
A peculiaridade de um robô é que ele é montado a partir de uma linha de medição e itens domésticos. O robô refere-se ao tipo de caminhada. Segundo o autor, com todas as ferramentas e materiais necessários, a montagem de um robô levará apenas algumas horas.
Materiais e ferramentas para montagem:
- servomotor configurado para rotação direta;
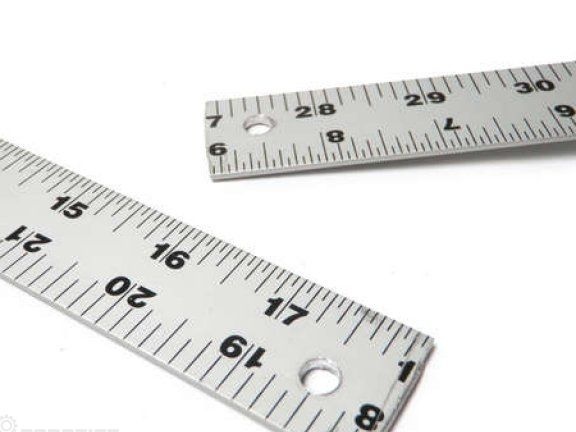
- réguas de alumínio de tamanho 2 - 18 ";
- dois pequenos recipientes para alimentos;
- dois rolos com rodas 2 "- 3" em tamanho;
- uma caneta esferográfica comum;
- uma vieira;
- dez parafusos pequenos com porcas;
- quatro arruelas pequenas;
- um contrapeso metálico 2 "- 3";
- quatro rebites;
- um tipo de chave DPDT;
- suporte de bateria AA;
- quatro pilhas AA;
- dois fios de cores diferentes (preto e vermelho);
- fita isolante.

O processo de fabricação do robô:
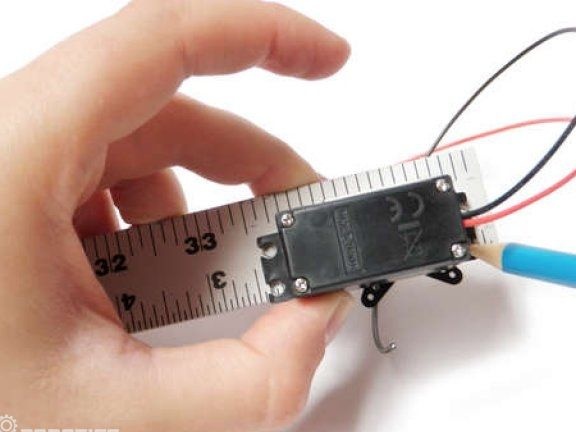
Primeiro passo Corte a régua
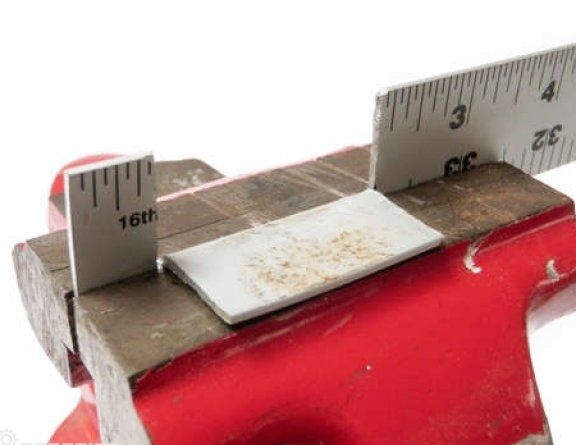
Primeiro você precisa pegar uma régua e cortá-la com uma serra de bancada. No total, dois segmentos de nove polegadas devem ser obtidos.



Etapa dois Criar marcas
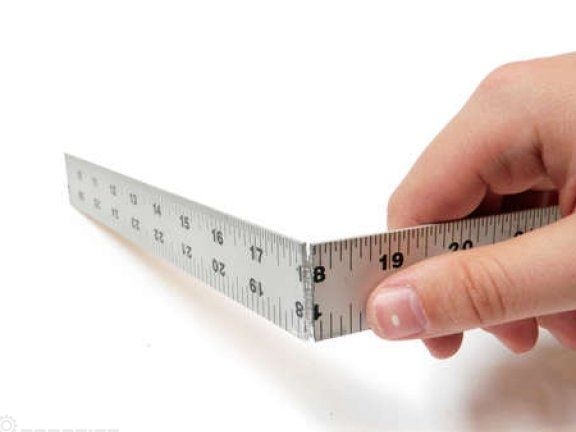
Em uma peça da régua, você precisa fazer duas incisões de 3/4. De uma borda, sua profundidade deve ser 1/2 "e da outra 2-1 / 8". Em seguida, a régua deve ser presa em um torno e, usando o martelo para dobrar a seção, essa será a base para a montagem do motor.



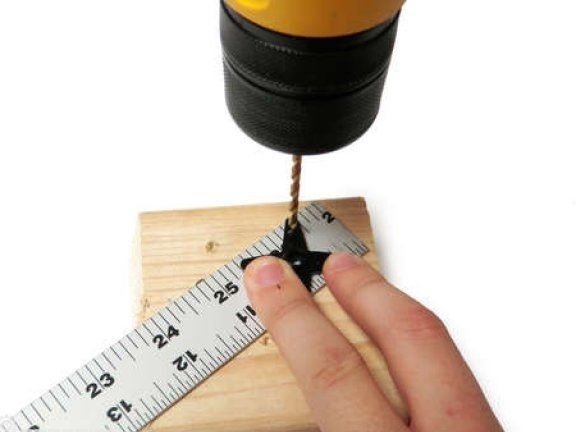
Etapa três Faça furos
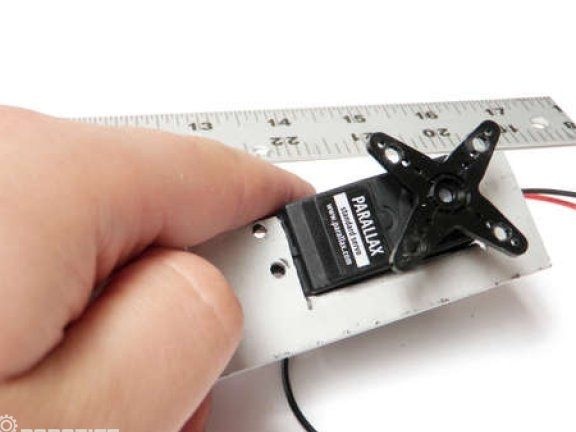
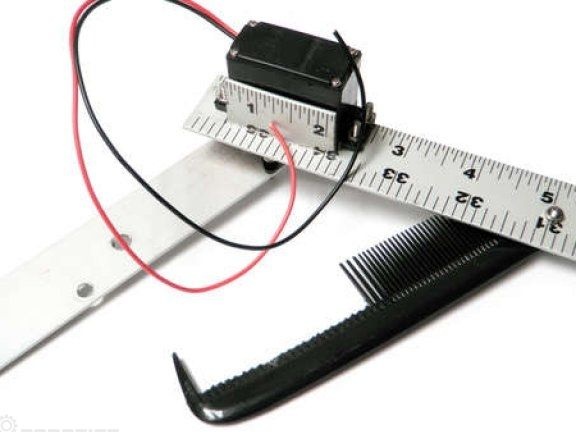
Agora você precisa pegar o servomotor e conectá-lo ao local onde será montado. Em seguida, com um lápis, você precisa fazer marcas onde posteriormente precisa fazer furos com um diâmetro de 1/8 ".



Agora você precisa fazer um furo de 1/4 ", recuando da extremidade da régua de 1/2". O furo é perfurado na extremidade oposta de onde o motor será instalado. O mesmo furo deve ser perfurado no final de outra peça da régua.


Agora você precisa fazer furos nas servo-lâminas, para isso elas precisam ser removidas. No total, é necessário fazer 4 furos, conforme indicado na foto, com um diâmetro de 1/8 ". Em seguida, as lâminas precisam ser presas à borda da régua, afastando-se da extremidade 1/2". Agora quatro furos semelhantes precisam ser feitos na régua.





E, finalmente, você precisa fazer furos de 1/8 ", recuando do suporte de motor de 5". Você também precisa fazer 3/16 furos no suporte do motor. Você também precisa perfurar outro orifício grande no qual os parafusos servo se encaixam. Isso é tudo, todos os furos para a montagem da estrutura estão prontos.
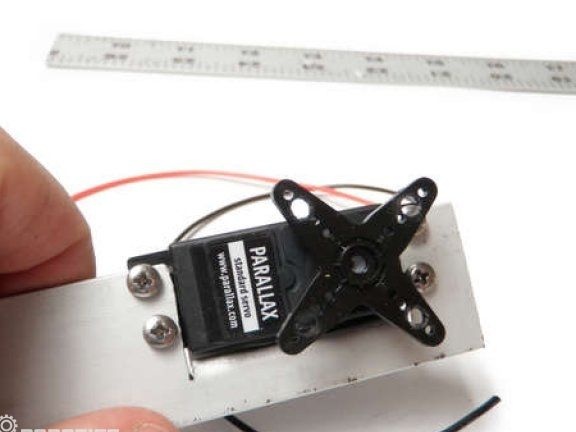
Etapa quatro Instalação do motor
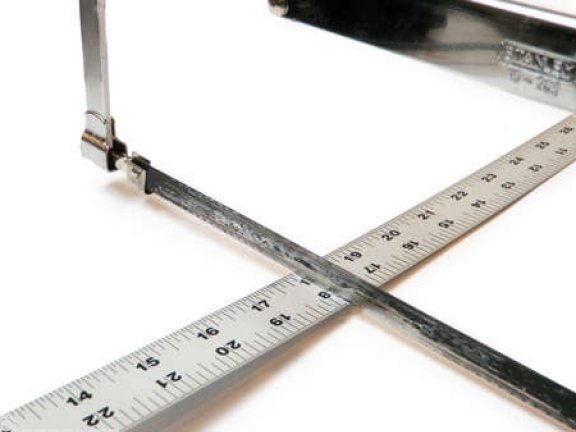
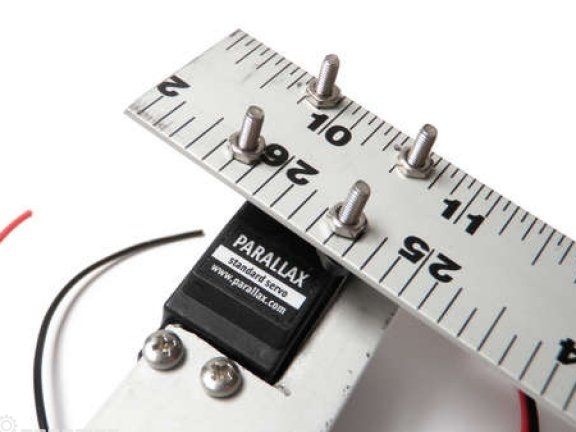
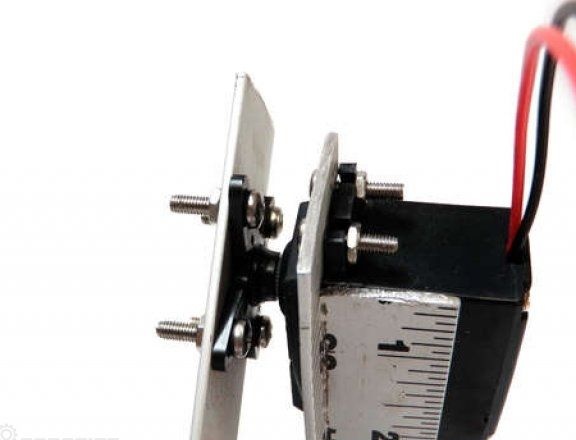
O motor deve ser montado em uma régua com porcas e parafusos.Para garantir um perfil baixo, as cabeças dos parafusos devem estar localizadas na lateral das servo-lâminas. Depois disso, a segunda metade da régua deve ser presa às lâminas do servomotor. Nesse caso, as cabeças dos parafusos devem ser giradas para dentro, para que nada interfira no movimento das réguas.

Quinto passo Preparação de vieiras
De um lado da vieira, dois centímetros de dentes devem ser removidos. A maneira mais fácil de fazer isso é com um cortador lateral. Na borda da vieira, você precisa deixar um certo número de dentes, graças a eles o pente continuará no caminho. Na borda, é necessário perfurar um furo de 1/8 ". Na fase final, o pente é cuidadosamente lixado com lixa para um estado suave.






Etapa seis Instalação de vieiras
Um parafuso deve ser inserido no orifício da vieira; depois disso, duas arruelas devem ser colocadas no parafuso, permitindo que você tire o pente das réguas a uma certa distância. Na fase final, o parafuso é instalado em uma régua e, em seguida, a vieira é fixada com uma porca.

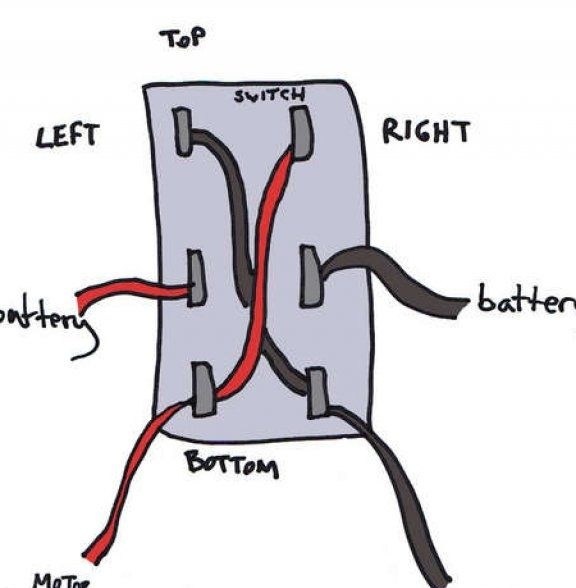
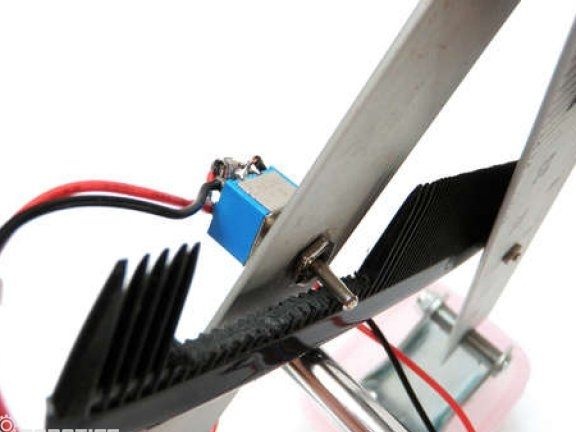
Sétimo passo. Montagem do interruptor
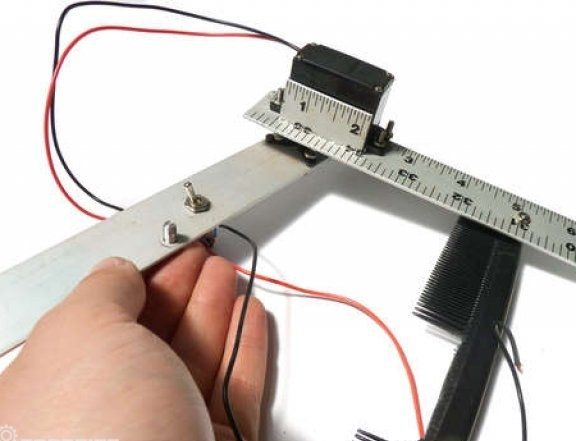
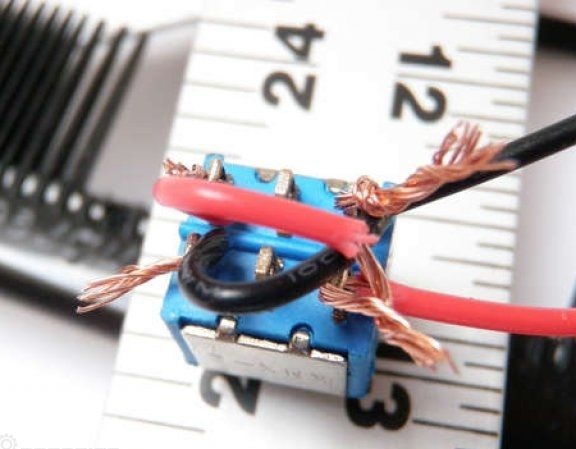
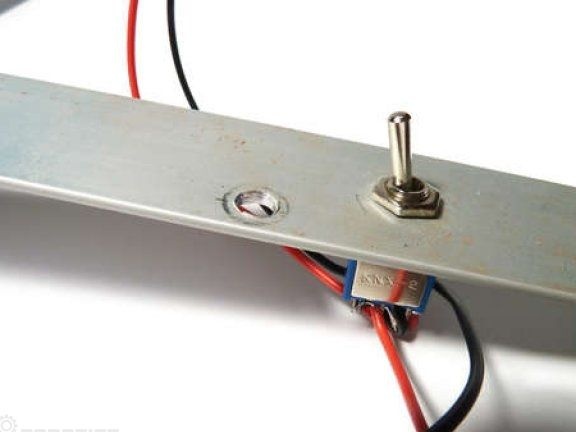
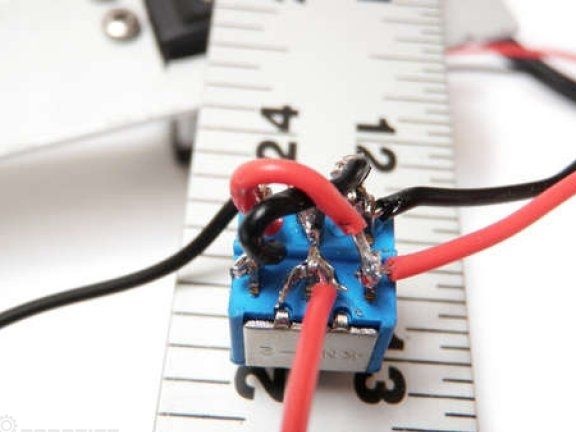
O interruptor deve ser inserido no orifício preparado e fixado com uma porca. O interruptor deve ser inserido na posição indicada nas fotografias. Agora você precisa pegar dois pedaços de arame, vermelho e preto, e soldá-los no interruptor, como mostra a figura. Então você precisa soldar dois fios longos nos contatos laterais do comutador.

Passo Oito. Instalação de contrapeso.
O contrapeso é instalado na parte da linha em que o servomotor está instalado. O pente é montado em cima do contrapeso.
Etapa nove. Corte a alça
Pegue a ampola da caneta esferográfica e, em seguida, corte a caneta em dois pedaços de 2,5 cm. Em seguida, os tubos fabricados precisam ser cortados ao meio, como resultado, quatro tubos serão lançados.


Etapa dez Extração de rodas
Agora você precisa pegar dois rolos e desmontá-los removendo as rodas. As rodas precisam ser deixadas de lado, pois podem ser usadas em outros. caseiro.



Etapa onze. Criar pontos de articulação
A carcaça do rolo deve ser colocada no centro da tampa do recipiente de plástico. Agora você precisa fazer quatro furos e prender o elemento com presilhas.

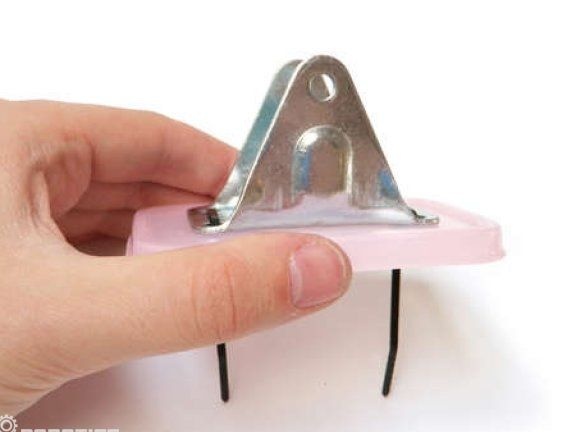

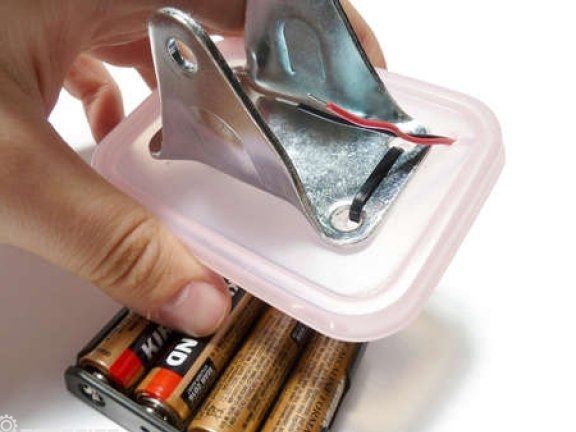


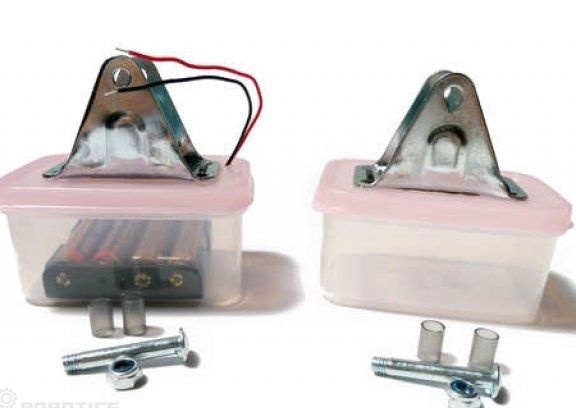

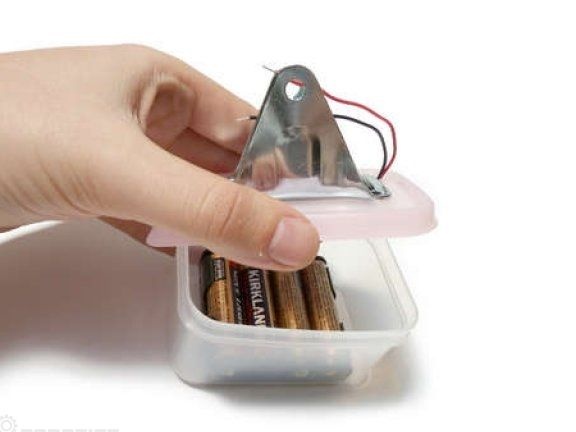

Também nesta fase, você pode instalar uma fonte de energia. Para fazer isso, em um dos recipientes você precisa fazer um furo e instalar as baterias no interior. Posteriormente, através do furo, é necessário emitir a fiação.
Etapa Doze. Montagem do robô
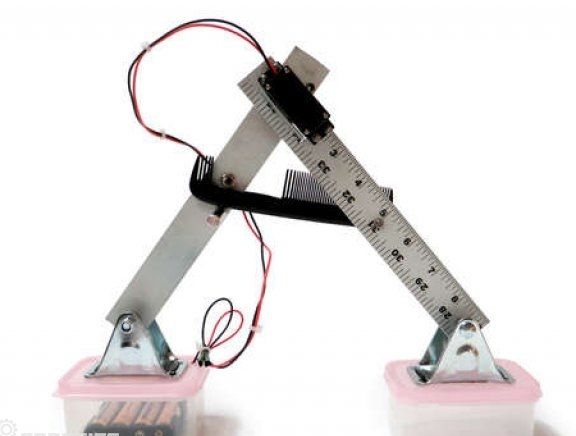
Em seguida, as extremidades de ambas as réguas devem ser presas aos suportes, conforme indicado nas fotografias. Agora resta apenas conectar os fios da fonte de alimentação e do comutador, é fácil fazer isso pelas cores dos fios.
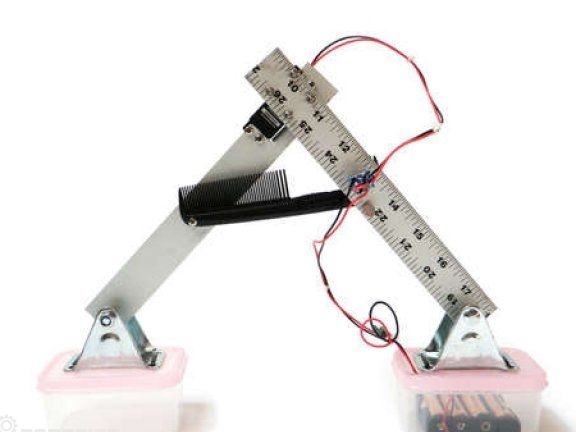
Isso é tudo, o robô está pronto. Quando o motor está funcionando, o robô começa a se mover, em algum momento, a vieira desliga a energia e as pernas do robô retornam ao seu estado original. Em seguida, o interruptor liga o circuito novamente e as pernas do robô são compactadas novamente. Então ele irá.