

Bom dia amantes do arduino! Como estava pendurado na Internet, me deparei com um artigo bastante divertido sobre como transformar uma mão em um manipulador que repete os movimentos da mão de uma pessoa, inspirado pela simplicidade e pelo efeito caseiro caseiro decidiu recolhê-lo. Encontrei sensores de flexão no Alliekspress para a mão do transmissor e fiquei um pouco morto, uma coisa ficou na faixa de US $ 15 a 20, acontece que 5 desses sensores para apenas uma mão custam de US $ 75 a 100 e isso é apenas para os sensores! Depois de algum tempo, aprendi a fazer esses sensores faça você mesmoAcontece que é muito simples e barato.
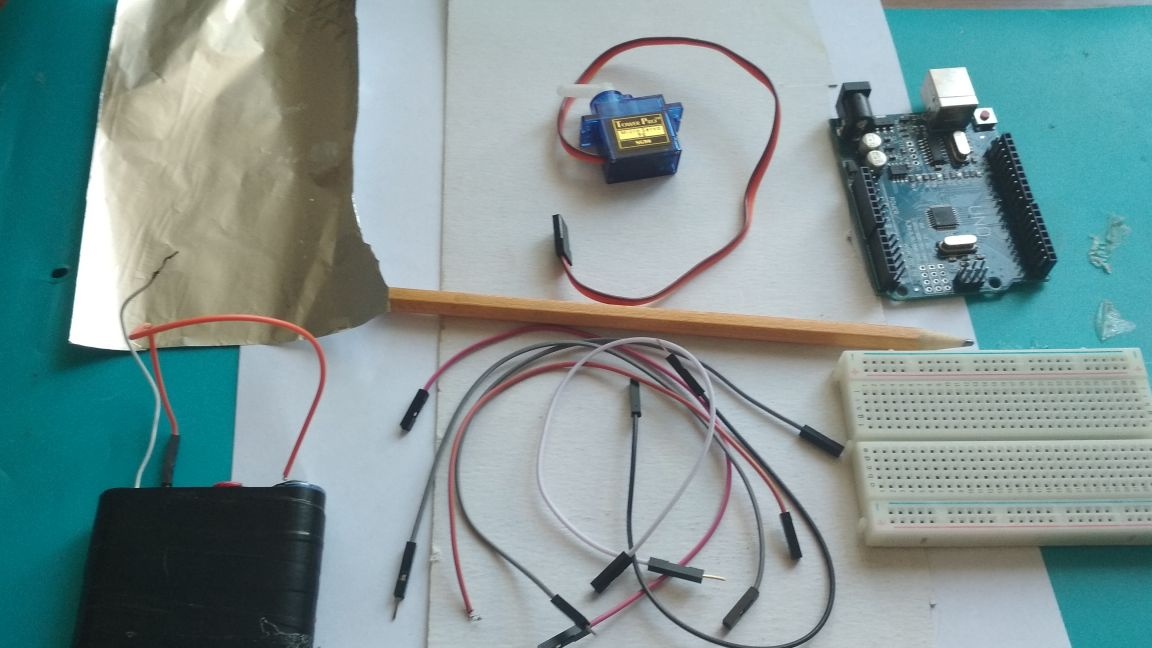
E assim, para o sensor de curvatura, precisamos:
pagamento Arduino Uno ()
-breadboard
- conectando fios como "pai-mãe" ou "pai-pai"
-servomotor
cartão
papel
foil
lápis
- fonte de alimentação de 6 a 12 volts (eu uso 4 baterias conectadas em série a 1,5 V)
Das ferramentas que precisamos:
pistola de cola
tesoura
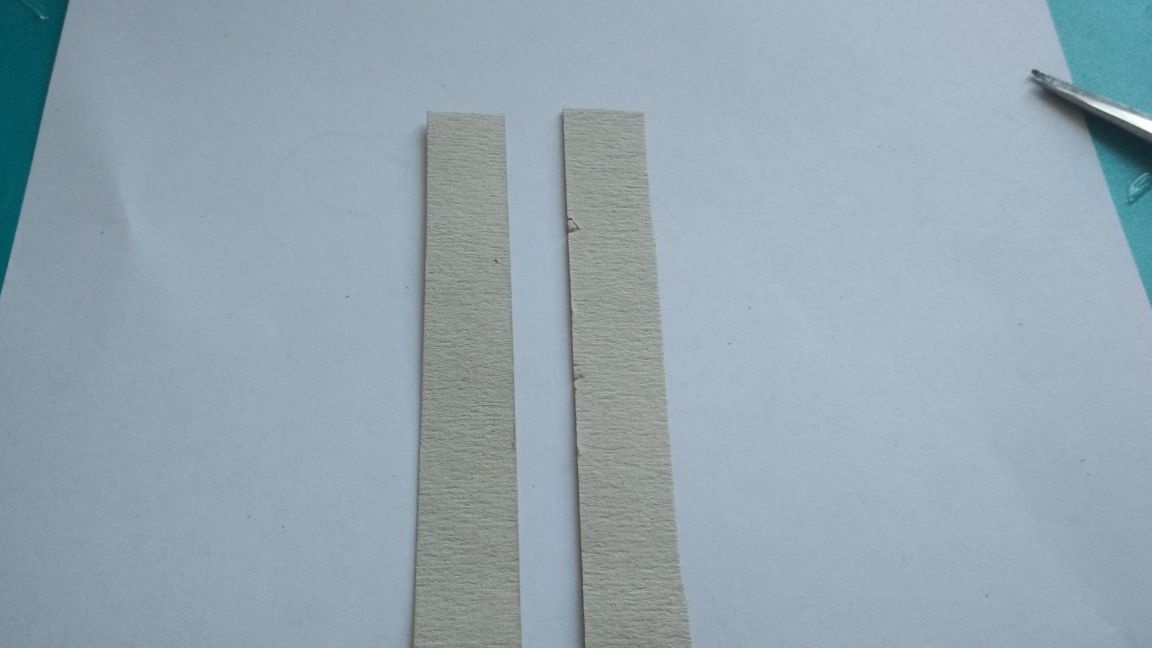
E assim, a primeira coisa que cortamos do papelão é duas tiras 2 cm mais compridas que o dedo indicador e cerca de 1 cm de largura:

Corte um pouco da mesma tira de papel um pouco menos:

Aplique a sombra dos dois lados da tira de papel da melhor maneira possível:


Corte duas tiras de papel alumínio menores que o papel:
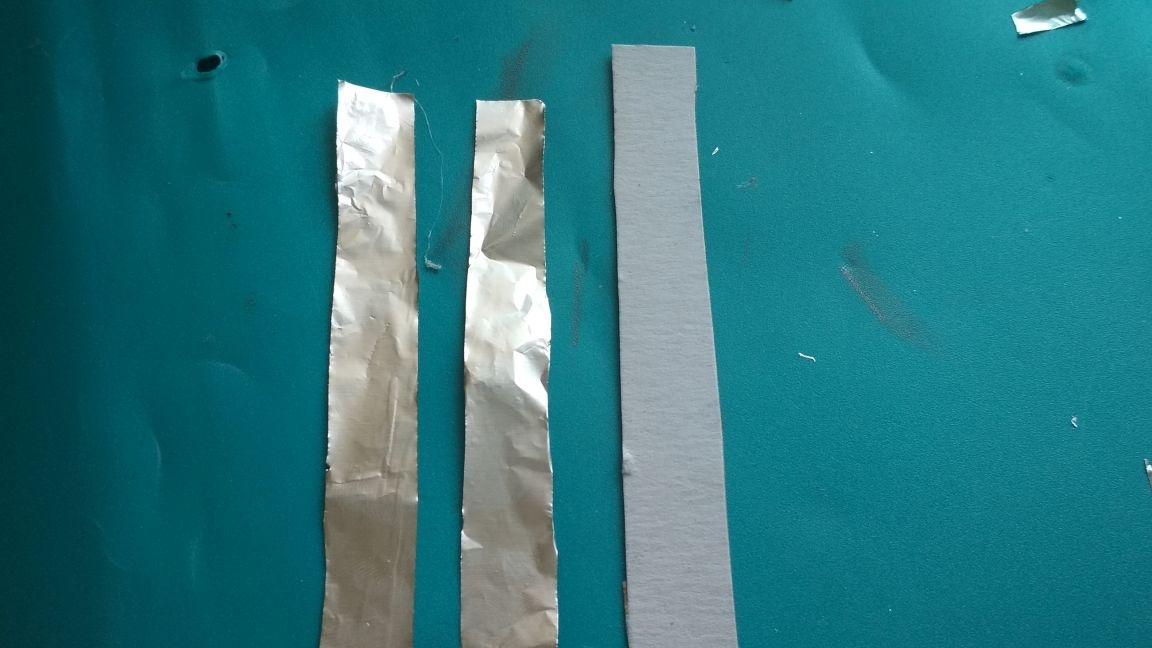
Cole-os nas tiras de papelão, como mostra a foto:

Dos fios de conexão "pai-mãe" cortamos a saída "mãe" e limpamos suas extremidades do isolamento:
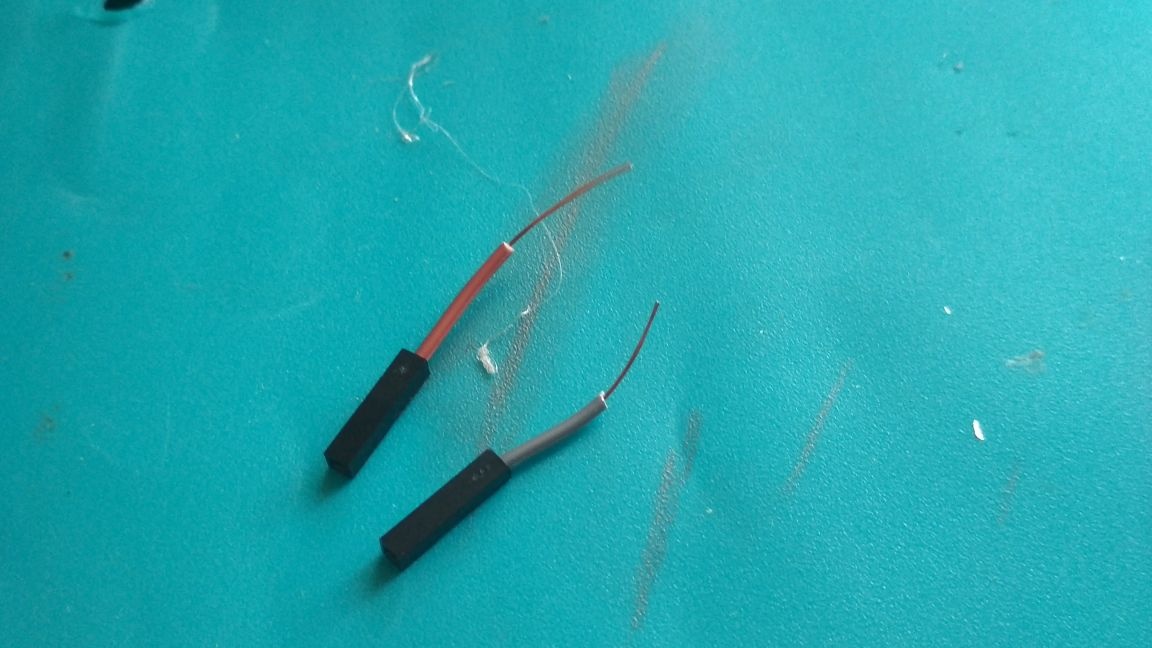
Anexamos da fita ou da solda:

Prendemos uma tira de papel em uma das metades, para que ela entre em contato com a folha, depois cubra com a segunda metade do lado com a folha, pressione e cole nas laterais:

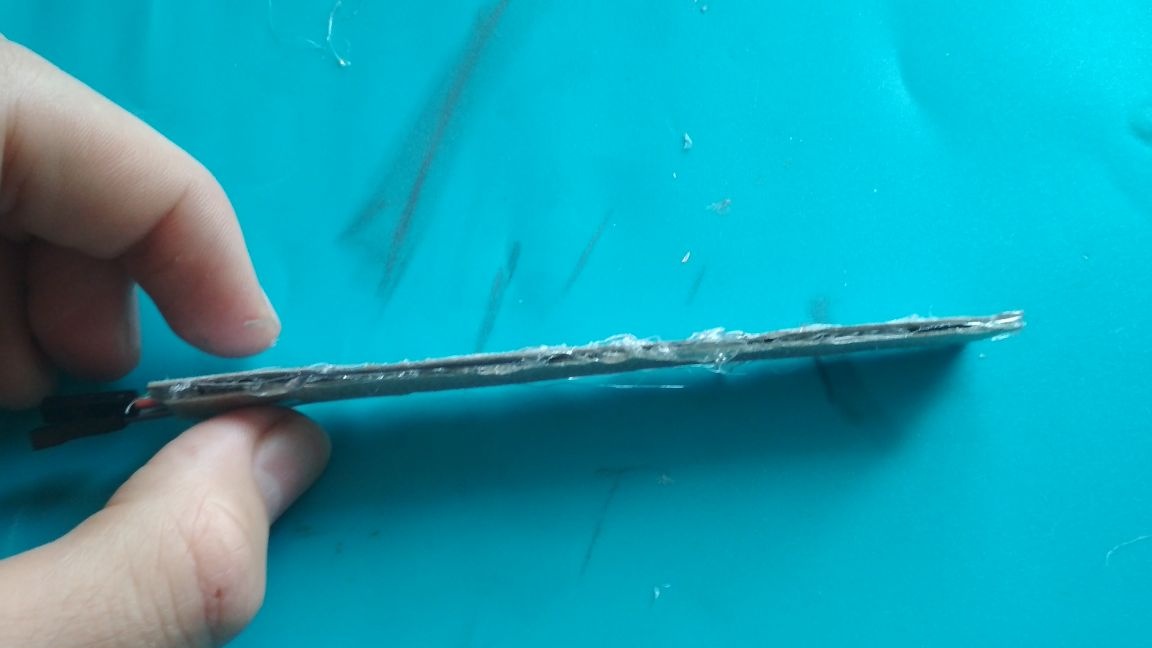

Criamos essas “cobras” de cada lado com a ajuda de cola quente, elas são necessárias para que o design seja mais flexível

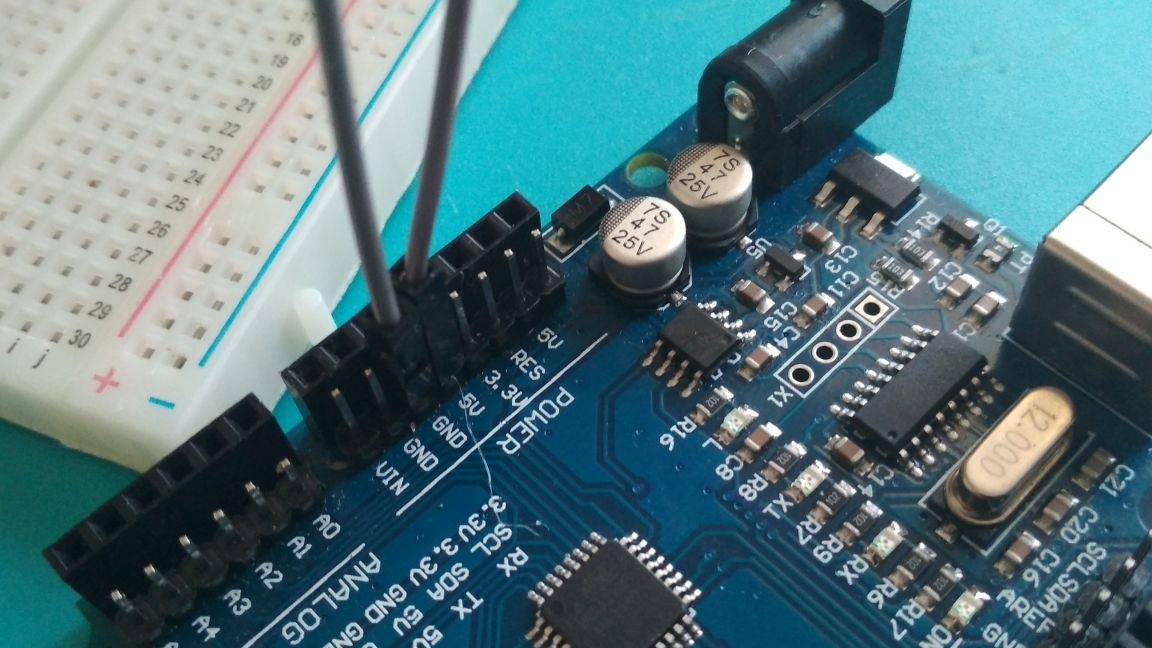
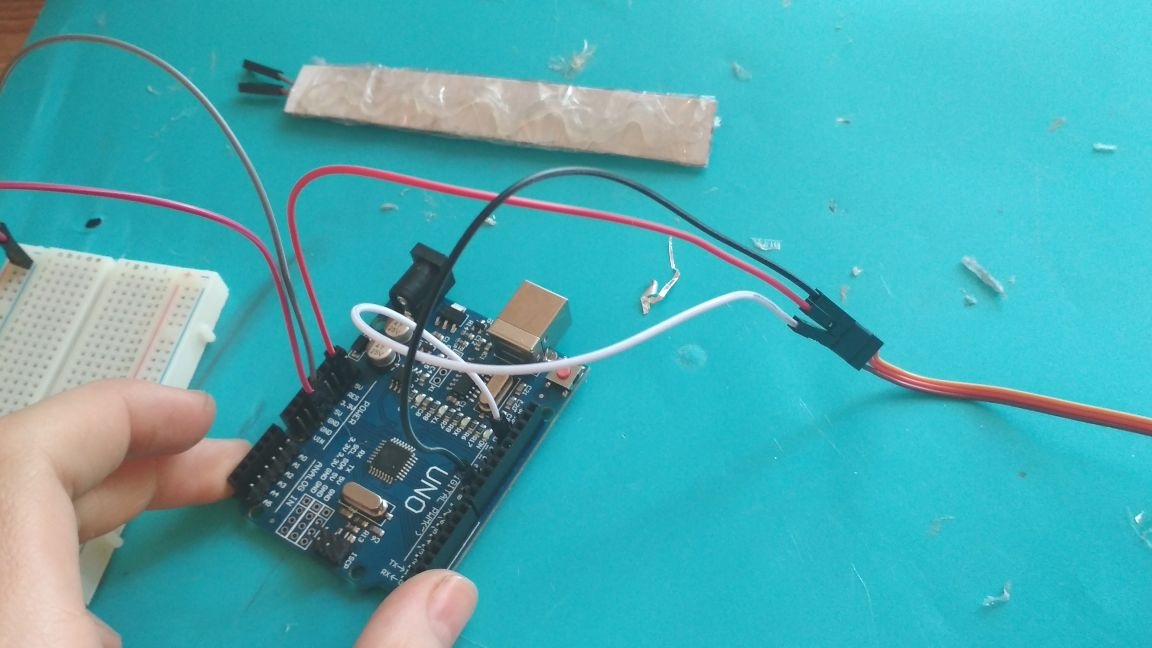
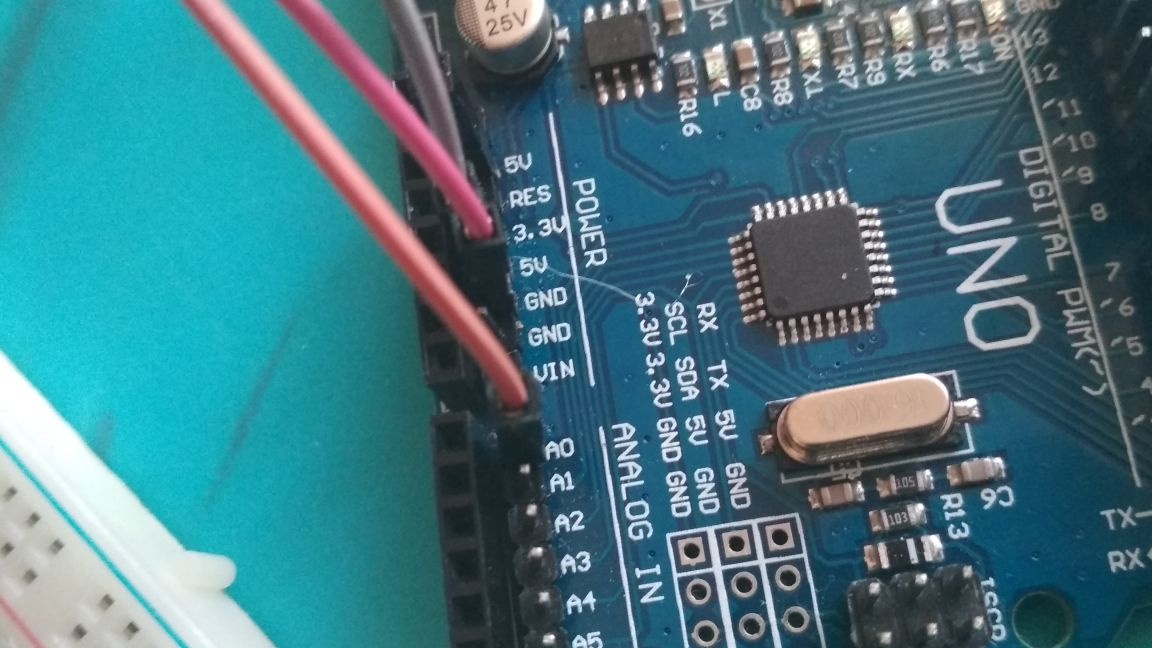
Tomamos um arduino e conectamos a saída de 5v ao sinal de mais da placa de ensaio e Gnd ao sinal de menos:

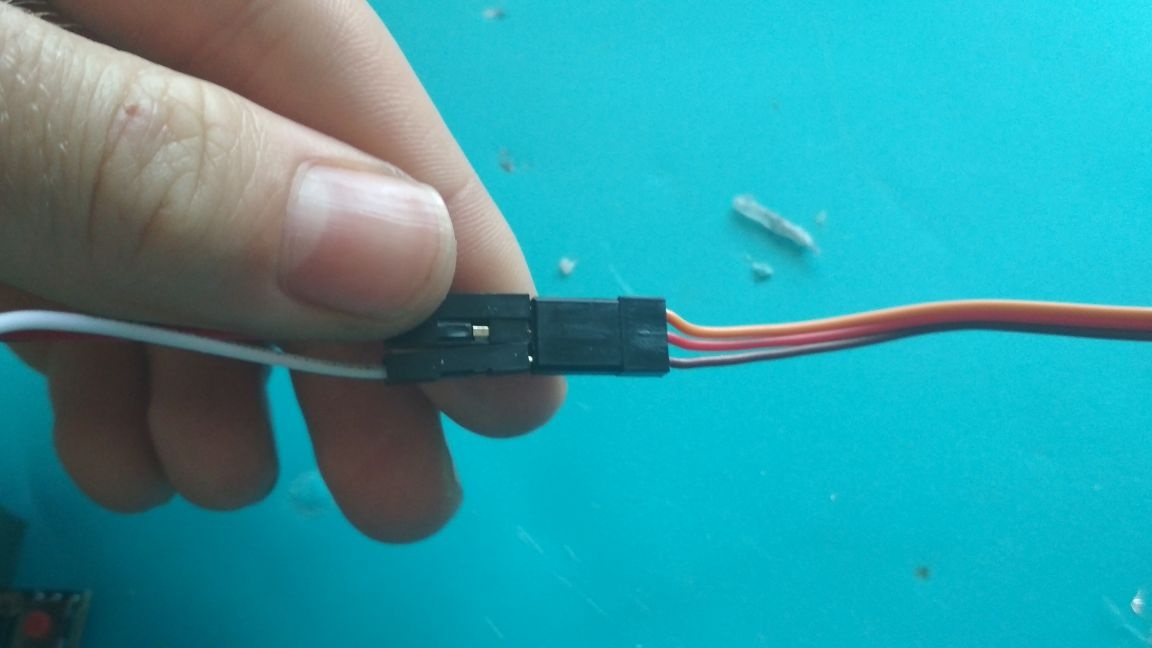
Adicione os fios de conexão ao servomotor e conecte-o ao arduino da seguinte maneira:
Fio marrom para gnd
vermelho para 5v
laranja para 9 pinos
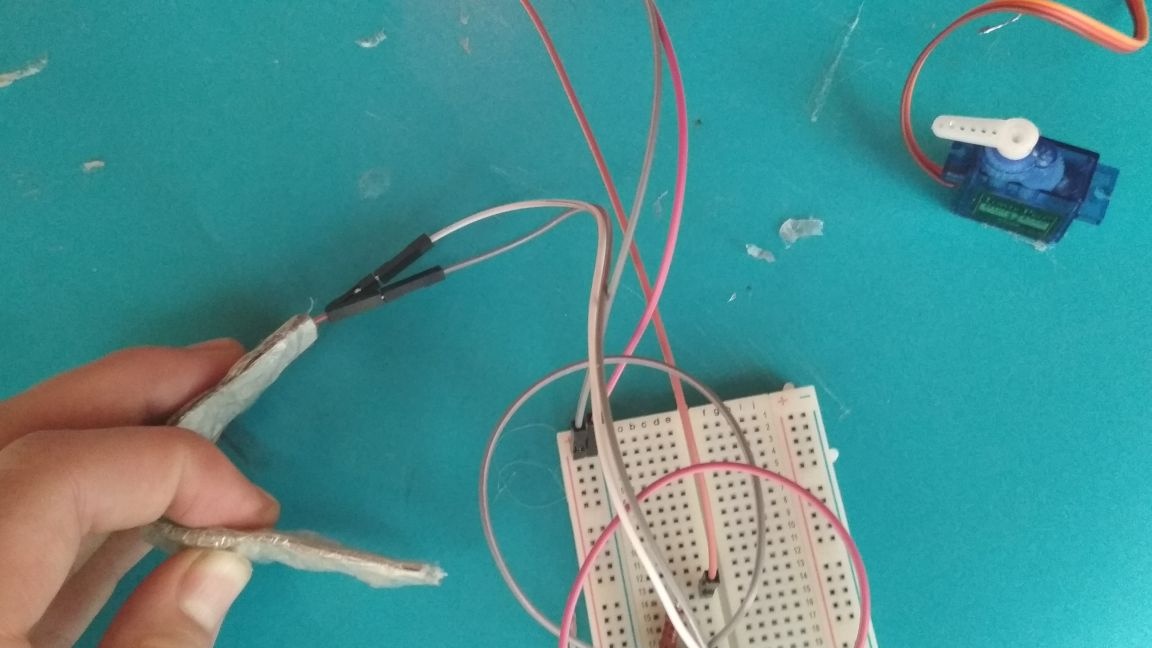
Ao nosso sensor de curvatura, adicione dois fios de pai para pai

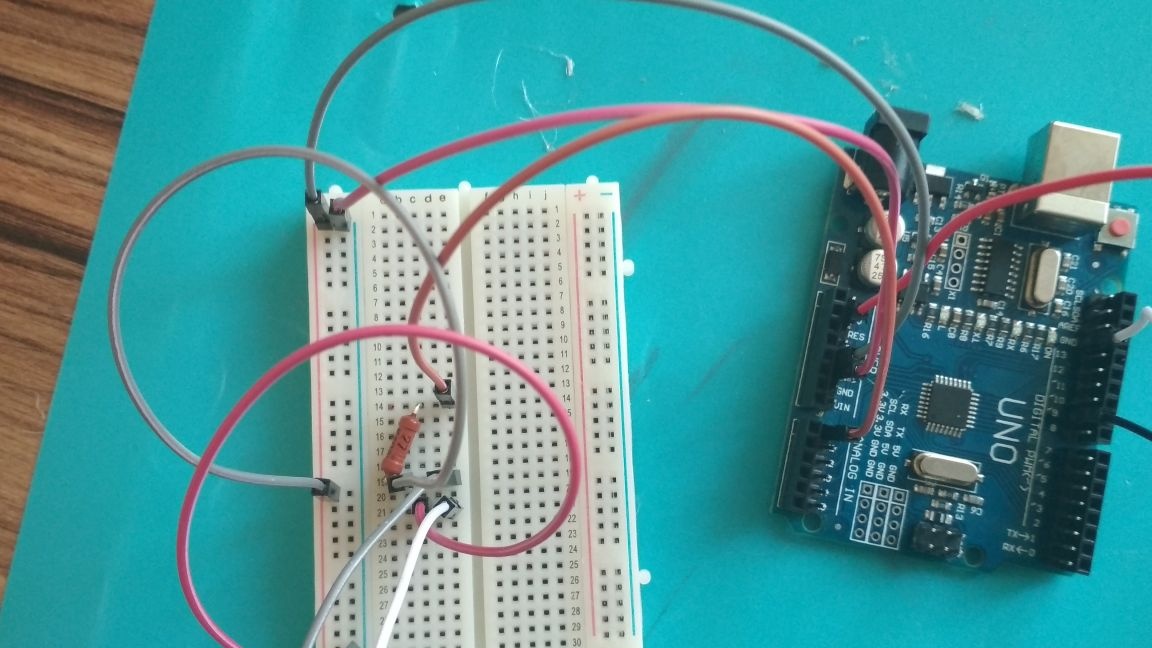
Conecte-os à tábua de pão:
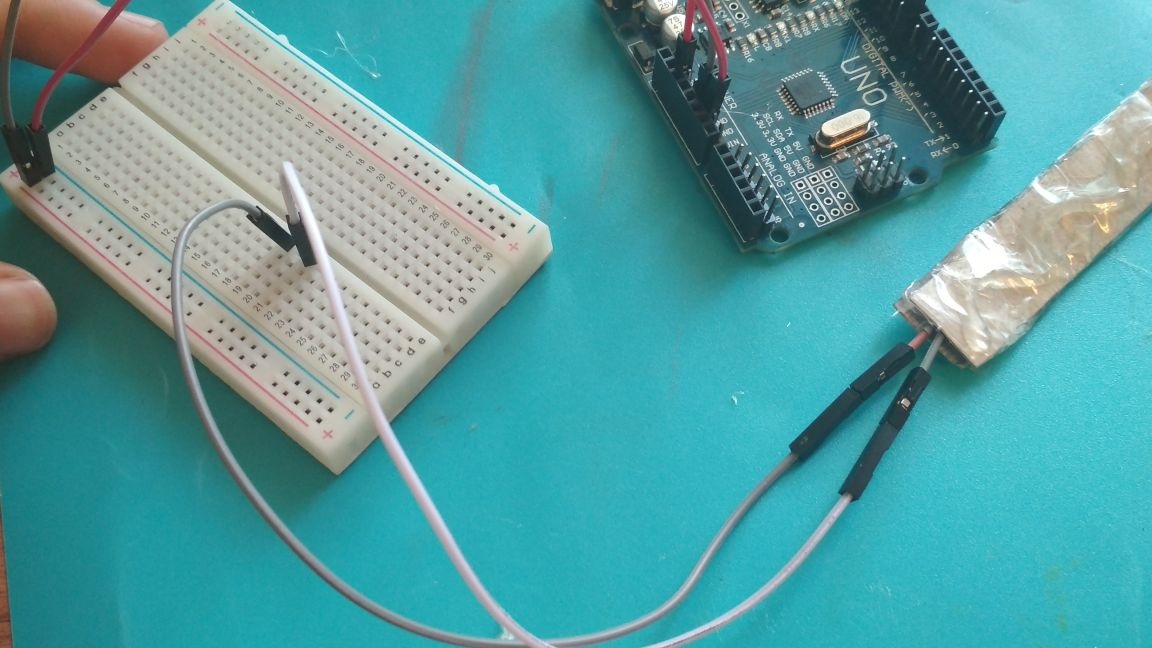
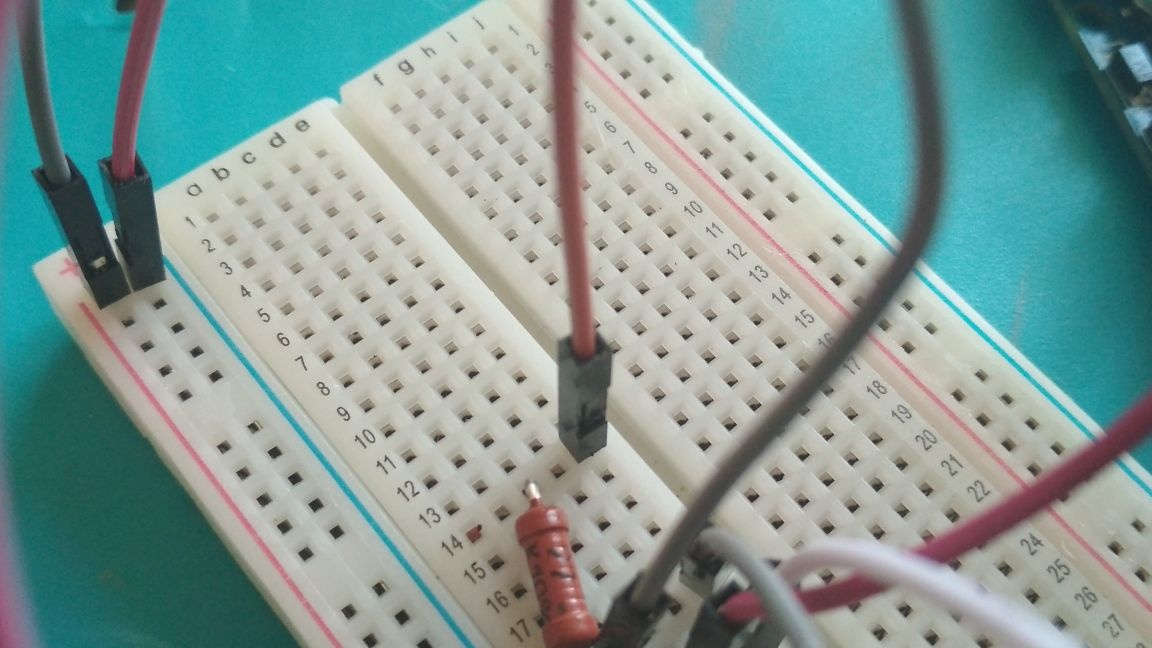
Uma das extremidades do sensor está conectada ao sinal de adição da placa de ensaio por meio de um resistor de 22 quilo-ohms (infelizmente eu o misturei e o conectei a outra saída, mas isso não respondeu à operabilidade) e o outro ao menos:
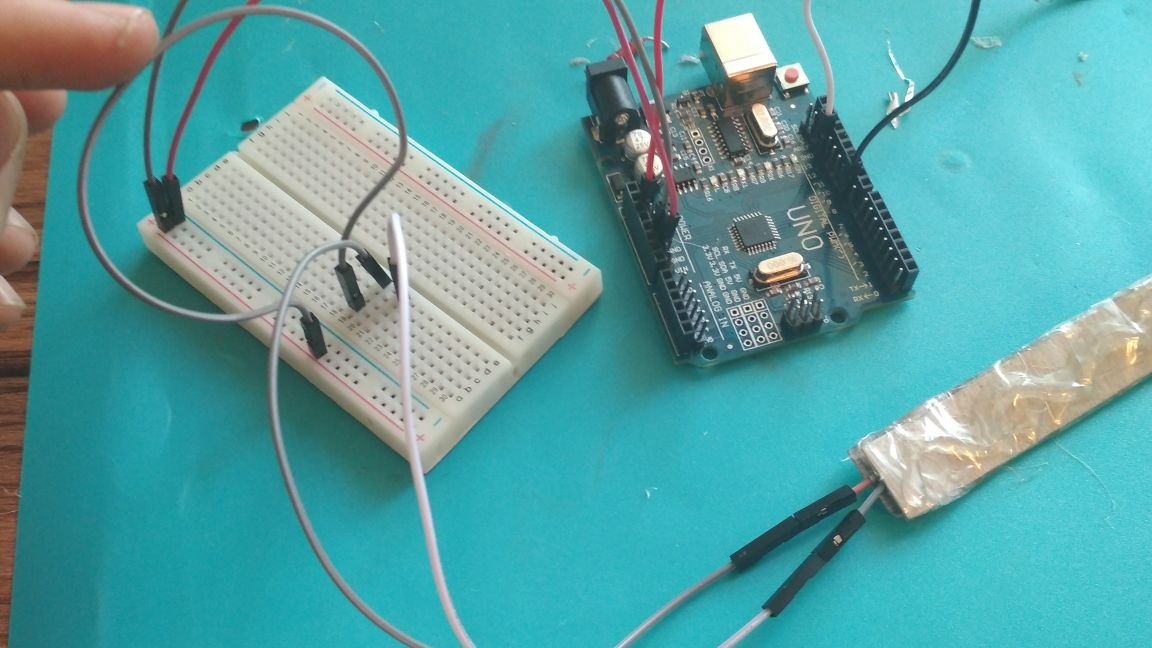
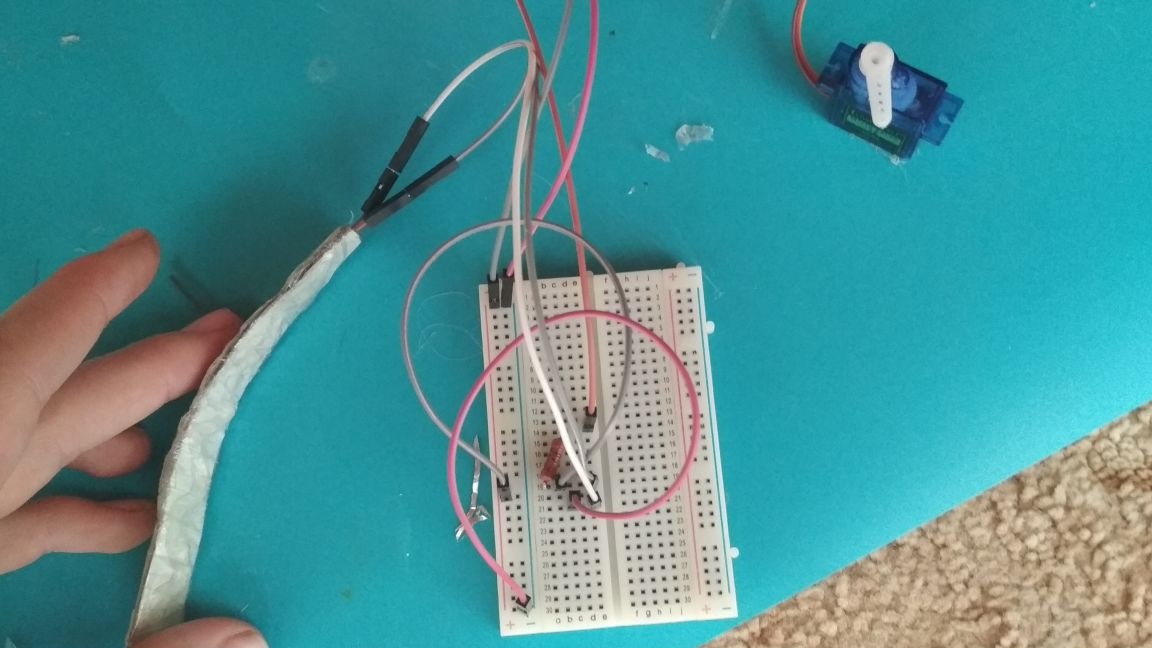
Na linha de pão em que a extremidade do sensor conectado ao sinal de adição está localizada, adicione outro fio e faça a saída para a saída A0 no Arduino:
Agora, conectamos o Arduino ao computador, inicie o IDE do Arduino e carregue o seguinte esboço:
#include
Servo servo1;
const int flexpin = 0;
configuração nula ()
{
Serial.begin (9600);
servo1.attach (9);
}
loop vazio ()
{
int flexposição;
int servoposição;
flexposição = analogRead (flexpin);
servoposição = mapa (flexposição, 1018, 1023, 0, 90);
servoposição = restrição (servoposição, 0, 90);
servo1.write (servoposição);
Serial.print ("sensor:");
Serial.print (flexposição);
Serial.print ("servo:");
Serial.println (servoposição);
atraso (1000);
}Ligue o monitor de porta ao qual o Arduino está conectado e carregue o esboço

Agora, observamos as alterações que ocorrem no monitor de porta quando nosso sensor se dobra, vemos que 1023 é 90 graus e 1020 e 1019 são 0; portanto, no meu caso, altero o número 1018 no esboço para 1020, você pode ter um diferente. Agora 1020 são 0 graus e 1023 são 90 graus. Após todas as alterações, carregue o novo esboço personalizado na placa do Arduino


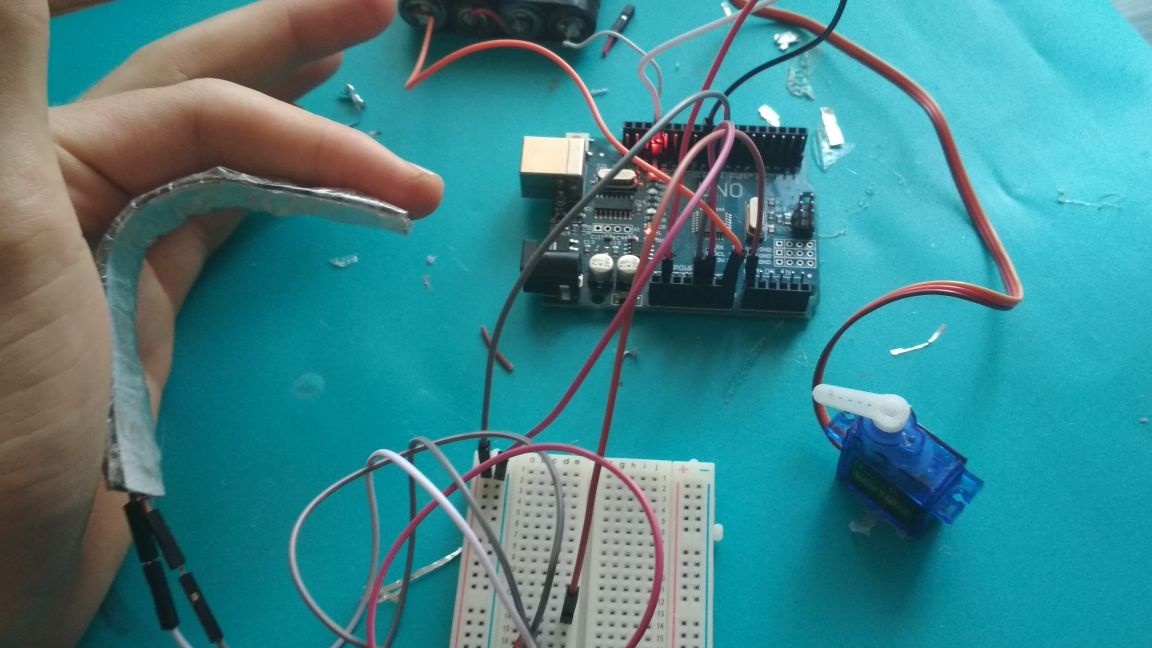
Bem, é isso! Nosso sensor de dobra mais simples e mais importante está pronto!
Se tudo for feito corretamente, quando o sensor estiver dobrado, o servoconversor fará uma curva de 90 graus e, quando estendido, retornará à sua posição original. Obviamente, a precisão desse sensor é inferior à adquirida, mas é adequada para projetos que não são particularmente confusos e, além disso, se você fizer tudo com cuidado e ajustá-lo, ele acabará quase como comprado. Espero que este artigo seja útil para alguém.
Obrigado a todos pela atenção!