


Participei do meu projeto com as instruções de montagem do Lego Technic 42029. O resto é minha improvisação. Então precisamos:
- Lego Technic 42029
- Arduino Nano 382P
- DRV 8833 (melhor que Populus, mas você também pode ter uma contraparte chinesa)
- 2 servoconversores SG-90
- receptor IR
- Caixa de engrenagens do motor 200 rpm
- 2 LEDs
- 2 resistores de 150 ohms
- Capacitor 10v 1000uF
- 2 pentes de uma linha PLS-40
- 2 conectores PBS-20
- Indutor 68mkGn
- 6 baterias NI-Mn 1.2v 1000mA
- Conector pai-mãe dois pinos para fio
- Homutik
- Fios de cores diferentes
- solda
- Rosin
- faca de papelaria
- ferro de soldar
- Parafusos 3x40 e porcas e arruelas para eles
- Parafusos 3x60
- Pilhas Ni-Mn 1.2v 1000mA 6pcs.
Etapa 1, coletamos a parte de trás da suspensão.
Primeiro, você precisa montar a parte de trás da suspensão de acordo com as instruções da Lego 42029 parte 1, começando de 3 páginas e 8 inclusive. Em seguida, adicione alguns detalhes para poder instalar o motor e a caixa de velocidades.

Etapa 2 suspensão dianteira.
Montamos a parte frontal da suspensão de acordo com as instruções da Lego 42029 parte 1, da página 21 à 23. Pegamos o trapézio da segunda parte das instruções da Lego da página 6 à 11. Montamos o guincho da segunda parte da página 14 - 22. E a parte do pára-choques da segunda é de 34 a 36 páginas.
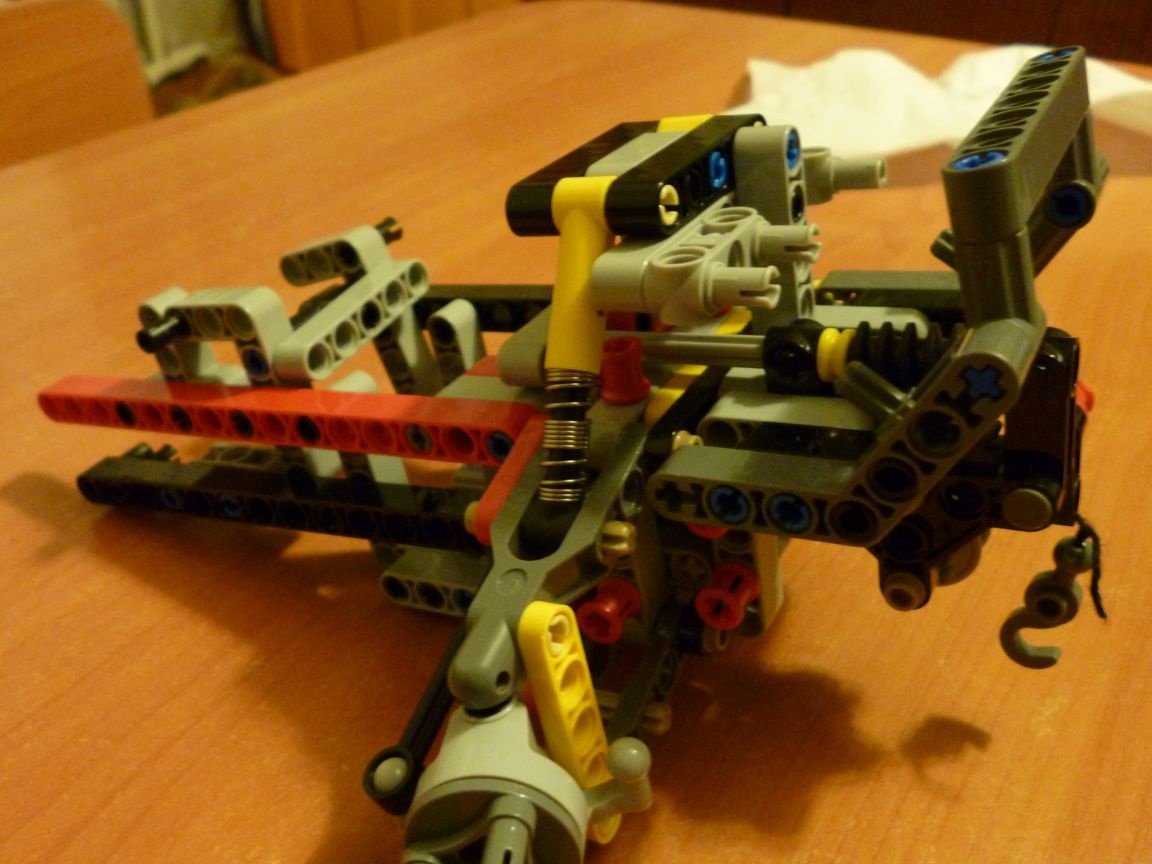
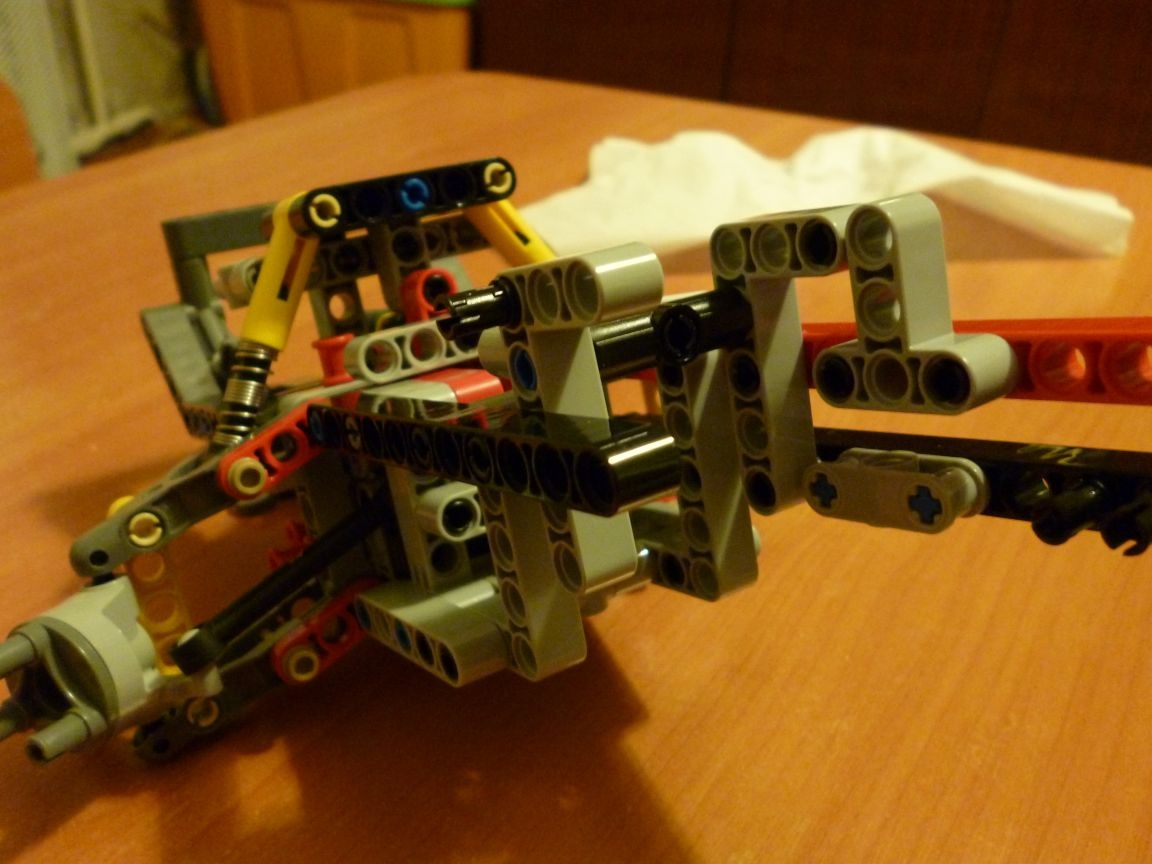
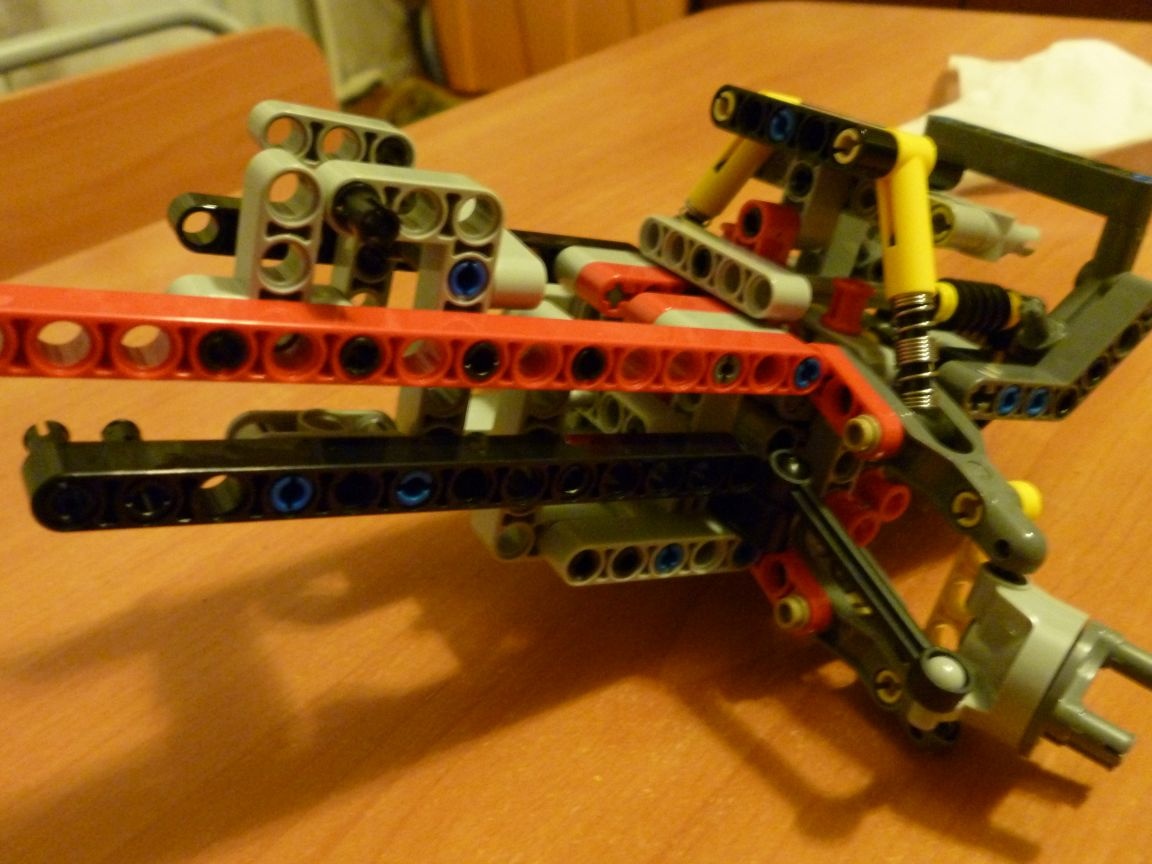

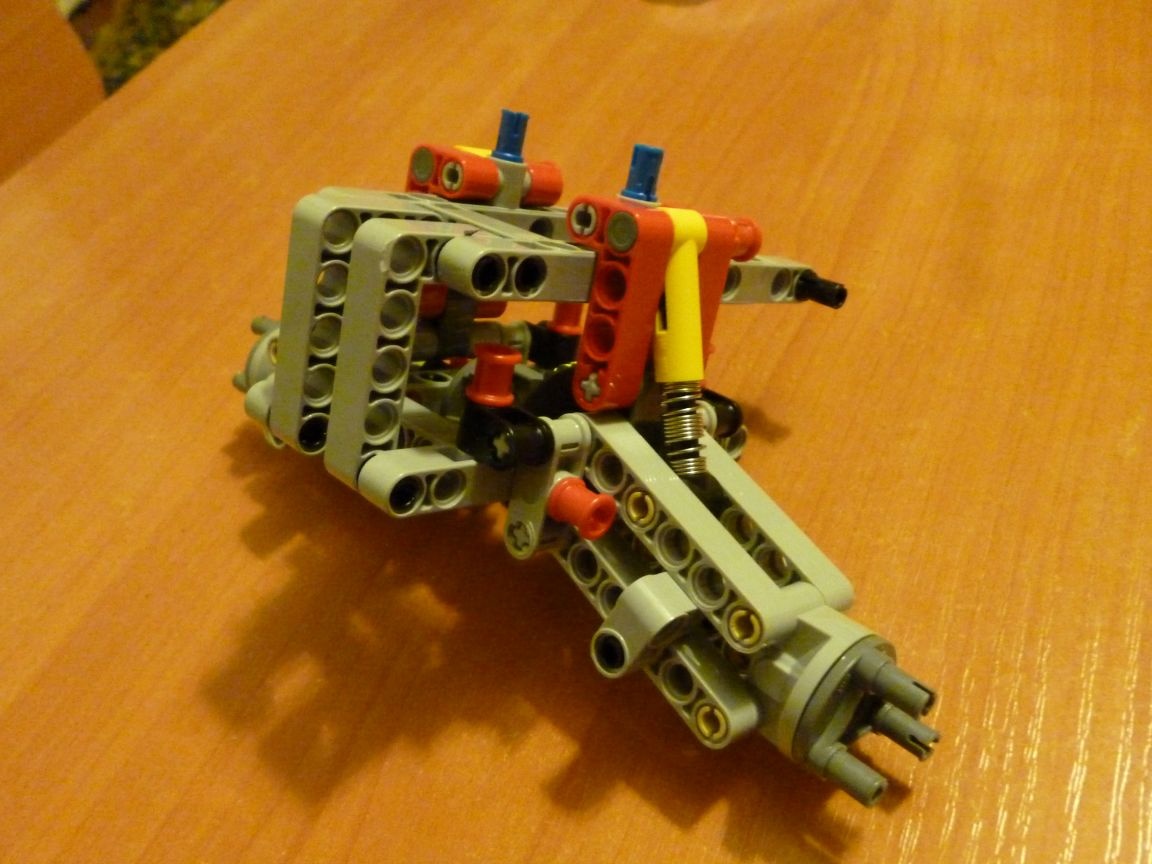
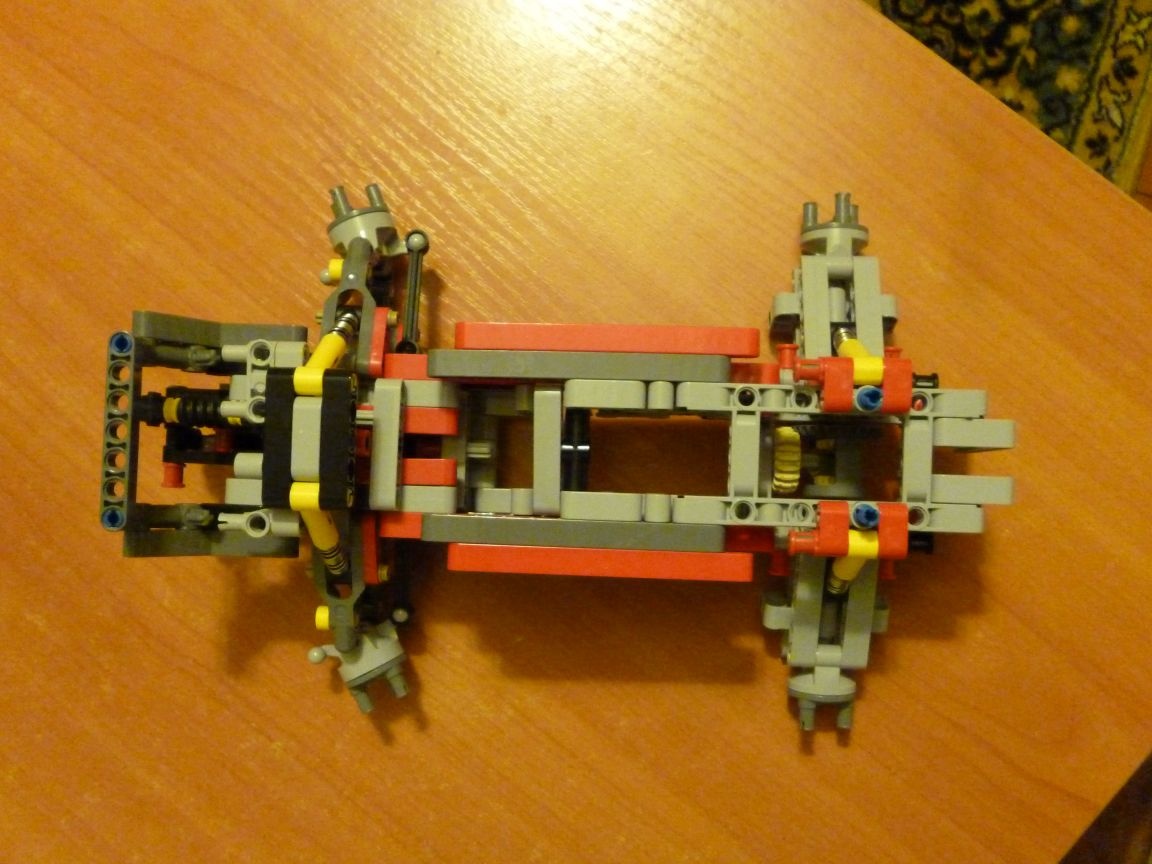
Etapa 3 monte o chassi.
Conectamos as duas partes, como mostra a foto:

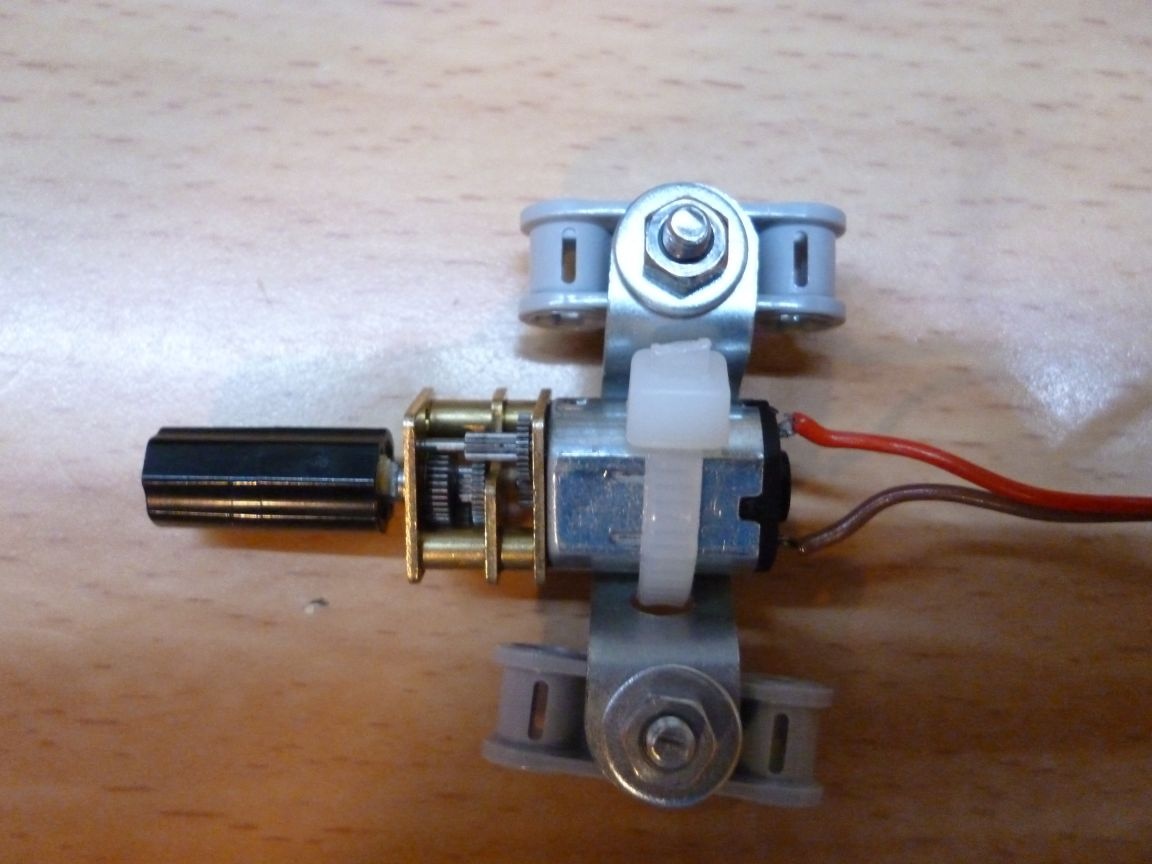
Resolvi o problema de conectar o moto-redutor com as peças do projetista da seguinte maneira: coloquei a luva de conexão no eixo do redutor e inseri um pedaço de fósforo para fixação. Para montar o motor de engrenagens, usava plástico metálico de um projetista de ferro e um grampo.
O resultado foi o seguinte:
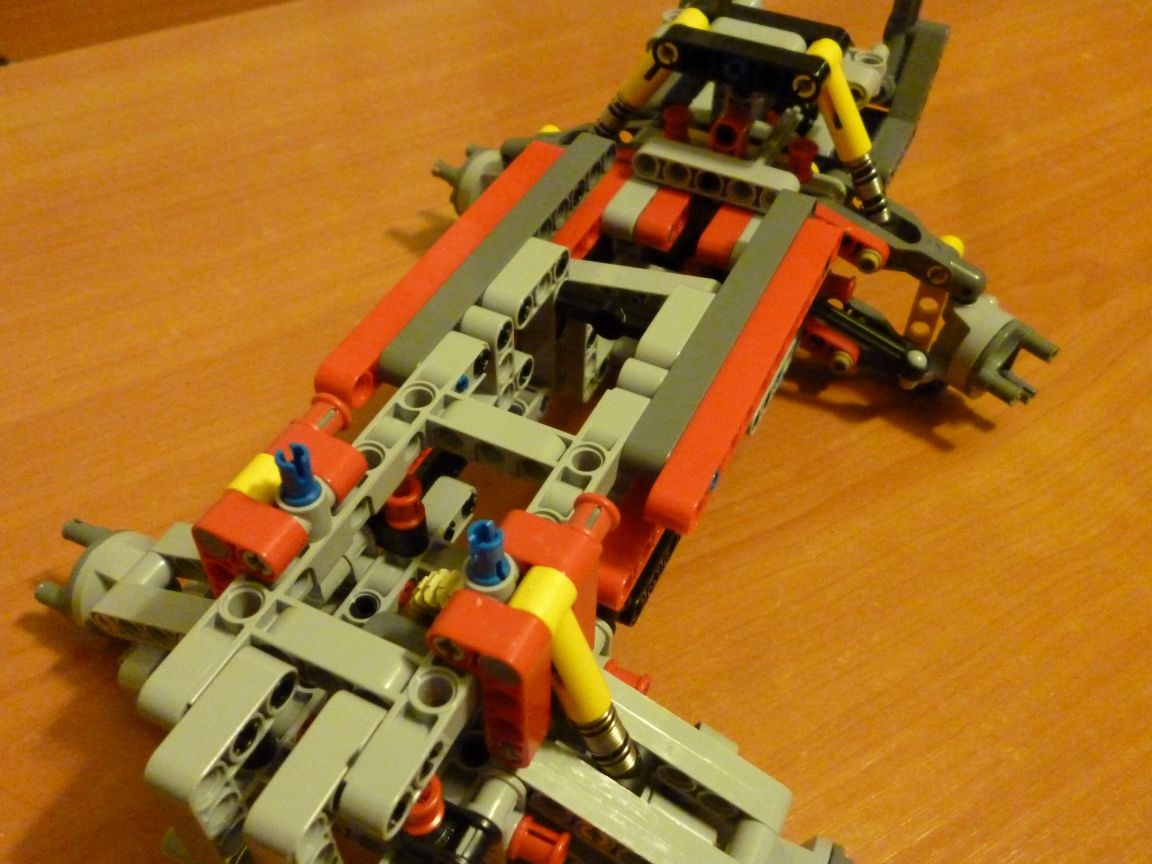
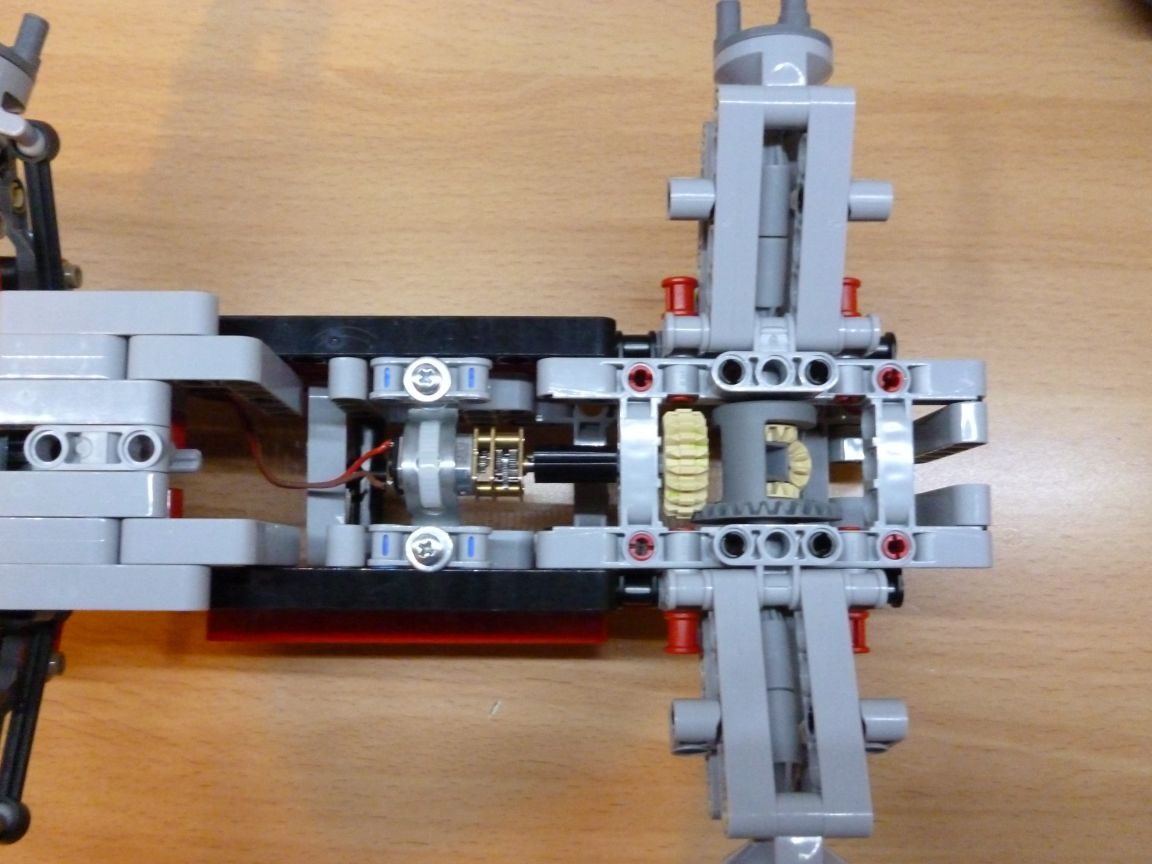
Monte no chassi:
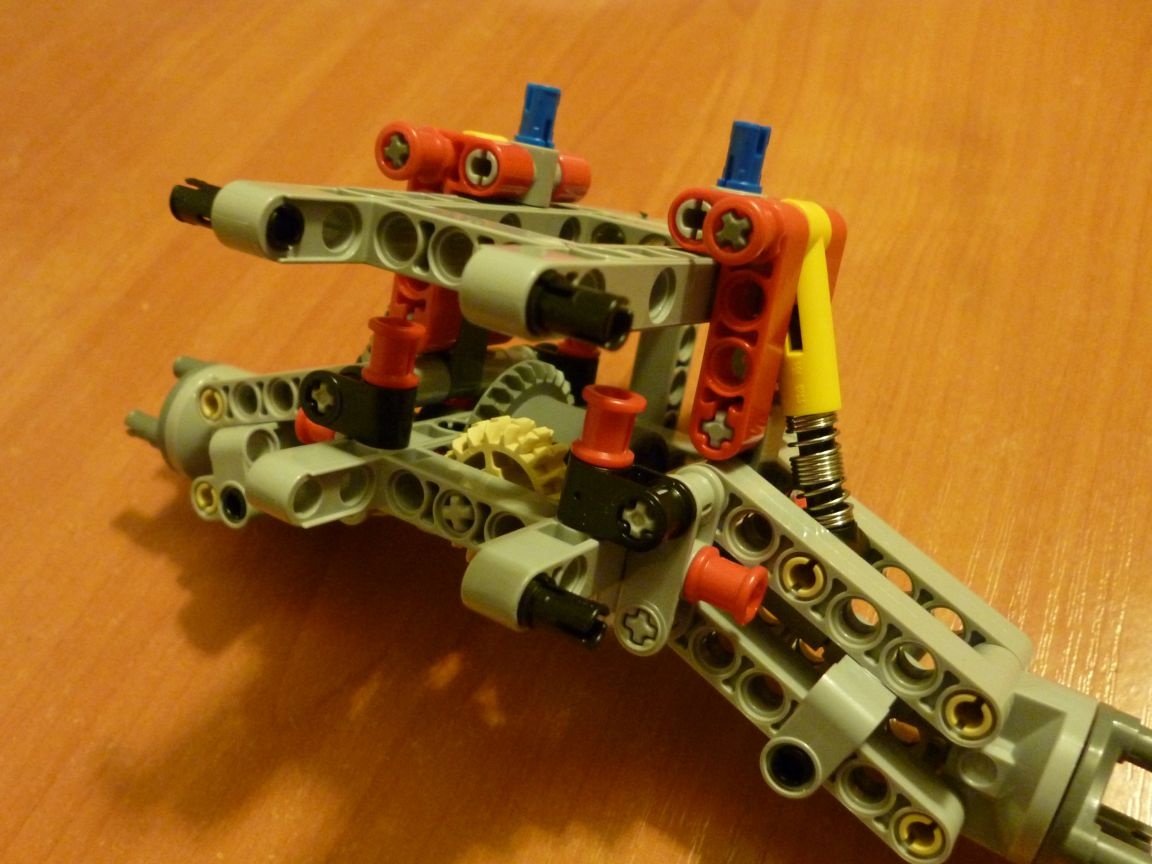
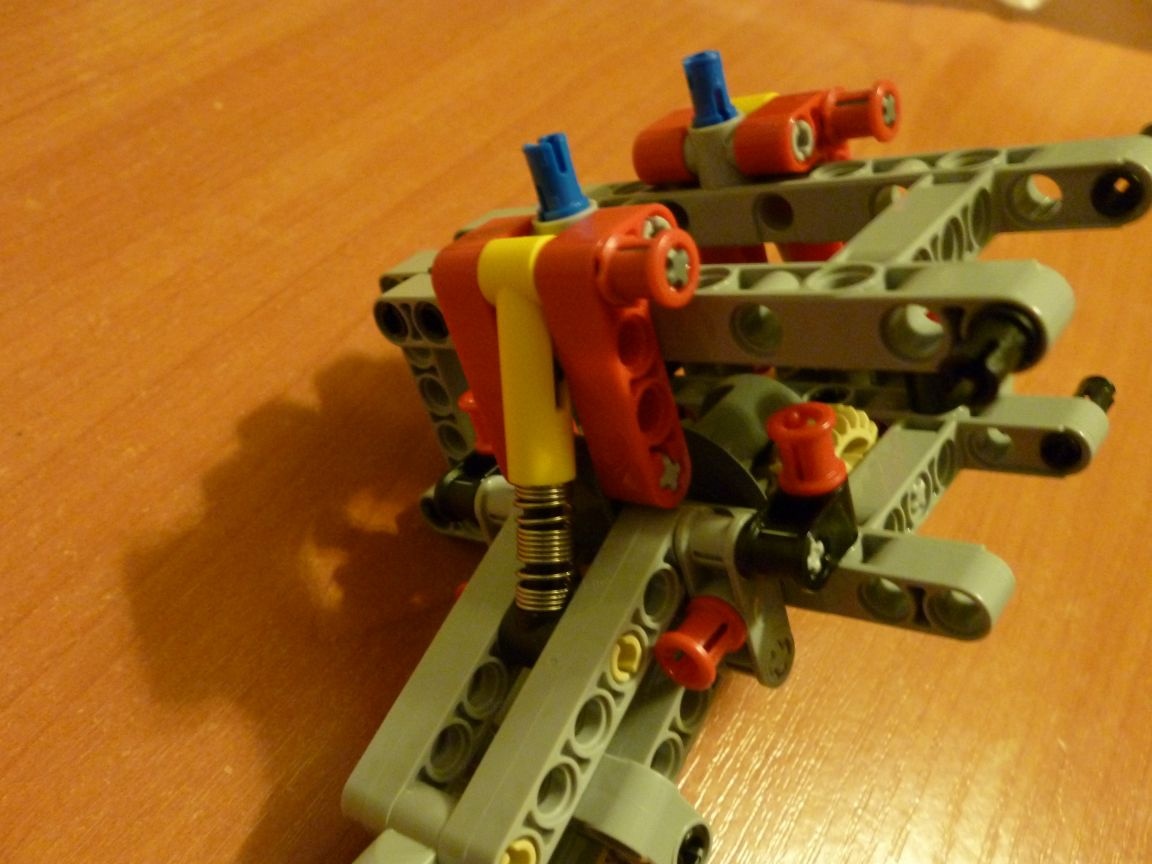
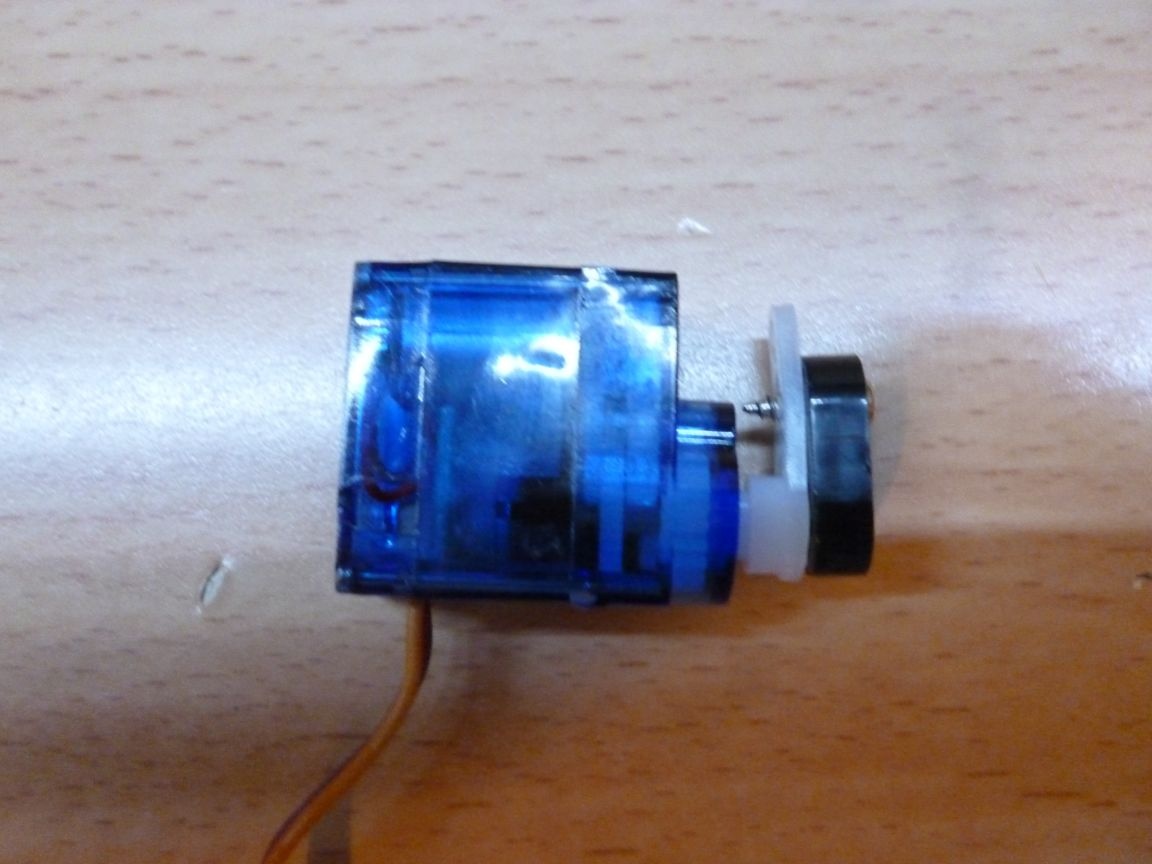
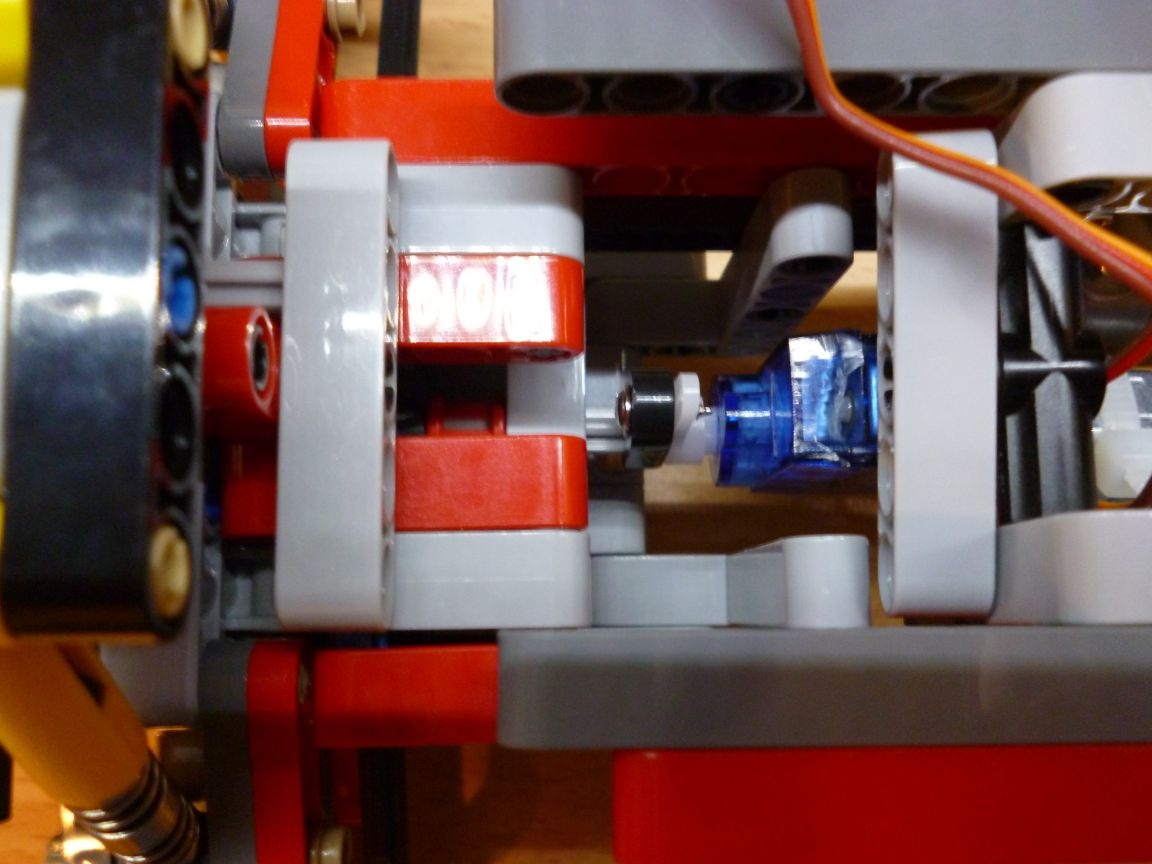
Para realizar a rotação levou o servo SG-90. É necessário perfurar com cuidado, para não tocar nas partes internas, em um furo passante com diâmetro de 3,2 mm ou apenas cortar com uma faca de papelaria. E também corte as partes salientes (“asas” para fixação). Nós inserimos um parafuso no buraco feito e o fixamos com porcas. No eixo do servo, colocamos uma alavanca com uma parte parafusada do lego:
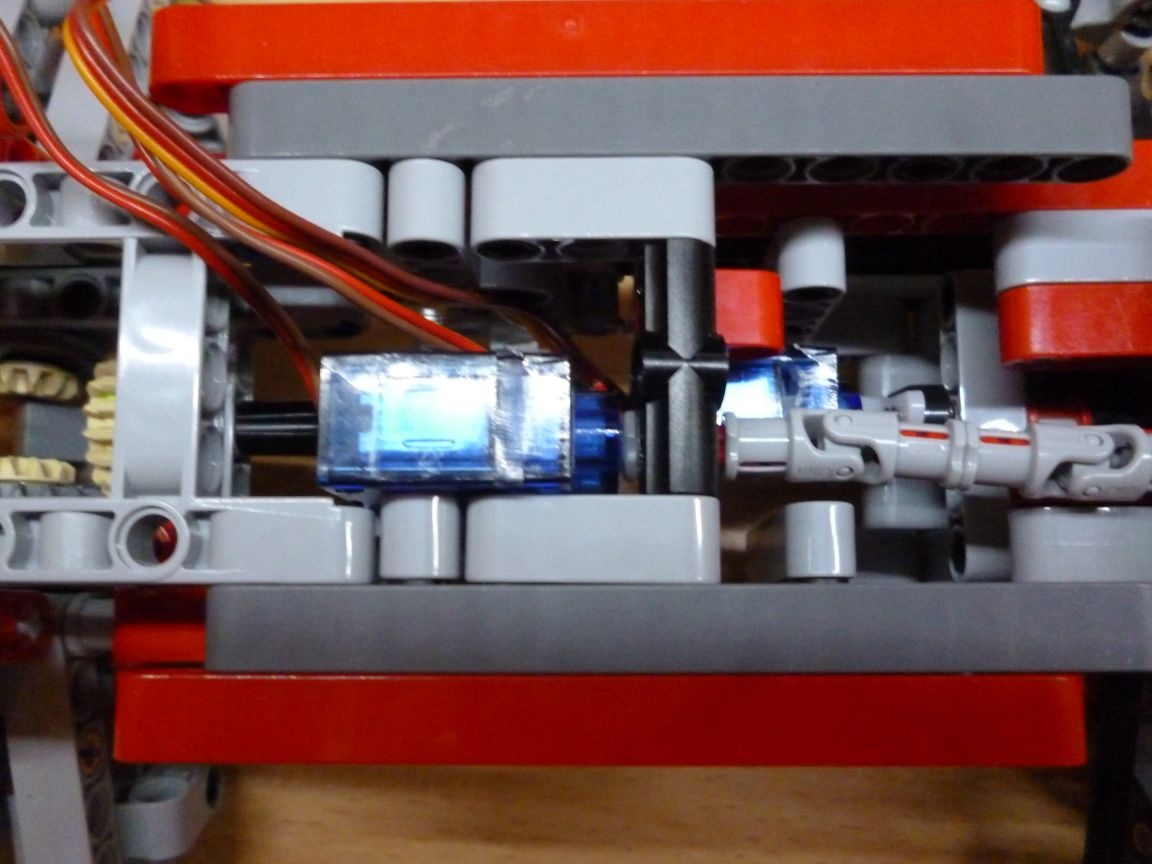
Instalar:
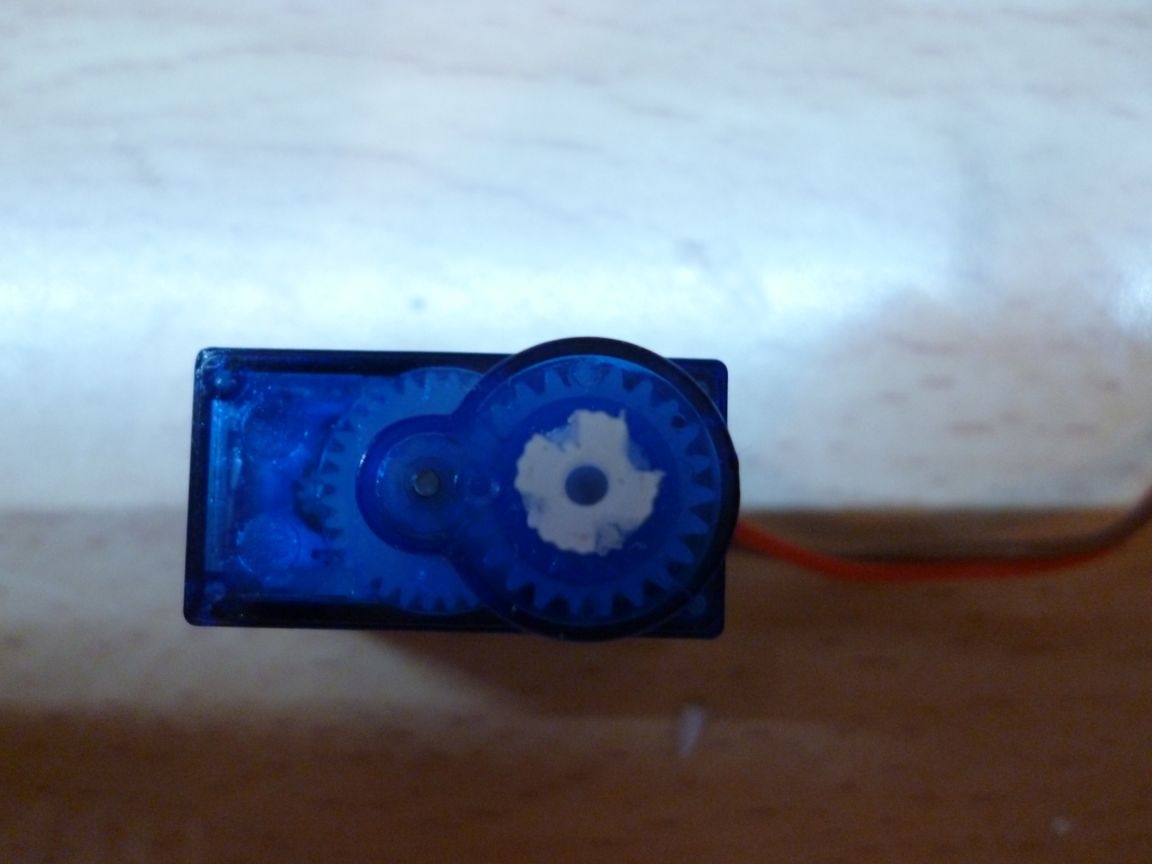
Usaremos o segundo servo para o guincho. Fazemos o mesmo que com o primeiro. E agora, ele precisa ser modernizado para rodar livremente. Para isso, desmontamos o servoconversor, removemos a placa e soldamos os fios diretamente no motor. Tiramos a engrenagem principal e cortamos as paradas de viagem.E, finalmente, fazemos um slot com uma faca de escritório na engrenagem principal, como na foto:
Conectamos ao nosso guincho e colocamos o chassi:

Etapa 4 Gerenciando o controlador
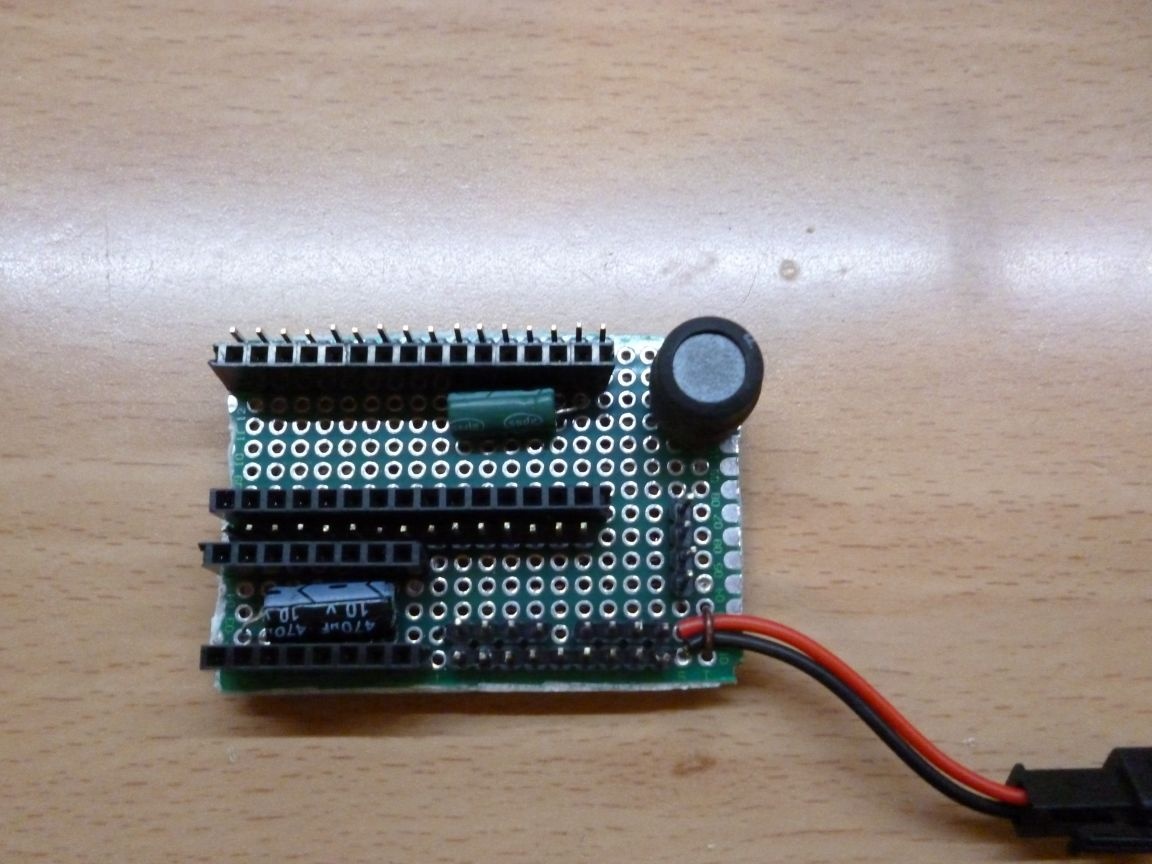
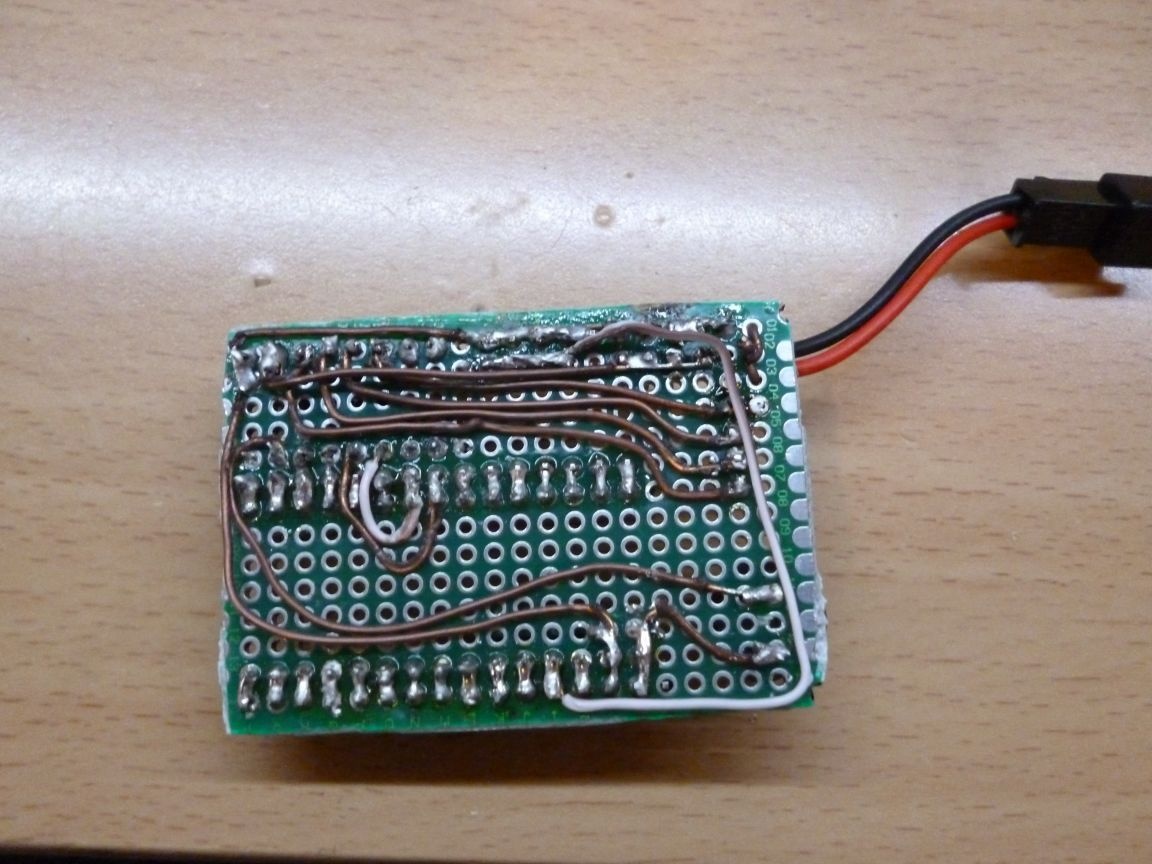
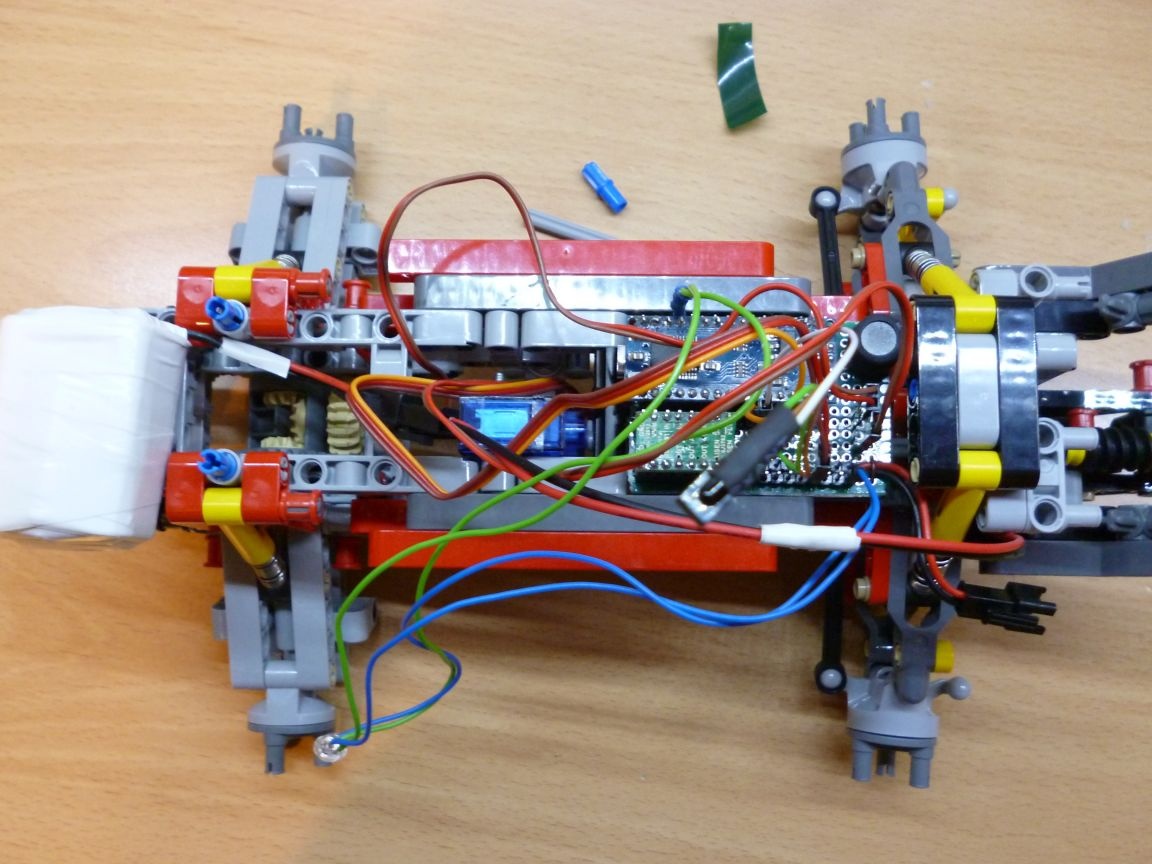
Para controle, usaremos o Arduino e o receptor de IR. Tomamos um ferro de soldar e montamos o seguinte na placa de circuito:
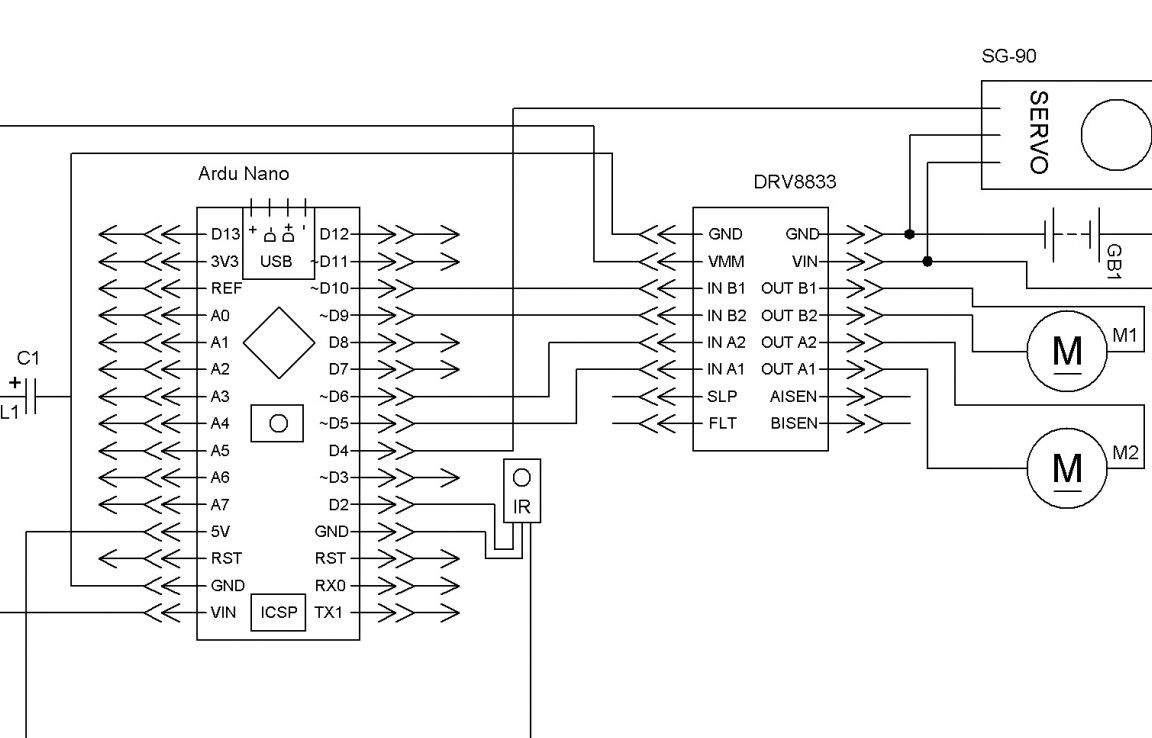
Eu explico: qualquer capacitor de baixa potência, a bobina de indutância que você também encontrará, precisará estabilizar a tensão do microcontrolador. Os resistores são selecionados para os LEDs usados. O receptor de infravermelho ou o TSOP pode ser retirado de um brinquedo antigo ou comprado em uma loja de rádio. Se houver forte interferência, adicione um capacitor ao circuito de potência do receptor de IR.
Como resultado, obtemos:
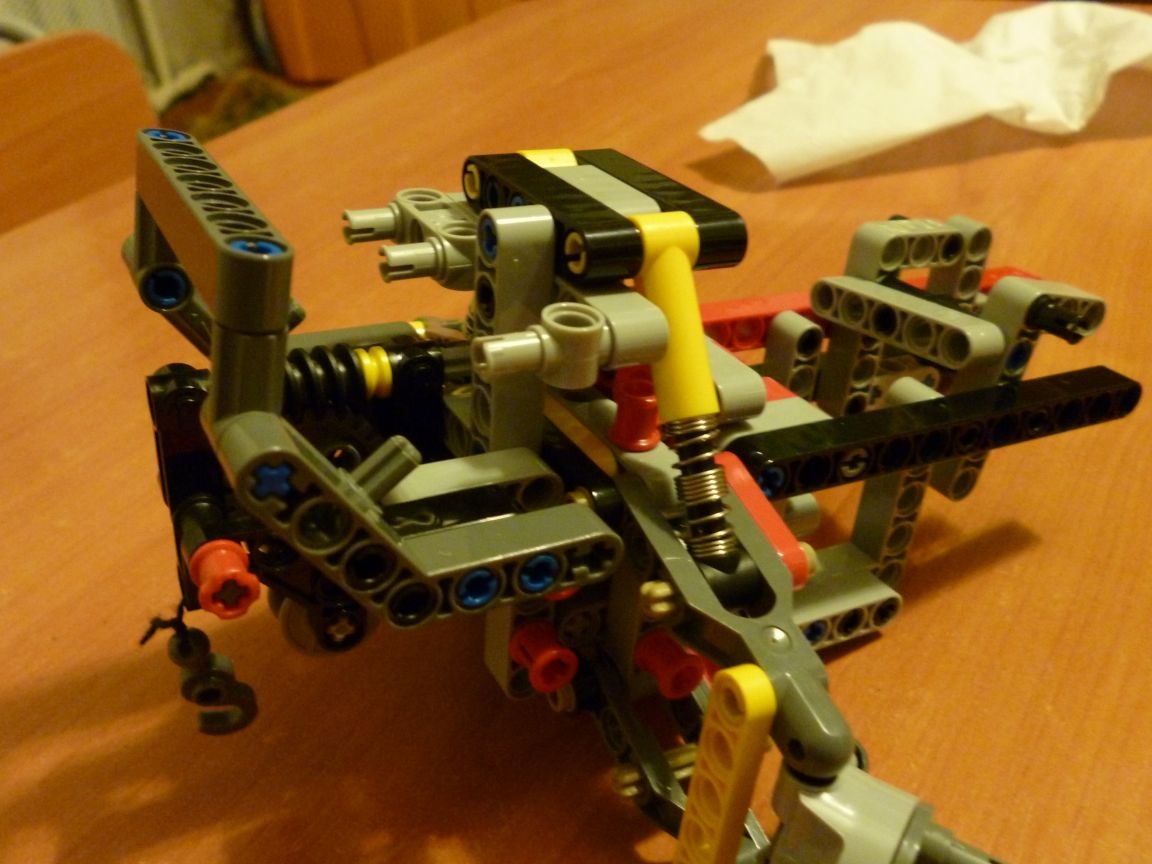
Instalamos o Arduino Nano e o DRV 8833 em seus locais:
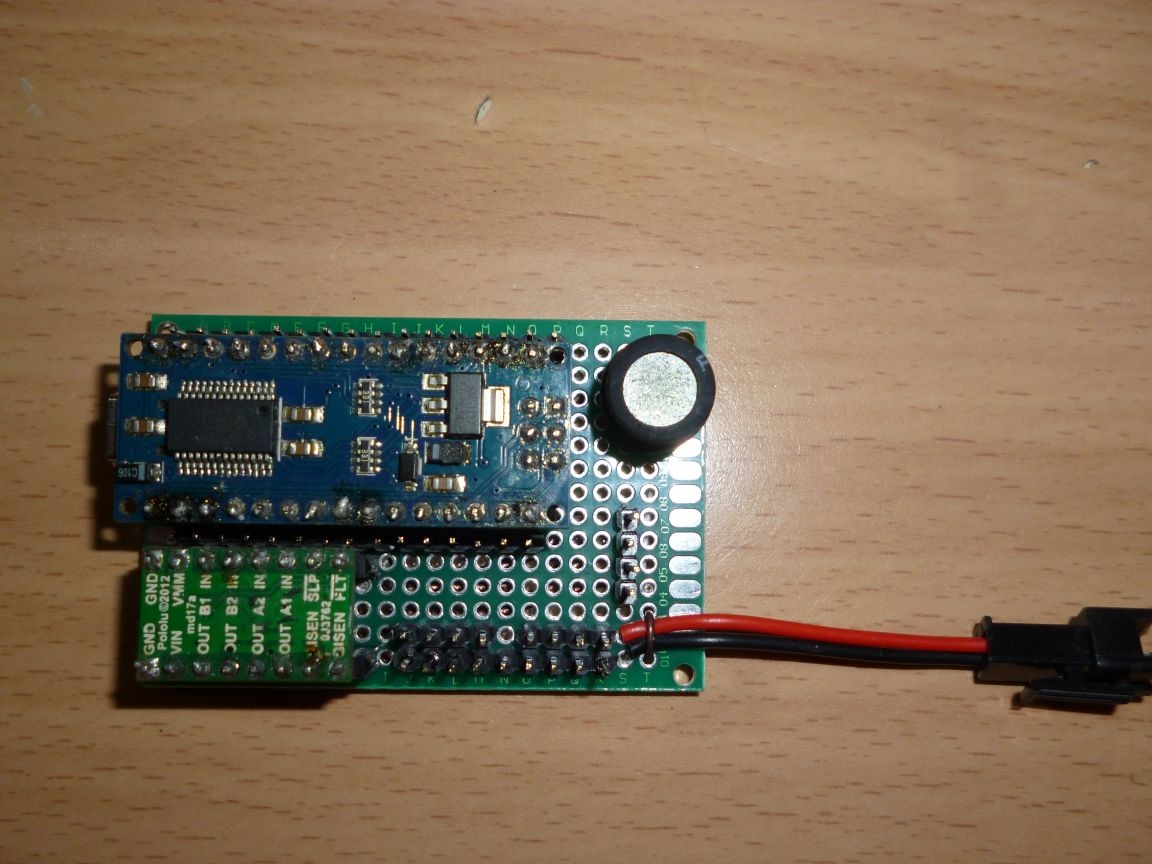
E coloque a placa no chassi:
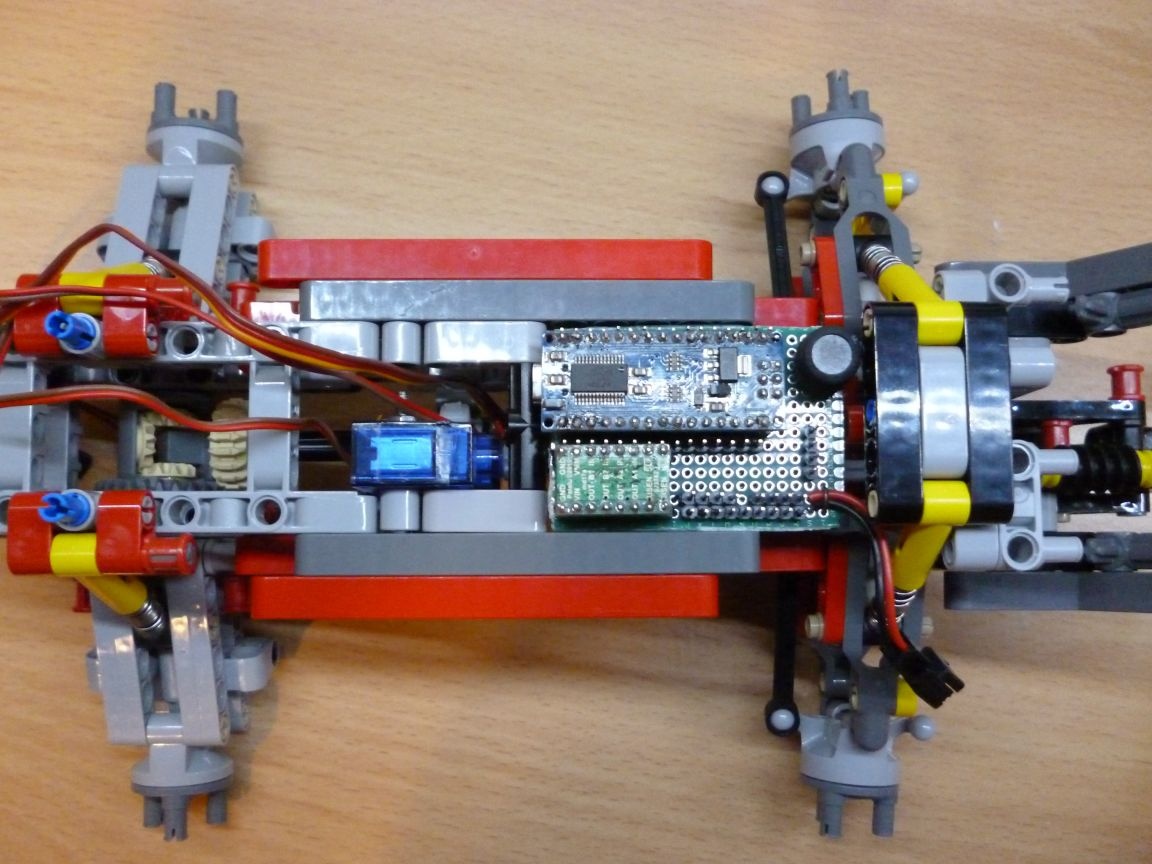
Fonte de alimentação - 6 baterias Ni-Mn 1.2v 1000mA. É necessário soldá-los em série e enrolá-los com fita isolante. Cole uma fita dupla face na parte traseira do chassi.
Conectamos toda a nossa estrutura:
Etapa 5 Cabine
A cabine é pessoalmente minha improvisação, não há instruções prontas, então você precisa coletar as fotografias.



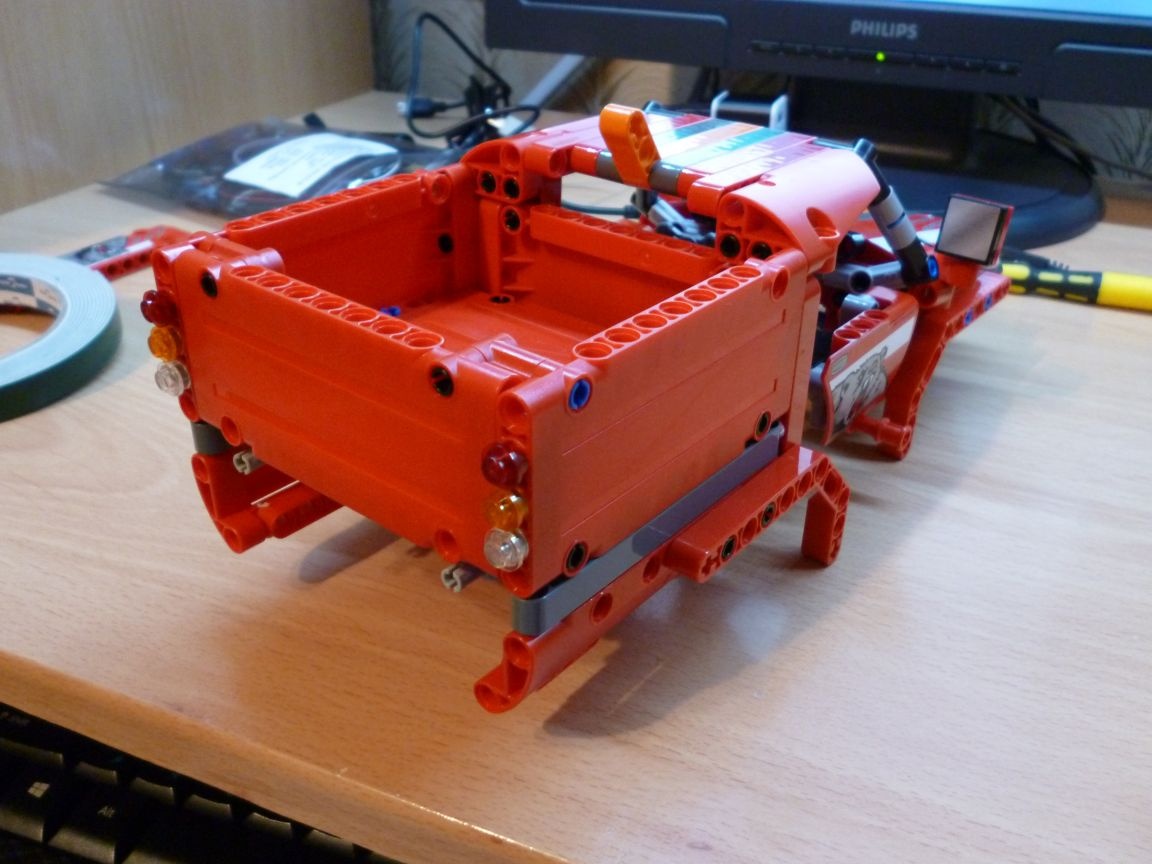
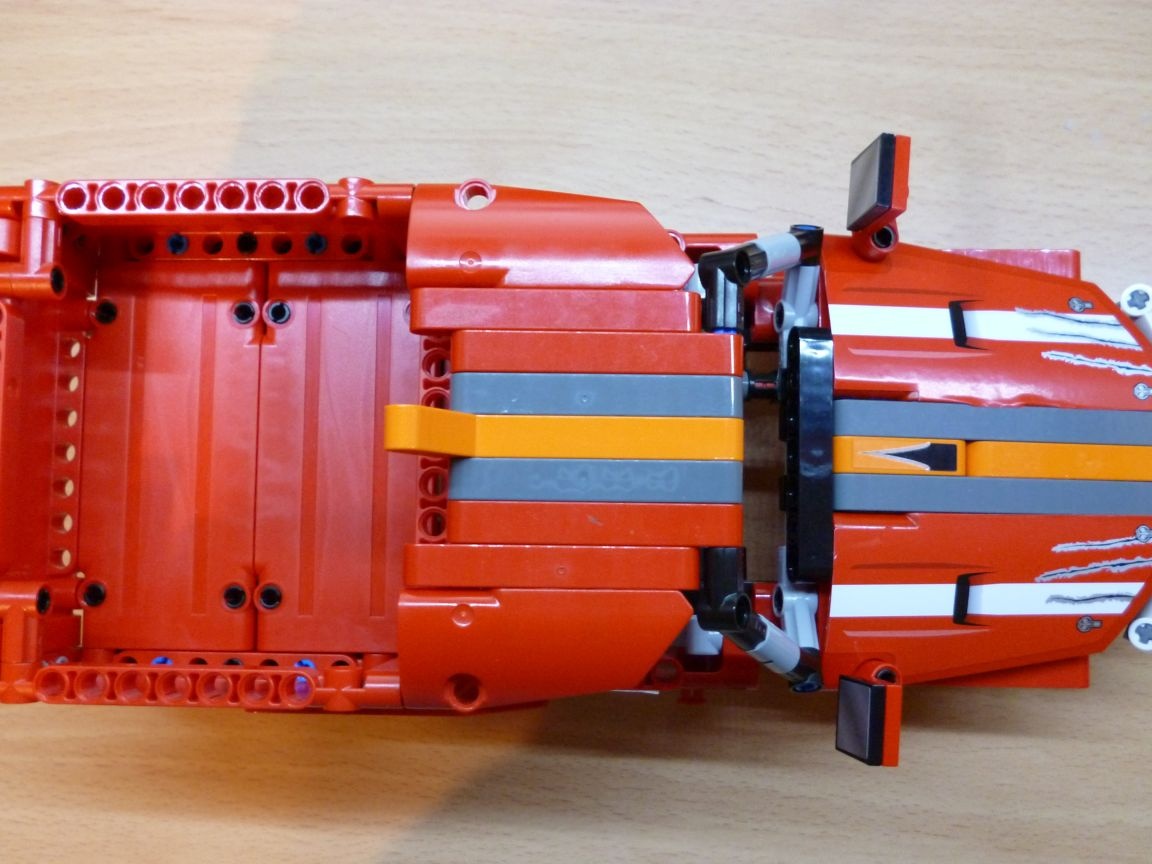
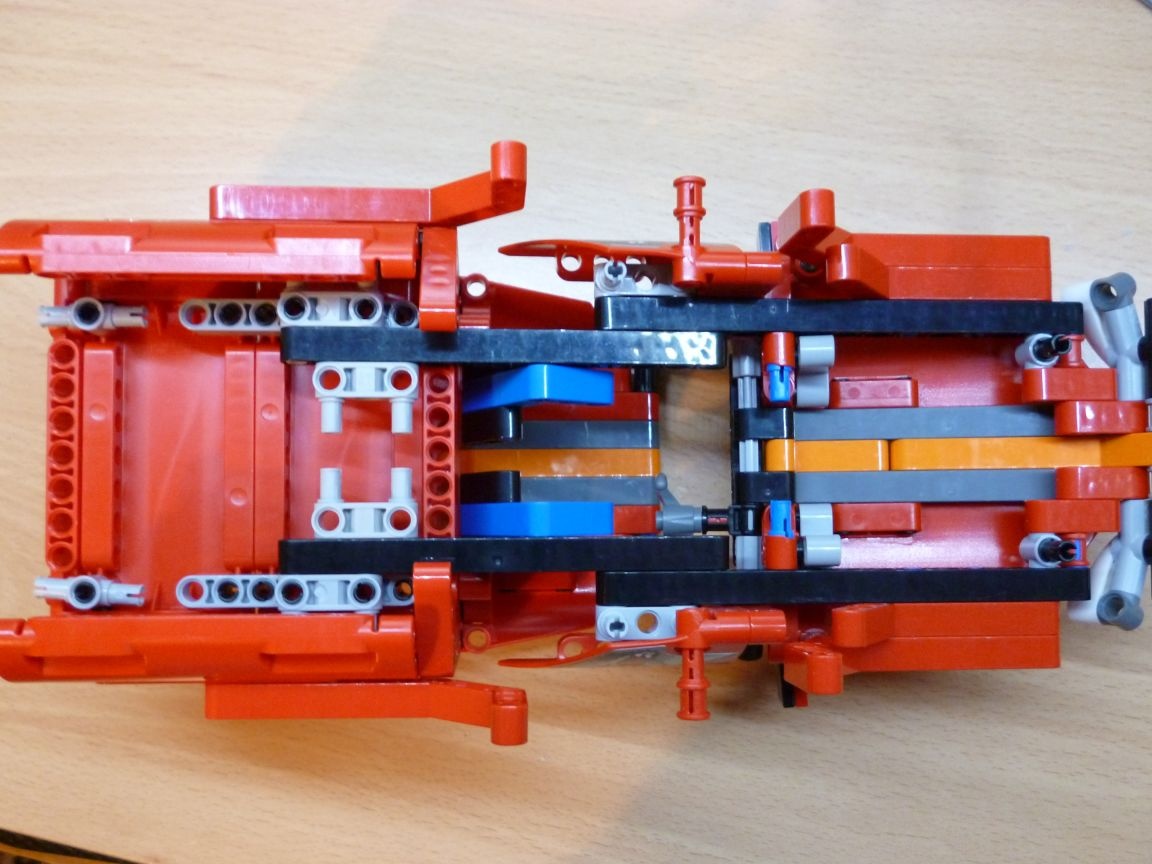
Você pode montar sua própria versão, basta encaixá-la sob o chassi. O principal aqui é combinar a montagem com o chassi. Há quatro deles e eles são claramente visíveis na foto, na parte inferior da cabine.
Etapa 6 firmware.
Hoje, no entanto, como sempre, eu programo no IDE do Arduino. Primeiro você precisa preencher meu firmware e, através do terminal, examinar os códigos de controle remoto que você usará. Você pode pegar qualquer controle remoto de infravermelho, por exemplo, de uma TV, DVD ou montar o seu (eu tenho um controle remoto caseiro do joystick da Sega). Ao pressionar um botão, no terminal, veremos o código do botão pressionado, escrevê-lo em um pedaço de papel. Fazemos isso com todos os botões nos quais queremos programar as ações. Em seguida, edite o esboço. Anotamos nossos códigos para as ações necessárias e o exibimos novamente. Este firmware está configurado no meu controle remoto do joystick da Sega. No processo de brincar com a máquina, notei algumas nuances ou inconvenientes. É difícil obter uma recepção confiável de comandos IR durante o movimento. E acontece assim: pressione a seta para a frente, a máquina recebeu um comando para avançar e correu para a frente, soltou a seta, mas não recebeu um comando de parada e continua a dirigir até travar ou travar, está repleta de avarias. Parcialmente, esse problema pode ser resolvido aumentando o número de novas tentativas de envio de um comando; no entanto, isso só é possível quando você mesmo usa o controle remoto. Mas vou escolher uma solução mais importante - passarei a usar um transmissor - receptor de 433MHz. Vou escrever sobre isso no próximo artigo.
Passo 7 colocar nas rodas.
Então, nós apenas temos que colocar a cabine no chassi, colocar nas rodas e verificar o nosso SUV em ação.

