

Caros leitores, antes de você novamente eletrônico velas, mas desta vez incomum. O debate sobre o que é melhor, AVR ou PIC, não teve solo de 1976 a 1996 - todos aqueles 20 anos em que o PIC já estava e o AVR não estava lá. E então começou e continua até hoje. O autor, sob o apelido de Thierry, decidiu participar dessa disputa de ambos os lados, fabricando dispositivos que tinham objetivos idênticos e características próximas a ambos. Portanto, independentemente do resultado, ele venceu por conta própria e brigou consigo mesmo. Vamos ver como isso aconteceu.
O assistente começa selecionando microcontroladores para as duas opções. caseiro. Portanto, do lado do Atmel, o chip ATTiny25 entra no ringue, e do lado do microchip - PIC12LF1822. Ambos são de oito pinos, que não requerem circuitos de temporização externos para o gerador de clock. Agora é hora de pensar no algoritmo. O mestre para nisso. Depois de detectar a escuridão, a vela eletrônica sai do modo de suspensão e começa a piscar, a intensidade da oscilação muda a cada minuto. Após três horas, ele volta ao modo de suspensão e, quando fica claro e escurece novamente, o ciclo se repete.
A diferença nas pinagens dos microcontroladores não permitiu tornar o circuito de ambas as opções iguais. Aqui estão dois diagramas em uma figura:
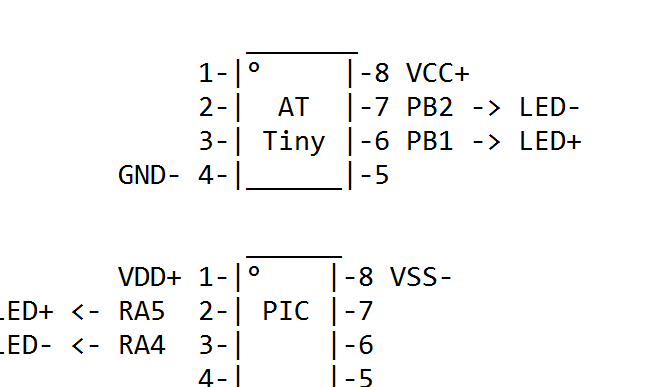
O princípio de operação para ambos os esquemas é o seguinte. LEDs podem funcionar como fotodiodos. Para alternar entre os modos LED e fotodiodo, nenhuma reconexão externa é necessária, pois os dois microcontroladores podem alternar programaticamente suas saídas para o modo de entrada e o modo de saída. Bem, agora as diferenças começam. O mestre não conseguiu que o ATtiny interagisse com o programador em uma frequência inferior a 500 kHz, e eu tive que escolher. O PIC conseguiu diminuir para 31 kHz.
No modo de suspensão, a opção no AVR consome 4 μA, no PIC - menos de 1 mA. "Acordando", mas não sendo carregado no LED - respectivamente 190 e 5 μA - aqui a diferença é enorme. No modo de operação e sob carga na forma de um LED - 2500 e 2300 μA, respectivamente. Mas a diferença no número de dias que a bateria dura se o dispositivo sair do modo de suspensão por três horas por dia é pequena. AVR - 30 dias, PIC - 33.Se, na versão AVR, o brilho médio é reduzido pelo PWM, você pode "retirar" os mesmos 33 dias dele.
O mestre gostou da capacidade do PIC de consumir apenas 5 μA, enquanto NÃO estava no modo de suspensão e fazia alguns cálculos. No AVR, mesmo com uma diminuição na frequência do relógio para 128 kHz, o consumo atual permanece bastante grande - 110 μA. Mas aqui você pode aplicar esta técnica: ative o microcontrolador do modo de suspensão, por exemplo, a cada 100 milissegundos por apenas uma porcentagem do tempo.
Para produtos caseiros, qualquer um dos seguintes tipos de microcontroladores é adequado: ATTiny25 / 45/85 ou PIC12 (L) F1822 / 1840. O LED é amarelo, como LTL2T3YR6JS, sua tensão de abertura é menor que a do branco. O código C é apresentado em dois arquivos: e.
A parte traseira da placa com o suporte da bateria original é mostrada abaixo:
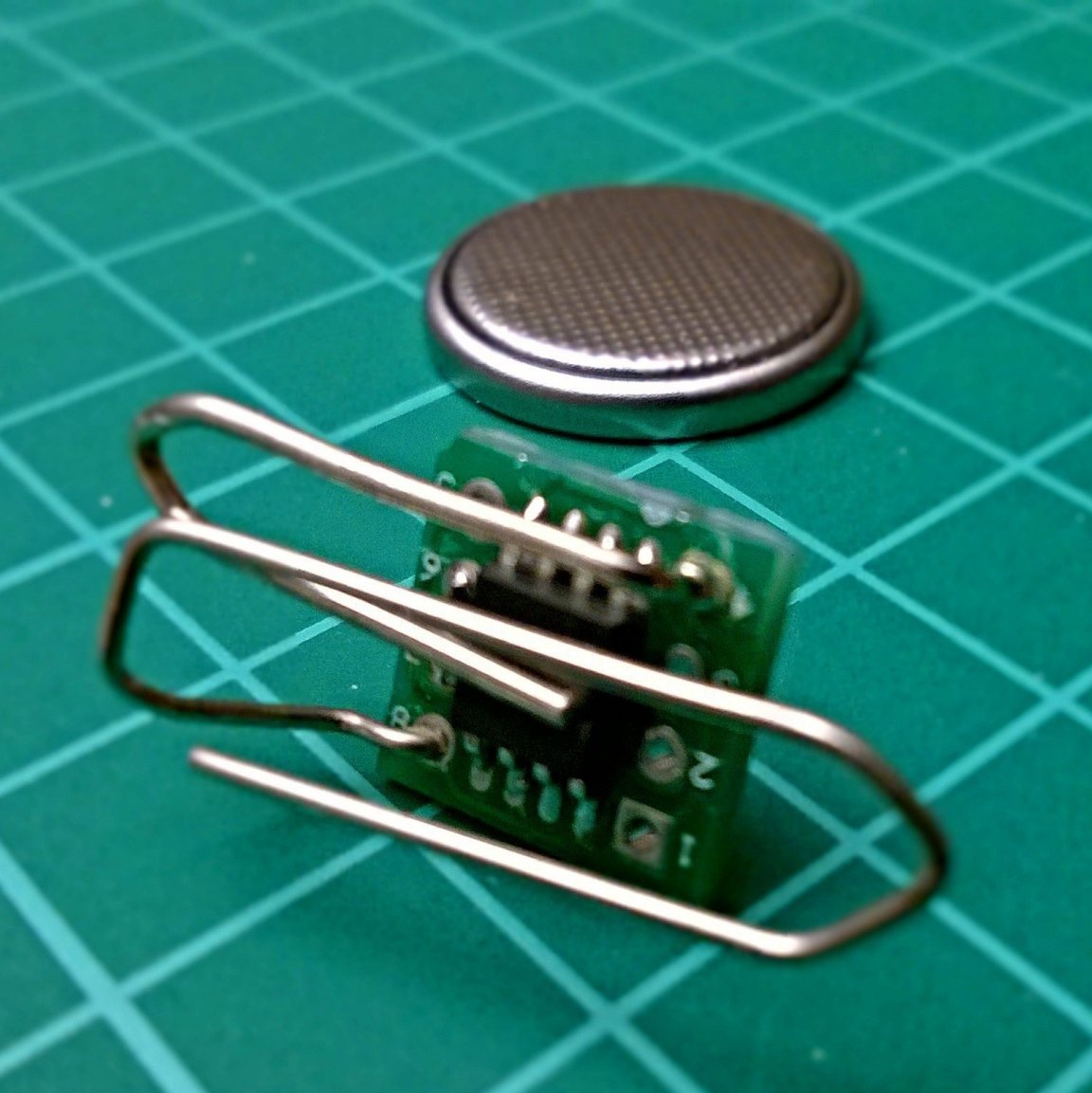
Como você pode ver, o mestre criou uma versão da placa - frente e verso, com almofadas para os dois tipos de microcontroladores. Ele não traz a placa-mãe da placa, mas para o design de três peças, incluindo a bateria, não é necessário, você pode conviver com uma peça da placa de ensaio como a perfboard.
Agora determine o vencedor. Sem técnicas adicionais de economia de energia, o PIC vence. Com eles, você pode obter o mesmo número de dias de trabalho de um elemento, portanto é um empate. Ambas as opções superam uma vela de chá real, que ocupa um volume ainda maior - ela não será capaz de brilhar por tanto tempo. Porém, quando usado para o propósito a que se destina - manter o chá em estado quente - ele já vence, já que o substituto eletrônico não é capaz disso.
É bom que o mestre seja capaz de programar os dois tipos de microcontroladores. Essas pessoas não têm tempo para holívoros (exceto os cômicos, é claro); eles rapidamente treinam o que precisam para trabalhar direta e diretamente. Eles fazem funcionários muito valiosos.