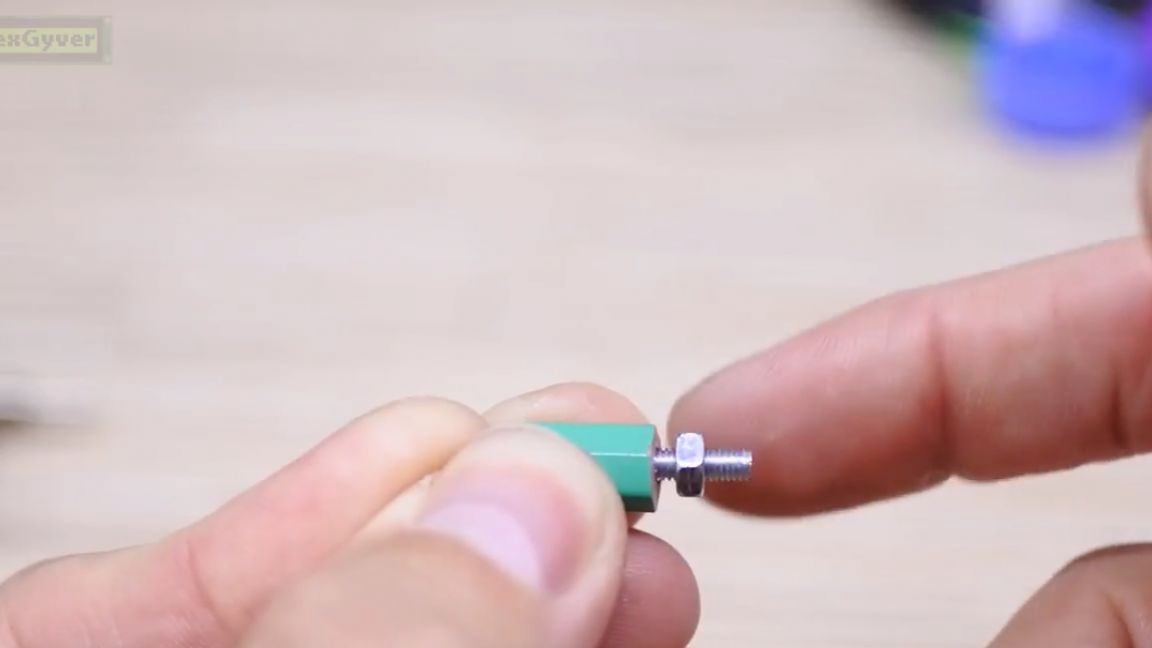
Também precisamos de mais 2 rodas que girarão. Prenda-os em uma manga de um lápis, ele se encaixa bem no tamanho. O eixo será do parafuso m3, então perfuramos um orifício de 3 mm, montamos e colamos na supercola.

Certifique-se de fabricar pneus a partir de uma câmera de bicicleta, caso contrário ela não funcionará. Colocamos borracha apenas nas rodas motrizes, caso contrário, novamente, ele pode não funcionar.

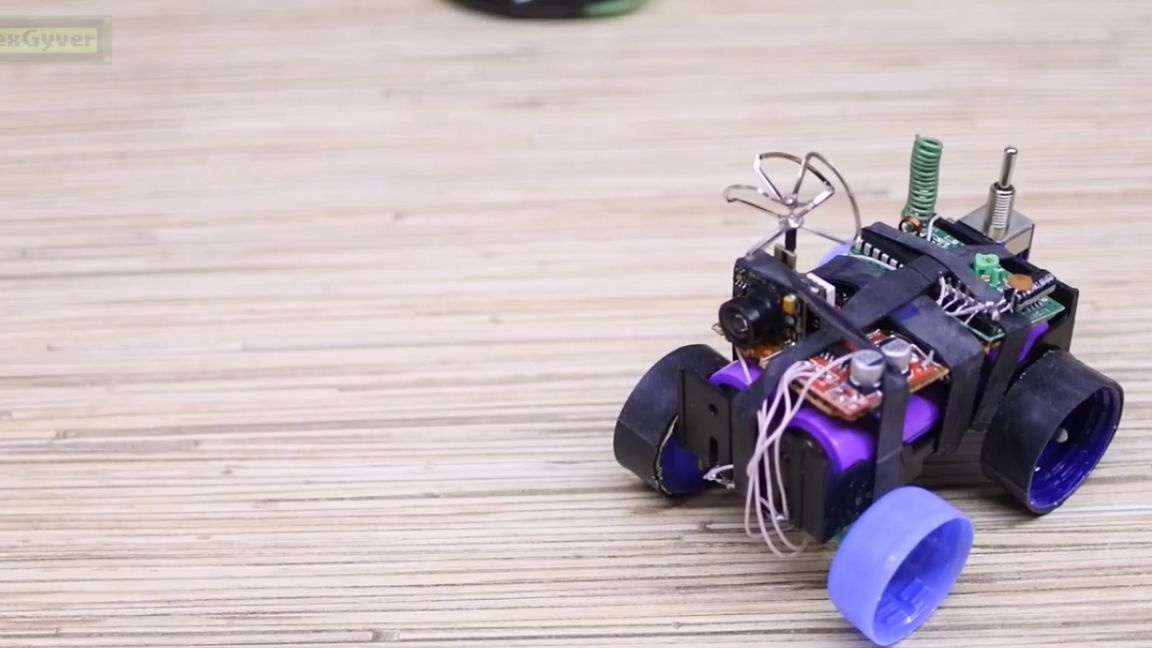
Bem, como está a nossa mini máquina espiã sem uma mini câmera? O autor levou uma mini câmera para um quadrocóptero e o Eachine tx-02 3 em 1 (câmera + transmissor + antena).
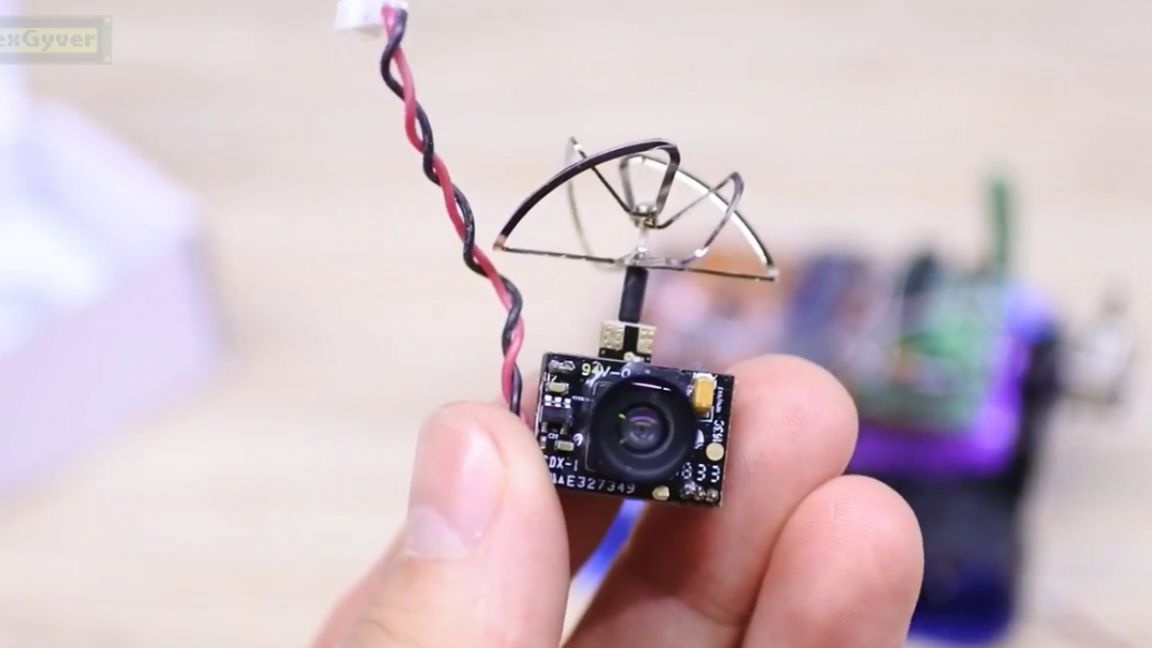
A câmera é alimentada por uma tensão de 3 a 5V e envia um sinal de vídeo a uma frequência de 5,8 GHz. Nós alimentamos a bateria a partir da qual o receptor do controle remoto está ligado.
Assim, os motores não interferem no sinal de vídeo. Prenda à fita dupla face e ao elástico.

Você pode receber vídeo em vários dispositivos chineses diferentes. Há uma tela tão legal com um receptor embutido e uma bateria embutida. Você também pode inserir um cartão de memória e gravar o que a câmera leva.
O autor, infelizmente, não tem um, mas a coisa é realmente legal e confortável. A segunda opção é um pouco menor, mas exatamente o que você precisa para o nosso carro espião é direto.


Este é um pequeno monitor com receptor e bateria, e não apenas um monitor, mas um relógio com um monitor de 2 polegadas. As tabelas de canais de link de vídeo são codificadas em quatro letras e oito dígitos.
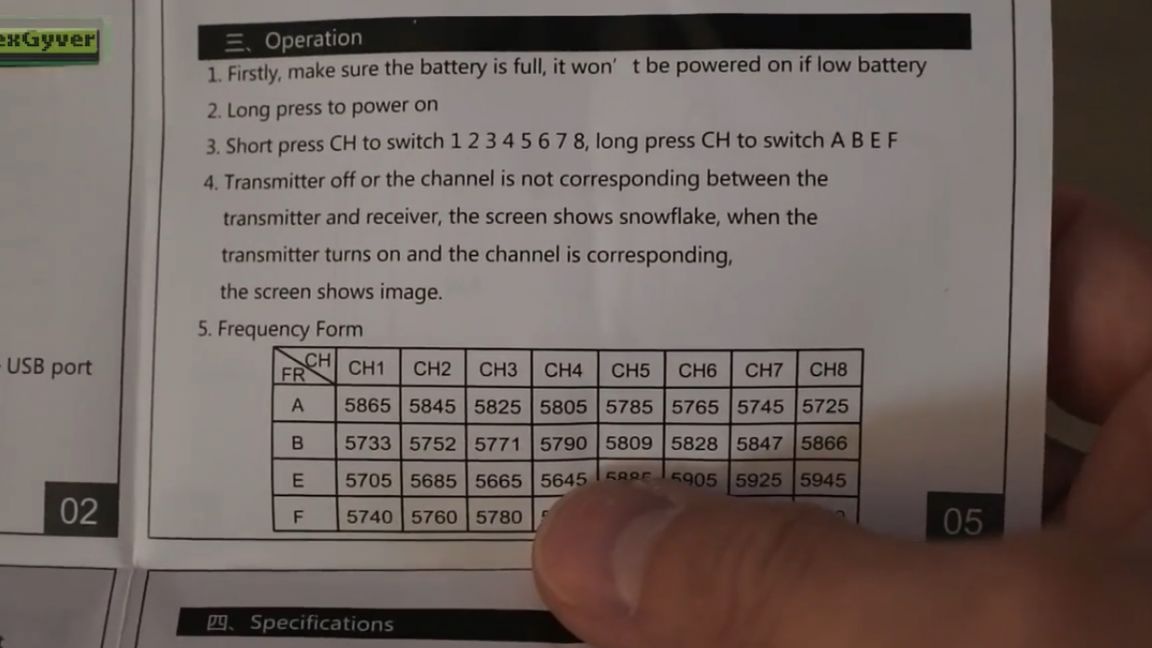
O canal deve corresponder no transmissor e no receptor.No transmissor, temos um canal com o número A8, você pode alterar o botão.

E o relógio tem uma balança. Ao clicar e segurar o botão, você pode definir o número do canal A8.

Tudo, há um contato. Você pode iniciar a vigilância.

A terceira opção, em princípio a mais barata, é um receptor para smartphone, faça o download de um programa especial, abra, conecte, ative, ligue o transmissor de vídeo, pressione e segure o botão no receptor e a varredura de alcance é iniciada.


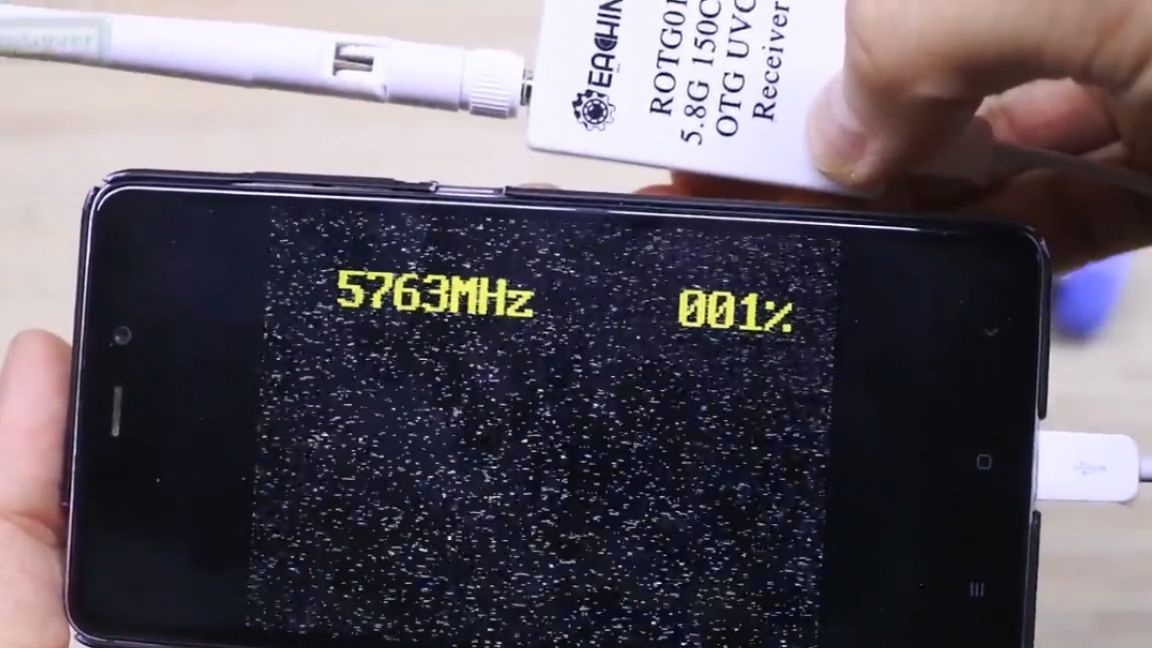
Depois disso, a melhor frequência será selecionada automaticamente e você poderá trabalhar com nosso sistema de vigilância por vídeo.



O mais legal é que você pode gravar vídeo diretamente na memória do telefone.

Isso é tudo por hoje. Obrigado pela atenção. Até breve!
Vídeo: