
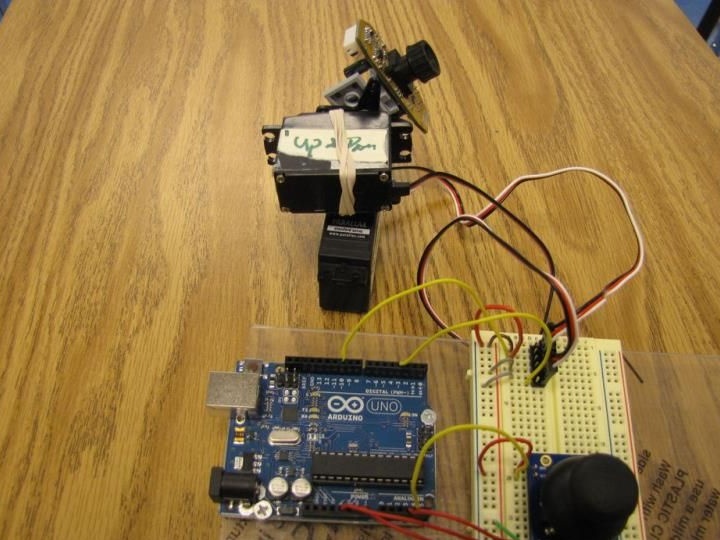
Materiais e ferramentas:
- microcontrolador Arduino (neste caseiro aplica o Arduino Uno Rev 3);
- Dois servos da Parallax;
- joystick (também da Parallax);
- placa de circuito) pequena);
- conectores para conexão;
- Um dispositivo para rastrear o movimento de servomotores (uma webcam quebrada e cubos de lego são usados).
Processo de montagem caseiro:
Primeiro passo Conectamos servomotores
O processo de montagem caseiro começa com a conexão dos servomotores. Para montar um layout preliminar, uma placa de circuito é usada. Então será possível fazer um escudo separado. Na figura você pode ver como exatamente tudo está conectado.
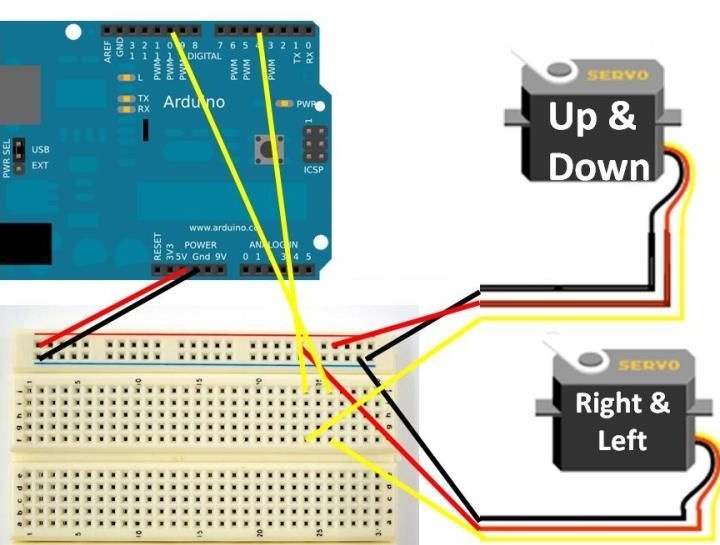
O cabo vermelho é a energia, ele se conecta ao pino de 5V no controlador Arduino.
O fio preto é um sinal de menos (terra), ele se conecta à saída do Arduino chamada GND.
O cabo amarelo do servomotor direito e esquerdo deve estar conectado ao pino 11. Em alguns modelos, ele pode ser branco.
Um cabo amarelo para cima e para baixo semelhante deve ser conectado ao pino 4. Ele também pode ser branco em alguns modelos de motor.
É importante lembrar que os conectores de sinal usados para controlar o motor são provenientes das saídas PWM.
Etapa dois Conecte o joystick
Como o joystick está conectado pode ser visto na imagem. A princípio, o esquema pode parecer bastante complicado, mas na verdade não há nada complicado aqui. Como nos motores, uma placa de fiação é usada aqui.
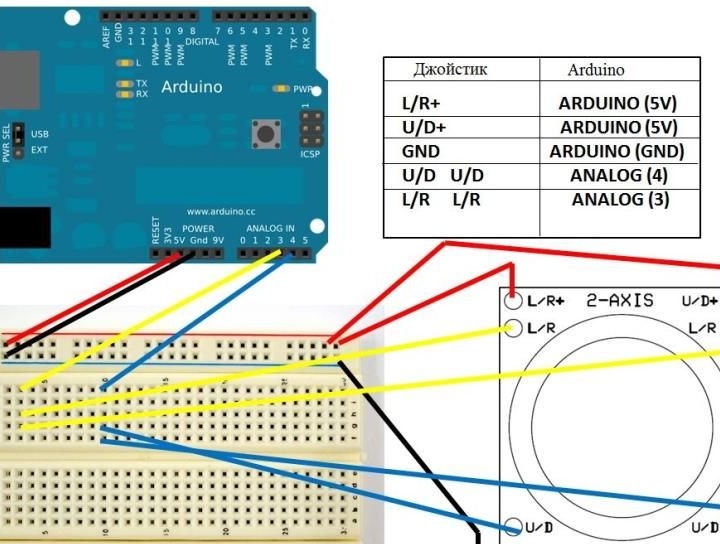
1. No módulo joystick, você pode encontrar as saídas U / R + e L / R +. Através dessas saídas, a energia está conectada. Portanto, é necessário aplicar uma tensão de + 5V do pino correspondente ao Arduino.
2. Também existem dois conectores sob o joystick chamados L / R e dois conectores U / D. Eles precisam estar conectados às saídas analógicas A3 e A4.
3. Bem, em conclusão, a terra no joystick deve estar conectada à terra no Arduino.
Após a montagem, a conexão deve ser verificada duas vezes. É devido a erros de conexão que, na maioria dos casos, surgem problemas. Isto é especialmente verdade quando uma placa de circuito é usada e há muitas conexões nela.
Etapa trêsEsboço para Arduino
O código é muito simples e contém comentários detalhados. O código acima só precisa ser copiado para o Arduino IDE. Depois que o código é carregado, os mecanismos não devem se mover. Eles devem começar a se mover apenas quando o botão do joystick for pressionado.
Problemas que podem surgir e como resolvê-los
1. Se os motores não ligarem, verifique novamente a conexão. As saídas PWM são usadas para conectar motores e as saídas analógicas são usadas para conectar joysticks.
2. Acontece que imediatamente após o carregamento do código, os motores começam a vibrar. Isso acontece se você conectar incorretamente os pinos U / D + L / R +. A conexão precisa ser verificada com cuidado. Para não queimar a placa durante o teste, ela deve ser desconectada do computador.
3. Se tudo for verificado novamente, mas os motores ainda não quiserem funcionar, tente reconectar o joystick. Ele deve ser removido da placa de circuito e, em seguida, instalado de volta com algum esforço. Os conectores do joystick devem entrar bem no layout.
Se tudo der certo, agora você pode começar a criar itens caseiros com controle através do joystick. Por exemplo, você pode criar um robô que pode ser controlado com um joystick e muito mais.