


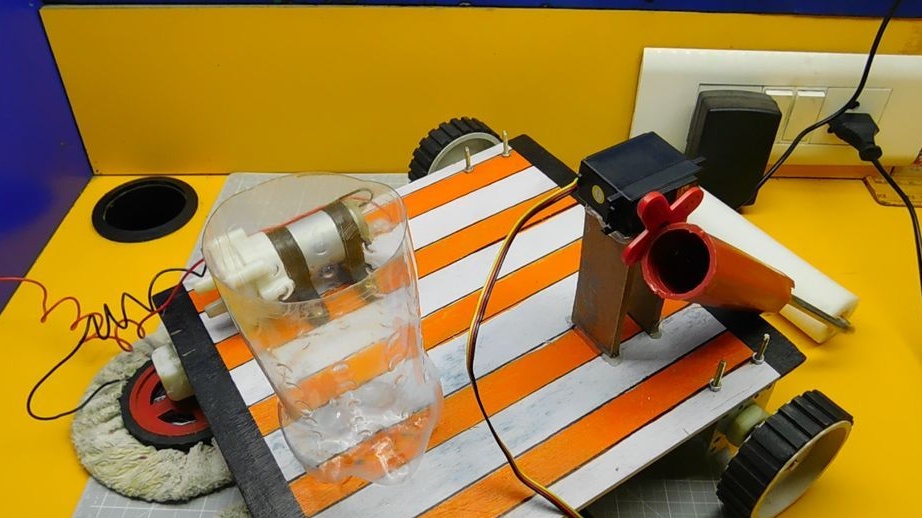
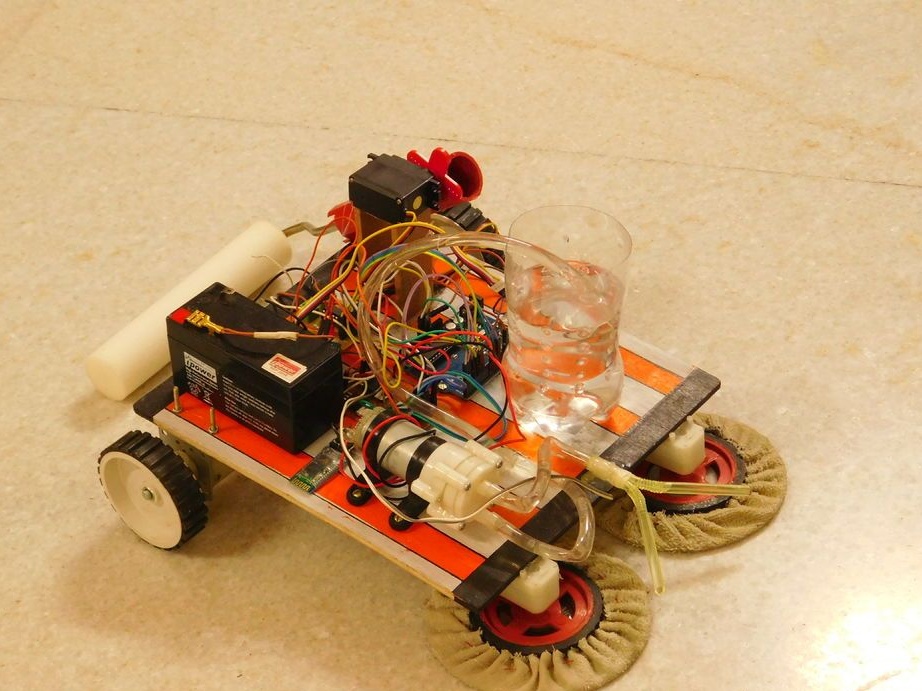
O robôO harvester tem em seu arsenal duas escovas rotativas montadas na frente do eixo do motoredutor. A caixa de velocidades roda a uma velocidade de 75 rpm. O robô tem um tanque de água a bordo. Um rolo é fixado na parte traseira do robô. O robô é misturado com a ajuda de rodas fixadas no eixo do moto-redutor. O limpador é controlado pelo smartphone via bluetooth. No futuro, o Mestre planeja tornar o robô totalmente autônomo. Vamos ver como esse dispositivo funciona.
Ferramentas e materiais:
- Engrenagem do motor 100 rpm -2 pcs;
-Rodas para o motor -2 peças;
-Motor-redutor com uma roda de 75 rpm - 2 peças;
-Arduino ONU;
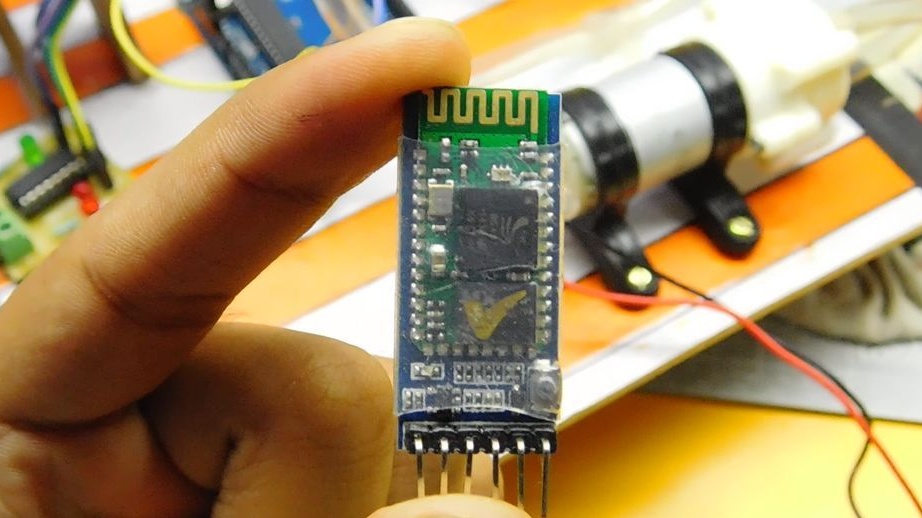
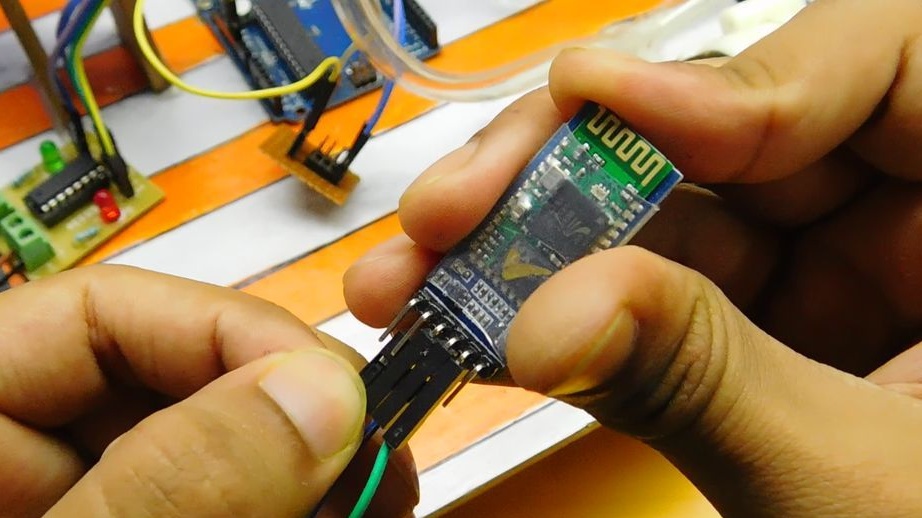
- módulo Bluetooth HC-05/06;
-Driver L293D;
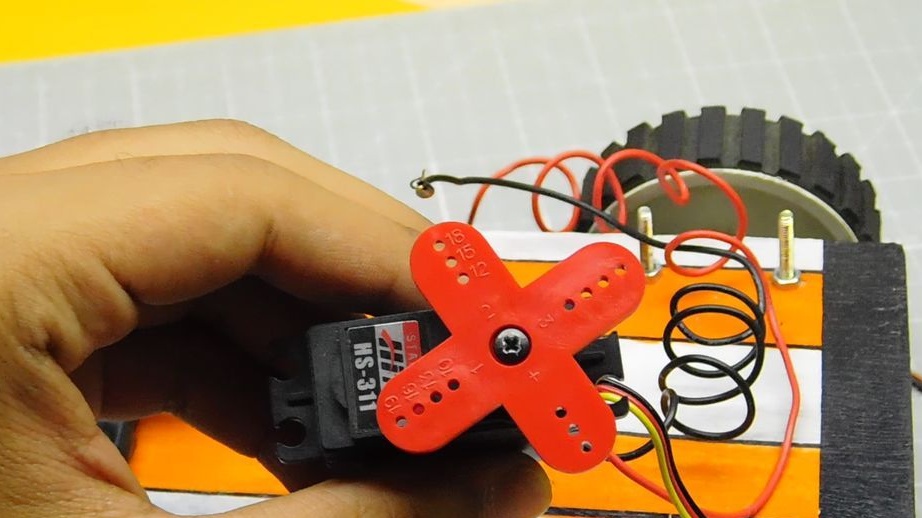
- Servomotor (rotação de 180 graus);
Bateria de -12V;
- bomba 12 V;
Transistor TIP31C;
Transistor TIP122;
- Unidade de CD - 2 peças .;
- rolo de pintura;
- guardanapos de pano;
- Agulha com linha;
-Tube;
Fio;
- Jumpers;
-Placa de montagem;
-Fixadores;
Contraplacado;
Garrafa de plástico;
Ferro de solda;
-Pistola de cola;
-Broca;
- alicates;
-Dremel;
- escova;
-Pintura;
-Marker;
- tesoura;











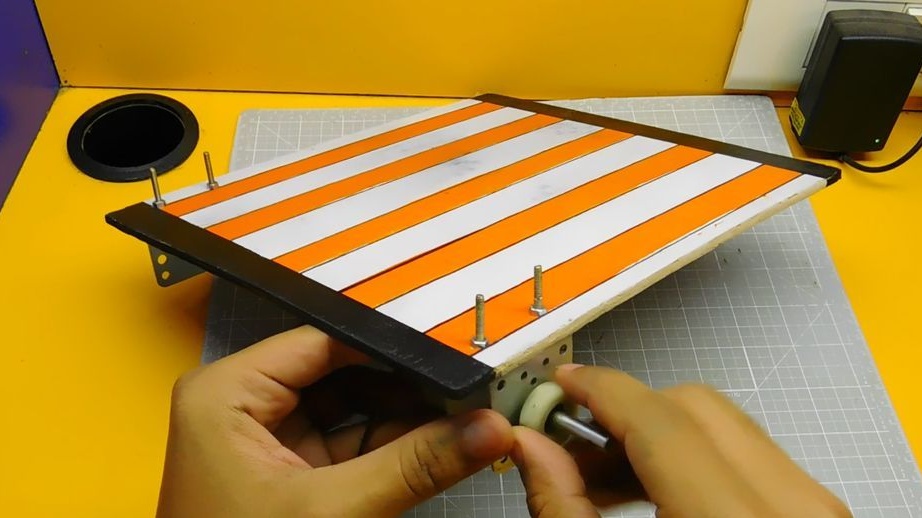
Etapa 1: Fundação
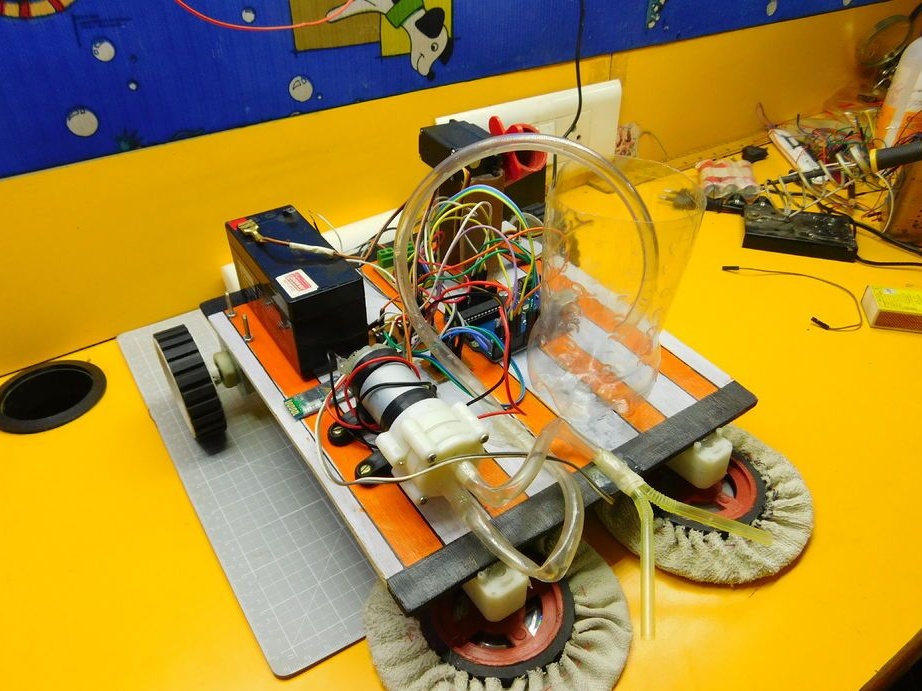
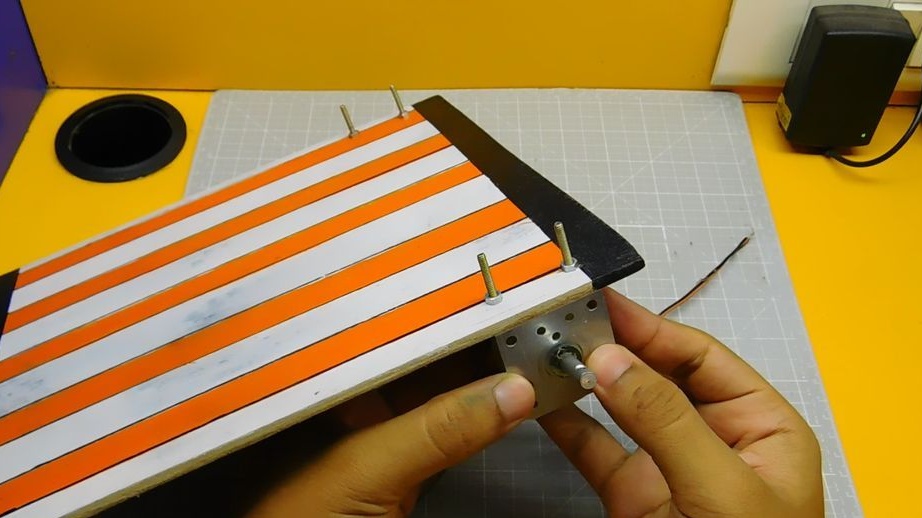
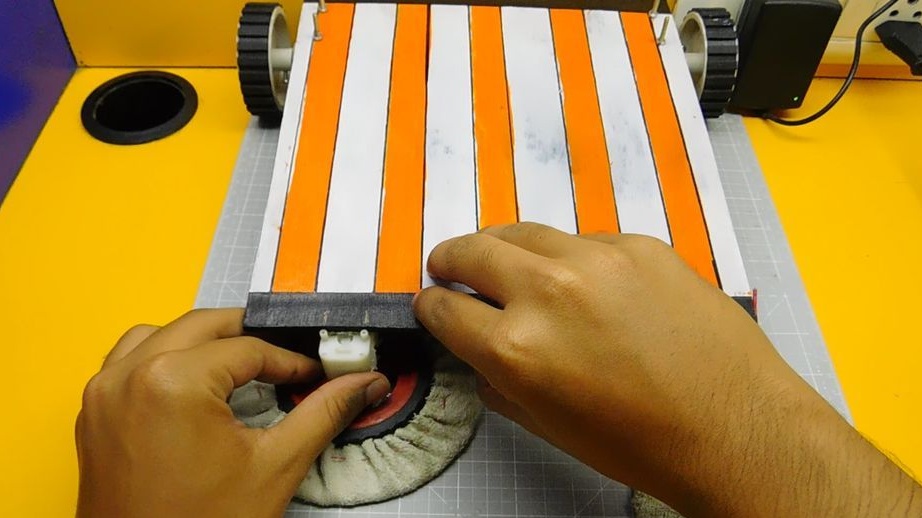
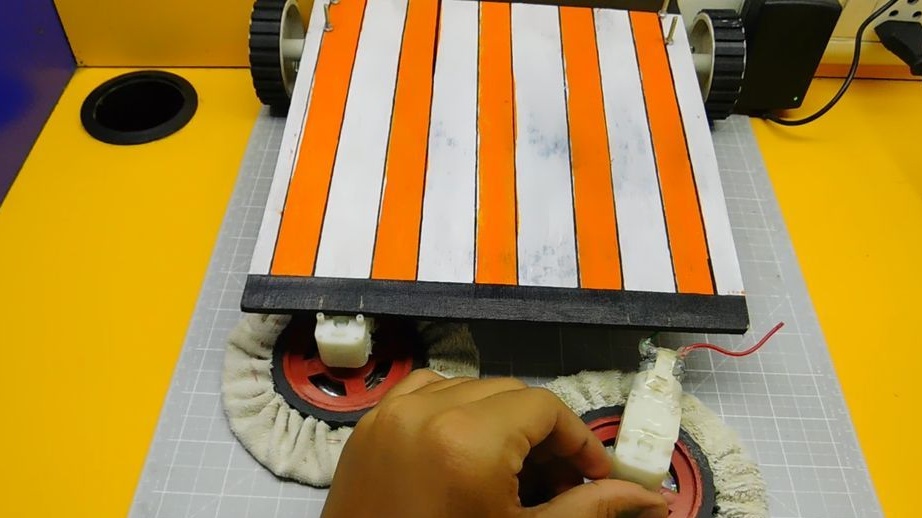
De madeira compensada corta a base. Os tamanhos da base são 30 * 22 cm e pinta a base. Por um lado, conserta o motor da engrenagem. Fixa coaxialmente o motor de engrenagens do outro lado da base.



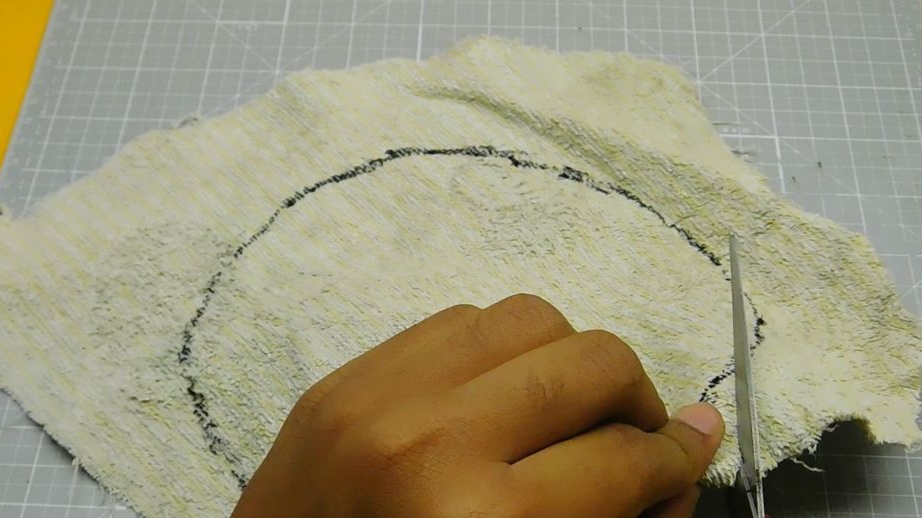
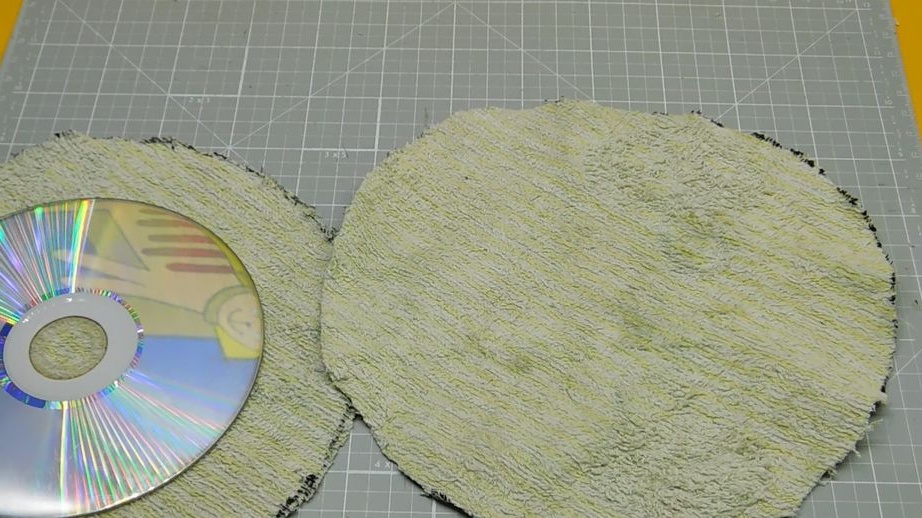
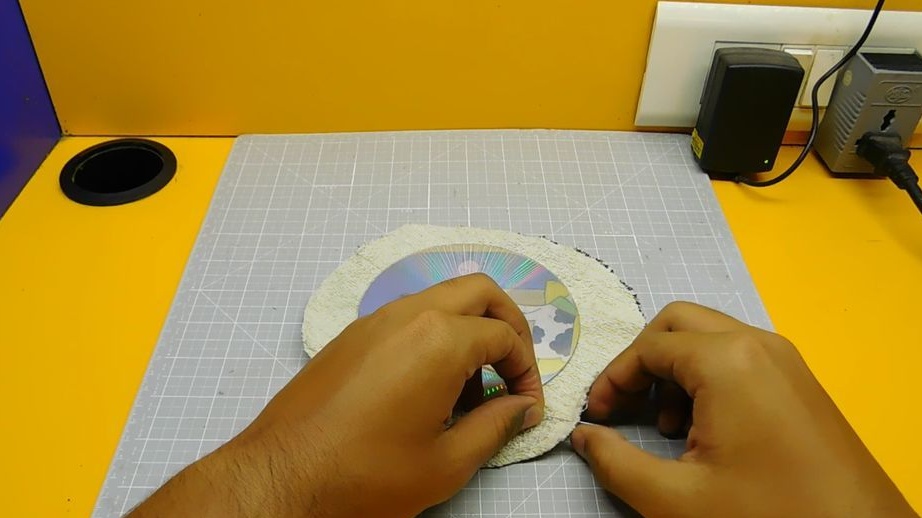
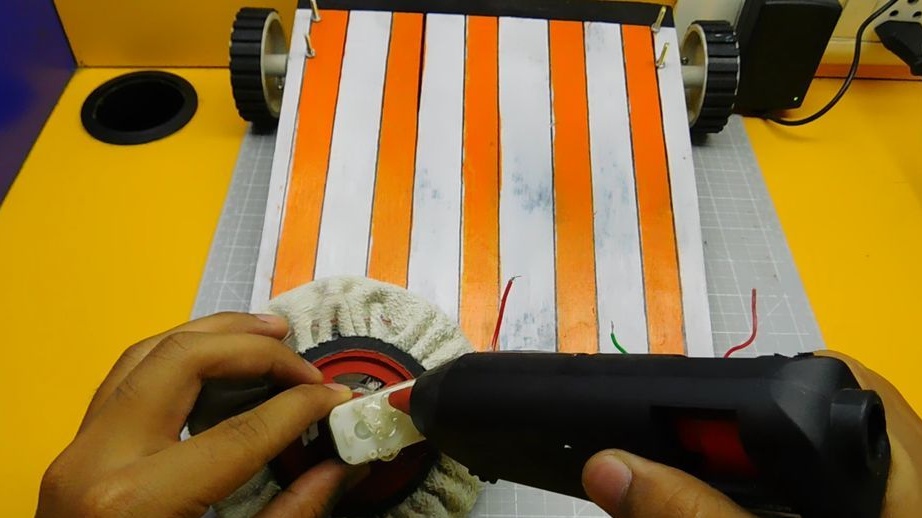
Etapa 2: pincéis
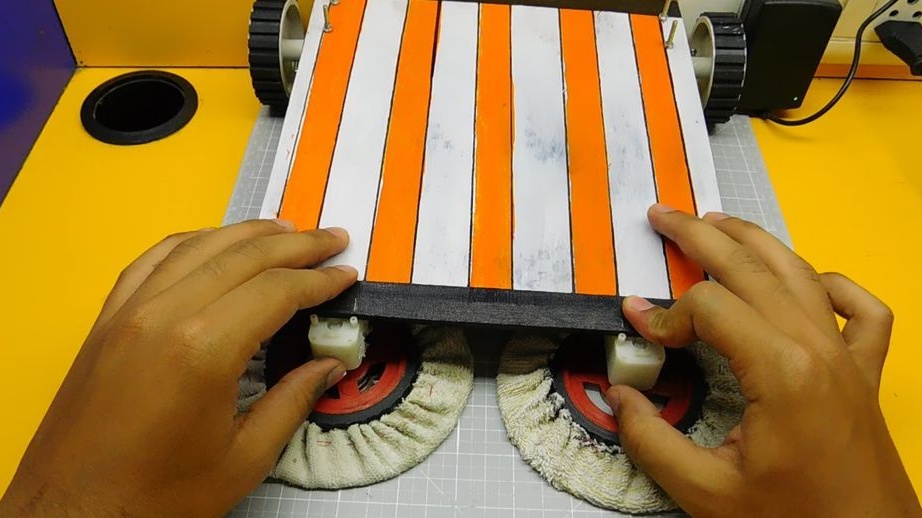
O mestre fez pincéis de CDs antigos. Corte um pano. Embainhou sua unidade. Operação repetida com outro disco. Prenda os discos com adesivo hot melt na roda do motoredutor. Fixou os dois motores de engrenagem em frente à plataforma.








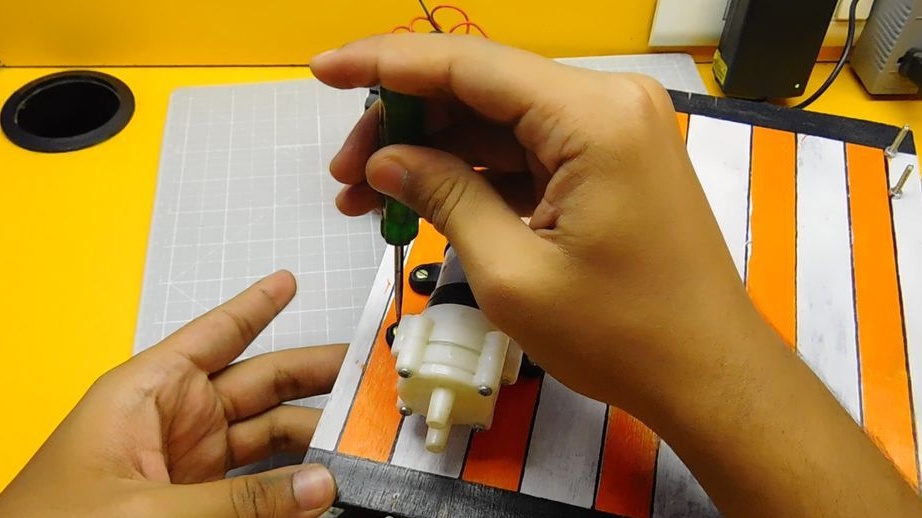
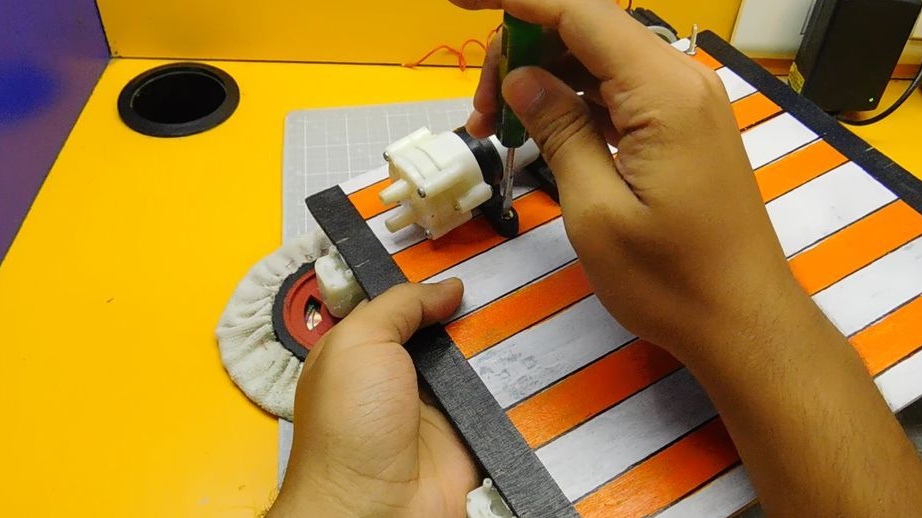
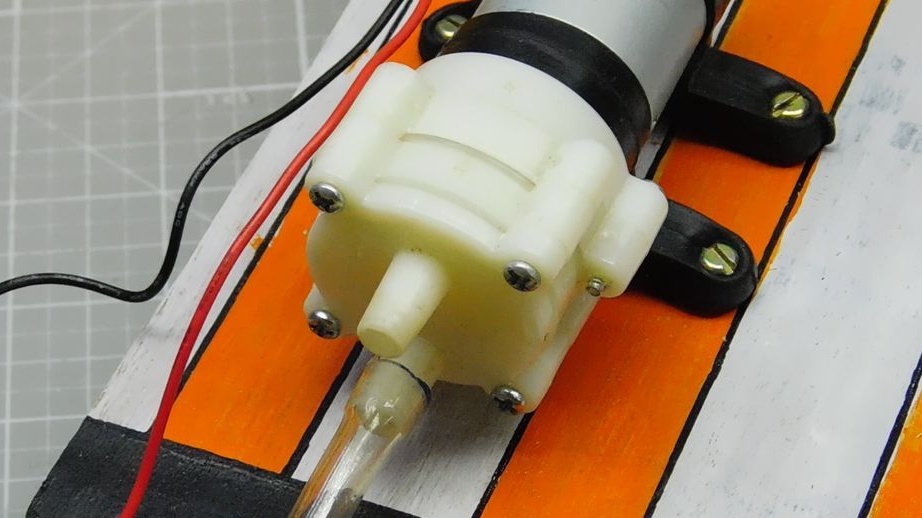
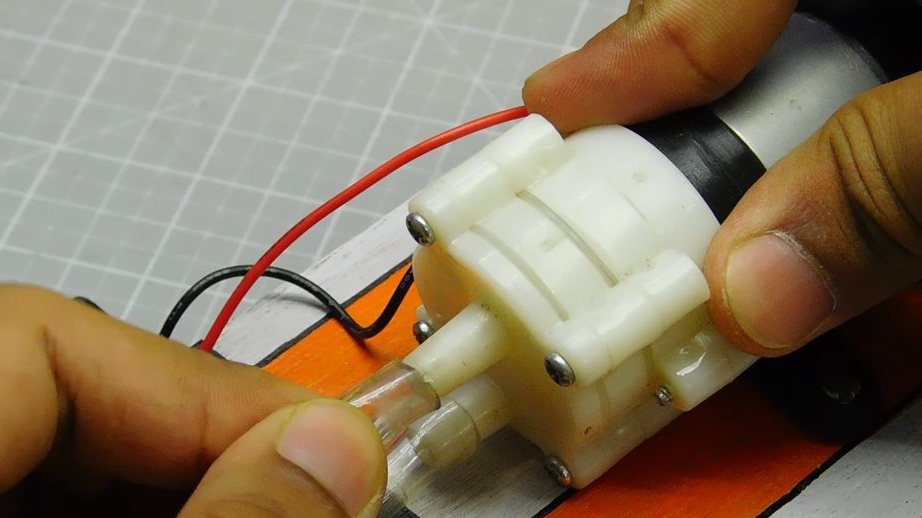
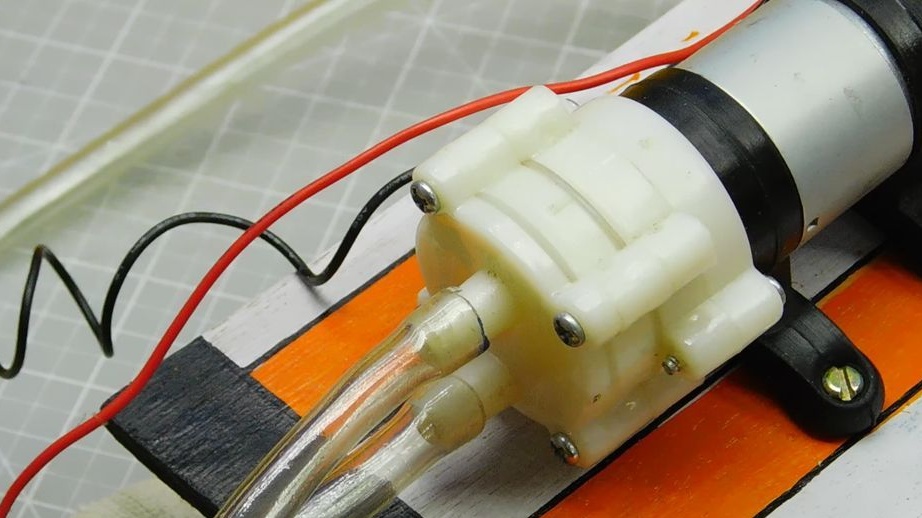
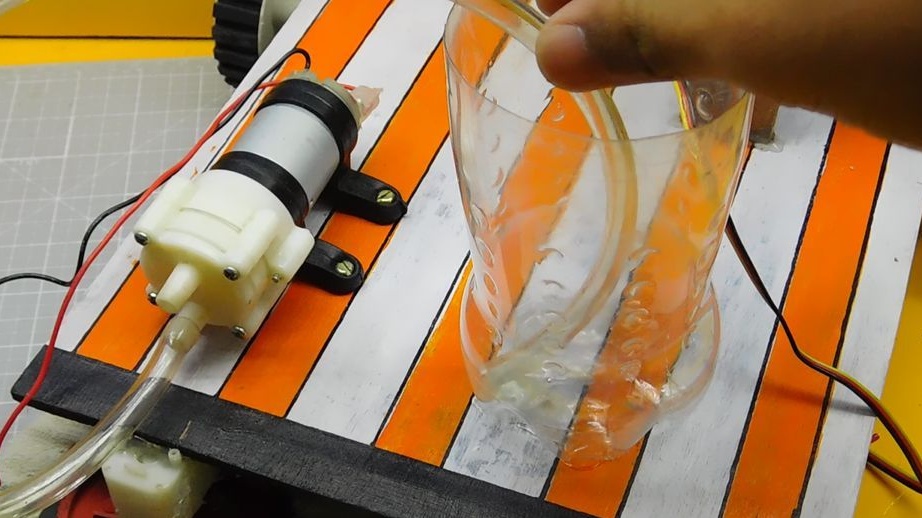
Etapa 2: Abastecimento de água
Prende a bomba na plataforma. Corta a tampa de uma garrafa de plástico. Prende a garrafa na plataforma. Instala um tubo de entrada de água. Posteriormente, o tubo de abastecimento de água para as escovas será consertado.




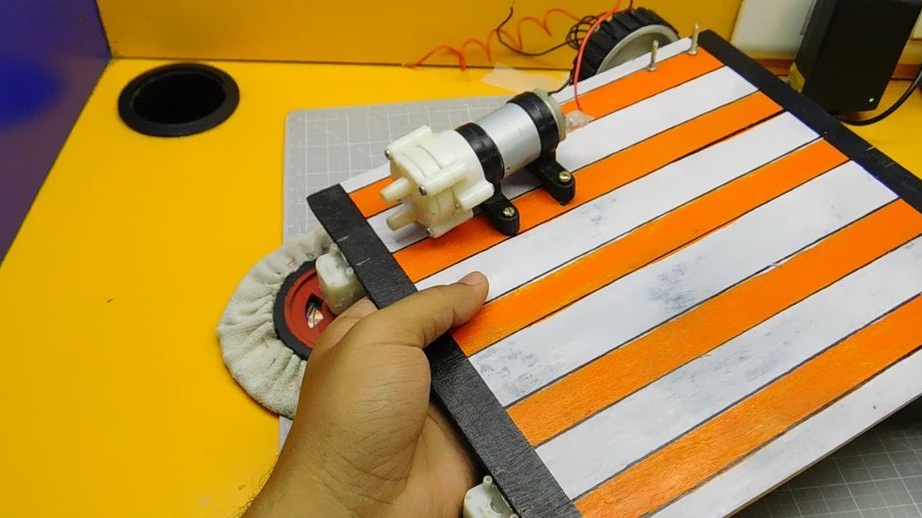




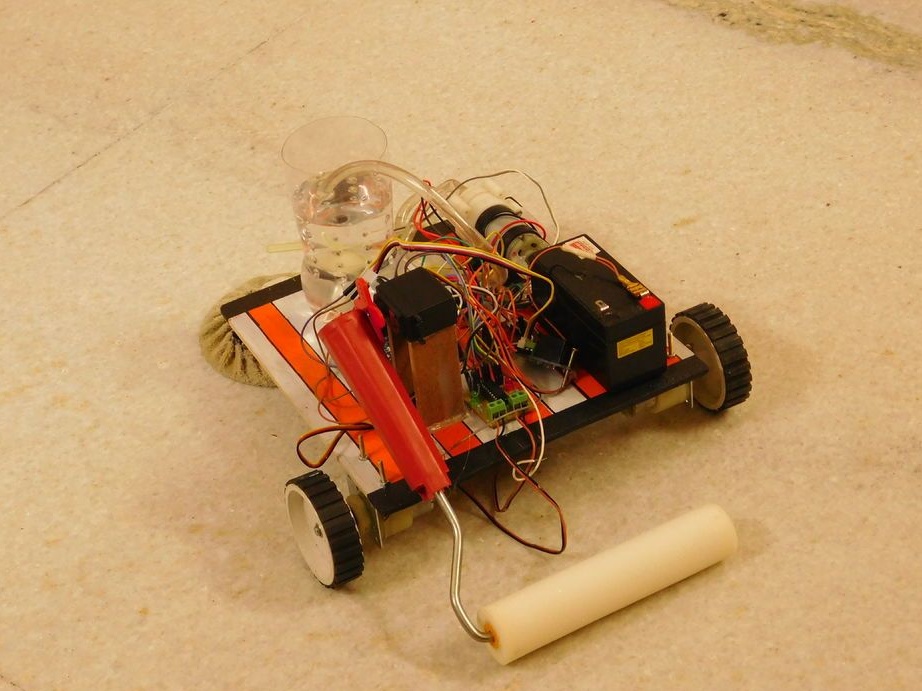
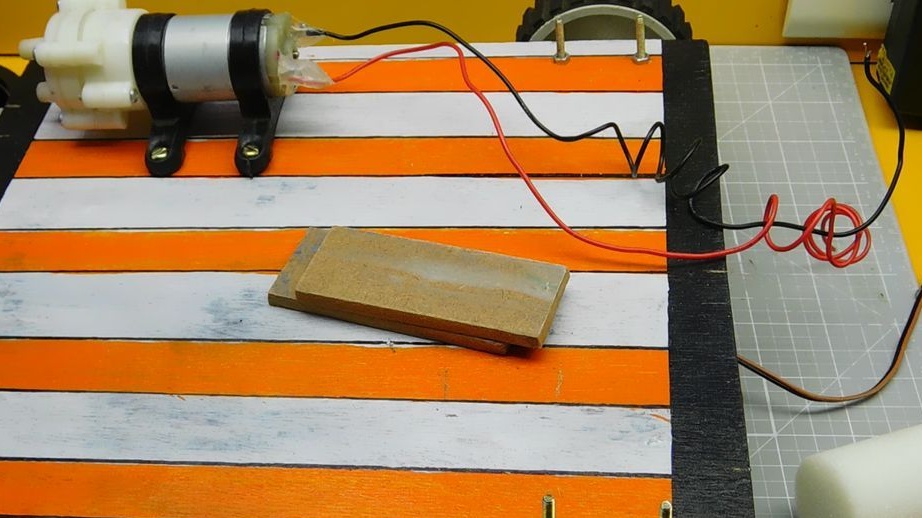
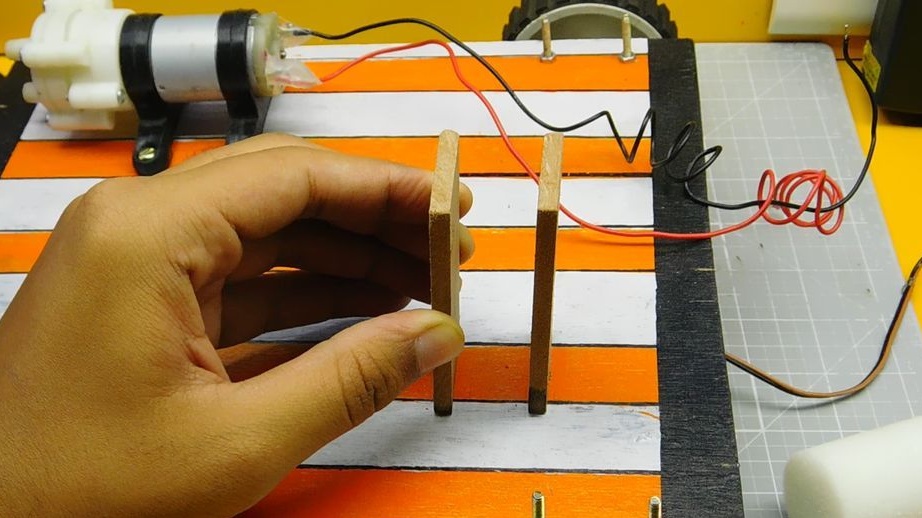
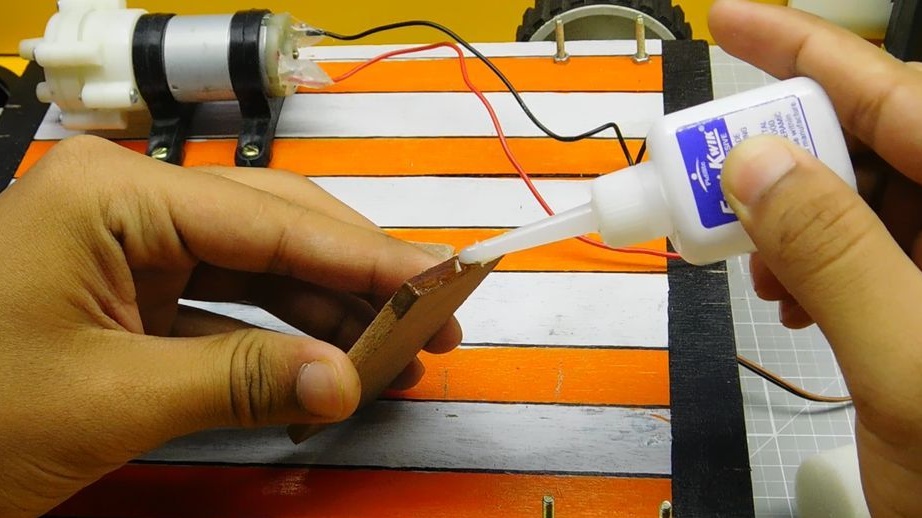
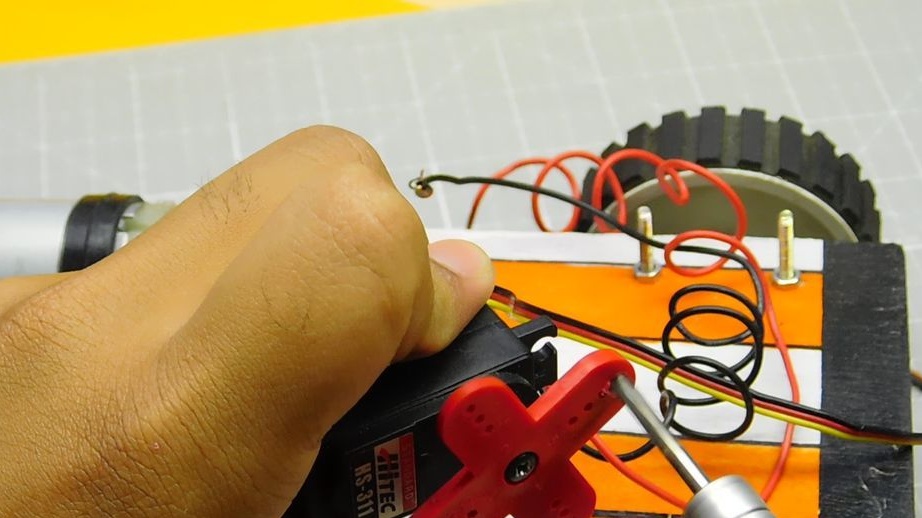
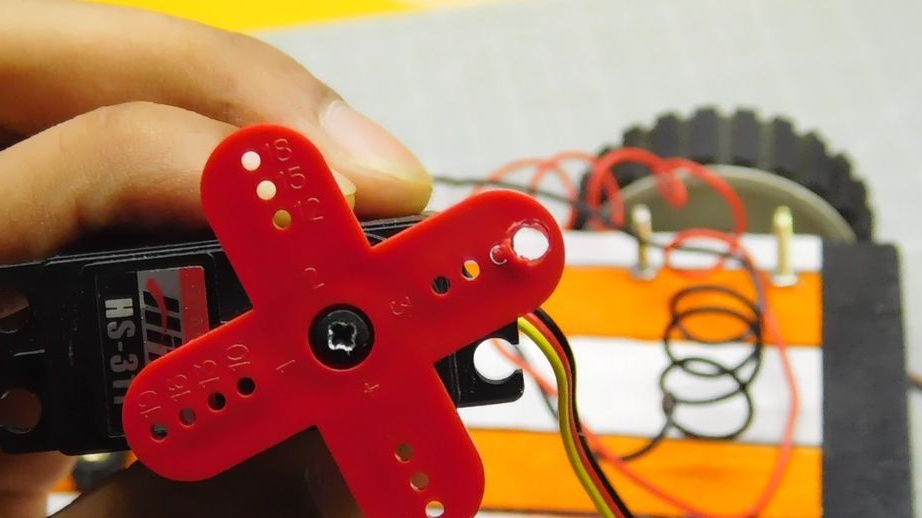
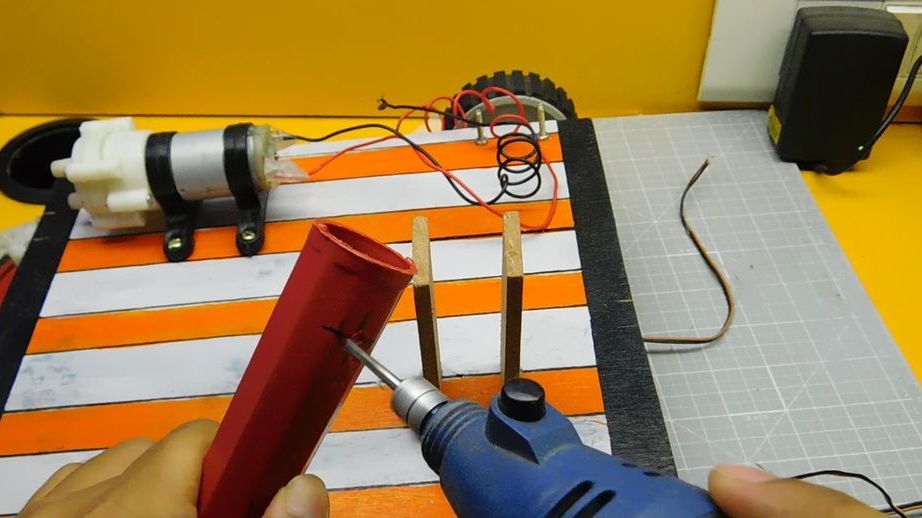
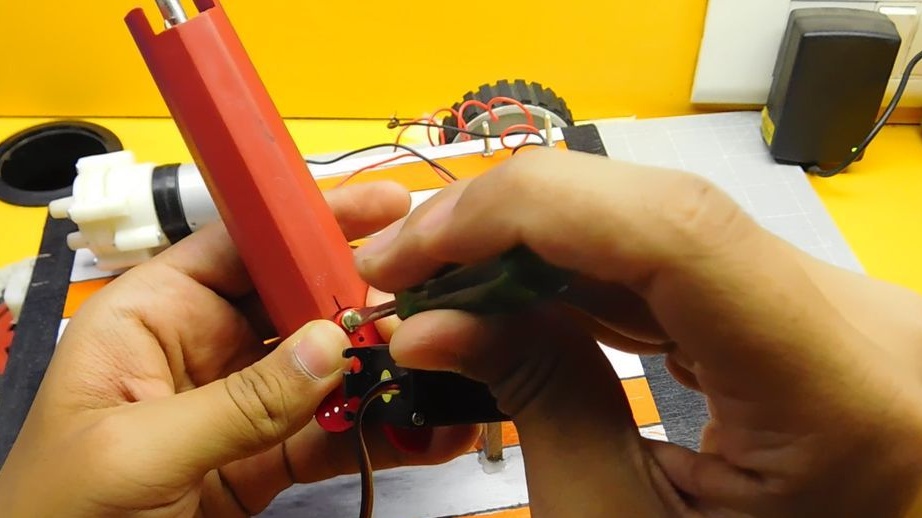
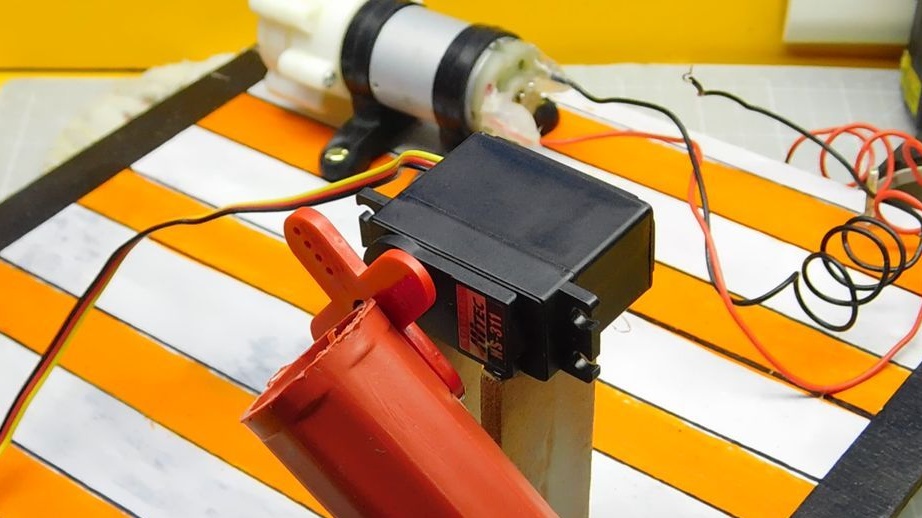
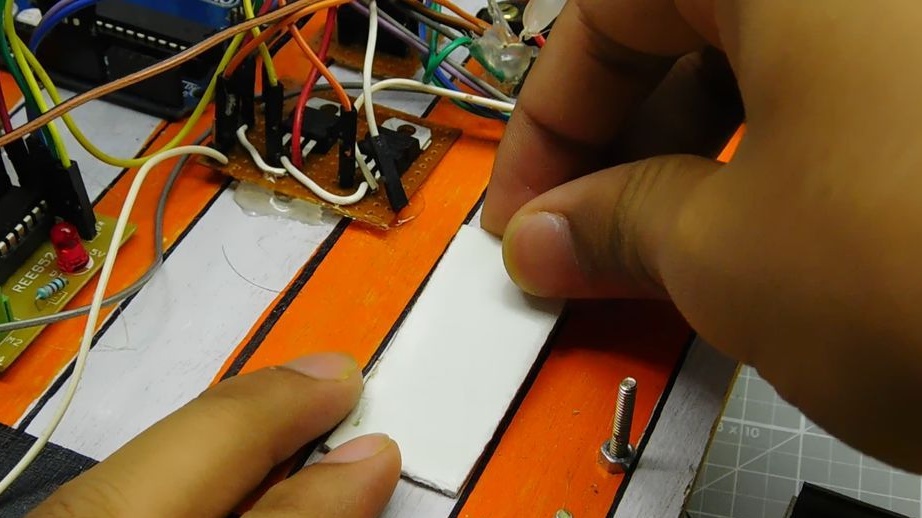
Etapa 3: Mecanismo de elevação de rolos
A tarefa do rolo é coletar poeira fina. Como o rolo é ocasionalmente necessário, o mestre decidiu criar um mecanismo para elevar e abaixar o rolo. Corrige duas ripas na plataforma paralelas uma à outra. Faz dois furos, um na alavanca do servo, o segundo na alça do rolo. Aparafusa a alça do rolo na alavanca. Prende o servo às venezianas.


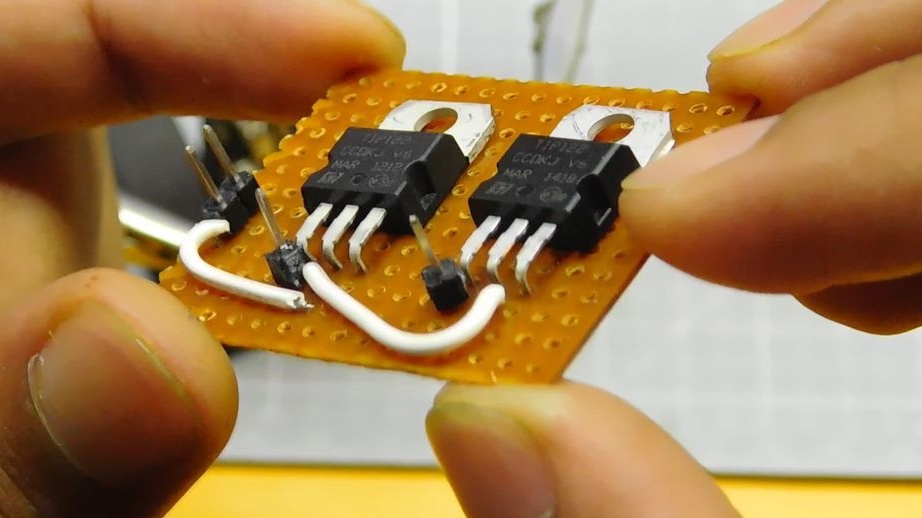
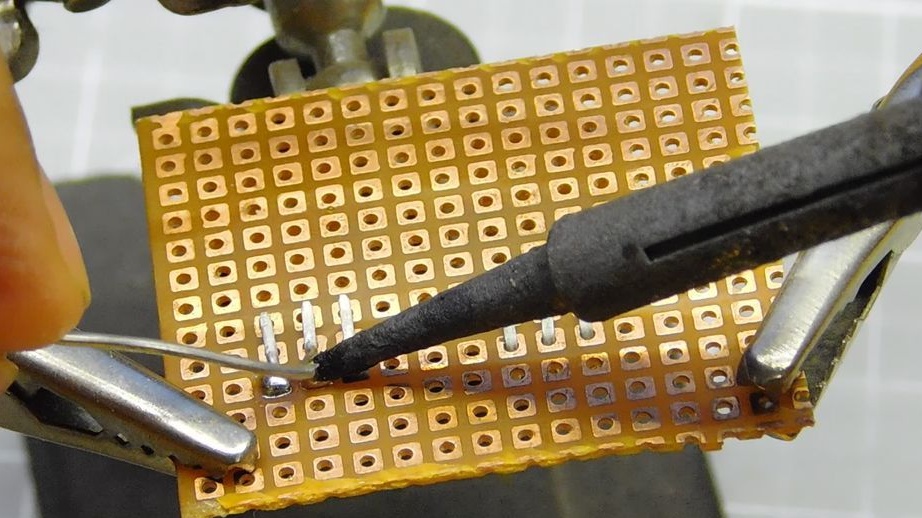
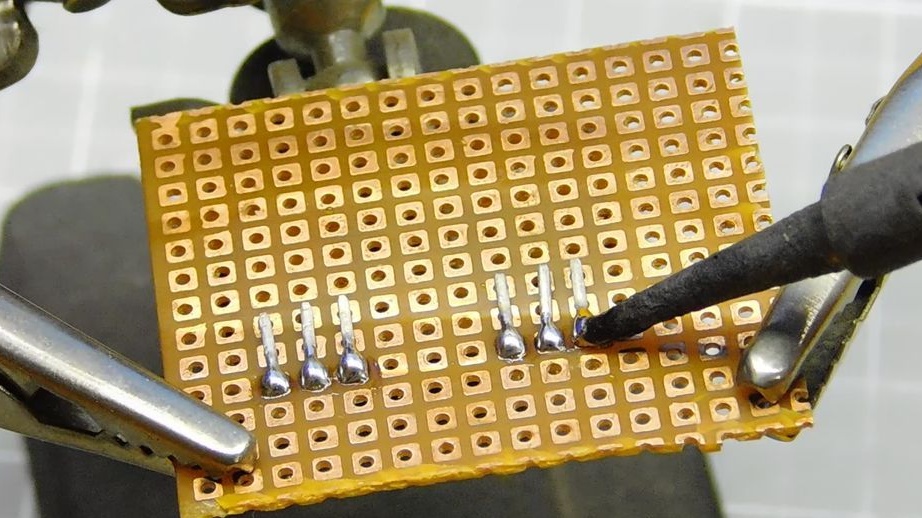
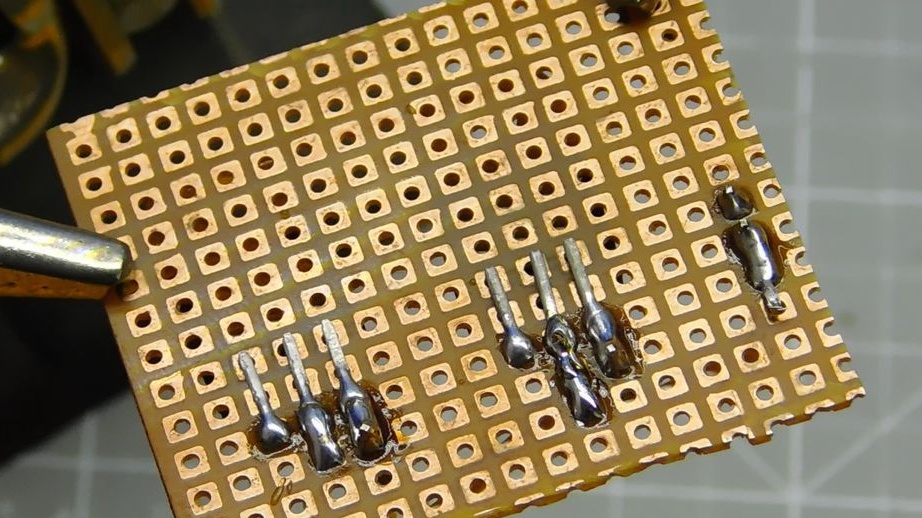
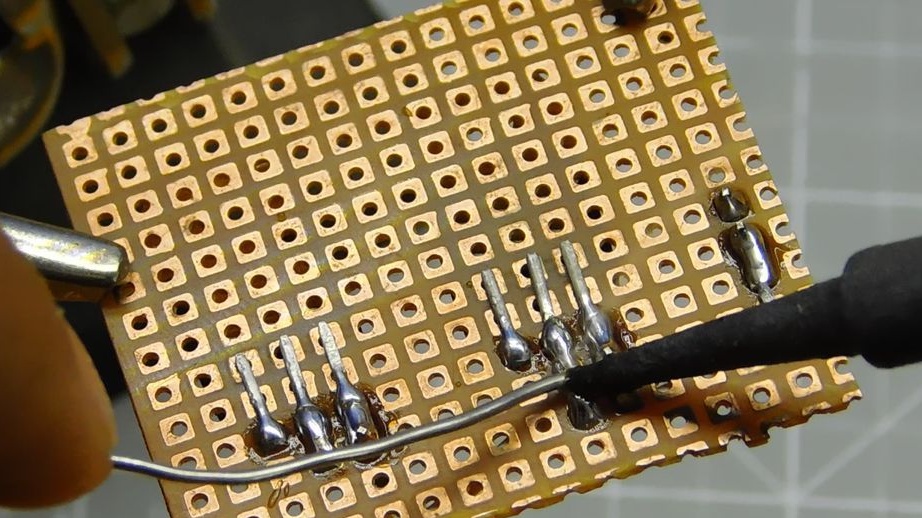
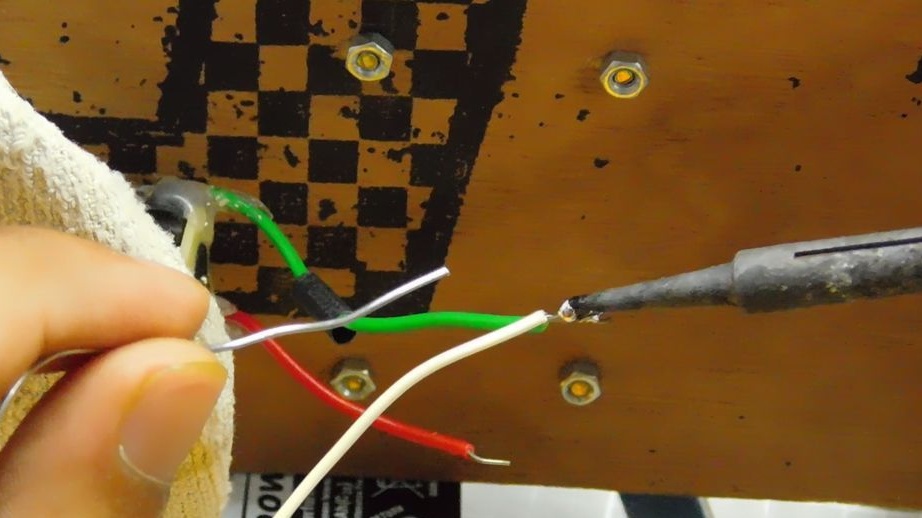
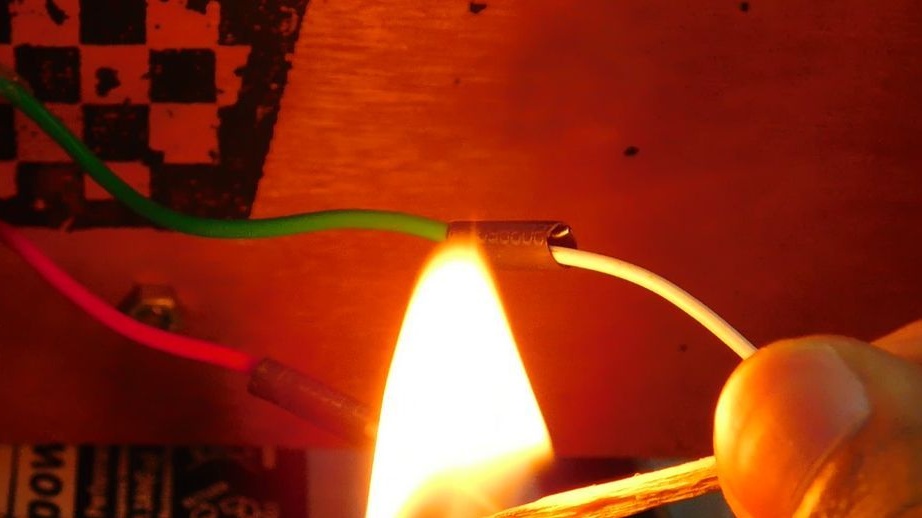
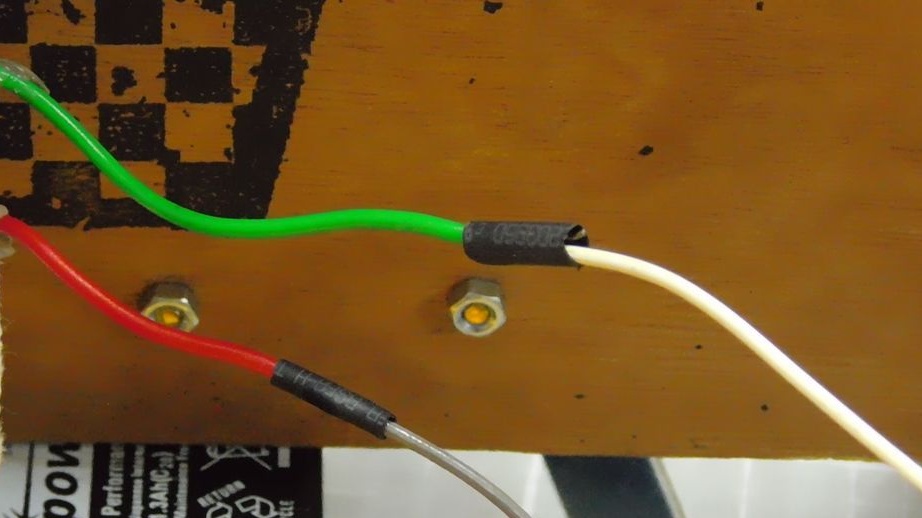
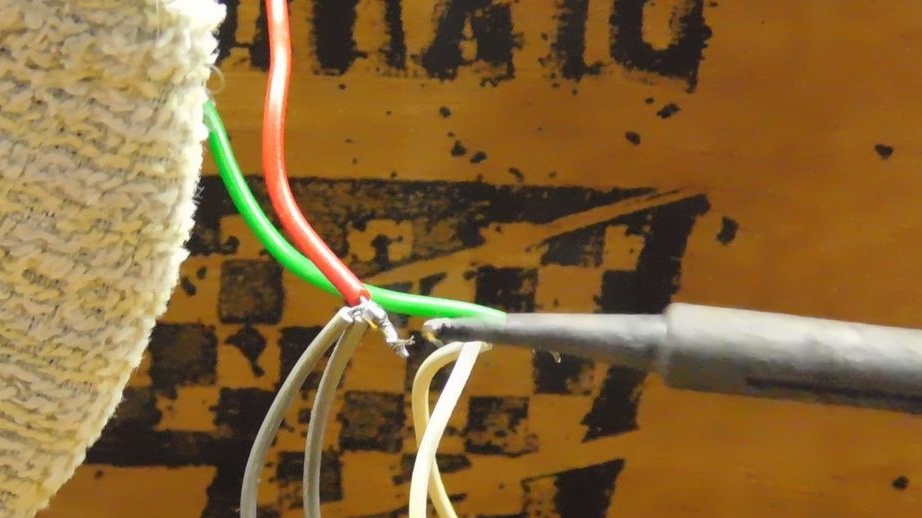
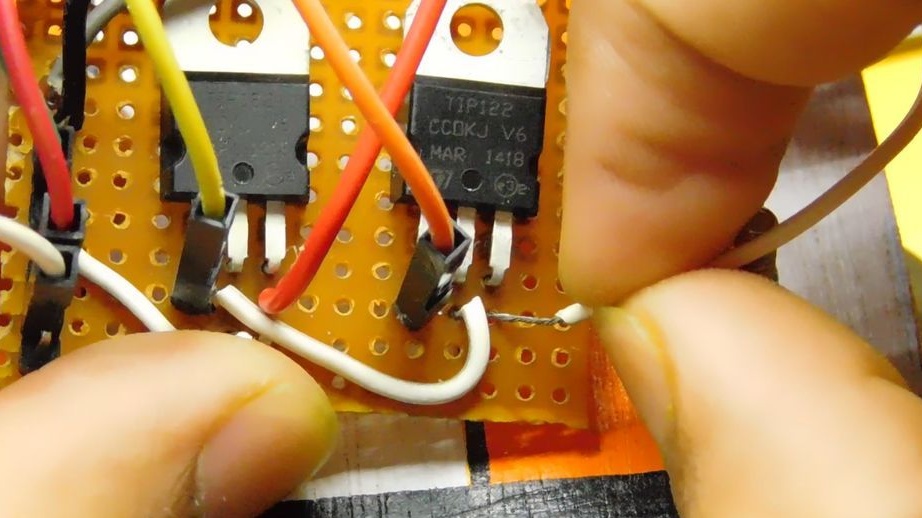
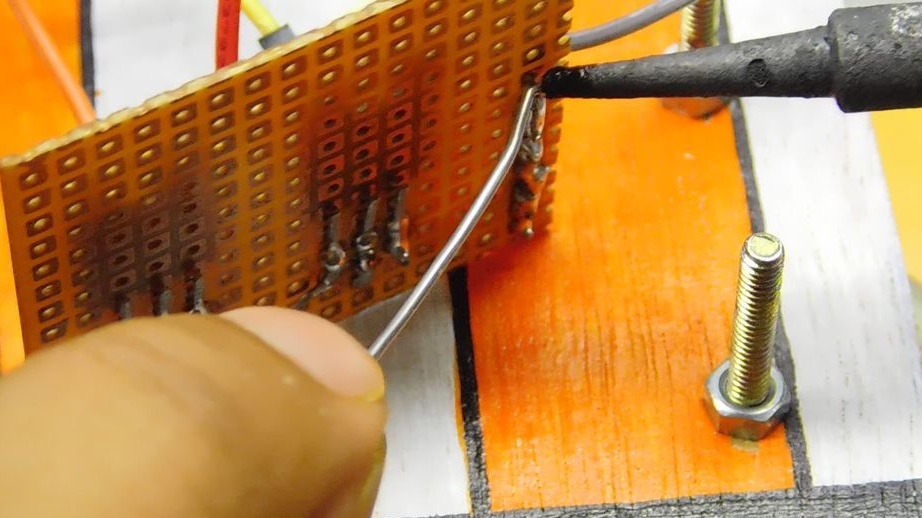
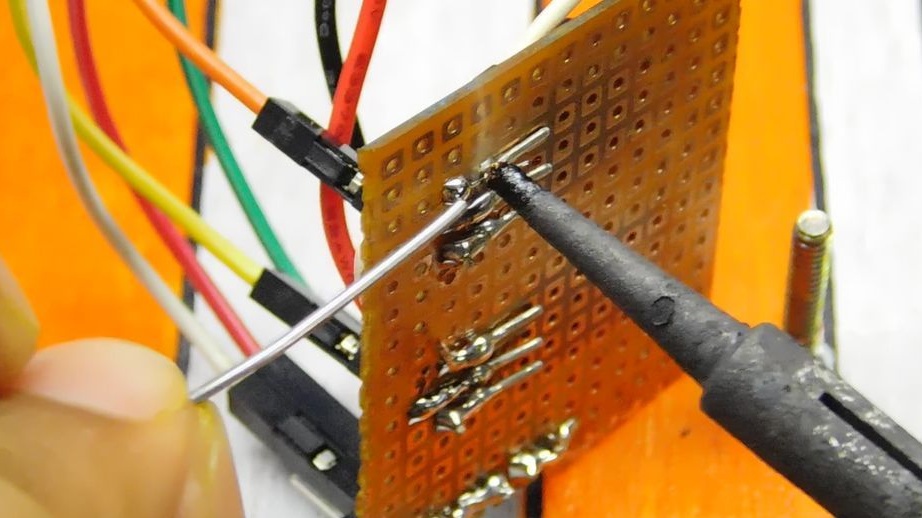
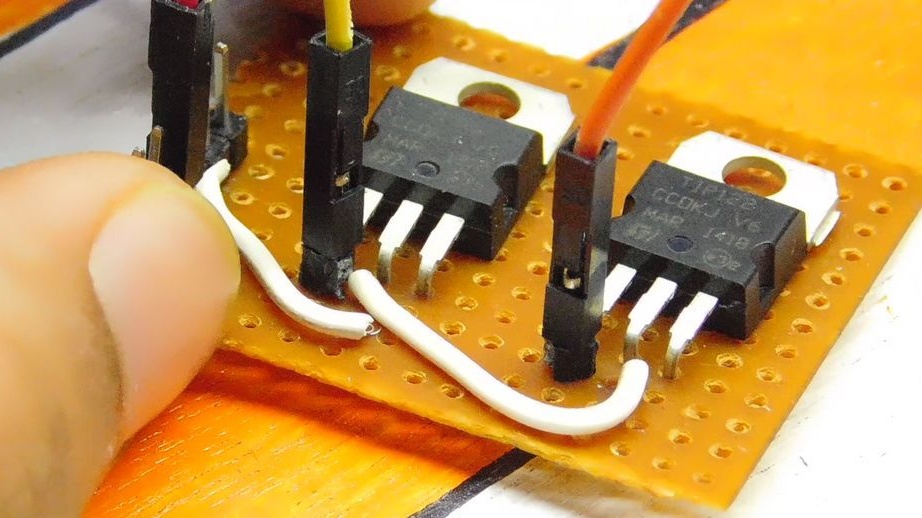
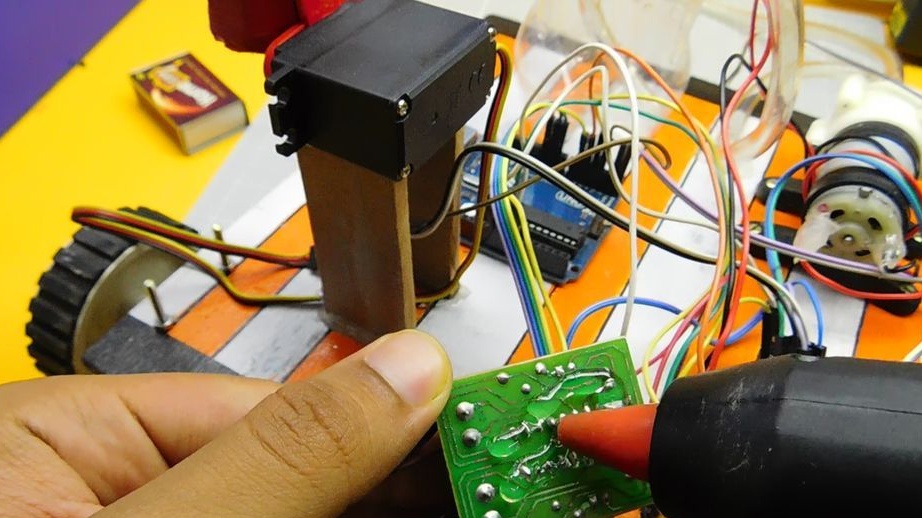
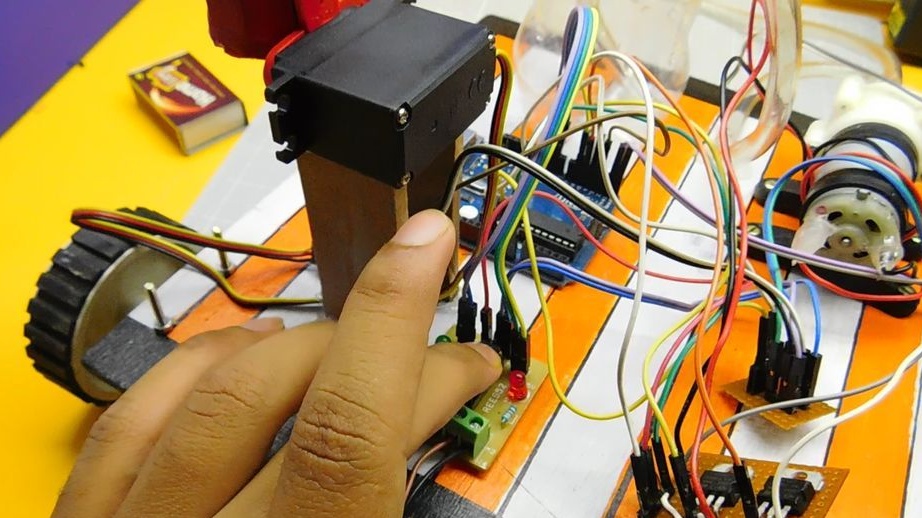
Etapa quatro: transistor
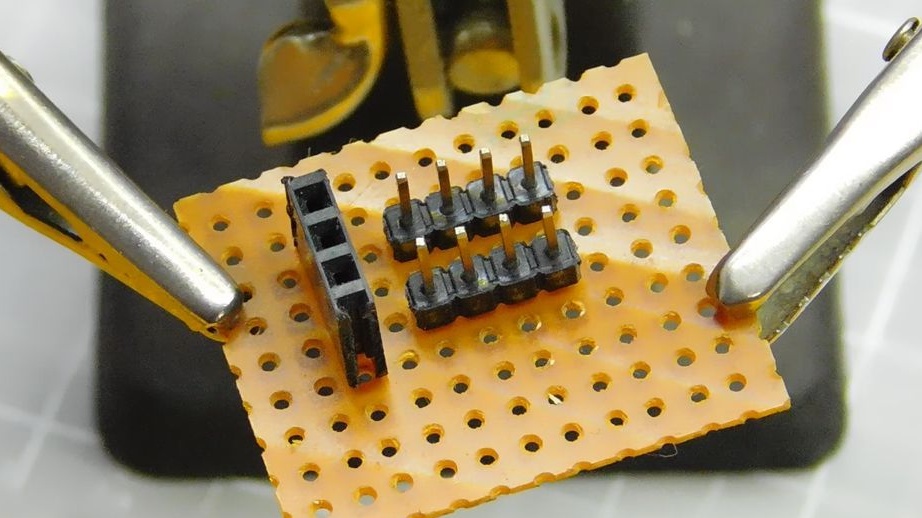
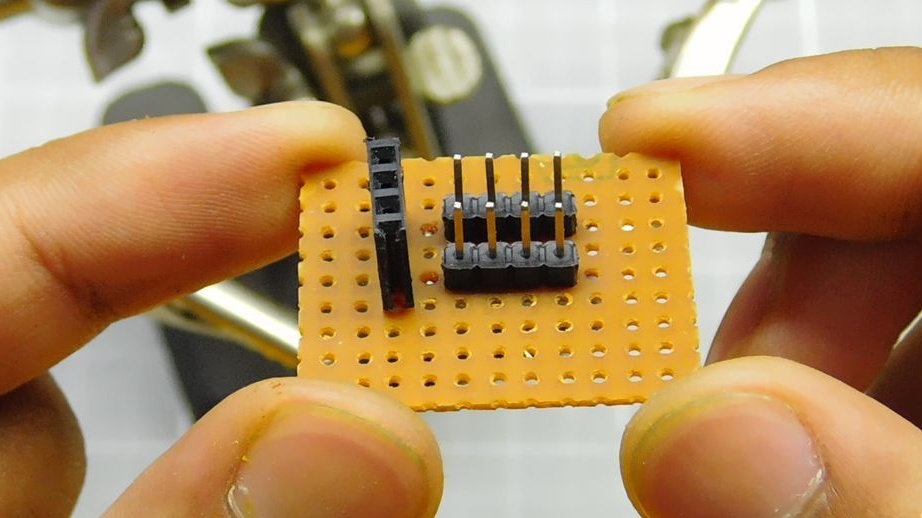
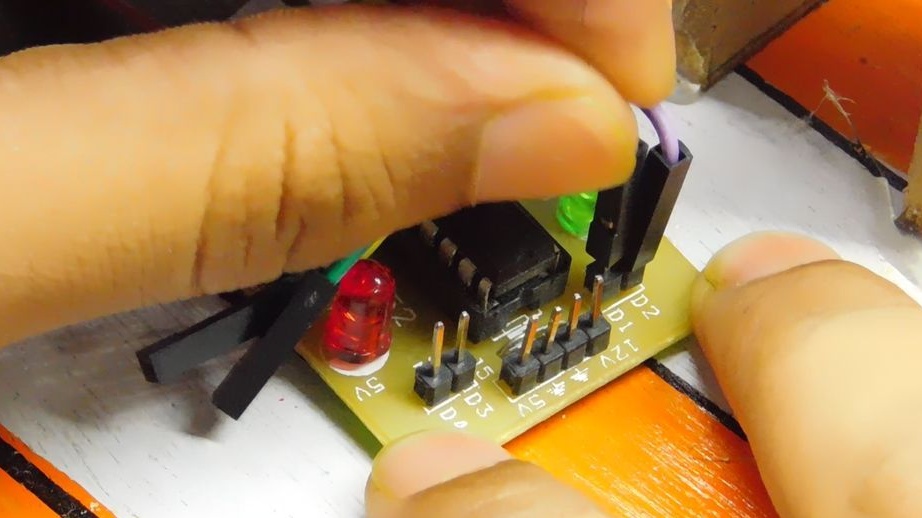
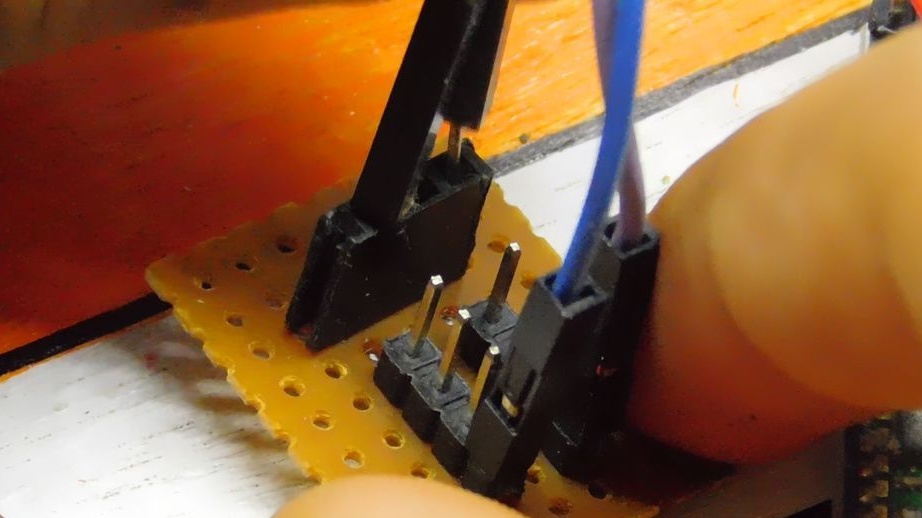
Para uma bomba de água e motores, é necessária uma potência de 12 V. Mas, como o Arduino fornece apenas 5 V, o mestre coleta o circuito no transistor TIP122.Além disso, o assistente adiciona vários pinos de + 5V e Gnd à placa de circuito.
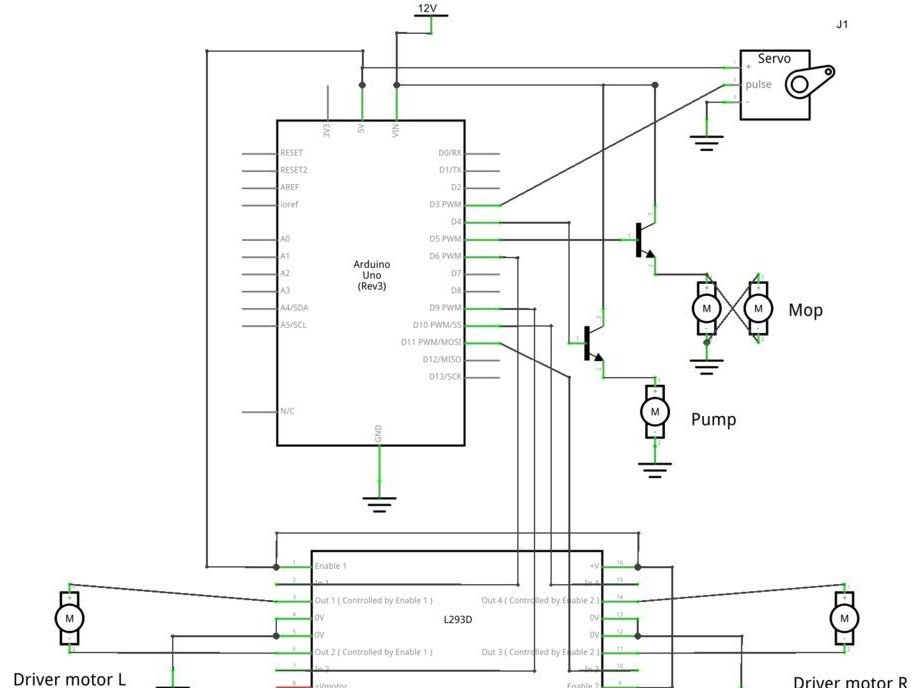
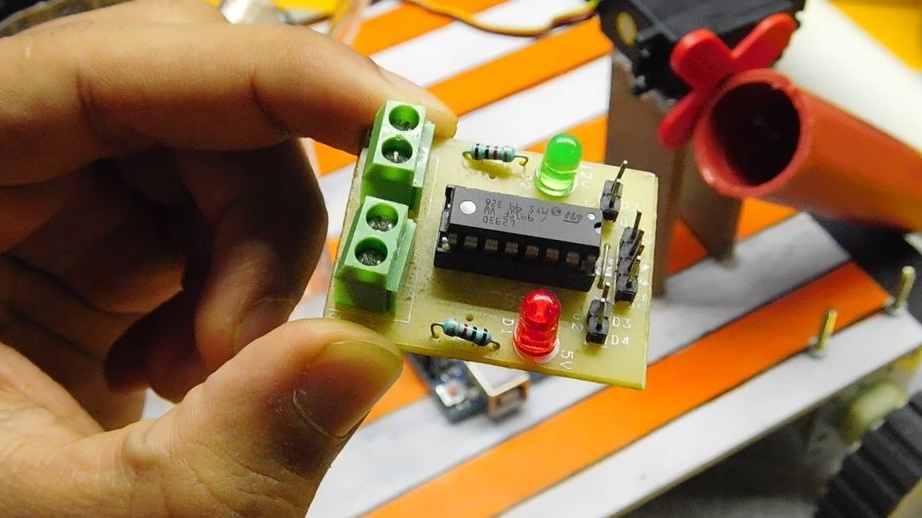
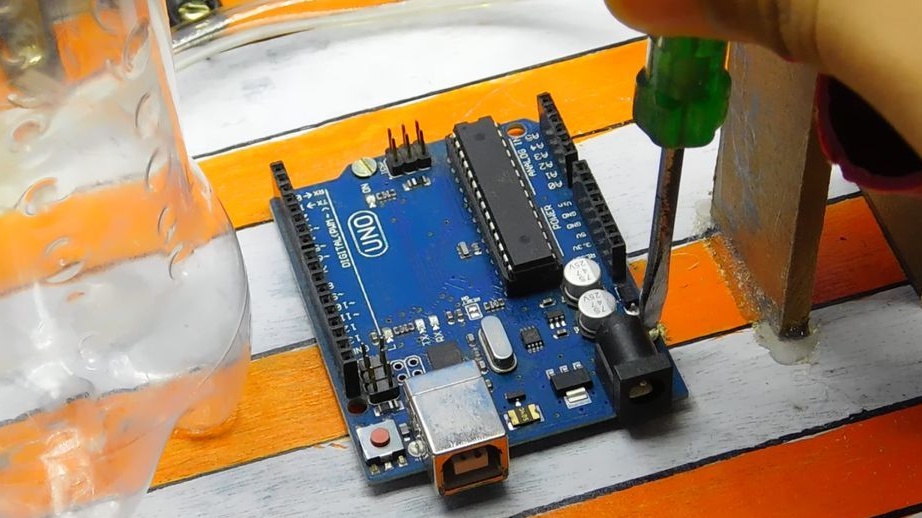
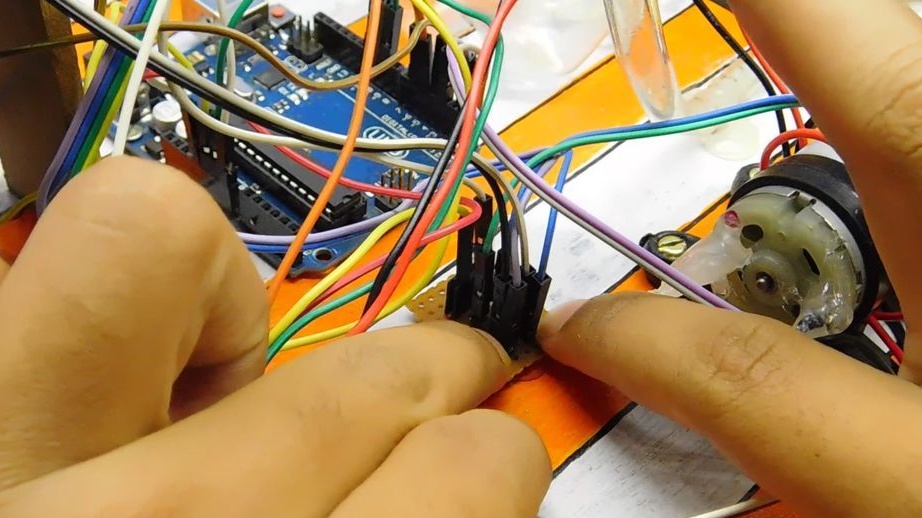
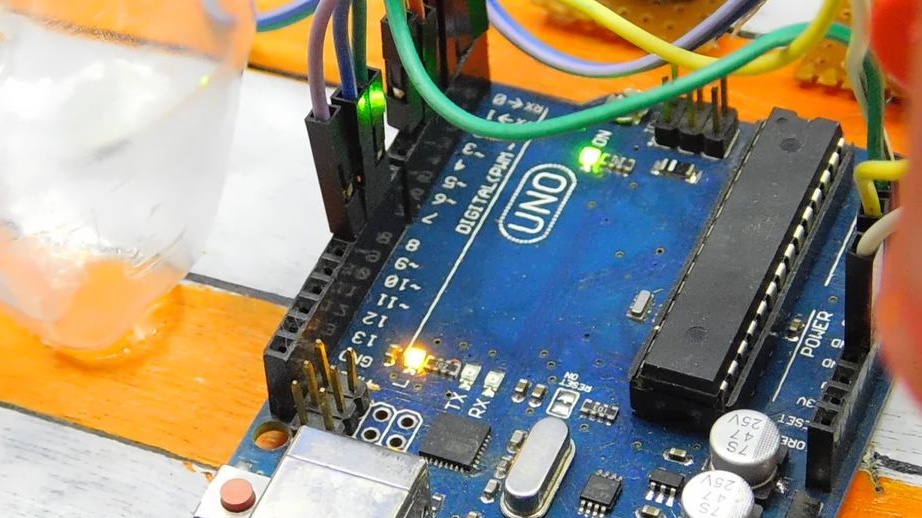
Etapa 5: Instalando o circuito do Arduino
Protege o Arduino na plataforma e conecta dispositivos elétricos à placa.
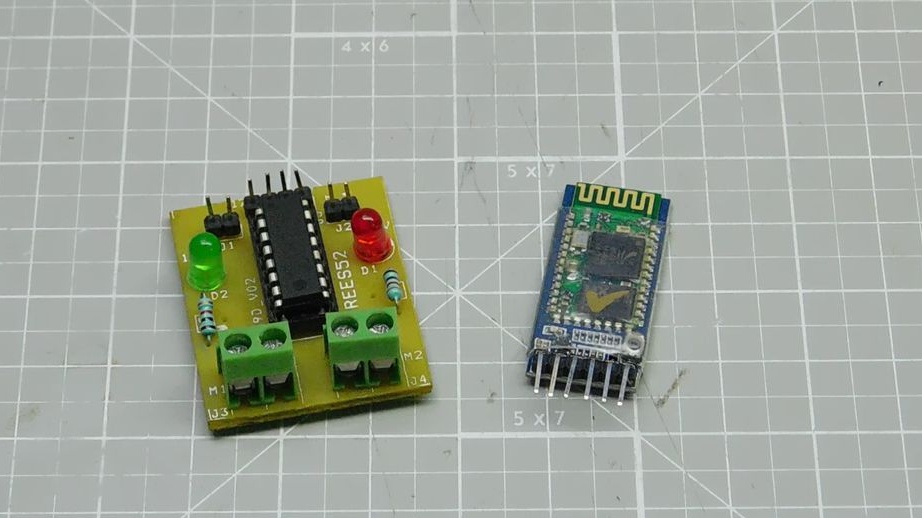
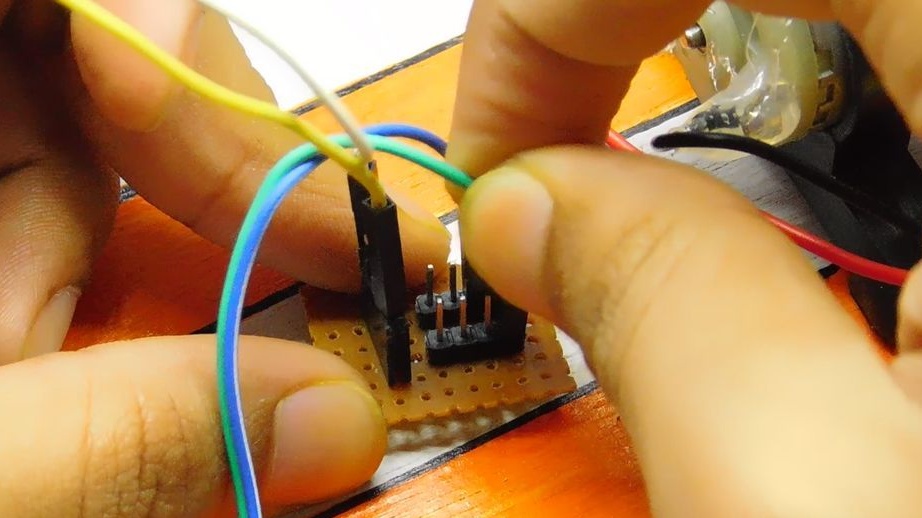
Módulo de controle do motor.
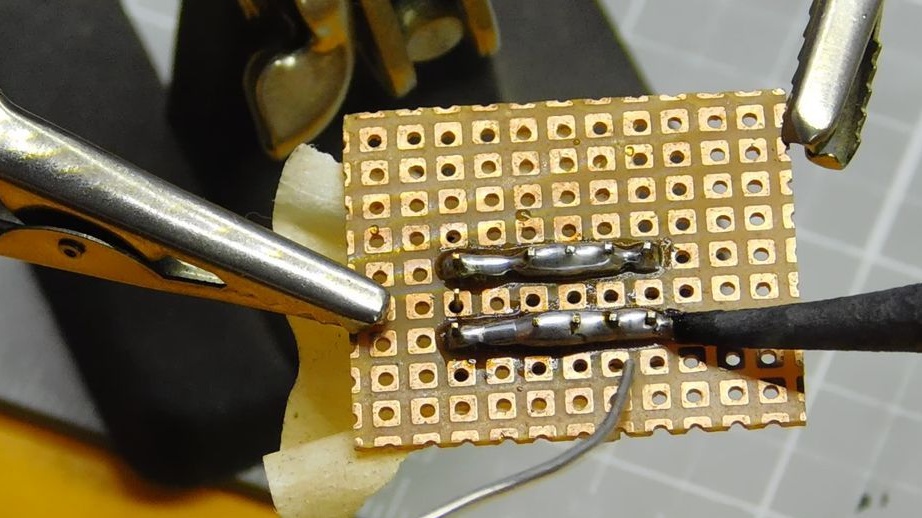
Ele solda os fios dos motores (nos quais as rodas são fixas para movimento, não as escovas). Prende os fios nos soquetes de montagem do módulo. Em seguida, conecte o módulo ao Arduino da seguinte maneira.
Módulo ::: Arduino
1 - D6
2 - D9
3 - D10
4 - D11
+ 5V - + 5V
Gnd-gnd
O módulo de + 12V será conectado à bateria.
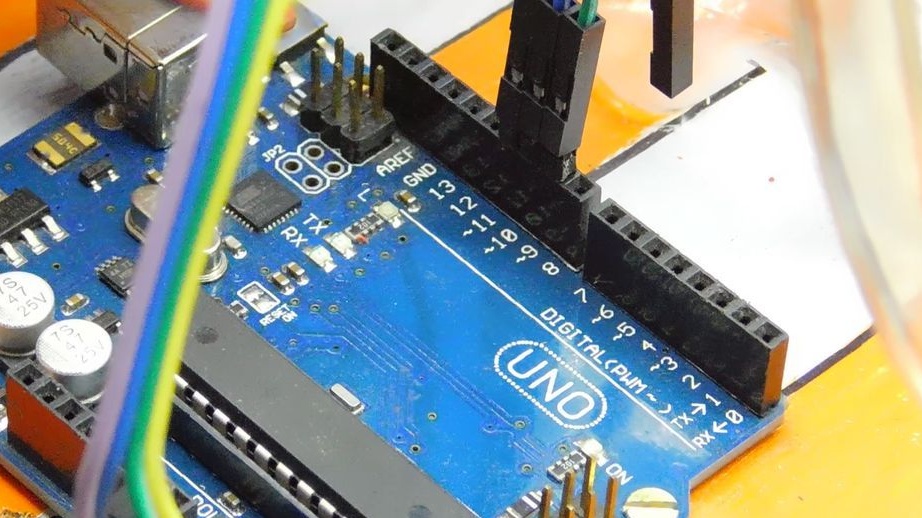
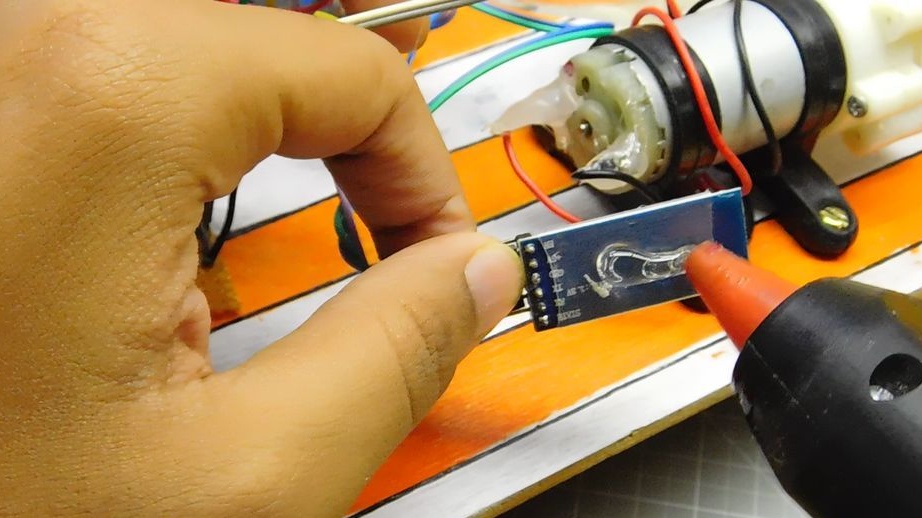
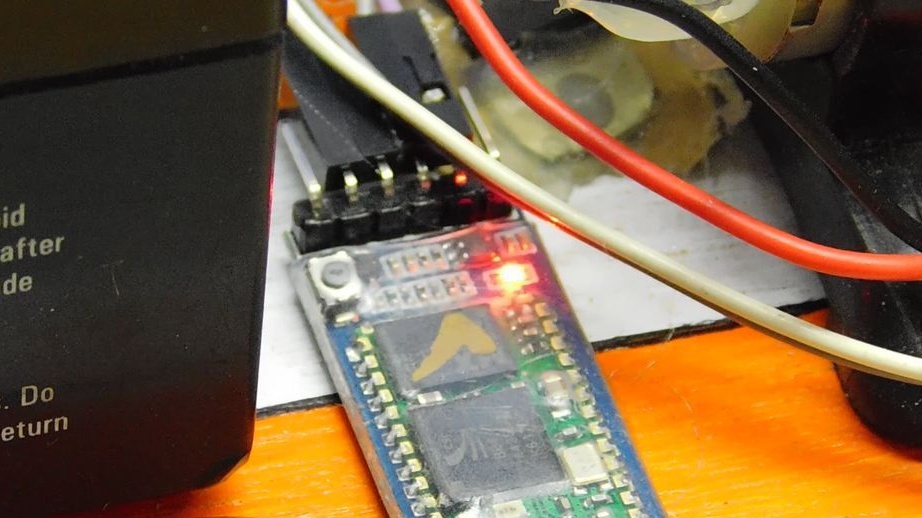
Conexão Bluetooth.
Bluetooth ::: Arduino
Vcc - + 5V
Gnd - gnd
Rx - Tx
Tx - Rx
Servo motor ::: Arduino
Vcc - + 5V
Gnd - gnd
Sinal - D3
Em seguida, conecta os motores da bomba e da escova de acordo com o esquema. Os motores das escovas são conectados em paralelo e giram em diferentes direções, direita no sentido horário e esquerda no sentido anti-horário.

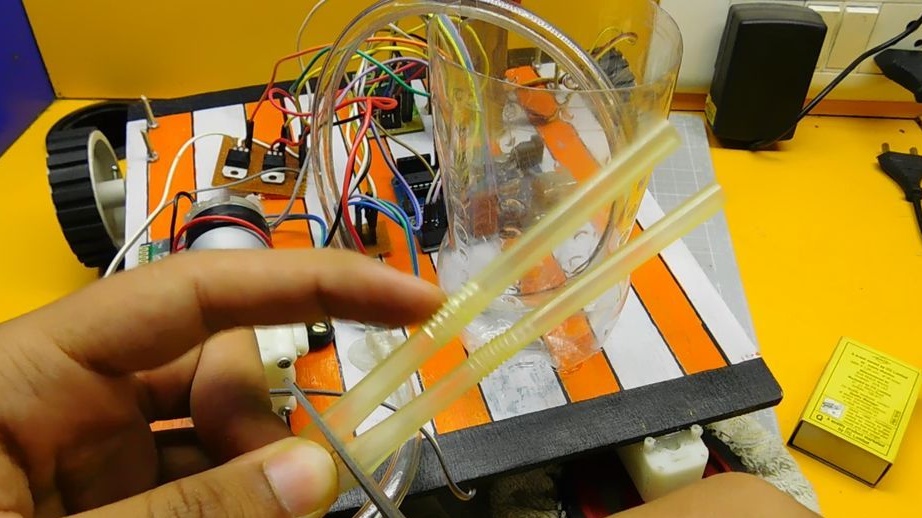
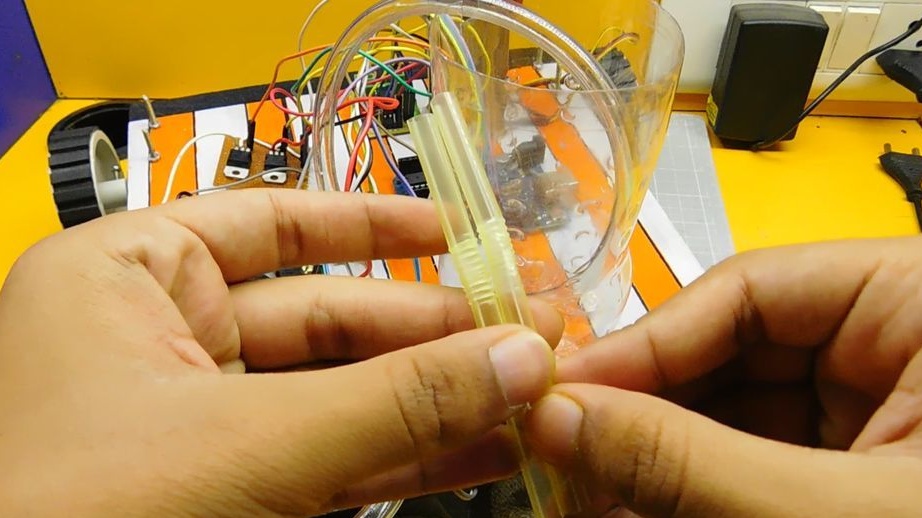
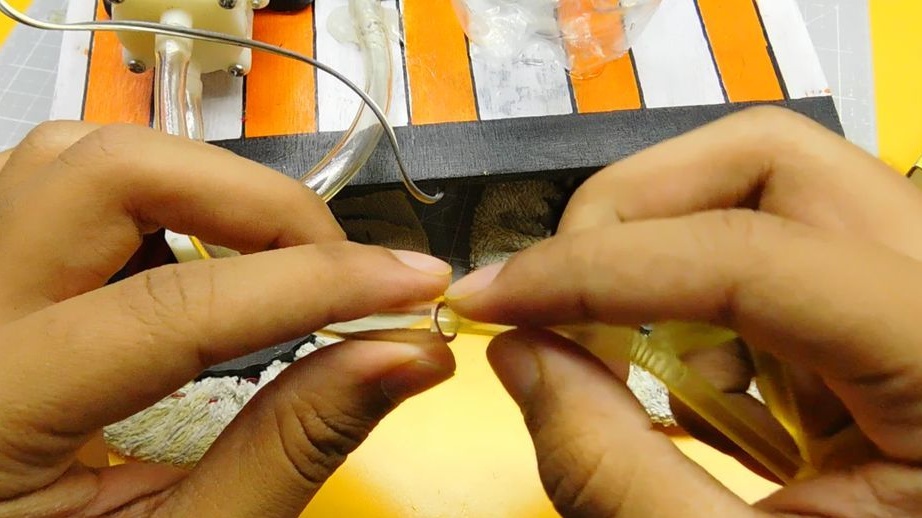
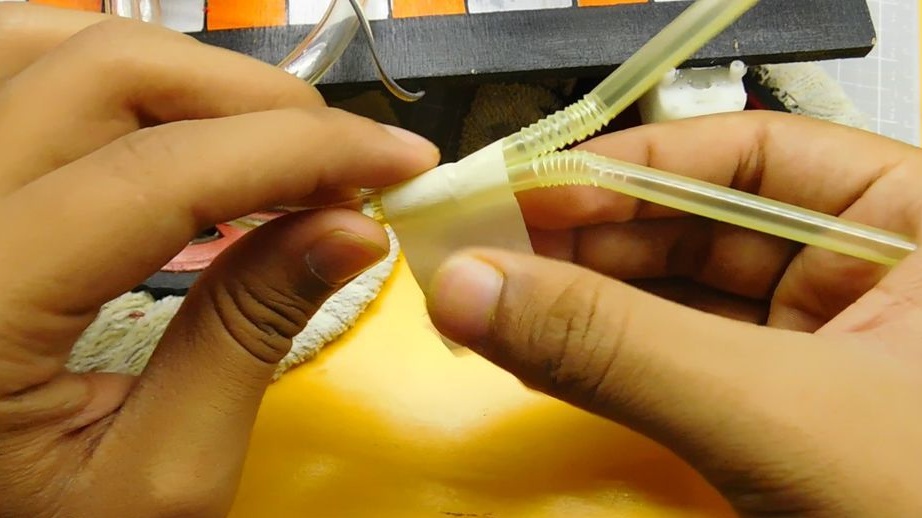
Etapa 6: Fixadores de peças de robôs
Corta dois canudos para coquetéis de aproximadamente 7 cm cada e insere os canudos no tubo de abastecimento de água. Prende canudos na frente dos pincéis.




Fechaduras na plataforma eletrônico componentes.

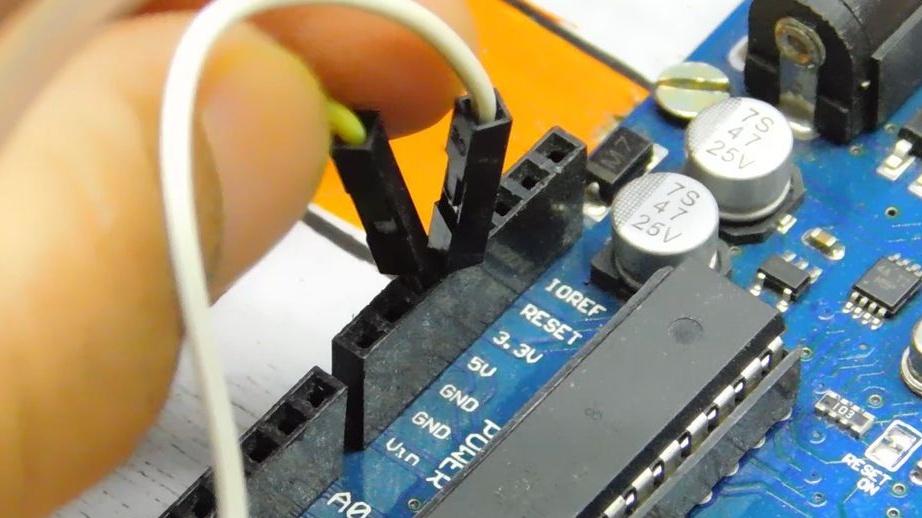
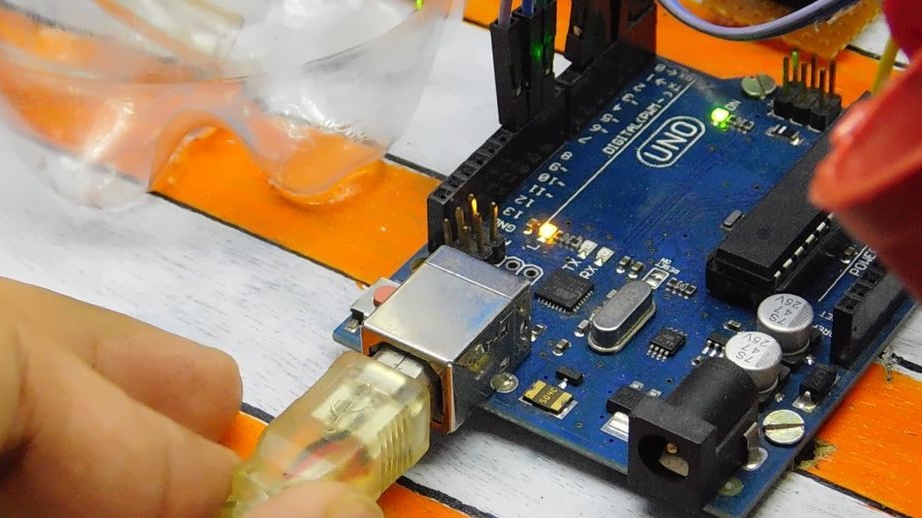
Etapa sete: baixar o código
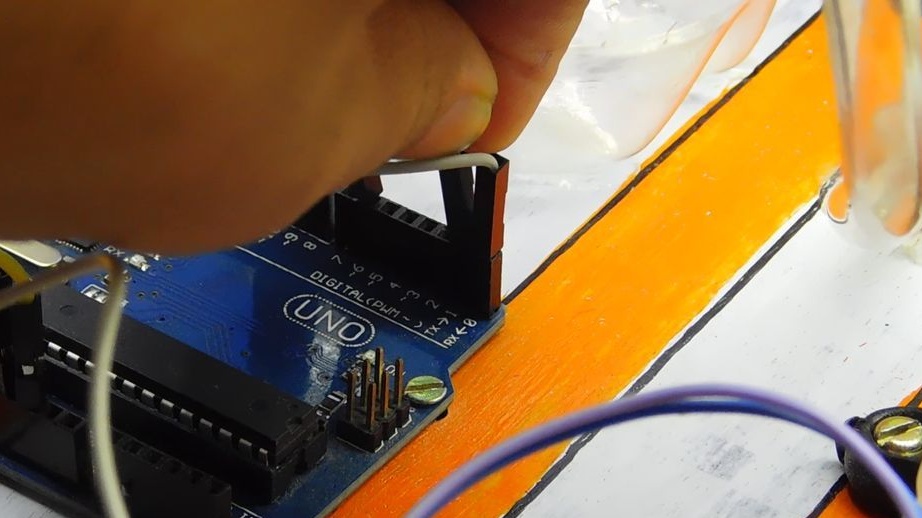
Remove os jumpers Rx e Tx da placa Arduino. Conecta a placa ao computador. Carrega o código. Define os jumpers no lugar. .
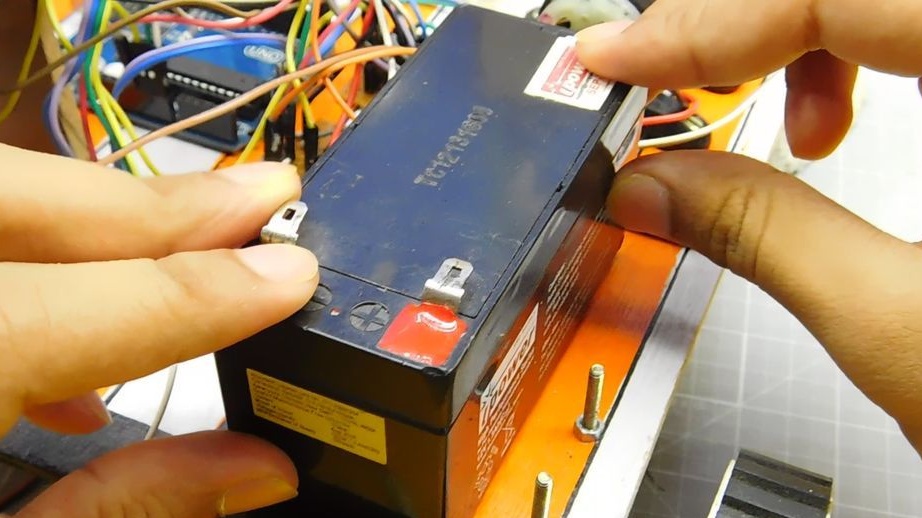
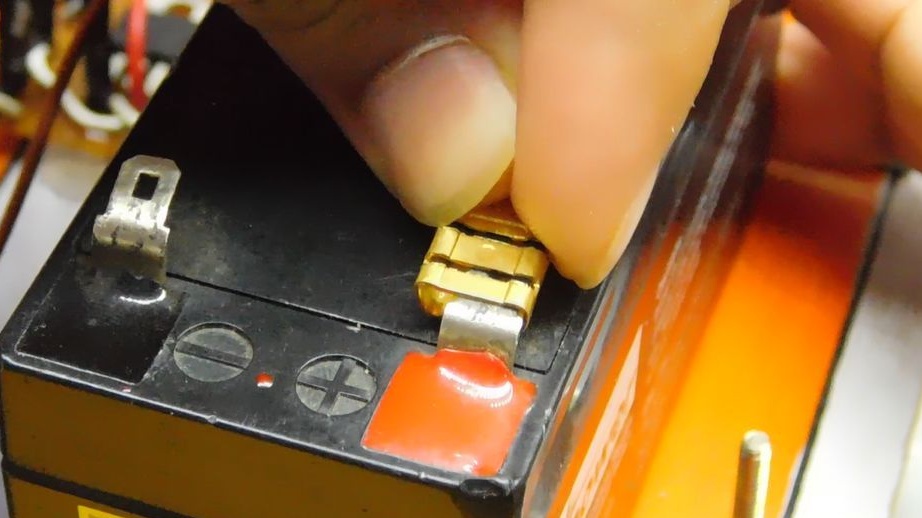
Etapa Oito: Bateria
Protege, usando fita dupla face, a bateria na plataforma. Conecta dispositivos eletrônicos à bateria. O mestre do Arduino aconselha a se conectar através de um divisor de tensão. Você também pode adicionar um interruptor ao circuito.

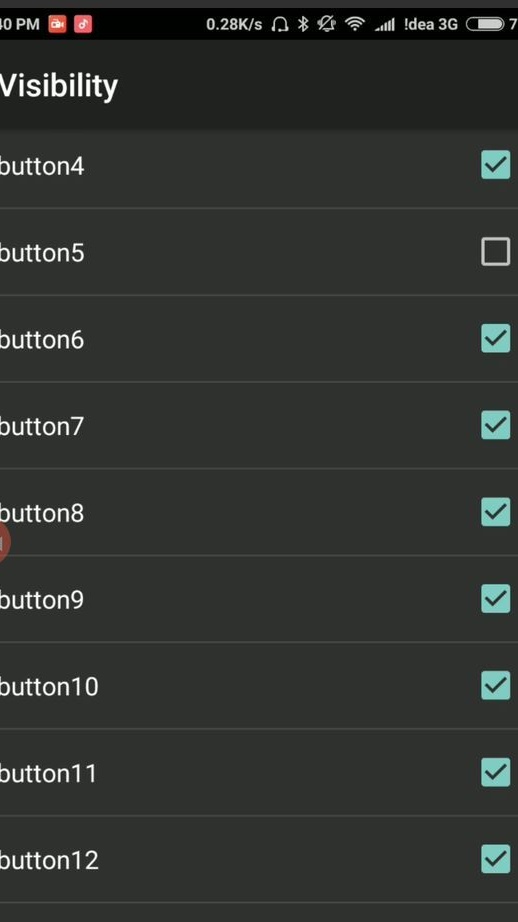
Etapa nove: controlar o robô
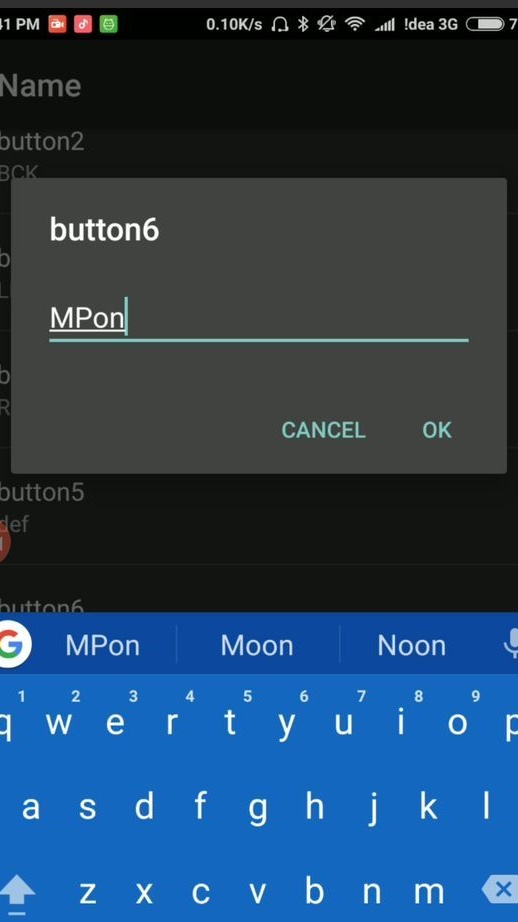
No Google Play, o assistente baixa o aplicativo 'Bluetooth Serial Controller'. Abre o aplicativo. Vai para configurações> visibilidade. Desativa os botões 5, 9, 12. Vai para os nomes. Atribui um botão de 2 a 3 letras para cada botão. Veja a foto abaixo.
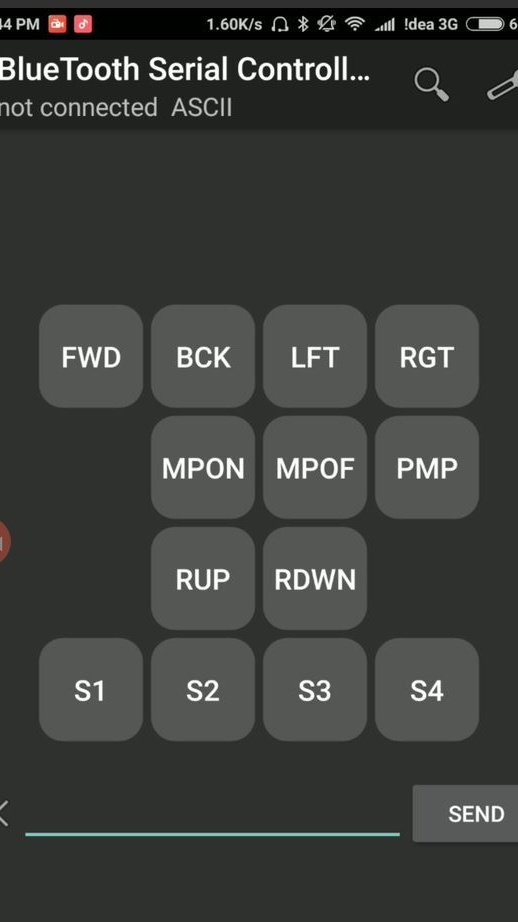
Cada botão instala um comando (as aspas precisam ser removidas, não mudam de maiúsculas e minúsculas):
Botão 1 (FWD): 'F'
Botão 2 (BCK): 'B'
Botão 3 (LFT): 'L'
Botão 4 (RGT): 'R'
Botão 6 (MPON): 'M'
Botão 7 (MPOF): 'm'
Botão 8 (PMP): 'P'
Botão 10 (RUP): 'U'
Botão 11 (RDWN): 'u'
Botão 13 (S1): '1'
Botão 14 (S2): '2'
Botão 15 (S3): '3'
Botão 16 (S4): '4'
Em comandos de parada> comandos, atribui comandos apenas a estes botões:
Botão 1: 'S'
Botão 2: 'S'
Botão 3: 'S'
Botão 4: 'S'
Botão 8: 'p'

Agora resta conectar ao módulo bluetooth ("HC-05"), digite a senha (1234 ou 0000) e você pode tentar limpar a sala -)))
Graças ao mestre-mestre, desejamos que ele melhore o robô e obtenha um trabalho completamente autônomo.
Todo o processo de montagem do limpador de robô pode ser visto no vídeo.