


Neste artigo, o Assistente nos mostrará como ele fez o helicóptero Lego 60193 Arctic Air Transport em ação o modelo quadrocopter. A principal tarefa na fabricação do quadrocóptero, além das qualidades de vôo, era economizar o máximo possível de peças originais.
Vamos ver um pequeno vídeo demonstrando a operação do quadrocopter.
Assim, para a fabricação de tal quadrocopter, o mestre usou o seguinte
Ferramentas e materiais:
Helicóptero do ártico da cidade do LEGO - 60193:
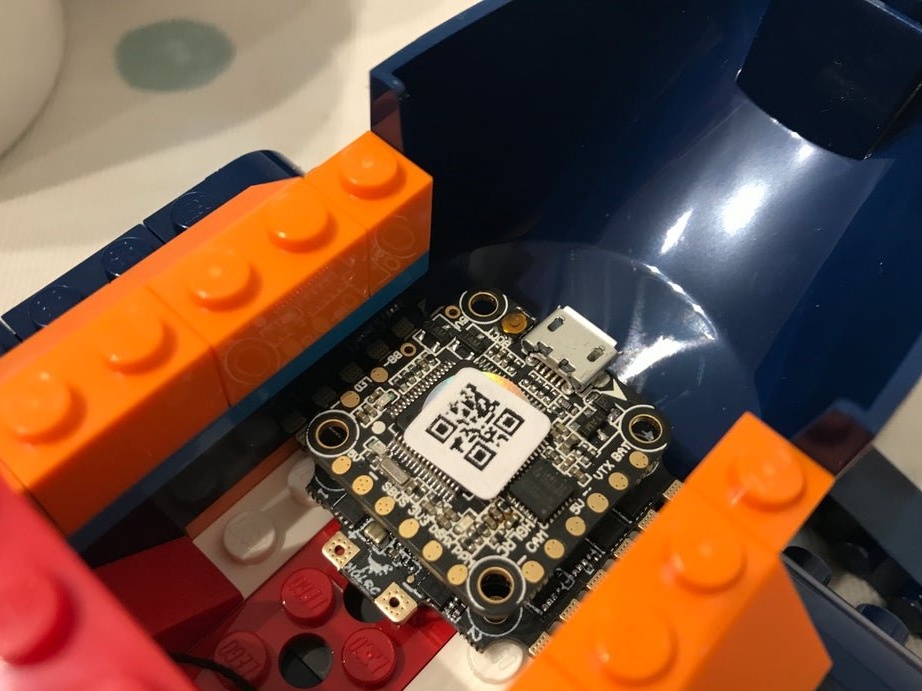
- Controlador e ESC 20x20 mm, por exemplo, HGLRC XJB F428 Micro F4 AIO OSD;
- Motores sem escova - 4 peças;
Hélices
Bateria 950 mAh;
-Conectores;
Fio;
-Módulo de rádio (transmissor e receptor);
-Fixadores;
-Faca;
Ferro de solda;
-Pistola de cola;
- chave de fenda;
-Broca;
Etapa 1: Construção de Lego
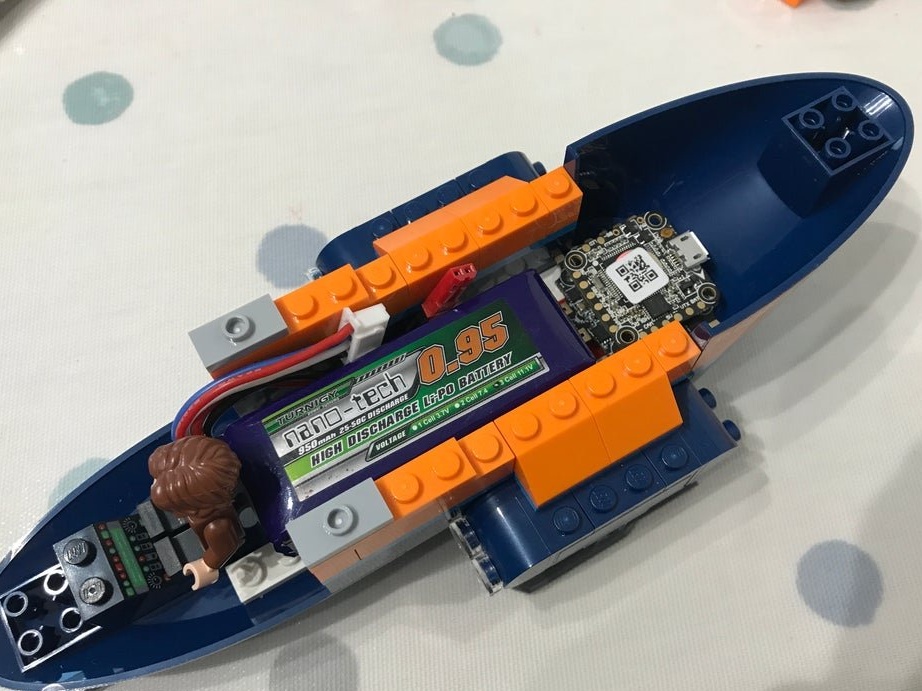
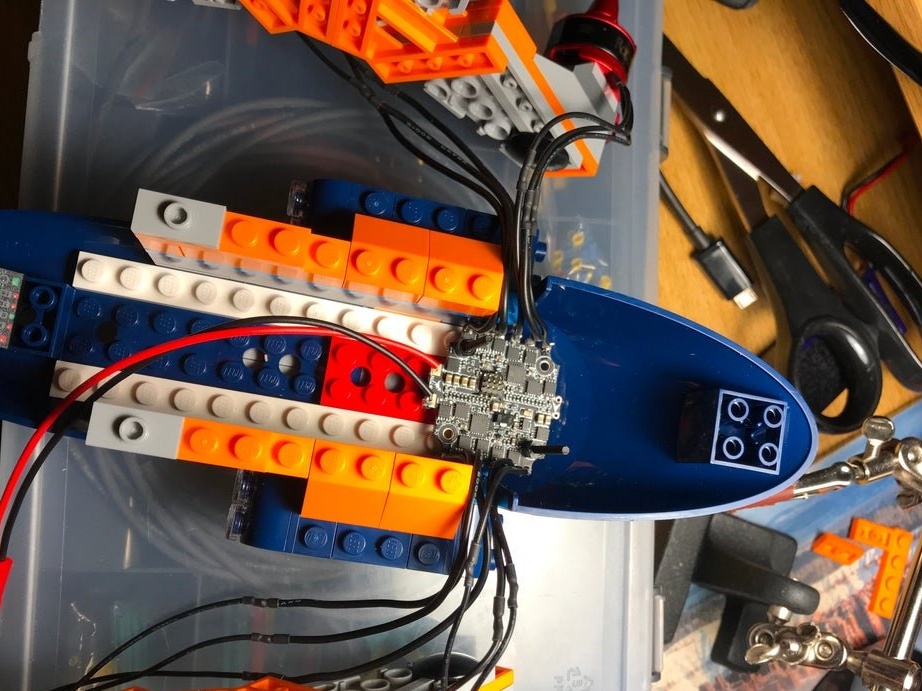
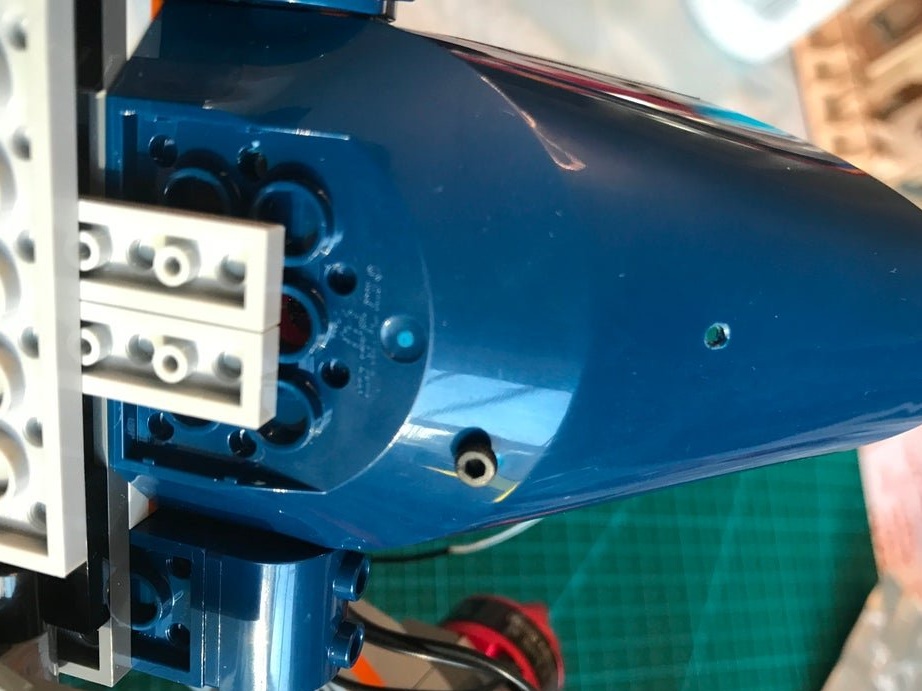
Primeiro, o mestre coleta o LEGO-Ártico. Em seguida, o modelo é parcialmente desmontado. No interior, é necessário colocar a bateria e o controlador, observando o balanceamento do modelo.


Etapa 2: Montagem do motor
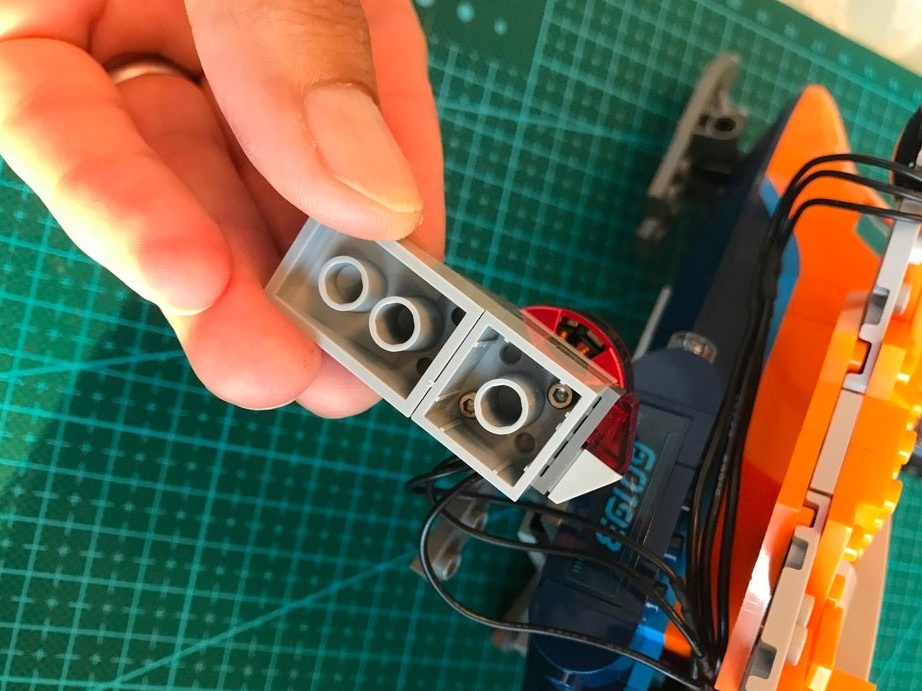
Os furos de montagem do motor sem escova padrão 1806 são praticamente os mesmos dos prisioneiros da placa LEGO 2x2 padrão. Cada montagem de “motor” em um quadrocóptero possui um ladrilho 2x2 cinza escuro (LEGO 3022) e um ladrilho 2x2 cinza claro com um pino vertical (LEGO 2460), que geralmente é mantido nos cubos de uma hélice LEGO na parte superior.
O mestre faz os orifícios de montagem. Nos motores, no centro há uma maré baixa. Um buraco embaixo é perfurado no centro do ladrilho. Protege os motores.








Etapa três: Ombros
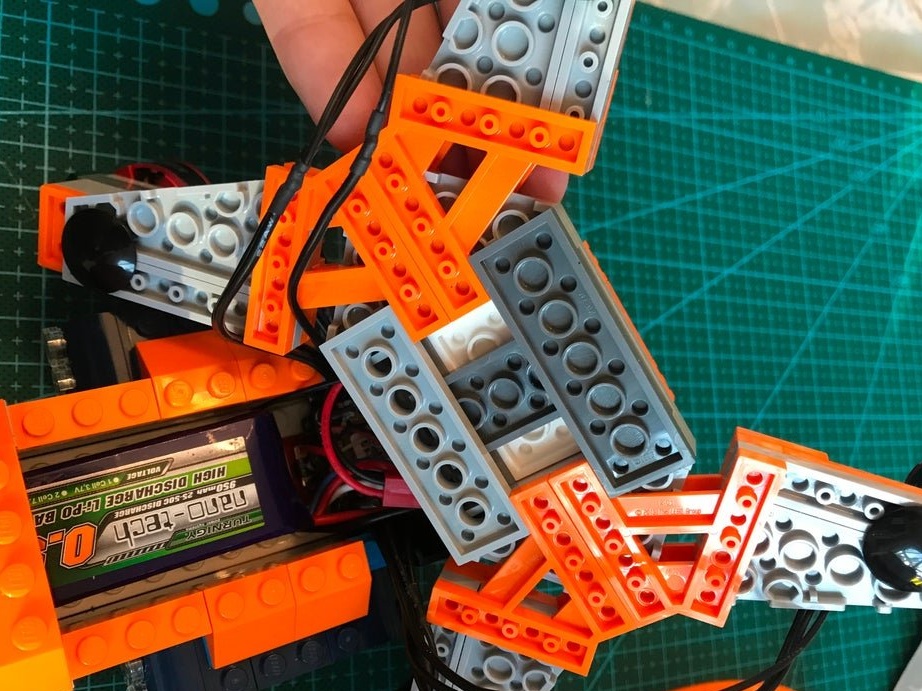
Reorganizando os "ombros" do quadrocóptero, você pode alterar levemente o layout para fornecer uma disposição mais ampla ou mais estreita dos motores e a localização dos parafusos um em relação ao outro.
O conjunto LEGO padrão (primeira foto) tem “ombros” e motores localizados largamente (horizontalmente) com uma sobreposição de parafuso bastante grande. O mestre refaz os “ombros” e aciona o motor e, consequentemente, os parafusos.



Etapa quatro: eletrônica
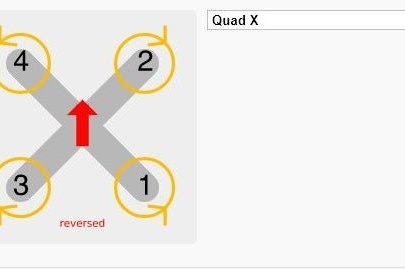
De acordo com o esquema, instala eletrônicos. A primeira foto mostra um diagrama da direção de rotação dos motores. O sentido de rotação também pode ser alterado na fase de programação.
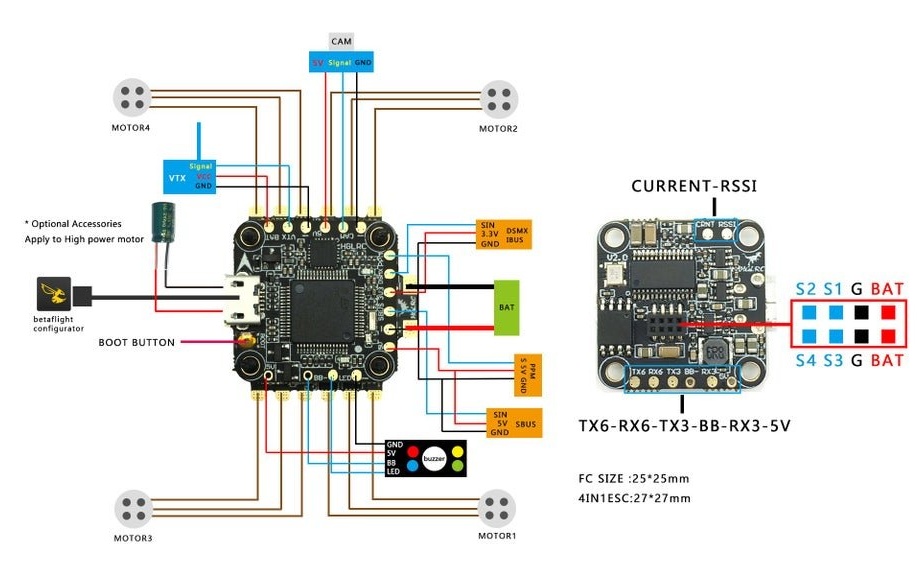

Após a conclusão da instalação e antes de conectar a bateria, o assistente verifica as conexões para evitar quebra ou curto-circuito.
Ao ligar a alimentação, você verá as luzes no controlador de vôo e alguns bipes do ESC.
Etapa 5: instalação
Agora que tudo está conectado, é hora de configurar o controlador.Isso significa baixar o software (software incorporado) que executa a tarefa de decodificar os sinais de controle do transmissor RC, processar o sinal de entrada do sensor (acelerador, giroscópios) e fornecer sinais de controle para que o ESC gire os motores a uma determinada velocidade.
Remova as hélices por segurança! Uma bateria não é necessária para as primeiras etapas de configuração, apenas energia USB.
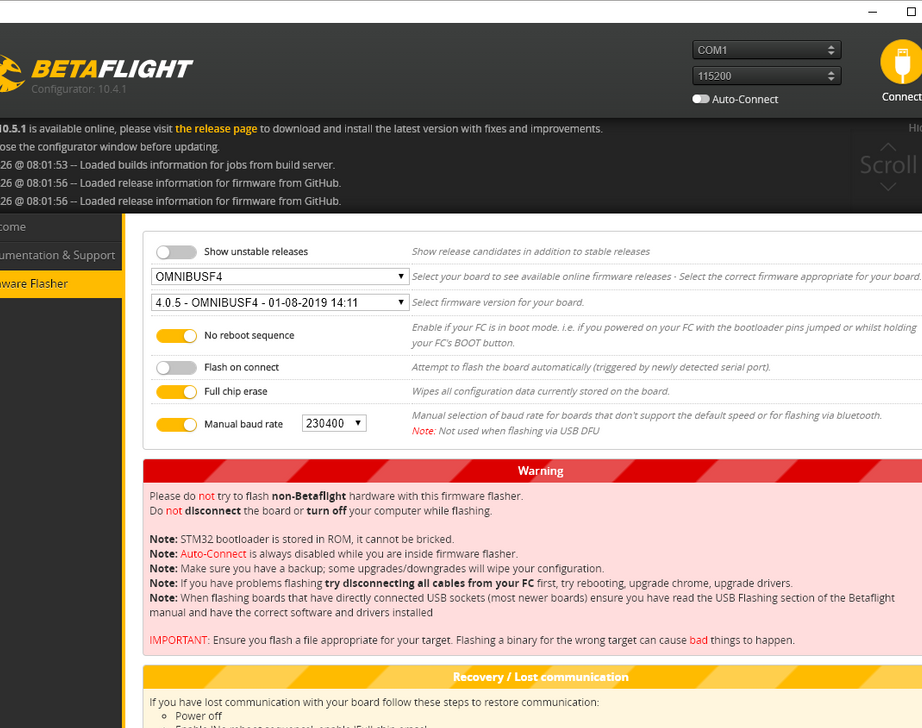
Baixar Beta Configurator
Conecte o cabo micro USB ao controlador de vôo. Observe que isso pode ser mais fácil se o controlador não estiver parafusado no chassi.
Faça o download e faça o upload do firmware apropriado para o controlador de vôo.
betaflight-settings-legoquad.txt
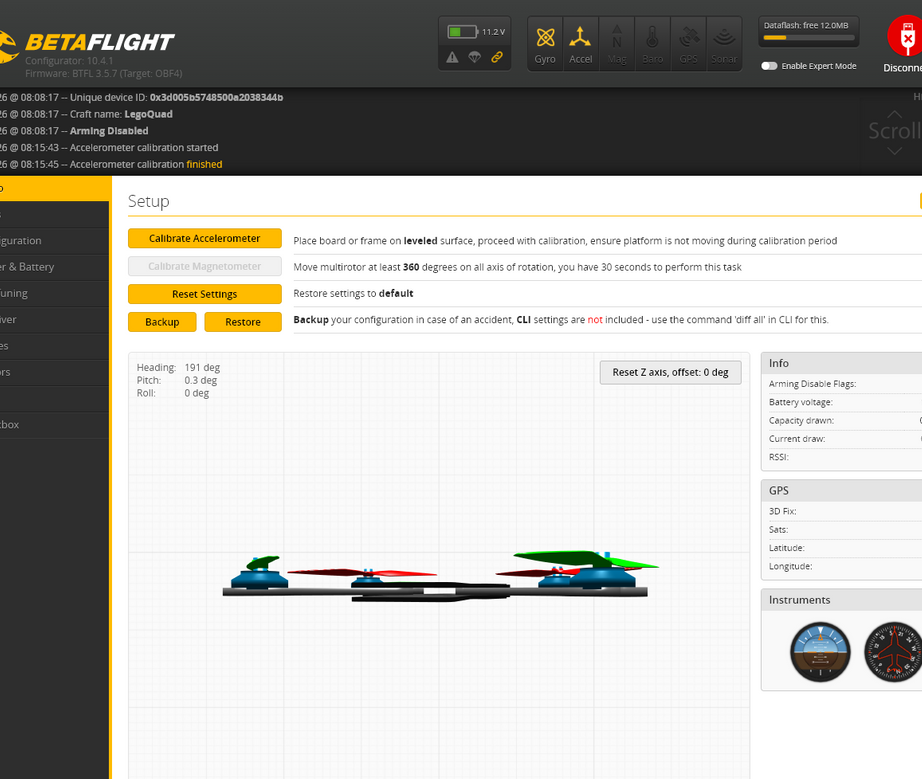
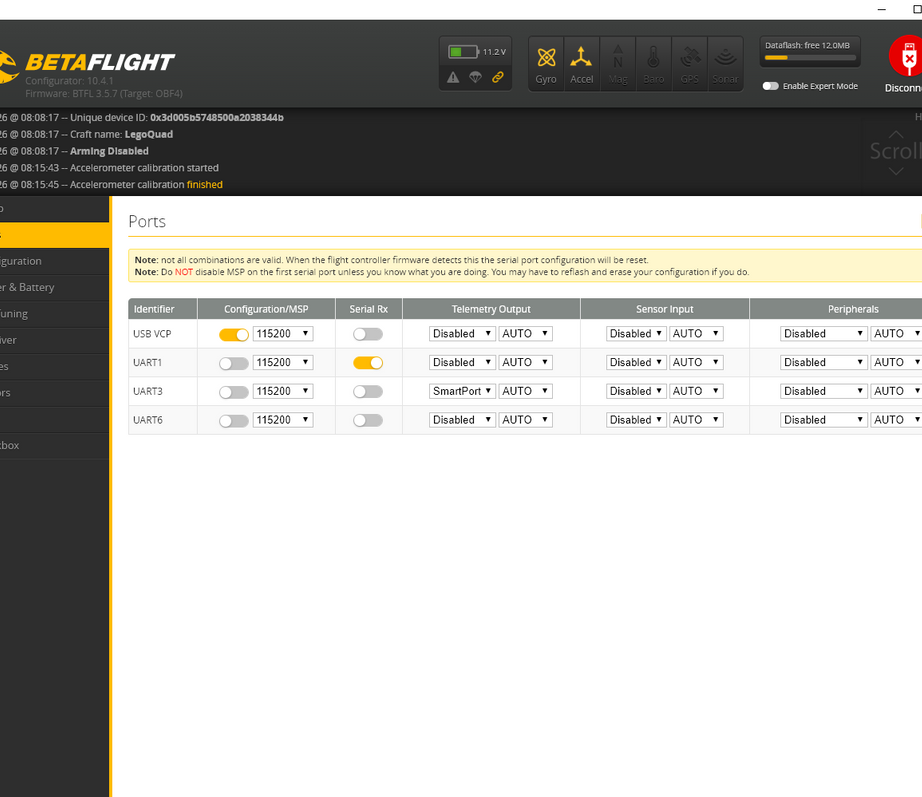
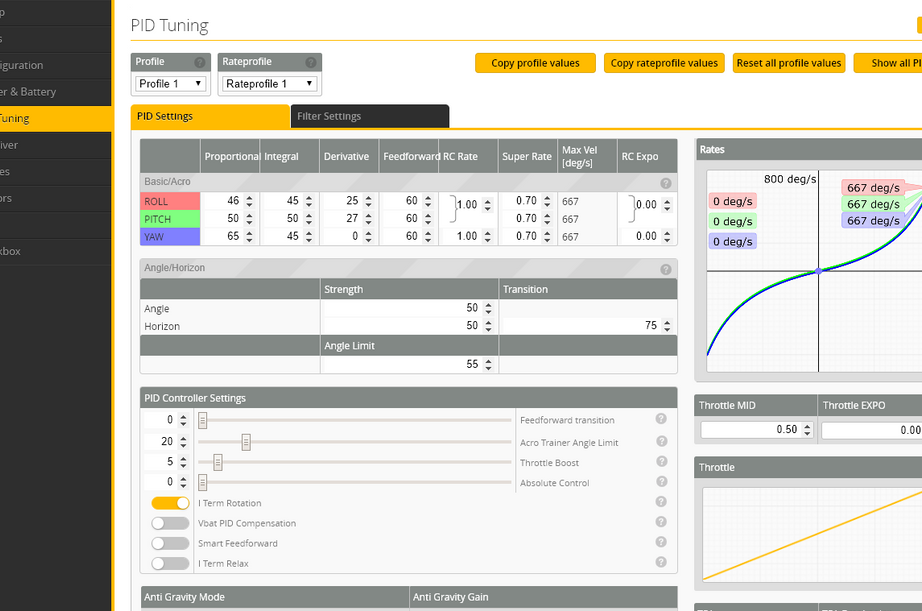
Clique no botão "Conectar" e defina as seguintes configurações:
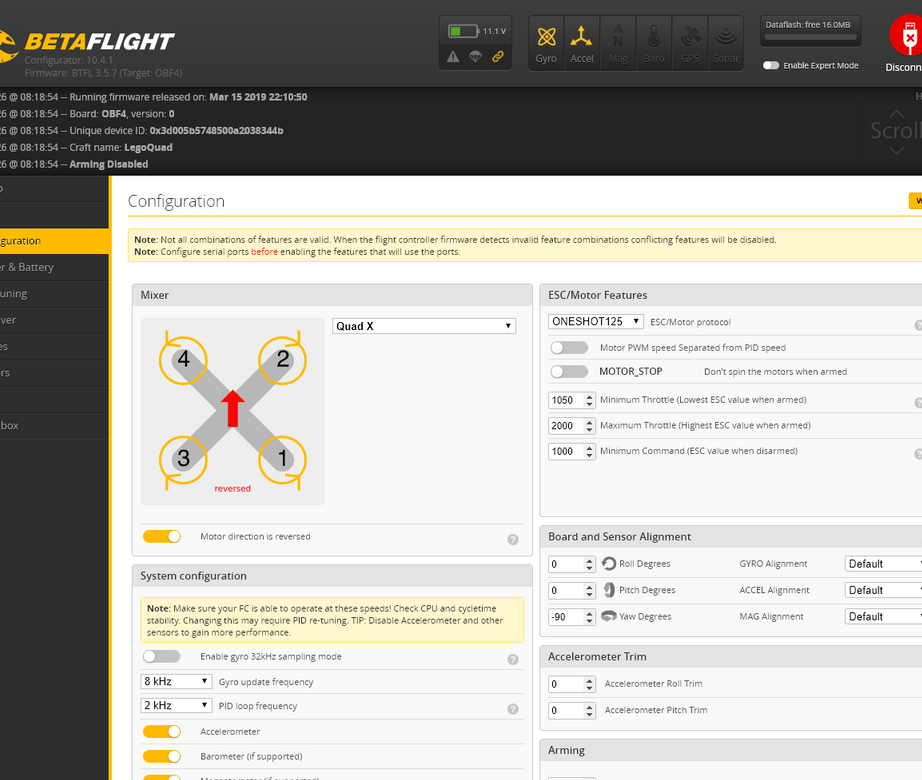
1. Instalação - calibração do modelo dos motores
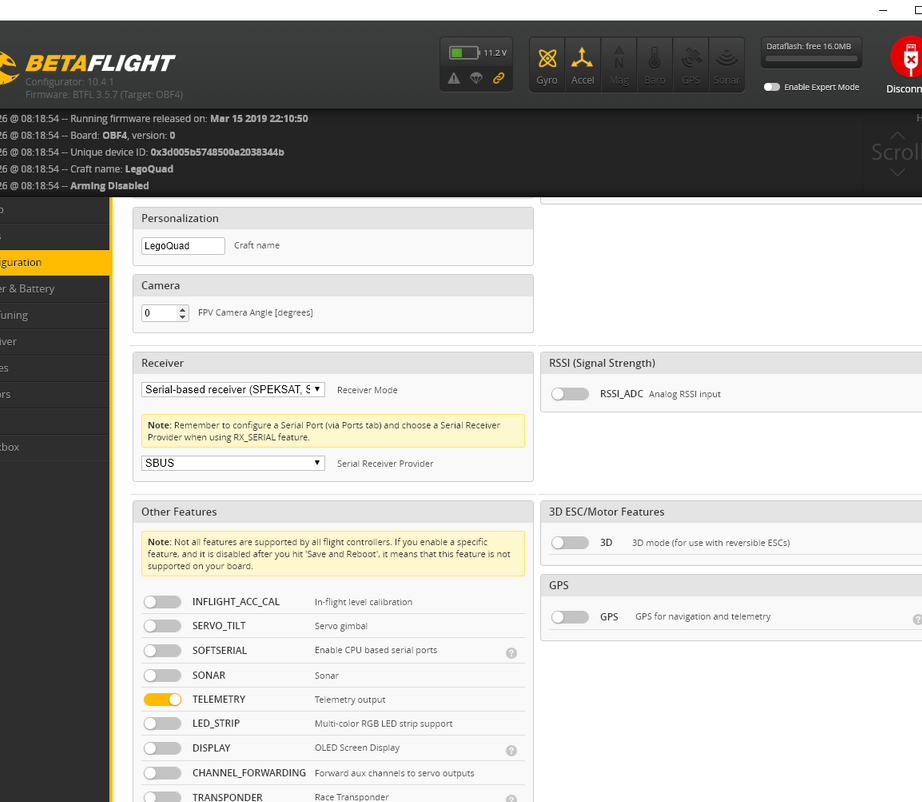
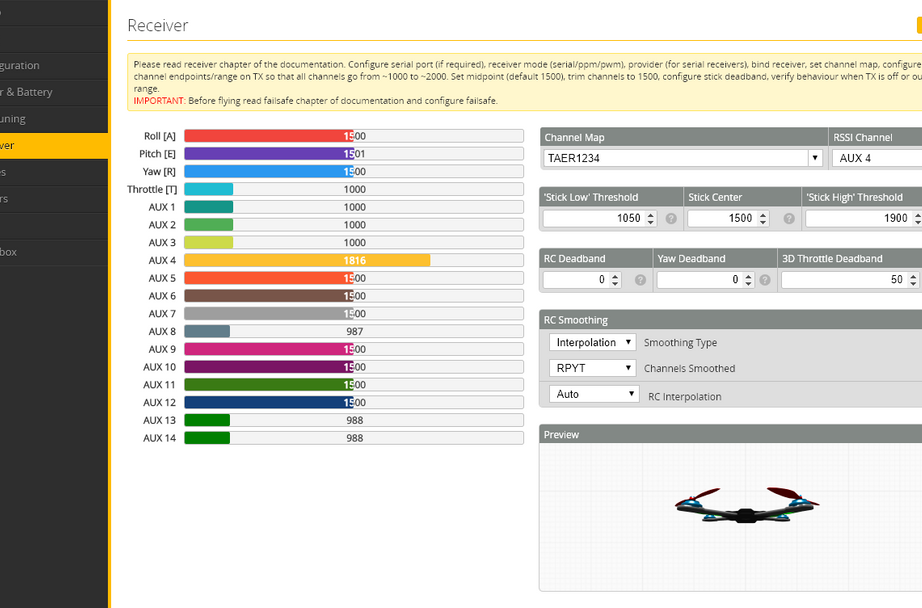
2. Especifique as portas - UART1 - Serial RX para conectar o receptor SBUS RC
3. Salvando e reiniciando
4. Estabeleça uma conexão entre o receptor e o transmissor
5. Sobrecarga
6. O valor do mestre PID está definido como 250
7 Conecte a bateria
8. Ajuste a tensão.
9. Certifique-se de que a exibição do canal e a direção do controle estejam corretas. Quando tudo estiver configurado, a imagem do modelo quadcopter no canto inferior direito deve se mover em todas as direções corretas ao mover os joysticks no controlador RC.
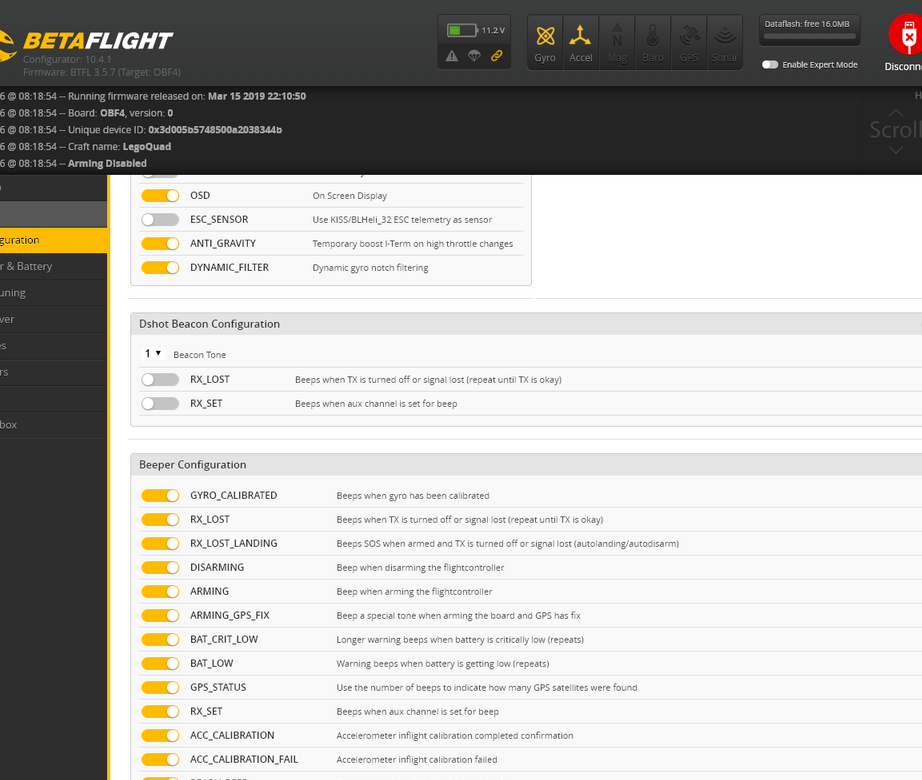
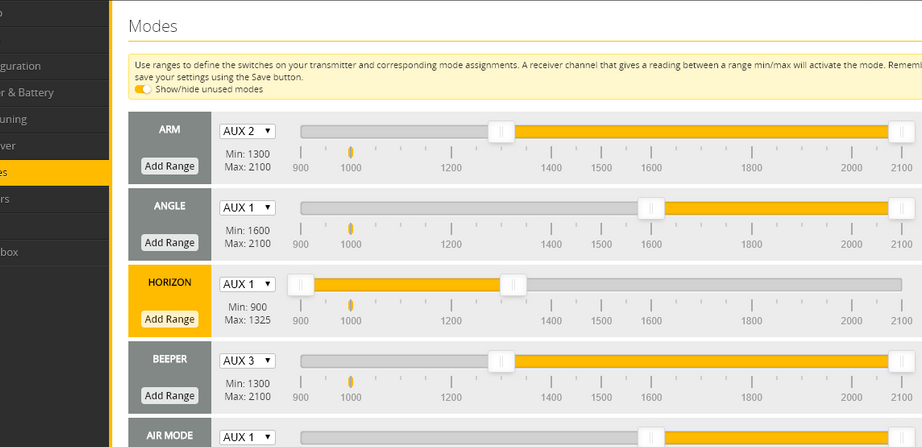
Configura os modos.
ARM ligado / desligado
Autonivelante HORIZON / ACRO para voo tradicional FPV
BEEPER - Útil se você perder o modelo em grama alta ou arbustos.
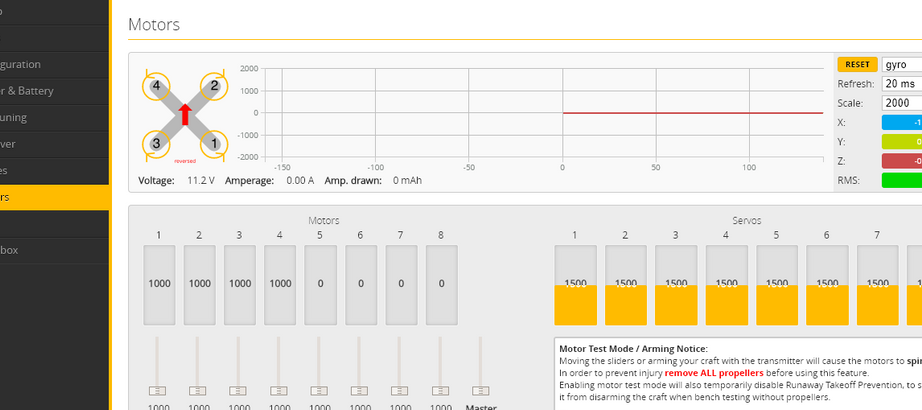
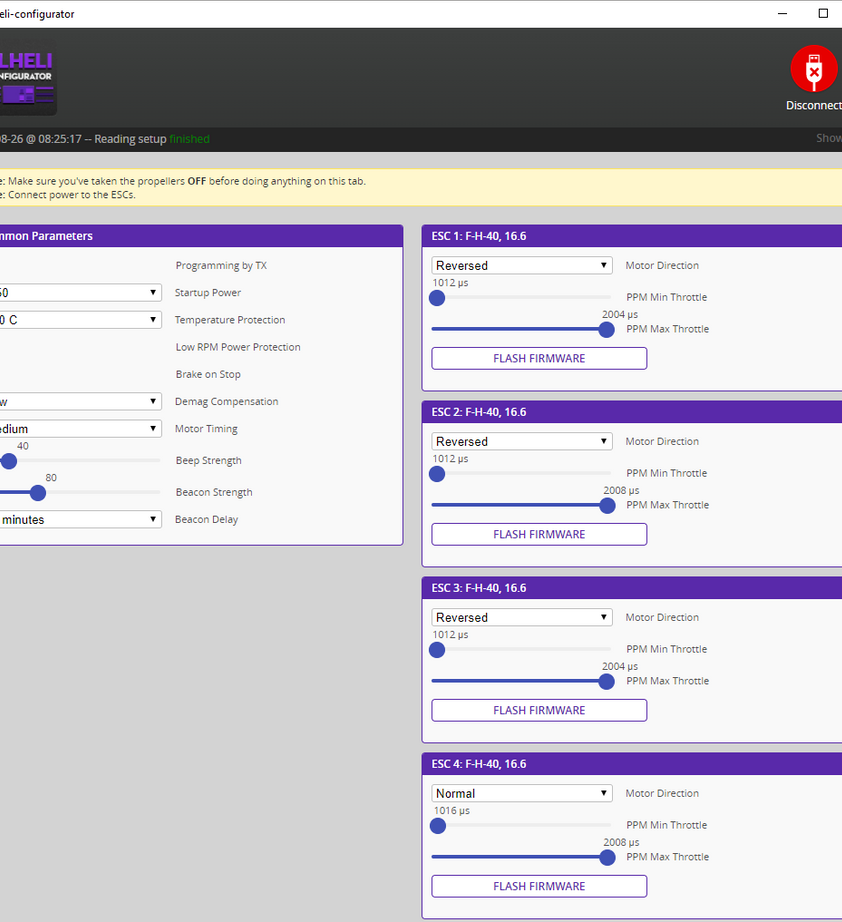
Guia "Motores" - use essa opção para verificar cada motor individualmente e, principalmente, marcar a direção de rotação de cada um deles
Corrija qualquer direção de rotação incorreta com o configurador BLHELI
Após todas essas etapas, você pode desconectar o USB e a bateria, ligar a alimentação e verificar se tudo funciona:
Ligue o transmissor e ligue
Conecte a bateria e monte o quadrocopter em uma superfície plana
Ligue o interruptor ARM e os motores devem começar a girar em baixa velocidade.
Verifique o acelerador enquanto aumenta a velocidade
No modo horizontal, tente inclinar o quadrocóptero e verifique se os motores reagem adequadamente, por exemplo, incline-o para a frente e os motores dianteiros irão acelerar.

Etapa Seis: Montagem Final
Praticamente toda a estrutura do gabinete é realizada com trava de montagem. O mestre usa apenas adesivo hot-melt para montar os motores.


Está tudo pronto e você pode testar.



