

Fazer esse robô com suas próprias mãos não será nada difícil e até interessante. O resultado é um dispositivo muito interessante que se comportará como uma criatura viva. Tudo isso graças a dois pequenos motores, eles são os que dirigem o robô. Alterando o ângulo de ataque dos eixos do motor, você pode tornar o robô mais rápido ou mais lento. Você também pode experimentar várias dicas que podem ser usadas no eixo do motor.
Materiais e ferramentas:
- dois pequenos motores (3 Volts, podem ser encontrados em brinquedos infantis);
- suporte para baterias (você pode fazer isso sozinho ou retirá-lo do controle remoto antigo, lanterna etc.);
- dois comutadores do tipo SPDT (podem ser obtidos em um mouse de computador antigo);
- dois clipes de papel pequenos e um grande;
- uma pequena roda do brinquedo;
- cablagem fina

Processo de fabricação:
Primeiro passo Fiação de solda
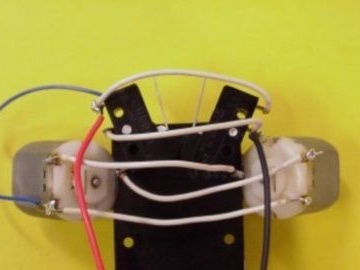
Primeiro, você precisa preparar os fios e soldá-los a todos os componentes eletrônicos, para que mais tarde seja conveniente conectar os nós. Os fios devem ser cortados com um comprimento de 6 cm e removidos de suas extremidades em cerca de 1 cm. Agora você precisa soldar dois fios nos motores e nos interruptores. Além disso, não se esqueça de soldar os dois fios nos contatos do suporte da bateria. Outras extremidades dos fios são preferencialmente estanhadas.

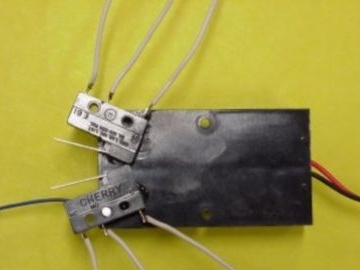
Etapa dois Definir interruptores
Para ajustar os interruptores, o suporte da bateria deve estar virado ao contrário. Agora você precisa colar os interruptores com cola no suporte da bateria. Como resultado, a letra V deve se formar.
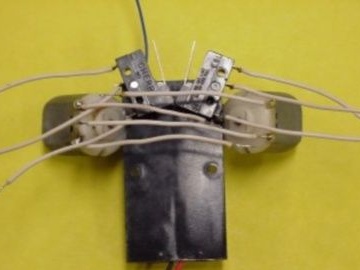
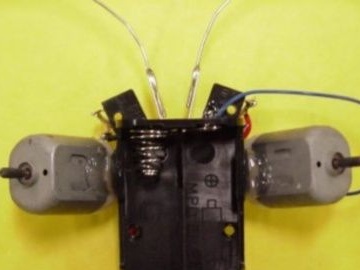
Etapa três Instalação do motor
Os motores devem ser conectados ao suporte da bateria em ângulo, conforme indicado na figura. Os ângulos dos dois lados devem ser os mesmos, caso contrário o robô não funcionará corretamente. Os veios do motor devem estar encostados na estrada. Os motores podem ser montados com cola.

Etapa quatro Instalação da roda estabilizadora
O estabilizador é necessário para caseiro ficou parado na estrada. Para fazer uma roda, você pode usar um rolo de um gravador ou uma roda de um brinquedo infantil. Quanto ao “plugue”, é feito de um longo clipe de papel ou barbante.Em conclusão, o estabilizador adere uniformemente ao suporte da bateria.

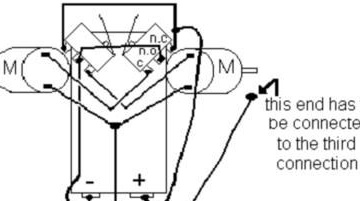
Quinto passo Conexão de fiação
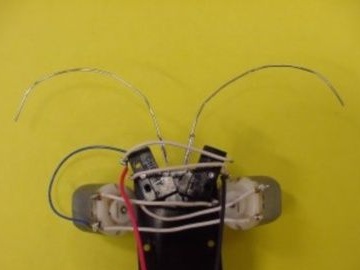
Para que o robô funcione corretamente, todos os fios devem ser conectados claramente de acordo com o esquema. O circuito pode ser visto na figura.

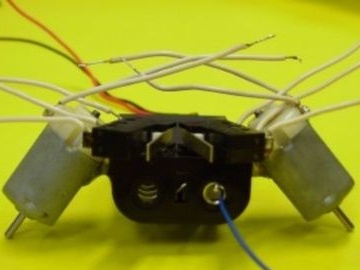
Etapa seis Fazendo um bigode para o bug
O bigode servirá de roda para o besouro. Assim que um obstáculo se aproxima, o bigode liga os interruptores e os motores giram o robô na outra direção. Quando o interruptor é ativado, um dos motores é desligado e um tipo de diferencial é acionado. Se os dois interruptores estiverem ativados, o robô para completamente. O bigode é feito de pequenos clipes de papel, eles devem ser cuidadosamente colados aos botões dos interruptores.

Sétimo passo. Revisão final e teste do robô
Na fase final, as pontas de borracha devem ser instaladas nos eixos do motor, elas são necessárias para uma melhor aderência. Eles podem ser feitos de cambraia.
Isso é tudo, o robô está pronto. Você precisa executá-lo em uma superfície lisa, por exemplo, em uma mesa ou linóleo. Como as patas do besouro são muito pequenas, ele não rasteja ao longo do tapete, para isso será necessário aumentar as pontas dos veios do motor.
No futuro, o robô poderá ser atualizado a seu critério. Por exemplo, ele pode criar olhos de LED que acenderão quando em contato com um obstáculo.