


Mas primeiro, vamos descobrir o que é e por que é necessário. De fato, seu nome nos diz seu propósito. É formado a partir da palavra latina curvus, que significa curvada ou ondulada. Ou seja, um curvímetro é um medidor de distância de roda ou rolo. Dois tipos de curvímetros são distinguidos: pequeno (cartográfico), que geralmente é usado para medições no mapa, e grande (estrada), que geralmente são usados para medir o comprimento de seções curvas de rodovias já. Eles podem ser usados sempre que for inconveniente ou impossível medir com a roleta padrão; portanto, o projeto promete ser interessante.
A primeira coisa a tomar cuidado ao construir o curvímetro é uma roda ou rolo. Ele deve ser pequeno o suficiente para que a precisão do instrumento seja alta; ao mesmo tempo, deve ser grande o suficiente para que o valor das leituras não seja muito afetado pela irregularidade da superfície medida. No meu caso, a roda tem um diâmetro de 14 centímetros.

Agora você precisa determinar o material e o tamanho da estrutura. Eu usei uma árvore.

Nas barras, fiz uma marcação e fiz os cortes e furos necessários.

Depois montei as peças usinadas usando pequenos parafusos autoatarraxantes.
Agora vamos desviar um pouco do próprio curvímetro e pensar em como essa coisa pode determinar a distância? Tudo é bem simples. Nós apenas precisamos calcular o número de rotações da roda e multiplicar pelo comprimento de sua circunferência externa, e é ainda mais fácil adicionar um valor de comprimento cada vez que a roda faz outra revolução.
Para contar cada revolução no caso mais simples, você pode usar o "contato deslizante". No entanto, eu não recomendo usar esse mecanismo de referência. É muito melhor usar um interruptor de palheta ou um sensor Hall.
É hora de experimentar uma roda. Vou prendê-lo com um parafuso comprido. Encontramos um local no quadro onde o aro da roda está o mais próximo possível e marca com pinceladas. Nessa área, precisamos instalar o interruptor reed.

Na roda, você precisa instalar um pequeno ímã.Certifique-se de que a força dele seja suficiente para fechar os contatos do interruptor reed.
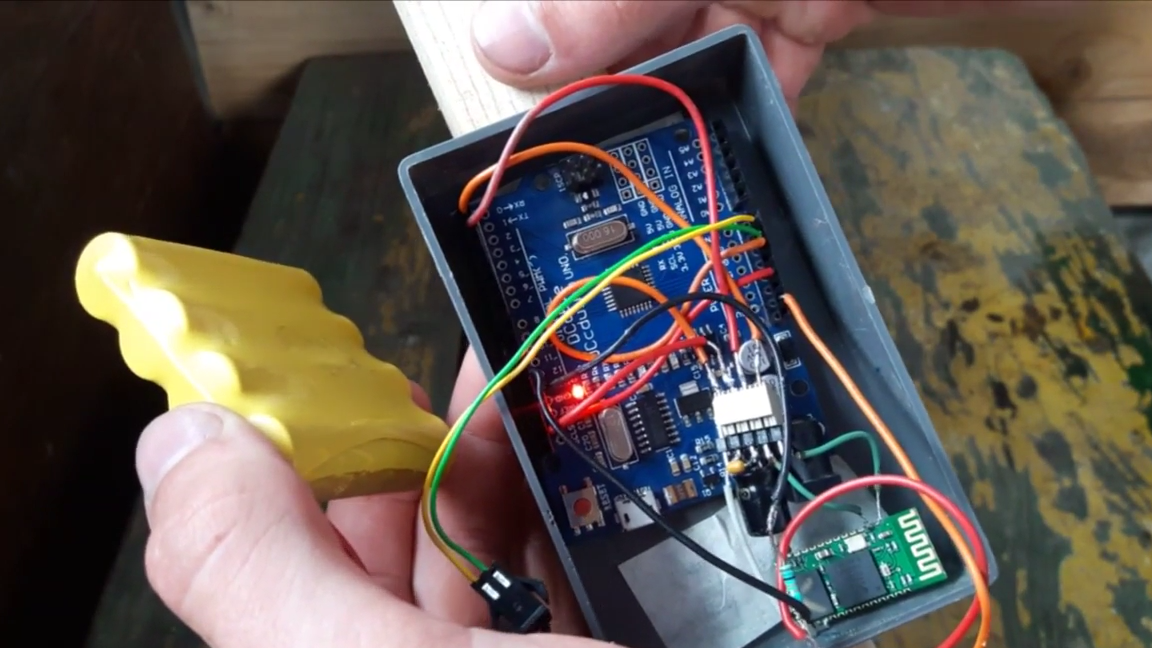
Agora estaremos envolvidos em "cérebros" do sistema. No meu caso, esta é uma taxa Arduino UNO. Ele lerá o status da chave reed e transmitirá dados via conexão Bluetooth, usando o módulo HC-05, para o telefone. A propósito, o interruptor reed está conectado à placa como um botão comum. Acho que não deve haver problemas com a conexão do módulo Bluetooth.
Quanto ao código em si, é muito simples. E tentei comentar sobre isso para que tudo ficasse o mais claro possível.
int gercon = 12; // conectou a chave reed a 12 pinos
distância dupla = 0; // criou uma variável dupla para armazenar a distância
configuração nula () {
Serial.begin (9600); // conectou uma conexão serial
}
loop vazio () {
/ * A seguir, o loop if. Se o interruptor reed estiver fechado, o próximo cálculo de distância será realizado. O valor 0,46472 já é o comprimento calculado de uma rotação da roda. Para evitar dados "extras", adicione um atraso de 200 milissegundos e exiba as leituras
* /
if (digitalRead (gercon) == ALTO)
{
distância = distância + 0,46472;
atraso (200);
Serial.println (distância);
}
} 
Aqui está o nosso curvímetro e pronto!
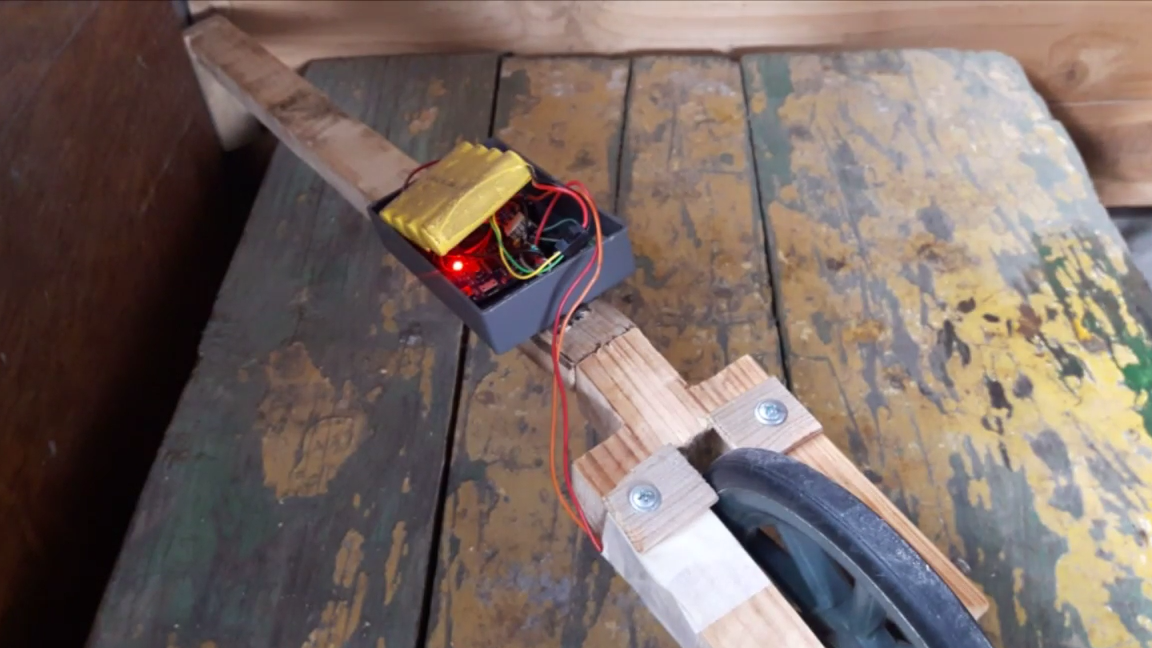
Vamos fazer algumas corridas de teste. Tudo funciona muito bem!

Você pode assistir a um vídeo na montagem deste dispositivo, talvez encontre algo interessante.
[media = https: //youtu.be/kx_7ztPsLws]
Tenha uma boa repetição do projeto!