O mestre há muito tempo se interessa por modelos de aeronaves. Primeiro, foi um modelo de aeronave, depois quadrocopters. Neste artigo, o assistente lhe dirá quais materiais escolher para um quadrocopter, além de como fazer uma moldura de madeira compensada. Vamos assistir a um breve vídeo de demonstração.
Para fazer um quadrocóptero, o mestre usou o seguinte
Ferramentas e materiais:
Contraplacado de bétula;
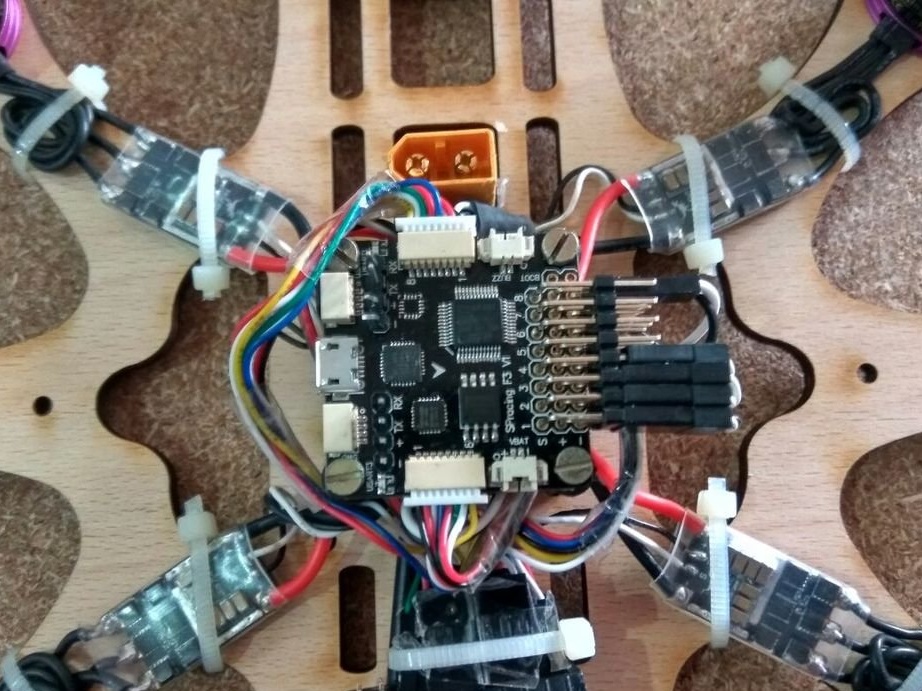
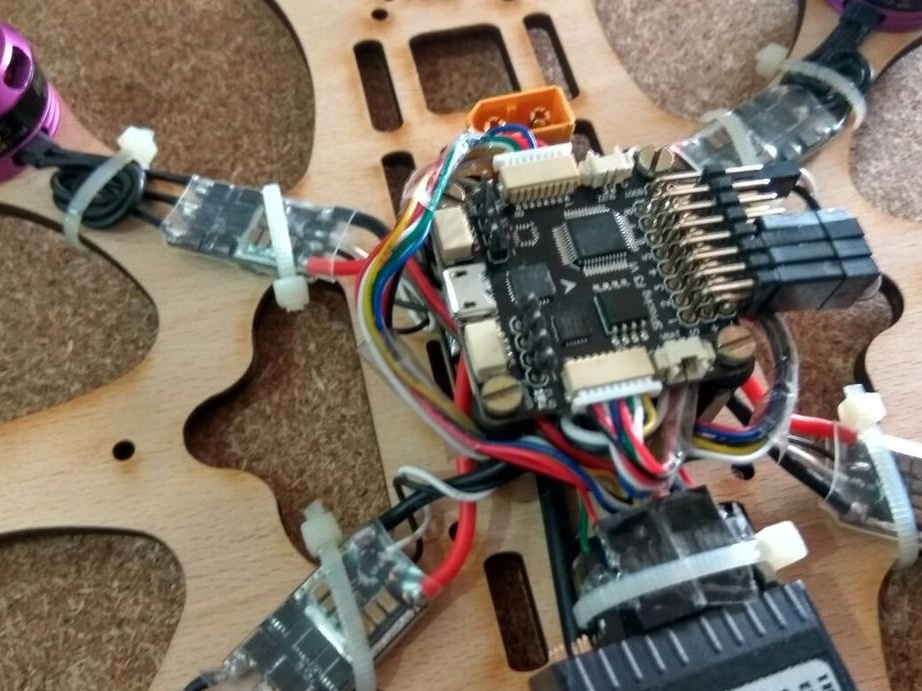
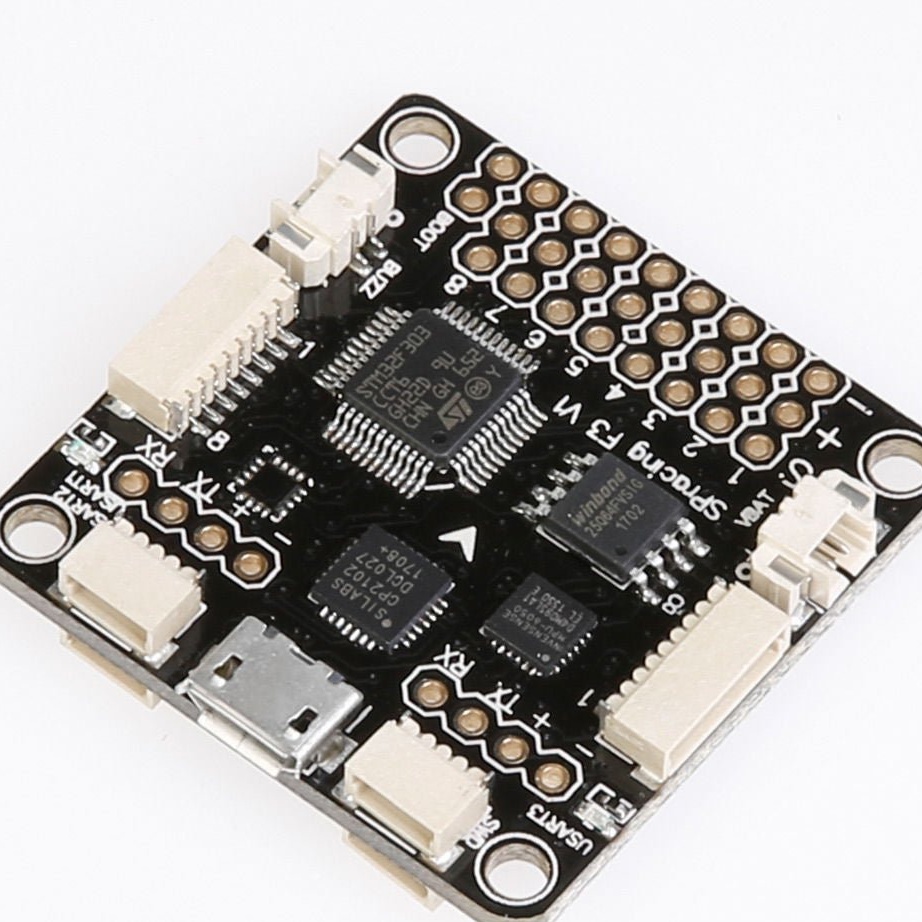
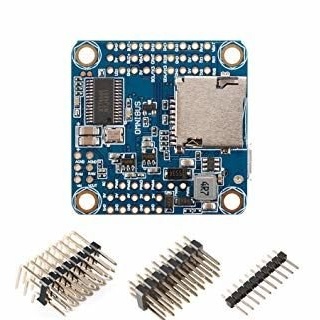
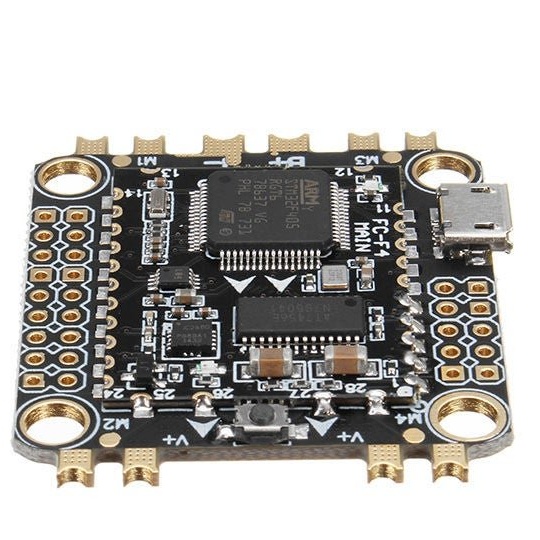
- Controlador de ônibus F4, SP Racing F3;
- Quadro de distribuição de energia Mateck;
- Controlador HGLRC 28A BLHeli ESC - 4 peças;
- Motor Racestar BR2204 2600Kv Racing Edition -4 peças;
- Hélices KingKong 5X4X3 - 4 peças;
- módulo de rádio Flsky TH9X com receptor;
Gens da bateria 3800 mAh;
-Racks; - 16 peças;
-Parafusos M3;
- chave de fenda;
Acessórios de solda;
-Faca;
- cortador CNC;
Etapa 1: Seleção de material
Quadro.
Normalmente, a estrutura é feita de componentes leves e rígidos, como fibra de vidro, fibra de carbono, madeira, alumínio, etc. Existem muitos tipos diferentes de estruturas, o mestre fará uma estrutura para quatro motores.
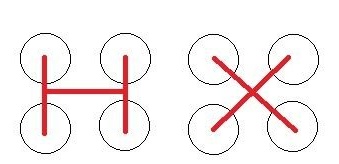
Esses quadros estão principalmente na forma H ou na forma X. O formato X é um bom equilíbrio entre estabilidade e manobrabilidade. É esse quadro que o mestre fará.

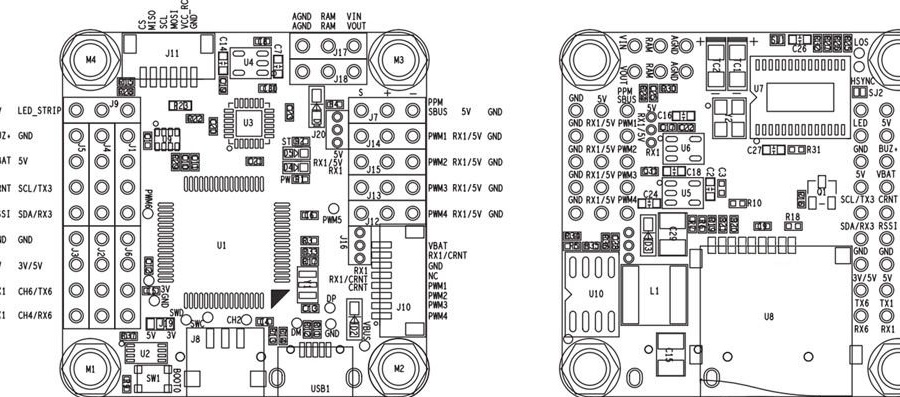
Controlador
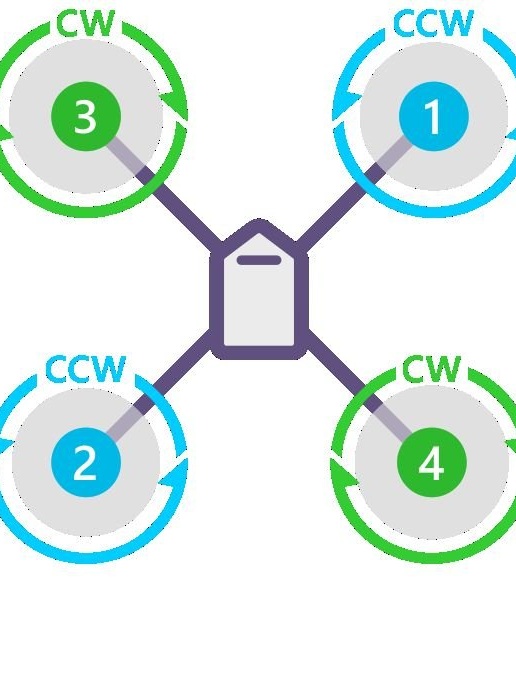
O controlador controla a operação dos motores. O diagrama mostra que todos os motores giram em direções opostas para neutralizar o torque gerado por cada motor. O controlador é o cérebro de um quadrocóptero, é basicamente um pequeno computador que usa seus sensores para medir constantemente ângulo e velocidade.
Os controladores de vôo são classificados principalmente de acordo com as especificações do processador.

Motores
Existem dois tipos de motores, motores sem escova e motores sem escova. A maioria dos quadrocópteros usa motores sem escova que podem responder muito rapidamente a mudanças nos requisitos de velocidade e torque. Para motores sem escova, especial eletrônico controlador de velocidade (ESC).
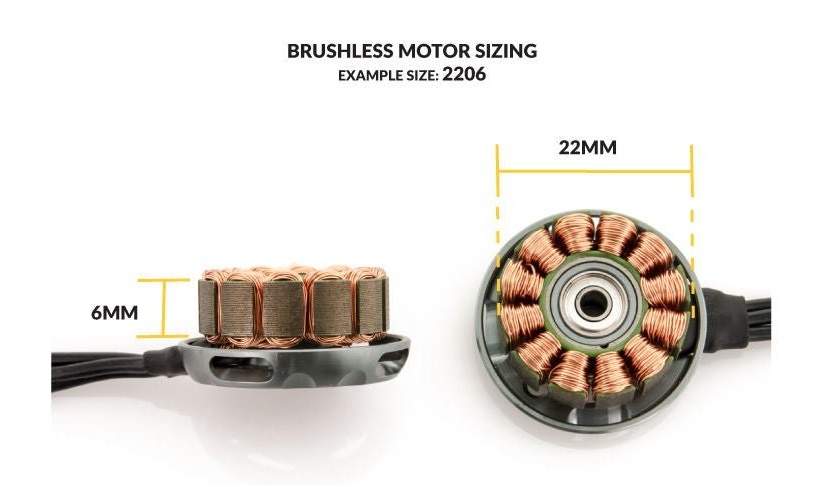
O tamanho dos motores sem escova é indicado por um número de 4 dígitos - AABB. "AA" é a largura do estator e "BB" é a altura ou o diâmetro do estator, ambos em mm (milímetros). Por exemplo, o Racestar BR2205 possui um estator com um diâmetro de cerca de 22 mm e uma altura de cerca de 05 mm.
De fato, quanto maior o estator, maior a potência em velocidades mais altas e quanto maior o estator, maior o torque em velocidades mais baixas.
O valor KV do motor indica a velocidade na qual o motor irá girar quando você aplicar 1 volt aos enrolamentos.É determinado pelo número de enrolamentos do fio de cobre no estator do motor e pela força magnética dos ímãs.
Menos enrolamentos significam menos resistência e, portanto, maior rotação. É por isso que motores com KV mais alto tendem a ter menos enrolamento do estator.
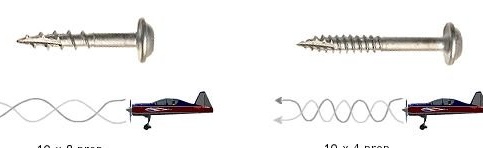
KV determina qual parafuso você pode usar com o motor. Quanto menor o KV, maior o parafuso que ele pode girar e vice-versa. Não é possível aumentar a força de elevação instalando um parafuso maior em um motor com um KV mais alto, pois os requisitos de torque vão além da potência permitida e o motor superaquece.
Por exemplo: os motores BR2205 de 2600 kV podem trabalhar com parafusos de 5x4 polegadas e os motores BR2212 de 1000 kV podem trabalhar com parafusos de 10x4,5 polegadas
KV não é de forma alguma um indicador da potência do motor; os motores com um KV mais alto não são necessariamente mais poderosos que os motores com um KV mais baixo.


Controladores eletrônicos de velocidade (ESC).
Os recentes avanços nos mini quadrocopters foram possíveis graças ao surgimento de pequenos controladores eletrônicos de velocidade, que permitem o funcionamento de motores sem escova. A operação dos controladores eletrônicos de velocidade é receber o sinal do acelerador do controlador de vôo e manter a rotação do motor na velocidade necessária.
Várias tecnologias funcionam dentro desses pequenos dispositivos que estão além do escopo deste manual. Ao comprar, escolha um ESC com uma corrente direta nominal de pelo menos 20% mais que a calculada.


Hélices.
As hélices convertem a energia mecânica dos motores em tração. O tamanho e a forma da hélice desempenham um papel enorme na eficiência de vôo.
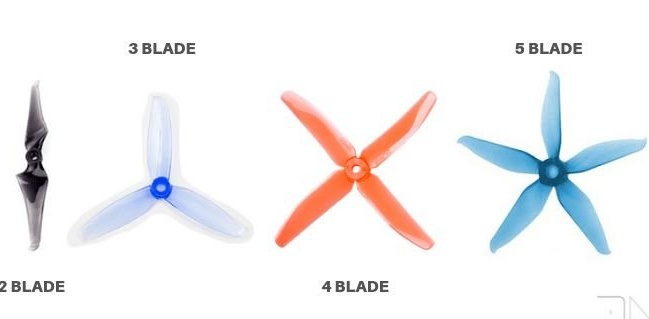
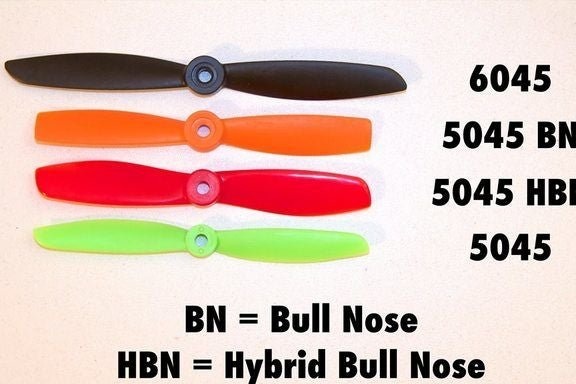
Existem 2 tipos de formatos usados pelos fabricantes: L x P x B | LLPP x B. Onde, L é o comprimento, P é o passo, B é o número de lâminas.
As hélices podem ser feitas de vários materiais, como composto de plástico, fibra de carbono, madeira, etc. Cada tipo de material tem características únicas, por exemplo, fibra de carbono e madeira são realmente rígidas e conhecidas por seu bom funcionamento, e alguns plásticos são extremamente duráveis. A maioria dos parafusos usados nos mini quadrocopters são feitos de compósitos plásticos.
O tamanho da hélice que você pode usar é limitado pelo tamanho do seu quadro, bem como pela potência HF do seu motor. Como regra, quanto mais hélice você puder usar para criar um certo impulso, mais eficaz será. Para mini quadrocopters, eles variam entre os parafusos de 5 a 6 polegadas em incrementos de 4-5 polegadas.
O número de pás afeta a tração e o consumo de energia. Quanto mais lâminas, mais tração e mais energia é desperdiçada.

Baterias
Atualmente, a maioria dos drones usa baterias de polímero de lítio, comumente conhecidas como baterias Lipo. A bateria, juntamente com o ESC e o motor, é um sistema de energia quadrocopter.
Não pense na bateria como um reservatório de energia, os motores podem puxar uma quantidade monstruosa de amperes em intervalos muito curtos. As baterias LiPo são um conjunto de células, cada uma com uma tensão nominal de 3,7 V. Se for necessária uma tensão mais alta, essas células podem ser conectadas em série para formar uma bateria. As baterias conectadas em série são marcadas com a letra "S" e em paralelo com a letra "P".
Quanto mais células conectadas em série, maior a tensão e mais células em paralelo, maior a capacitância.
Por exemplo:
1S = 1 célula = 3,7 V
2S = 2 células = 7,4 V
3S = 3 células = 11,1 V
4S = 4 células = 14,8 V
5S = 5 células = 18,5 V
6S = 6 células = 22,2 V
A capacidade é indicada em miliamperes ou "mAh". Esse é o número de amperes que uma bateria pode fornecer em uma hora. Por exemplo, uma bateria 3S 2000 mAh pode fornecer 2 A por 1 hora. portanto, se seu quadcopter puxar 20A, seu vôo continuará por 2/20 * 60min = 6 minutos.
Descarga nominal indica a velocidade máxima em que você pode extrair corrente da bateria. É indicado pelo número "C" na parte superior. Quanto maior a classificação C, maior a quantidade de corrente que a bateria pode fornecer.
Por exemplo, uma bateria de 2000 mAh 25C pode fornecer até 2000x25 = 50.000 mA ou 50 A.



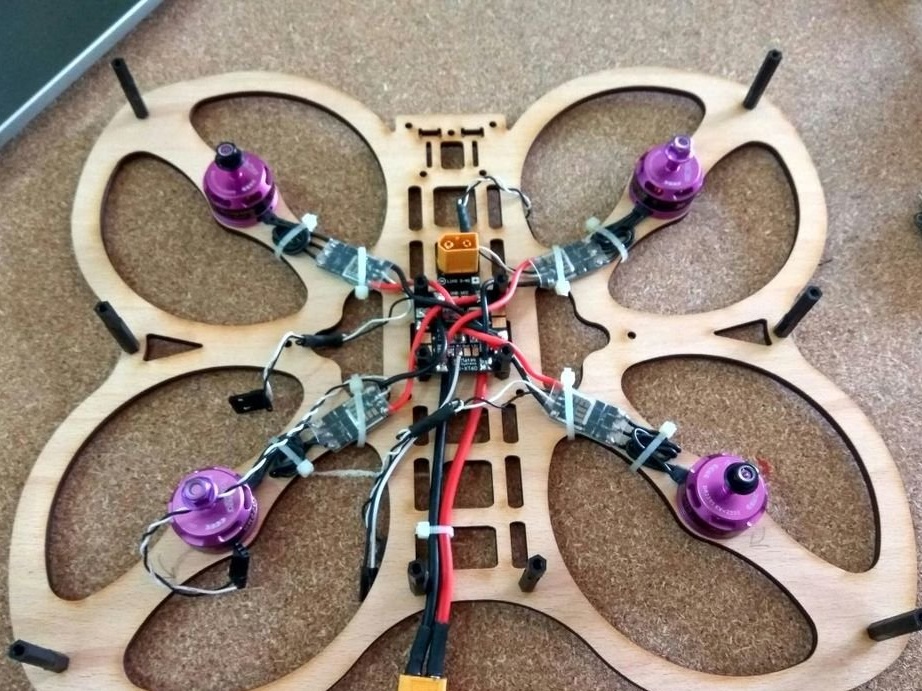
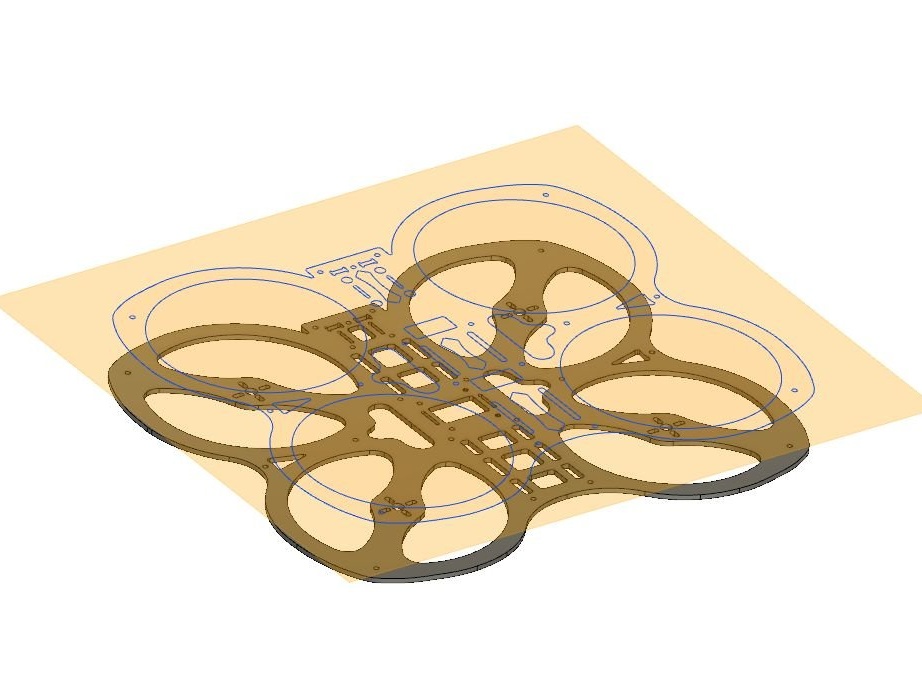
Etapa 2: projeto e montagem do quadro
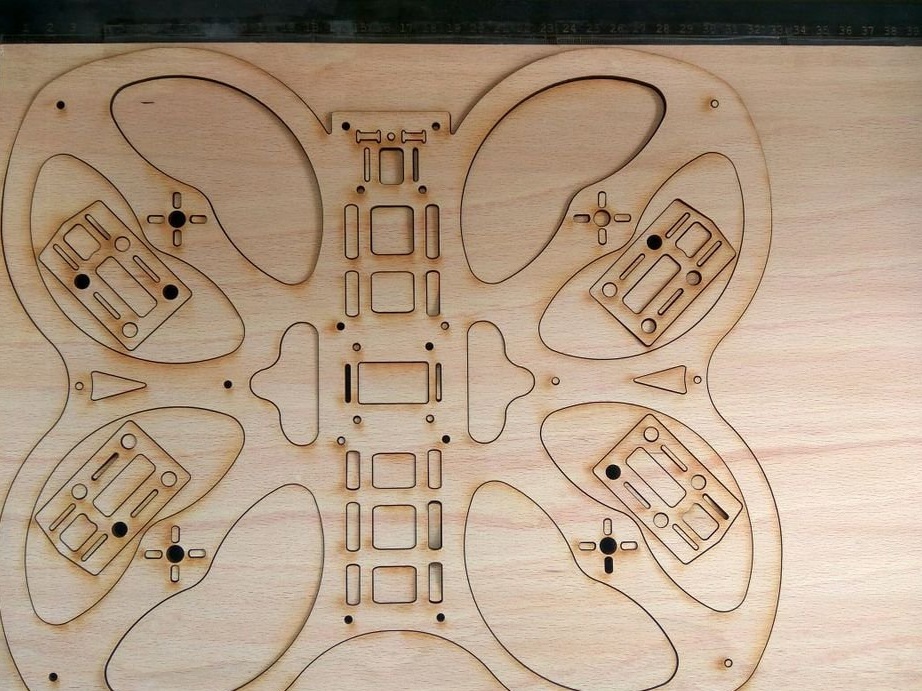
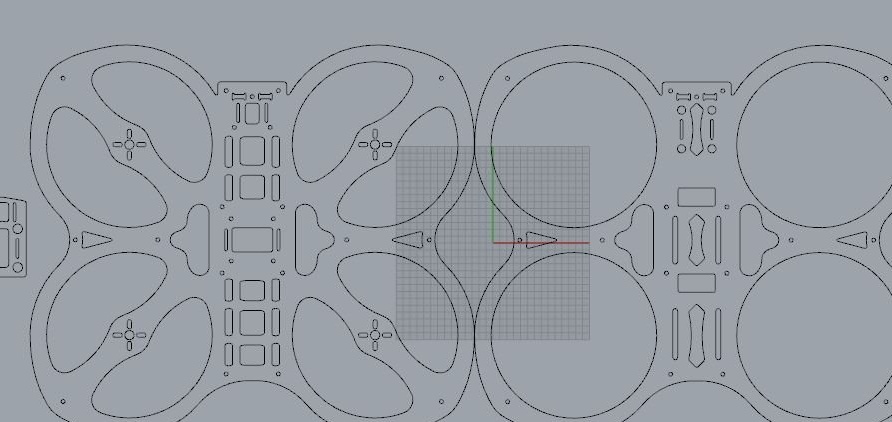
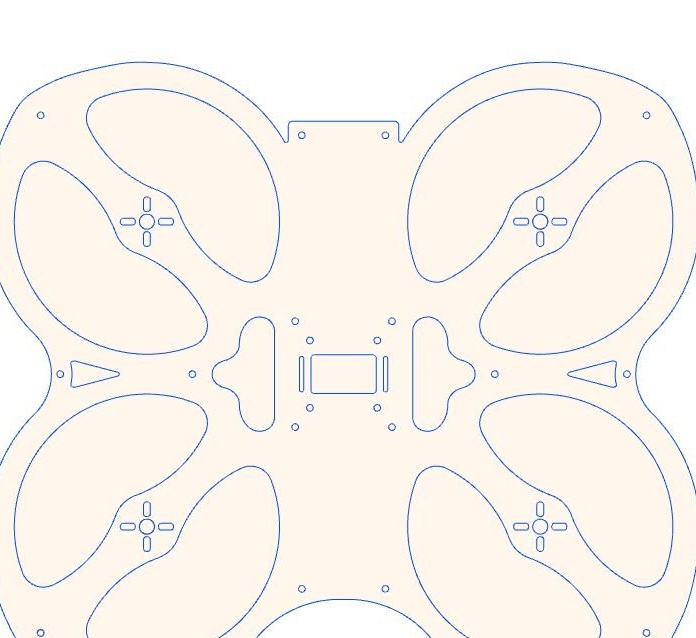
O design da moldura foi inspirado na forma de borboleta monarca.Quando você olha para o quadro de cima, parece duas asas.
O assistente desenhou o design no Fusion 360 e Rhino CAD. O tamanho do chassi é de cerca de 230 mm, devido à distância diagonal de um cubo do motor para outro. Os tamanhos de chassi mais populares são 210 mm, 250 mm, etc. Depois de definir o tamanho do chassi, desenhe os suportes do motor.
O edifício central é o local onde todos os componentes eletrônicos serão instalados, incluindo o controlador de vôo, o receptor, a bateria, etc. No ponto médio, existem 4 orifícios M3 a uma distância de 30,5 mm um do outro.
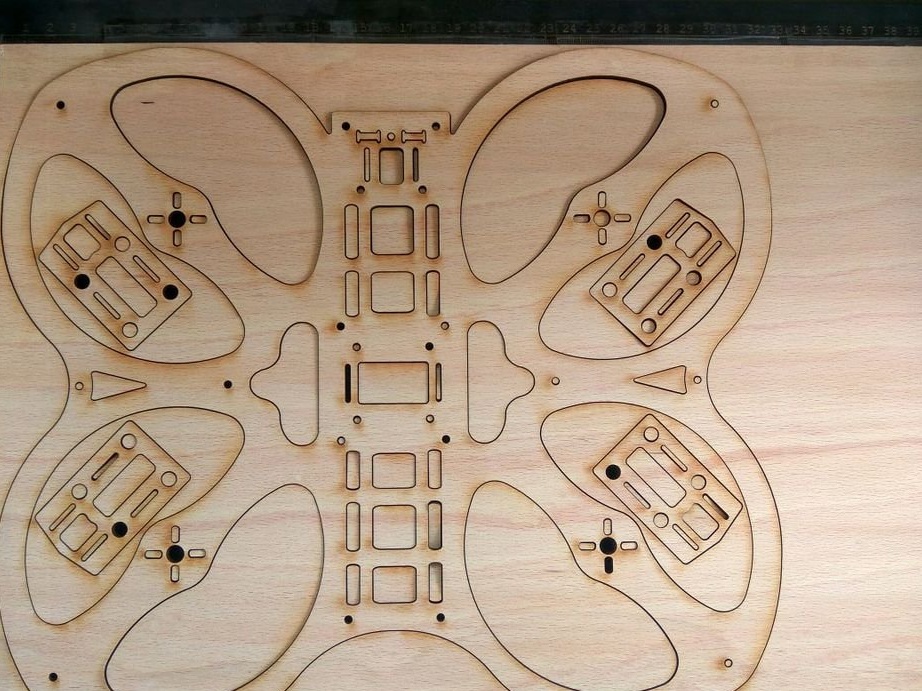
O item é feito com corte a laser. Se você não tem um cortador, pode cortar na oficina. O arquivo para corte pode ser baixado abaixo.
Arquivo Design.rar









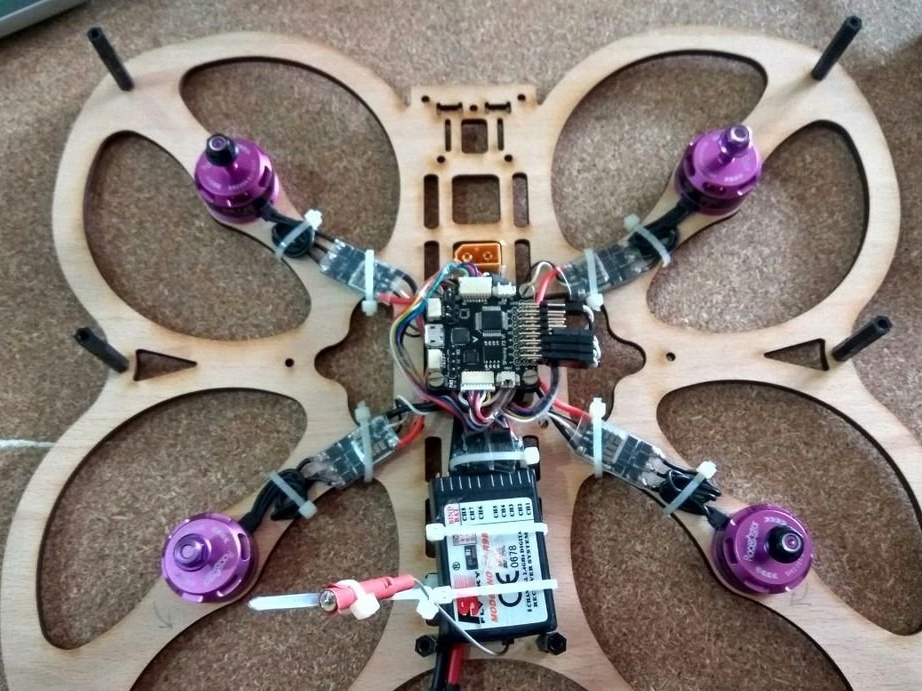
Etapa três: criar
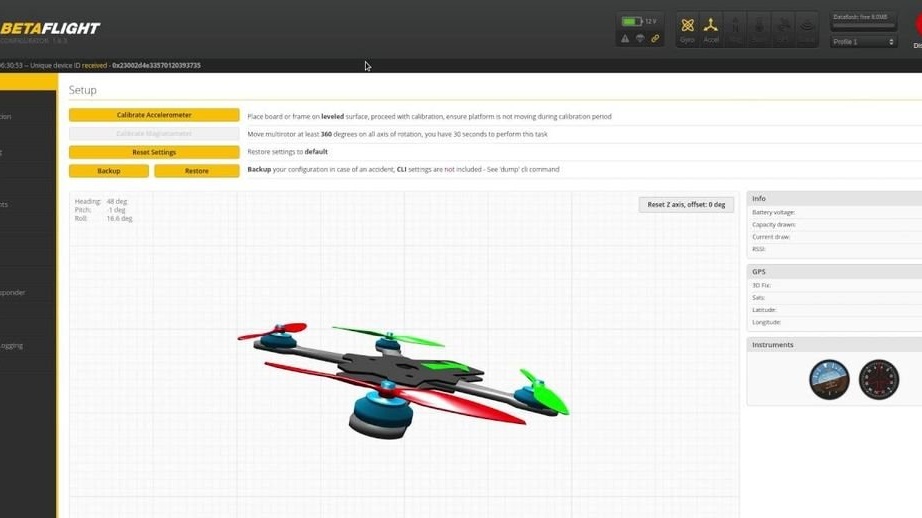
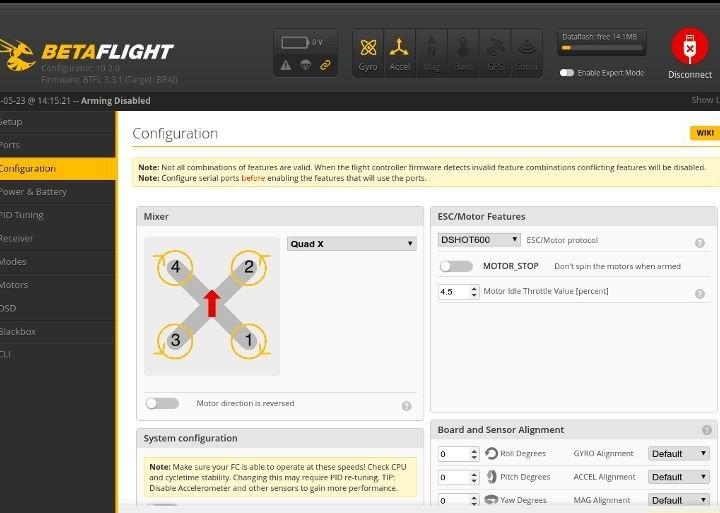
Agora você precisa montar um quadrocopter.
Primeiro, você precisa atualizar o controlador com o firmware Betaflight. Em seguida, calibre o sensor. Conecte o módulo de rádio e verifique seu funcionamento. Monte os motores no chassi de acordo com o diagrama do chassi em X com a direção correta de rotação. Solde os fios do motor aos terminais ESC e prenda o ESC ao suporte. Conecte o quadro de distribuição de energia e solde os coxins ESC. Conecte o Soler XT60 ao cabo de alimentação e depois ao quadro de distribuição de energia. Corrija o controlador. Conecte os fios do ESC ao controlador de vôo. Monte o receptor na armação. Coloque a tampa superior.