

O robô DIY será um ótimo brinquedo para crianças, também com ele você poderá brincar de parentes ou amigos. A essência do robô é a seguinte. É uma caixa com um interruptor. Assim que alguém clica em um interruptor em uma caixa, uma porta começa a abrir, da qual uma mão sai e coloca o interruptor de volta ao seu estado original. Apesar da simplicidade externa do robô, tudo isso parece bem engraçado.
A base para criar um robô é um circuito Arduino. Existem também alguns elementos mecânicos que serão discutidos abaixo. Vamos considerar em mais detalhes como pode faça você mesmo montar esse robô.
Materiais e ferramentas para fabricação:
- Placa Arduino, qualquer uma com saídas PWM serve;
- servomotores, duas peças (adequados o modelo Futaba - S3003, a potência desse motor é suficiente para abrir a porta, o dispositivo produz até 3,2 kg / cm de potência);
- pilhas;
- tipo de interruptor SPST ou SPTT;
- um interruptor para controlar a energia da bateria;
- você precisa de um botão para reiniciar o Arduino;
- fios, jumpers e outras pequenas coisas.

Além disso, você também precisará de uma caixa de velocidades (adequada para carros controlados por rádio), uma placa para um motor elétrico chamado Arduino shield do motor, um servo motor RC. Esses componentes são necessários para fazer a caixa se mover, como o autor.
Para reduzir o nível de ruído durante a operação do dispositivo, são necessários um capacitor do tipo eletrolítico com um valor nominal de 10 mF, um resistor de 10 K e um inversor 74HC04.
O processo de fabricação do robô:
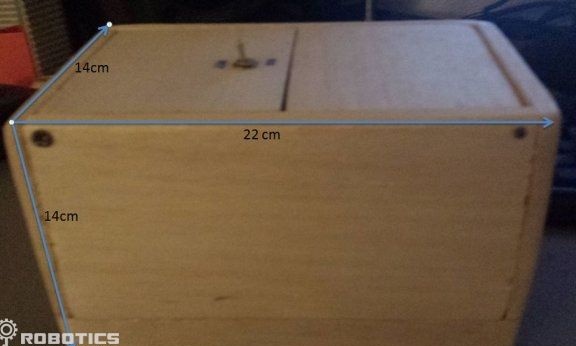
Primeiro passo Como fazer uma caixa
Para criar uma caixa, ou seja, um corpo de robô, você precisa encontrar madeira compensada ou cortiça. Além disso, você precisa de uma cola poderosa para colar madeira. É importante entender que quanto mais a estrutura pesa, mais energia será consumida. Quanto ao tamanho da caixa, é 22cm x 14cm x 14cm.
Etapa dois Diagrama esquemático e partes
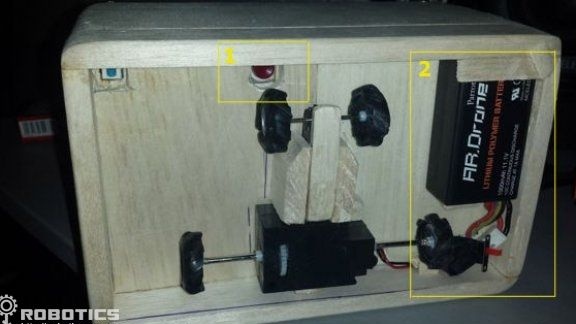
A parte superior do robô inclui uma placa principal do Arduino, dois servos e um comutador. Quanto ao circuito, responsável pela quantidade de ruído, ele pode ser substituído por um resistor comum.
Servo drives são alimentados através do quinto pino da placa Arduino. Quanto aos fios de sinal, eles estão conectados aos contatos 9 e 10. Graças a esses contatos PWM, o ângulo de rotação dos servomotores é controlado. Este é um ângulo de 0 a 180 graus.
O botão vermelho é necessário para reiniciar o Arduino.
Na parte inferior do circuito está a placa de blindagem do motor do Arduino.Na placa, você pode ver dois canais, A e B, graças a eles, se desejar, você pode conectar dois motores ao mesmo tempo. A principal tarefa desta placa é que, com ela, você pode definir programaticamente a velocidade de rotação, direção, quebras para qualquer canal dos motores. Se você observar o diagrama, o canal B é usado, enquanto o contato 13 determina a direção, o contato 11 é a velocidade e o contato 8 é usado para controlar os freios.
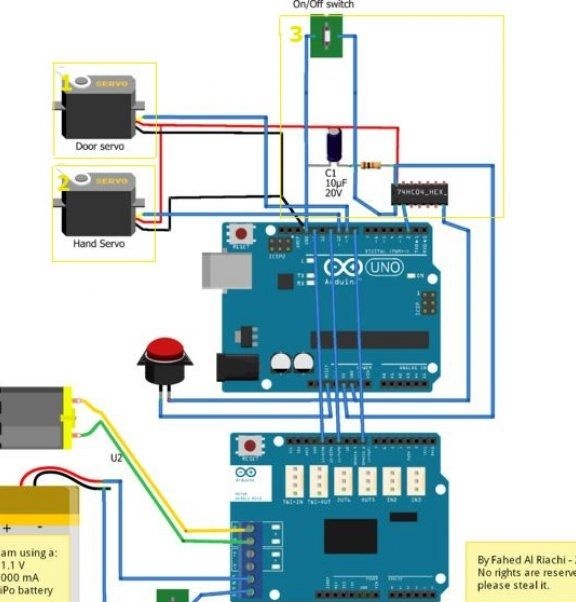
A fonte de energia é uma bateria de 11,1 / 1000 mA, conectada à placa de proteção do motor do Arduino. Se não for usado, a bateria está diretamente conectada à placa principal.
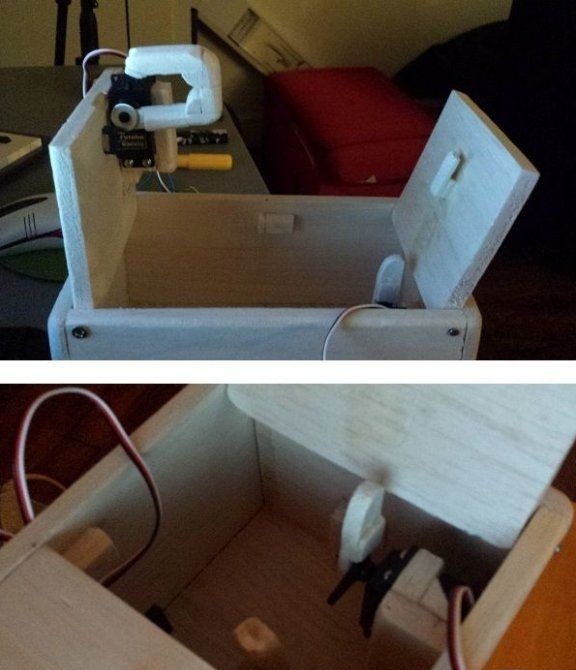
Etapa três Instalação do motor
O servoconversor e as mãos são instalados experimentalmente, é necessário verificar na prática se os mecânicos estão funcionando corretamente. Para verificar o raio de desvio dos mecanismos, você pode usar o programa IDE do Arduino.
Para o fabrico de madeira de qualquer tipo, feita a mão. O principal é que é leve, caso contrário, o consumo de energia aumentará. Quanto ao tamanho da mão, é ajustado durante a instalação, escolhendo o comprimento desejado, o efeito desejado é alcançado.
O empurrador de tampa e a mão são montados para que não toquem no servomotor durante a operação.
Etapa quatro Conectamos o servomotor e mudamos para o Arduino
Usando fios e jumpers, é necessário conectar todos os elementos eletrônicos, de acordo com o esquema especificado. Os fios devem ser colocados para que não interfiram nos elementos móveis do robô.
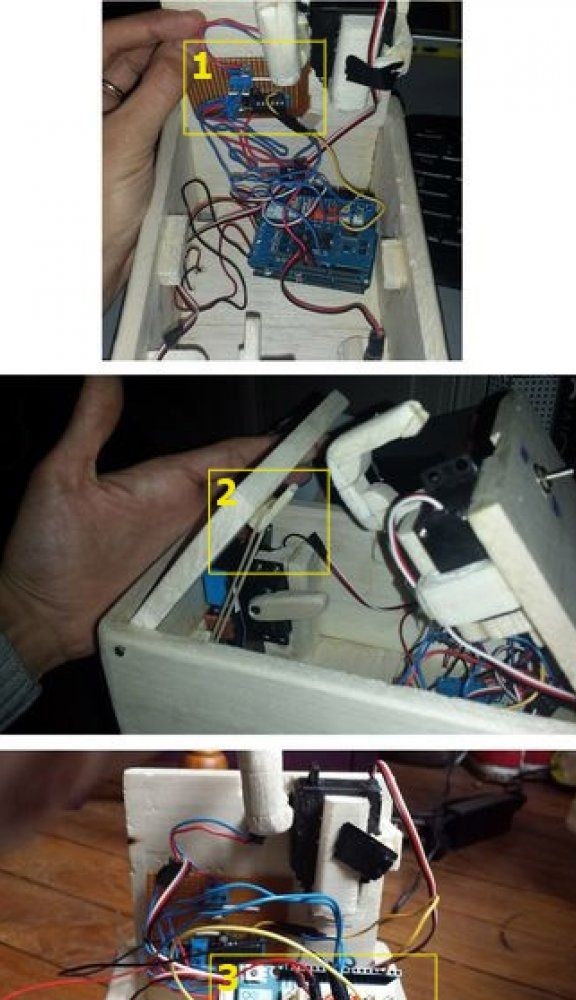
Sob o número 1, você pode ver como ele está conectado e onde o circuito de comutação está localizado. O número 2 marca um elemento como um elástico, é necessário para que a porta se abra com alguma tensão. Bem, o número 3 indica a blindagem do motor instalada no Arduino.
Quinto passo Instalação da parte mecânica para mover a caixa
Na parte inferior da caixa, há uma bateria, um motor com rodas, uma caixa de velocidades, um botão de reset e uma chave seletora para controlar a potência do robô. Antes de anexar os elementos, é necessário calcular o saldo do peso da caixa. Para que o robô seja estável, além do eixo principal, outro eixo adicional é instalado.
Etapa seis Outro recurso adicional
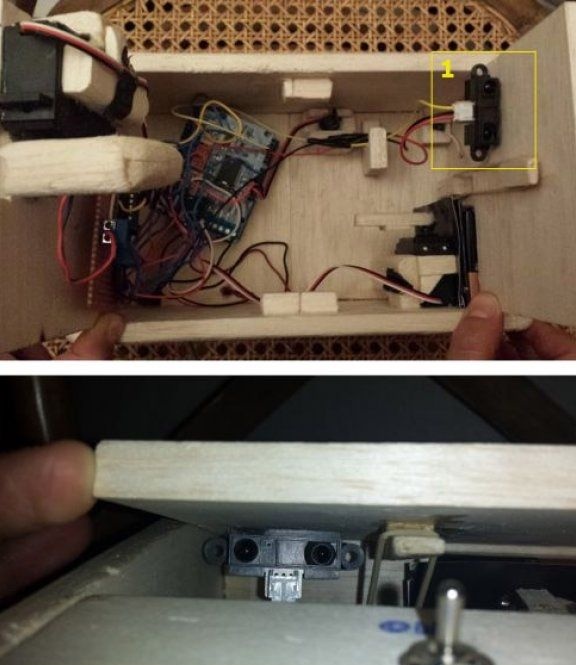
Para que o robô determine a direção do movimento, ele pode ser equipado com um sensor de infravermelho. Ao mesmo tempo, quando alguém tenta tocar no botão de alternância, a caixa se move para a direita e esquerda. Para esses fins, o sensor GP2Y0A21 é adequado, possui três fios. O amarelo deve estar conectado ao terceiro pino do Arduino, o vermelho ao pino 5 e o preto ao terra.
Isso é tudo, um robô simples e ao mesmo tempo engraçado está pronto. Esse brinquedo trará alegria não apenas para a criança, mas também surpreenderá muitos adultos.
Firmware: