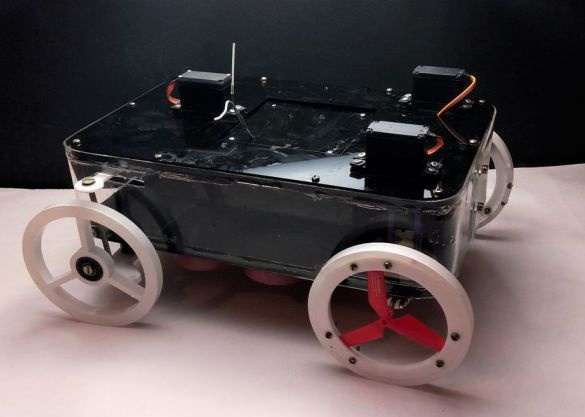



Neste artigo, consideraremos a fabricação, por artesãos indianos, de um veículo todo-o-terreno em movimento tanto em terra como na água. Veículo todo-o-terreno consiste em uma plataforma flutuante com rodas e uma hélice. Os mecanismos são controlados por controle remoto via Arduino UNO.
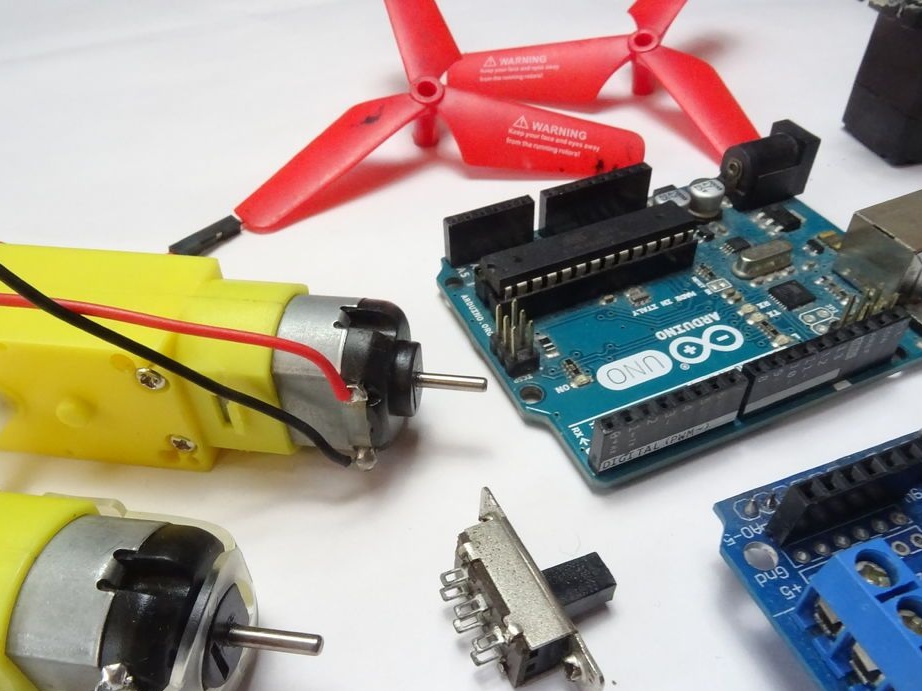
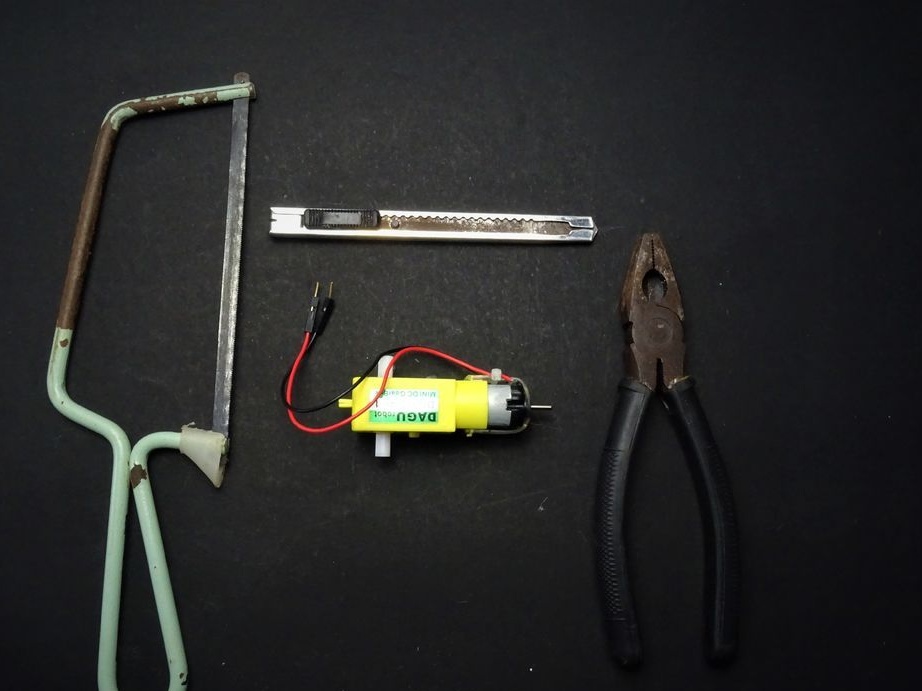
Ferramentas e materiais:
-
-AKB 9V;
-Mudar;
-Crilo;
Contraplacado;
(por referência, o rolamento é 8 x 16 x 5 mm, o autor indica 8 * 22 mm)
-Duas hélices;
-Fixadores;
-Floats;
-Pistola de cola;
-Super cola;
Resina epóxi;
Ferro de solda;
-Broca;
-Cortador a laser;
-Saw;
- chave de fenda;
-Broca;
Ferro de solda;
-Board;
-Computador com software;


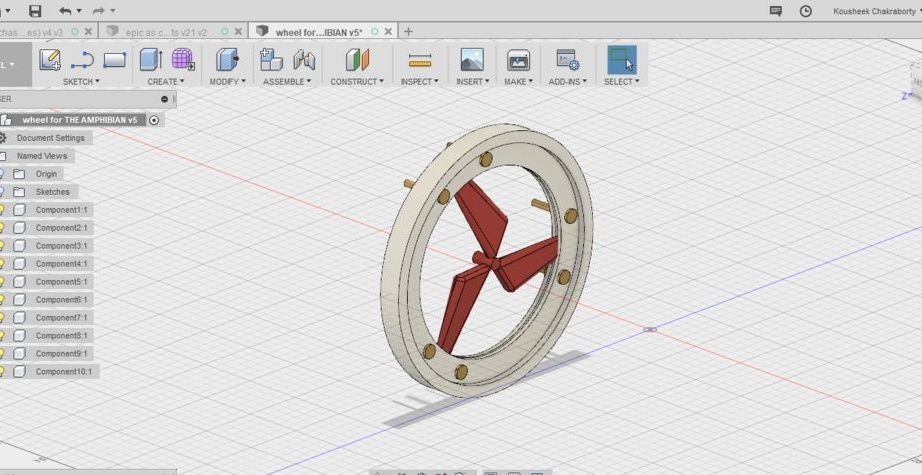
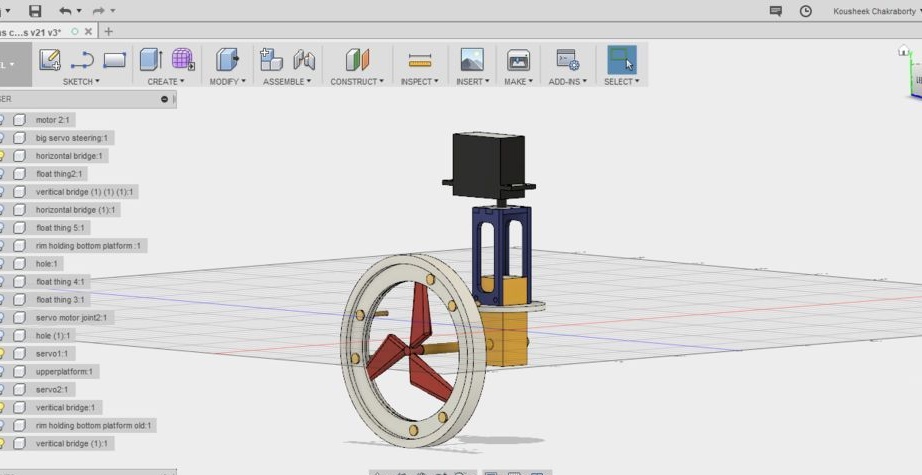
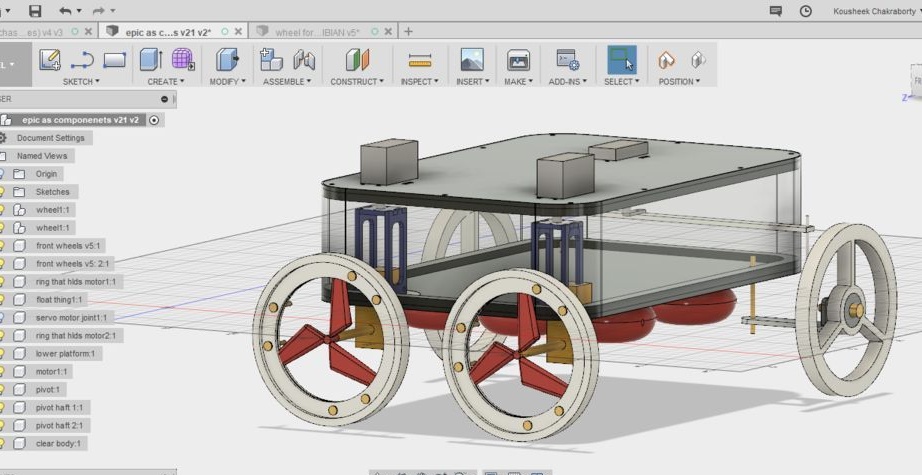
Etapa 1: Design
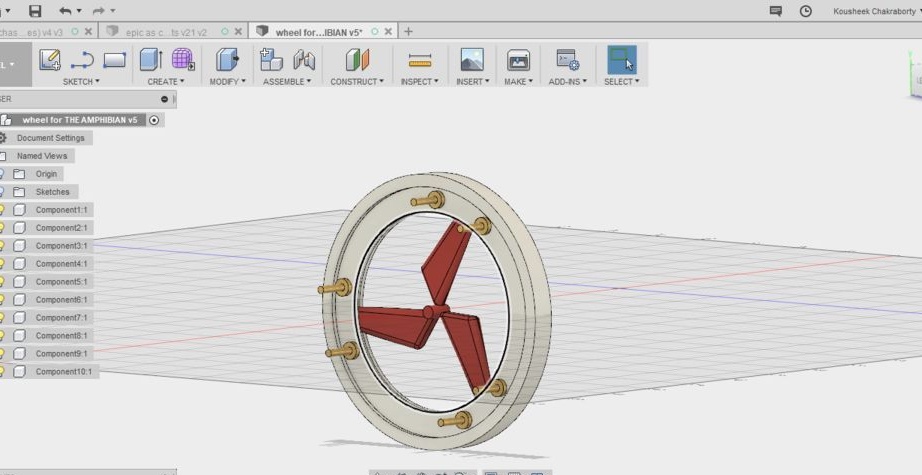
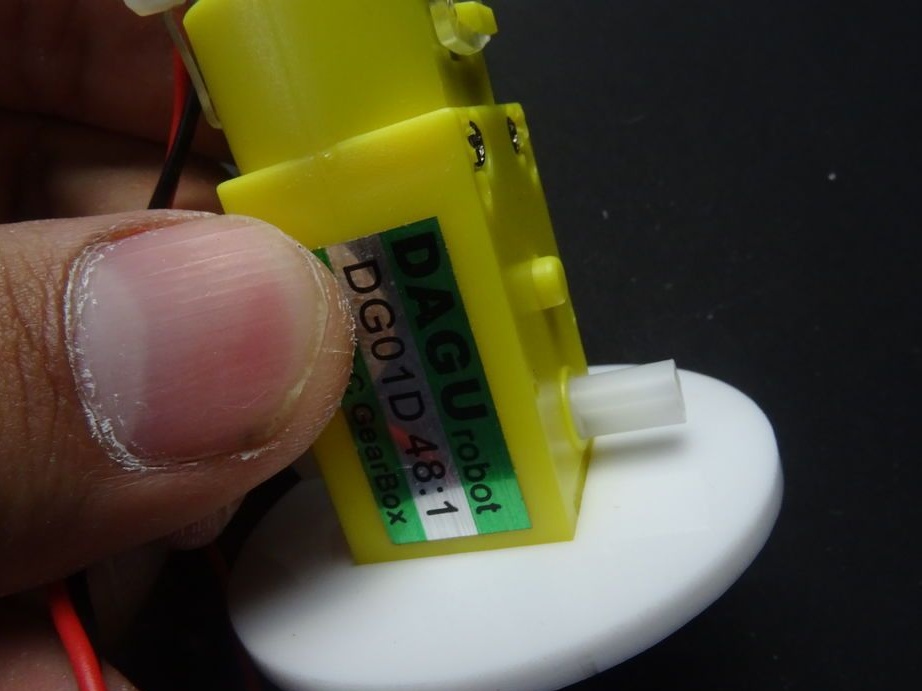
Para criar o projeto, os mestres usaram o programa Fusion 360. Toda a dificuldade era combinar movimento em terra e na água. Ao projetar as rodas, os mestres desenvolveram um sistema no qual os parafusos se abririam na água, mas, devido à complexidade do projeto, eles simplesmente integraram as hélices do brinquedo infantil dentro da roda. Isso permite que as rodas movam o veículo todo-o-terreno em terra e, quando entram na água, os parafusos são acionados.
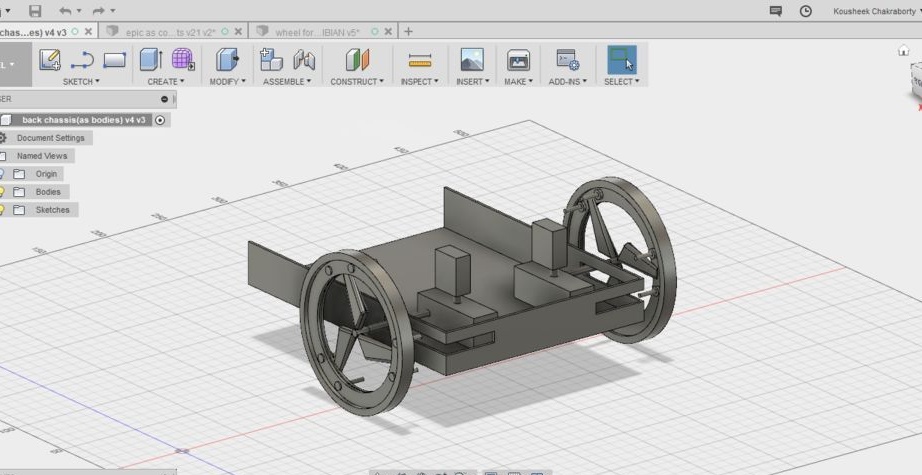
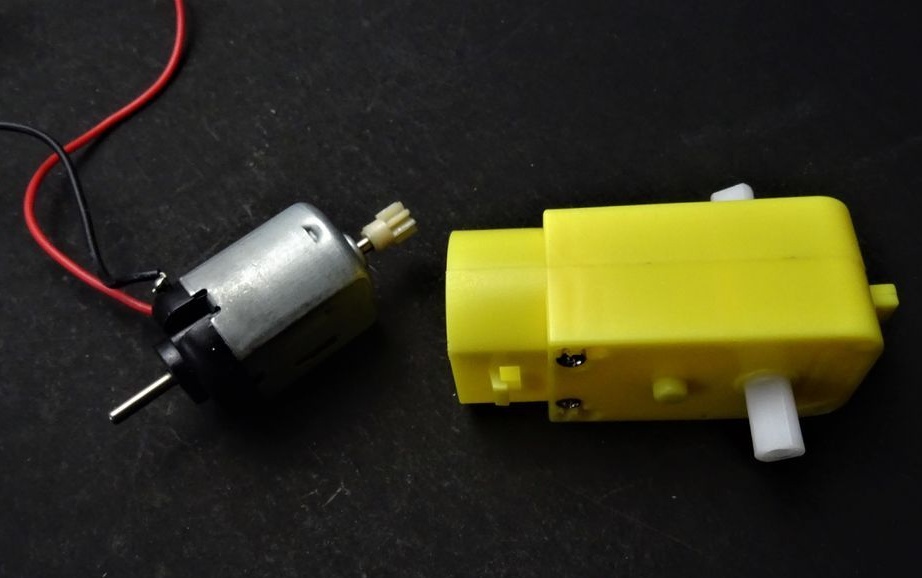
Para implementar essa idéia, você deve poder girar as rodas traseiras perpendiculares ao veículo todo-o-terreno ao dirigir sobre a água. Isso se tornou possível quando as engrenagens do motor foram retiradas do quadro. Caixas de velocidades de plástico e água que entra nelas não serão prejudiciais.
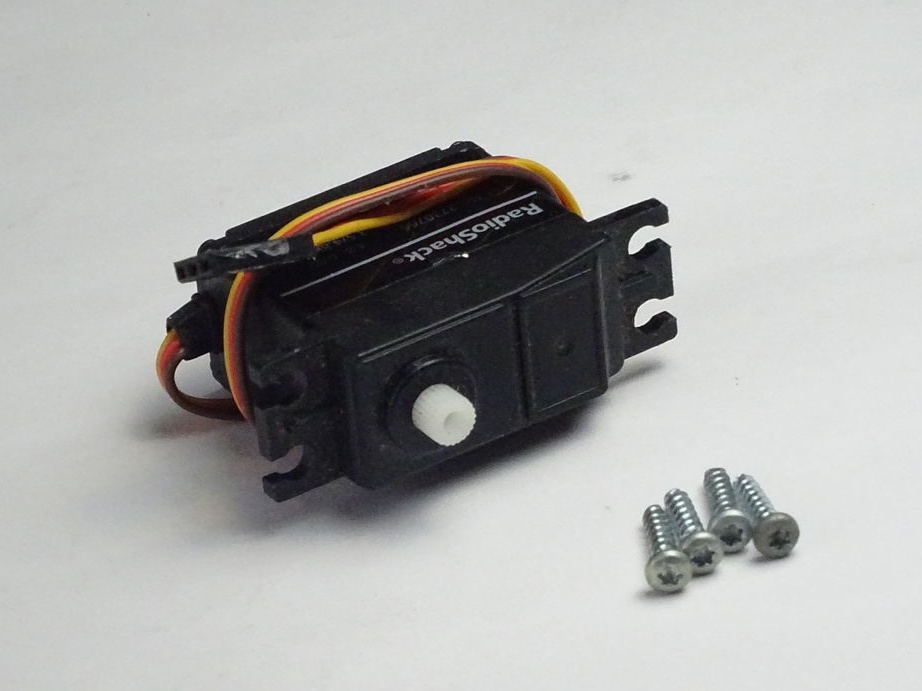
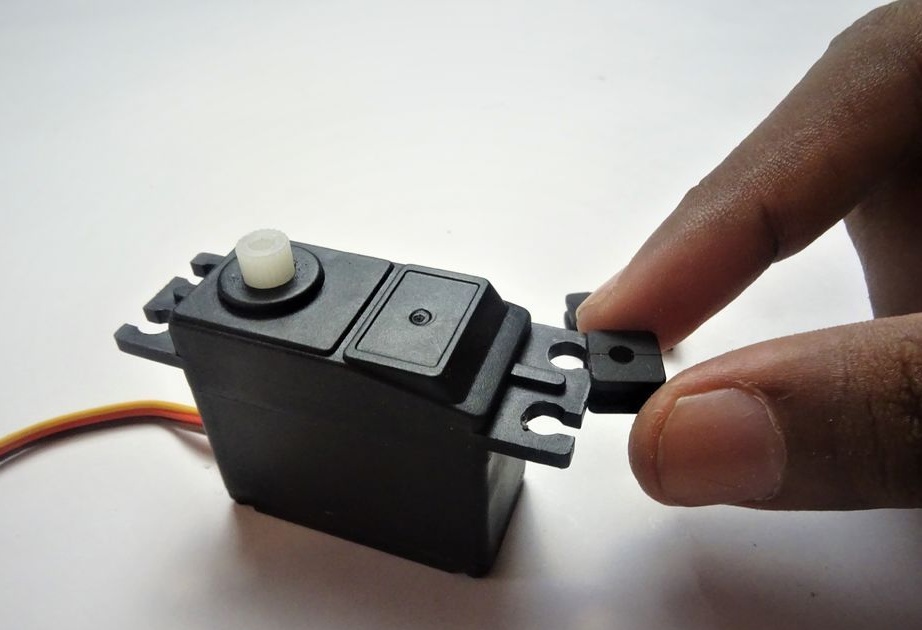
A rotação dos parafusos da roda será realizada usando um servoconversor.
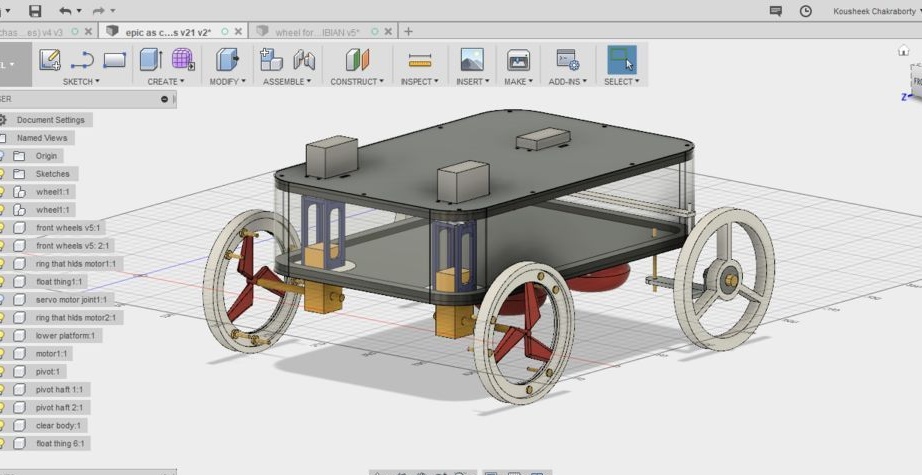
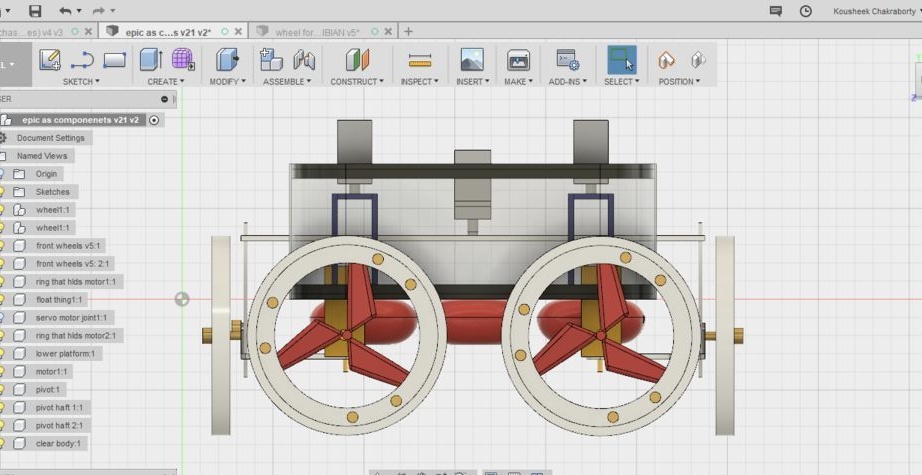
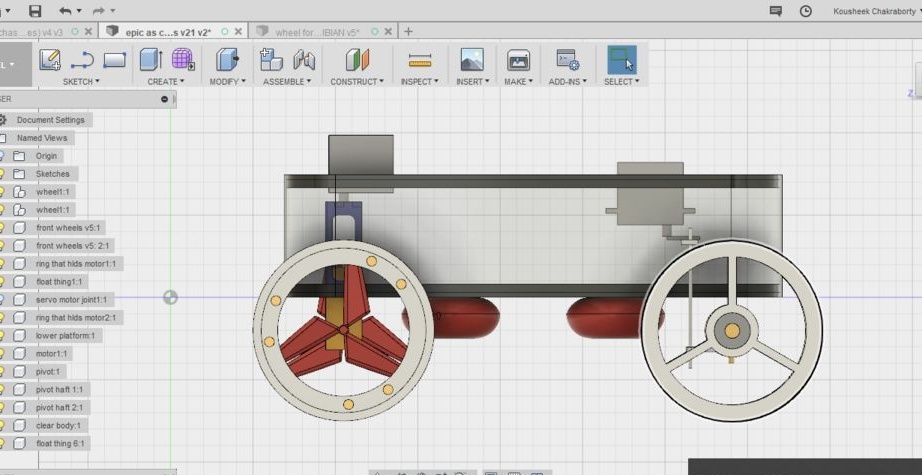
O veículo todo-o-terreno possui dois mecanismos de viragem. Um para controlar as rodas traseiras das hélices na água e o segundo para dirigir em terra controla as rodas dianteiras. O ângulo de rotação das rodas dianteiras é de 35 graus, o que permite fazer curvas fechadas.
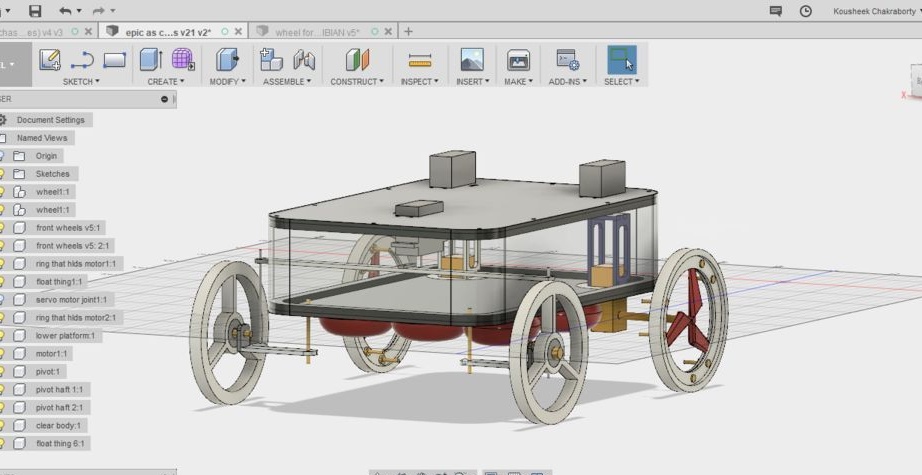
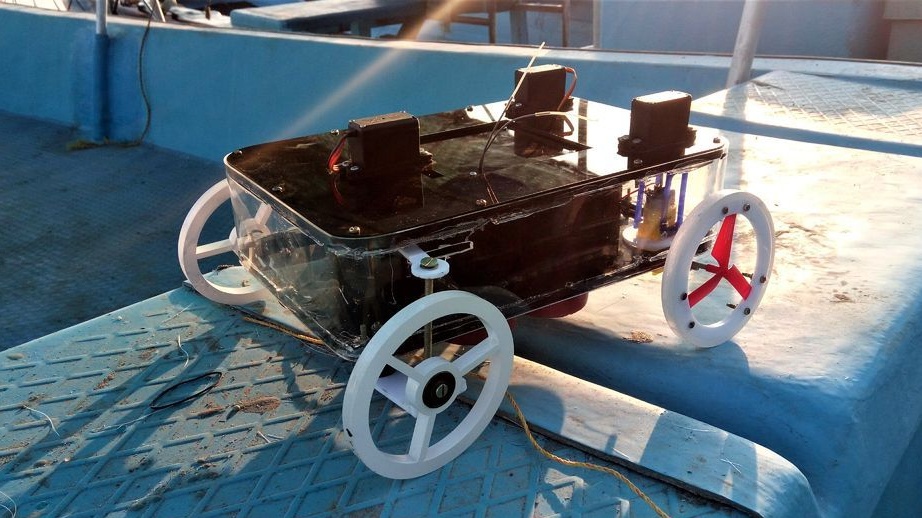
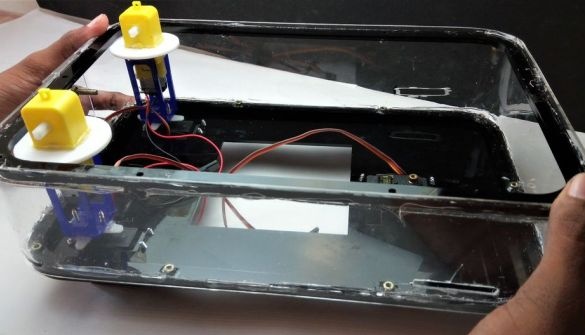
Nas fotos abaixo, você pode ver a transformação do veículo todo-o-terreno ao se mover pela terra e pela água.
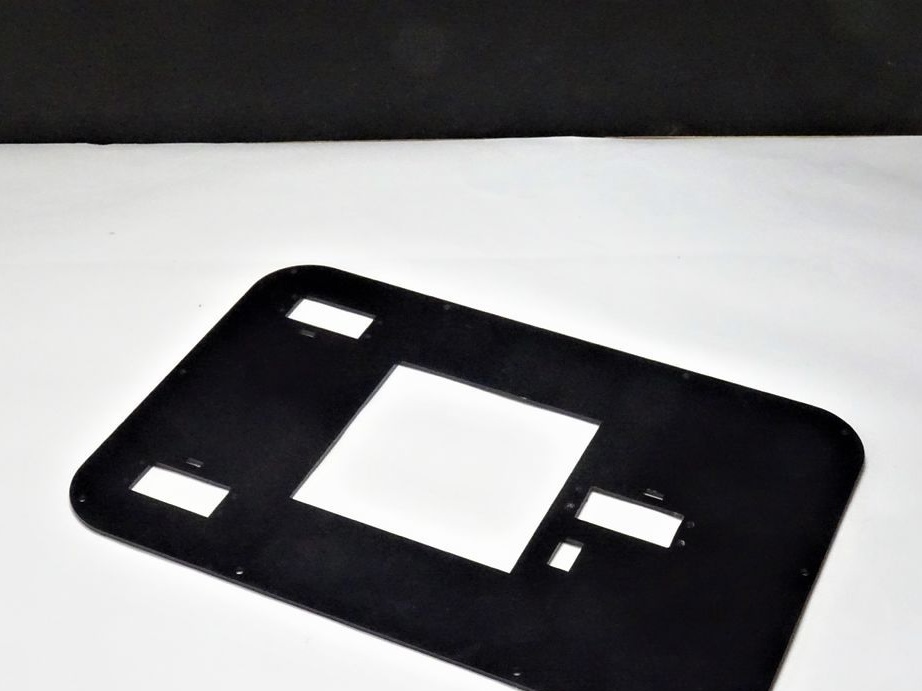
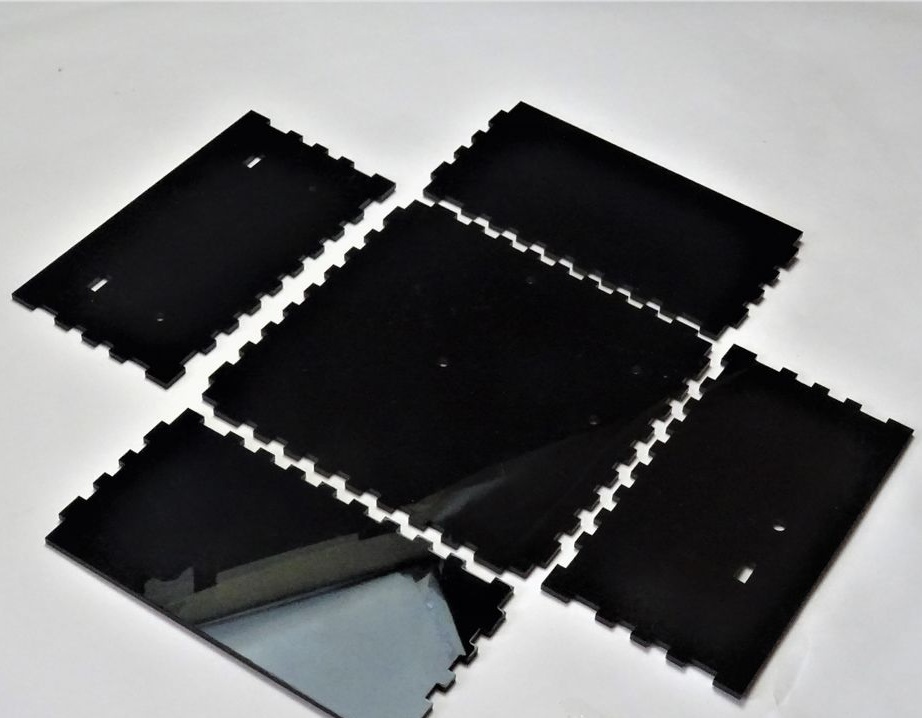
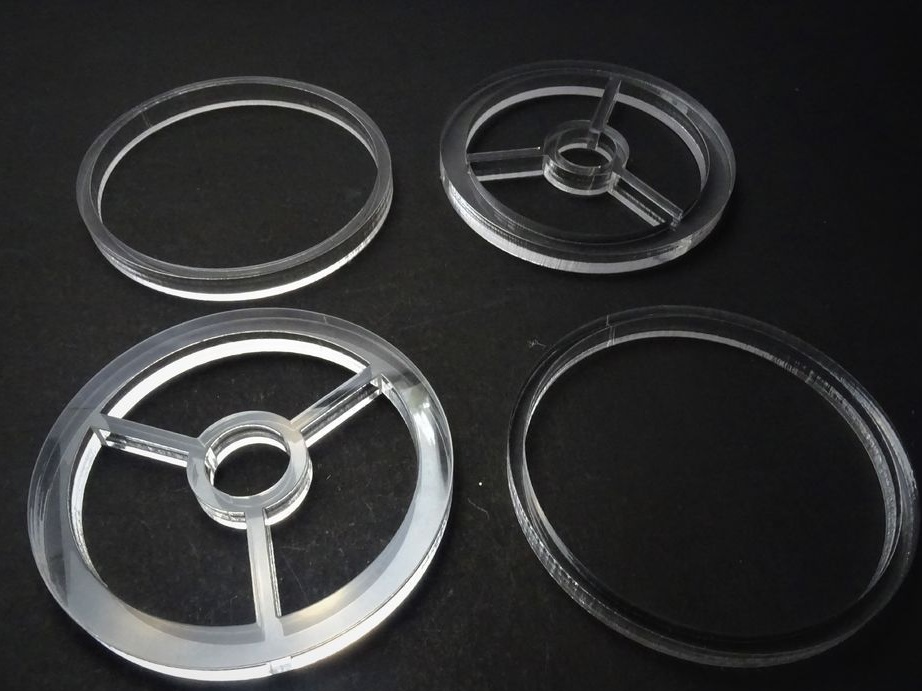
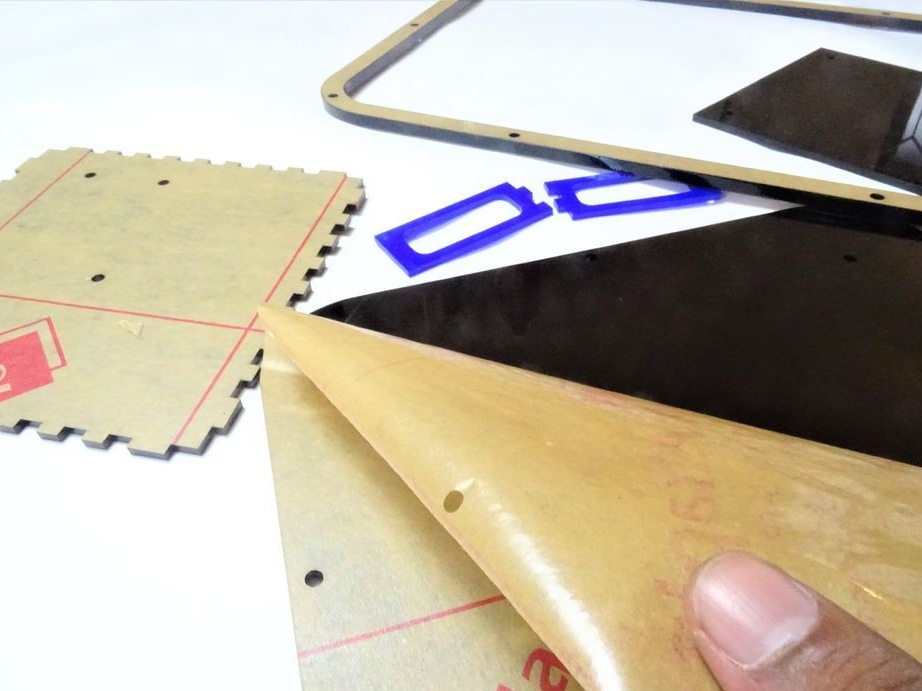
Etapa 2: Corte a laser
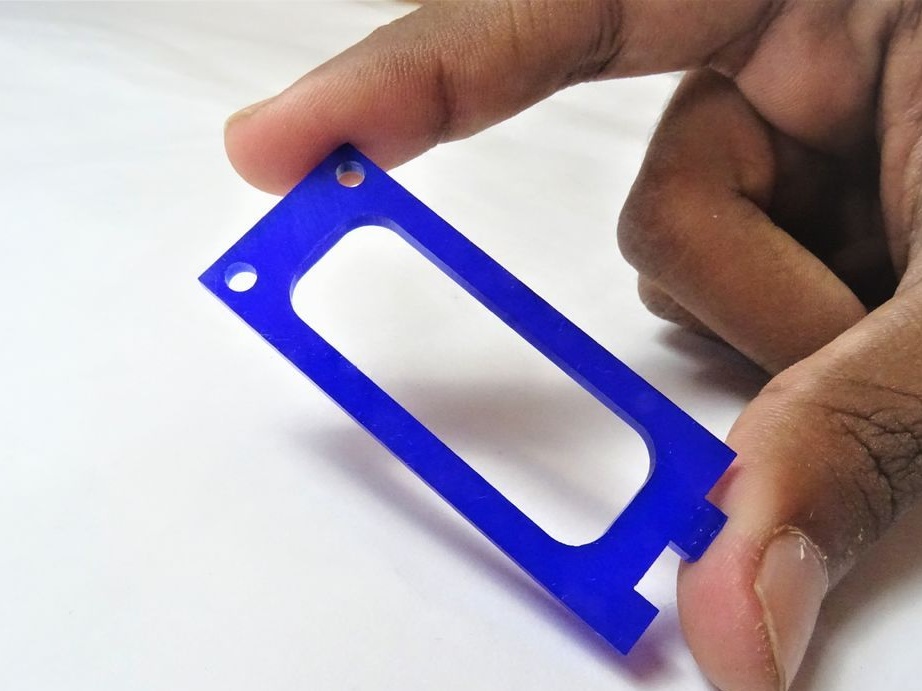
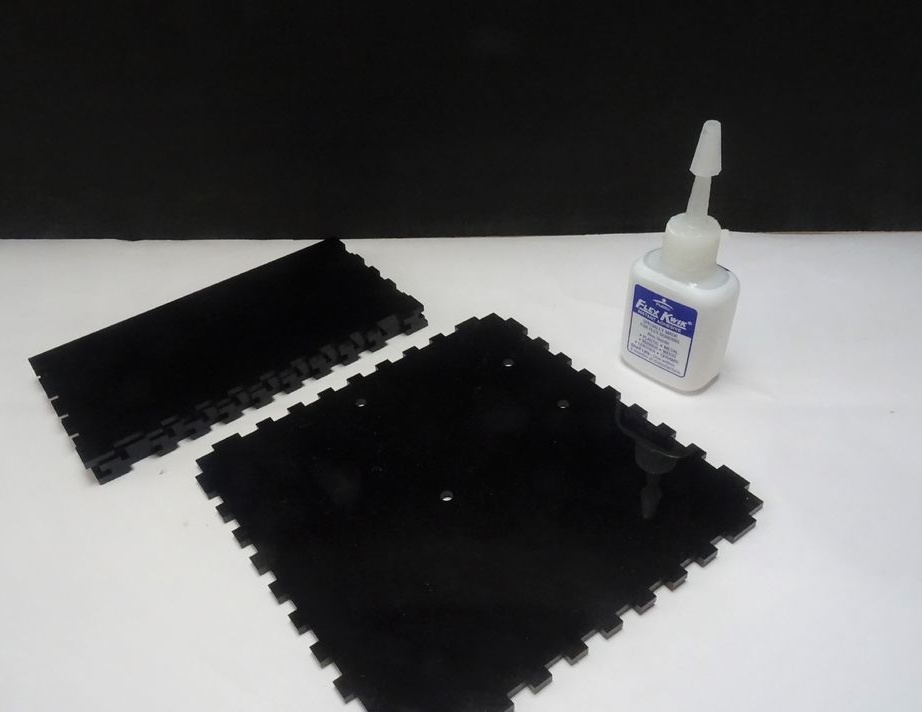
Para o veículo todo-o-terreno, o mestre usava acrílico de diferentes espessuras e cores.
Revestimento preto 3 mm x 1
Camada inferior preta 3 mm x 1
Armação lateral preta 5 mm x 2
Parede lateral transparente 2 mm x 1
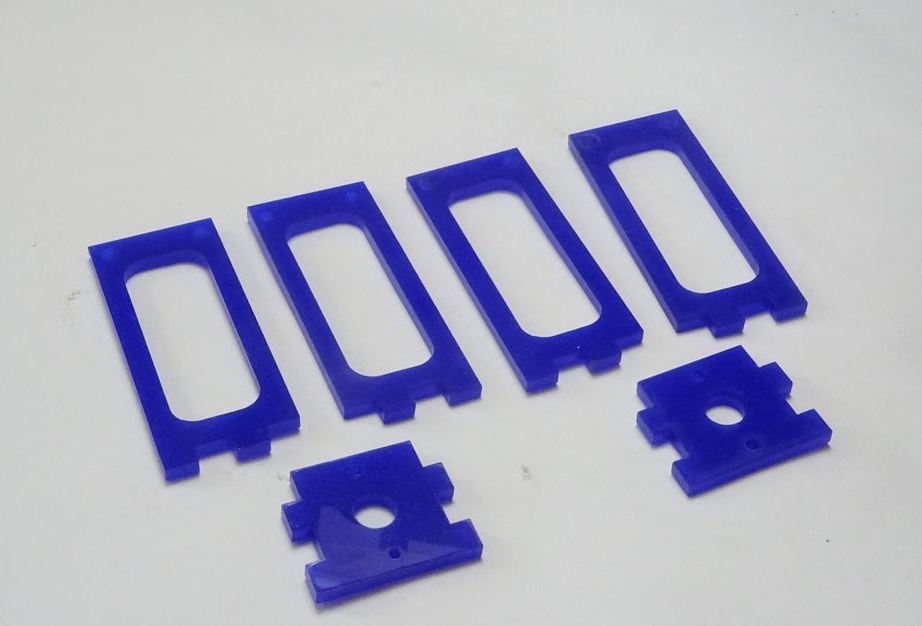
Lado da alimentação azul 3 mm x 4
Ponte Top Piece Azul 3 mm x 2
Disco do motor branco 3 mm x 2
Roda dianteira branca 10 mm x 2
Aro interno (roda traseira) branco 3 mm x 4
Jante externa (roda traseira) Branca 10 mm x 2
Branco de Direção 3 mm x 1
Armário de gavetas Preto 3 mm x 1
Tampa preta do compartimento 3 mm x 1
Eixo do motor traseiro branco 3 mm x 2
Painel frontal branco 5 mm x 2



Você pode fazer o download do arquivo para o CNC no link
Peças de corte a laser Rover.zip
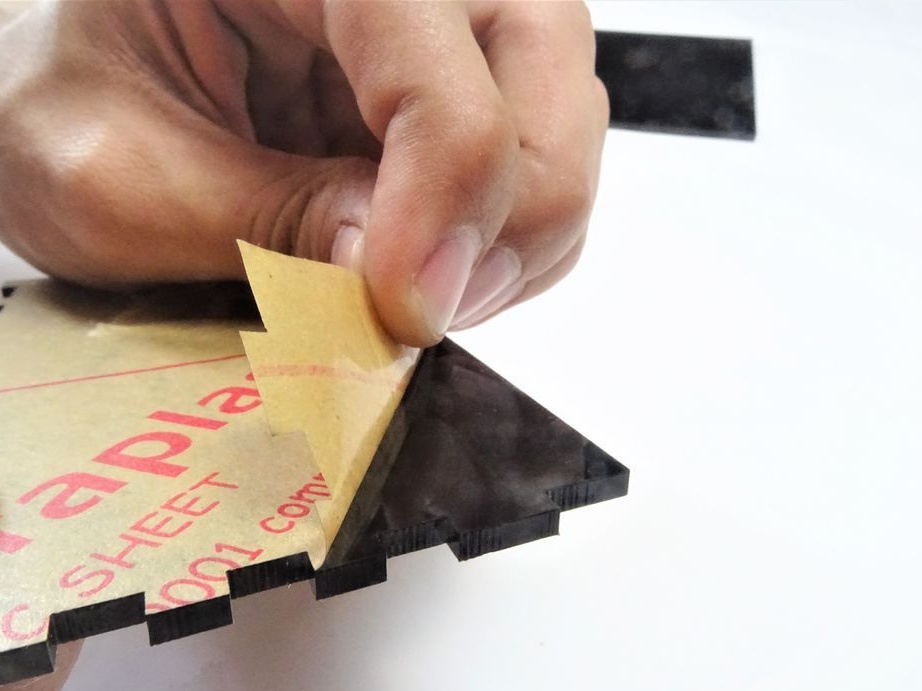
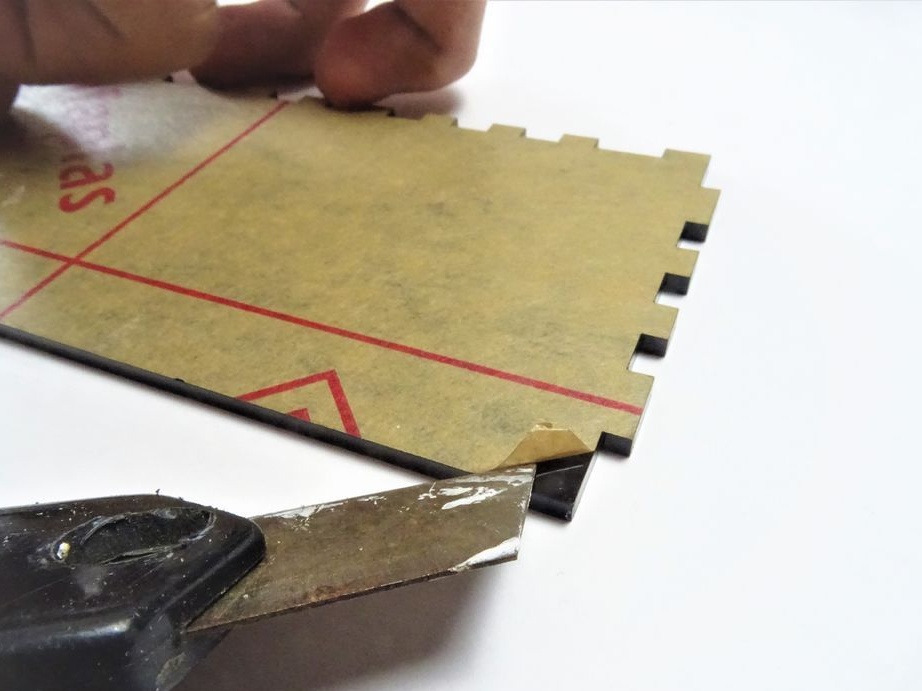
Depois de fabricar as peças, remove a camada protetora delas.
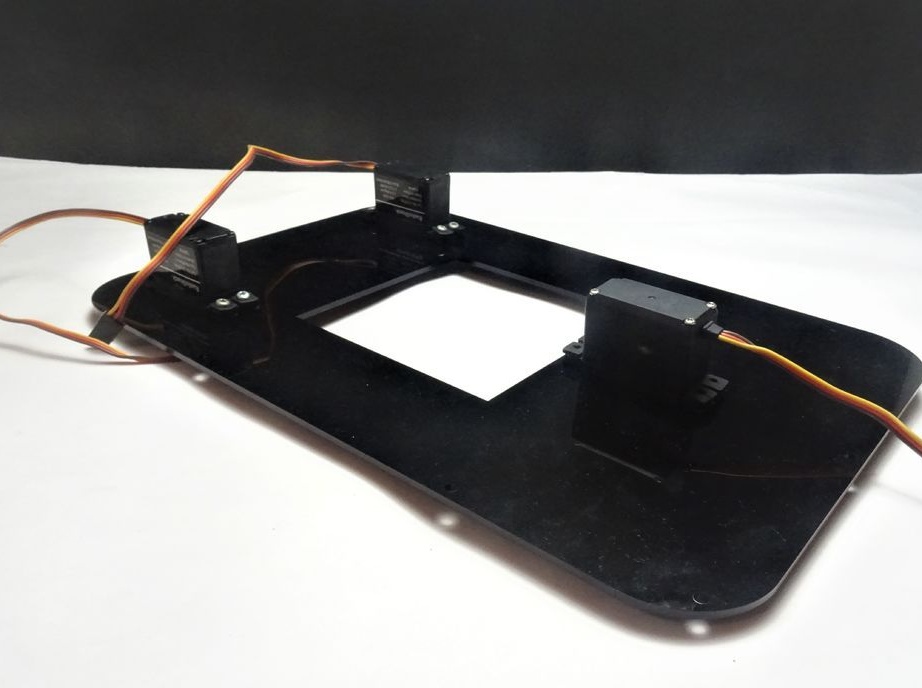
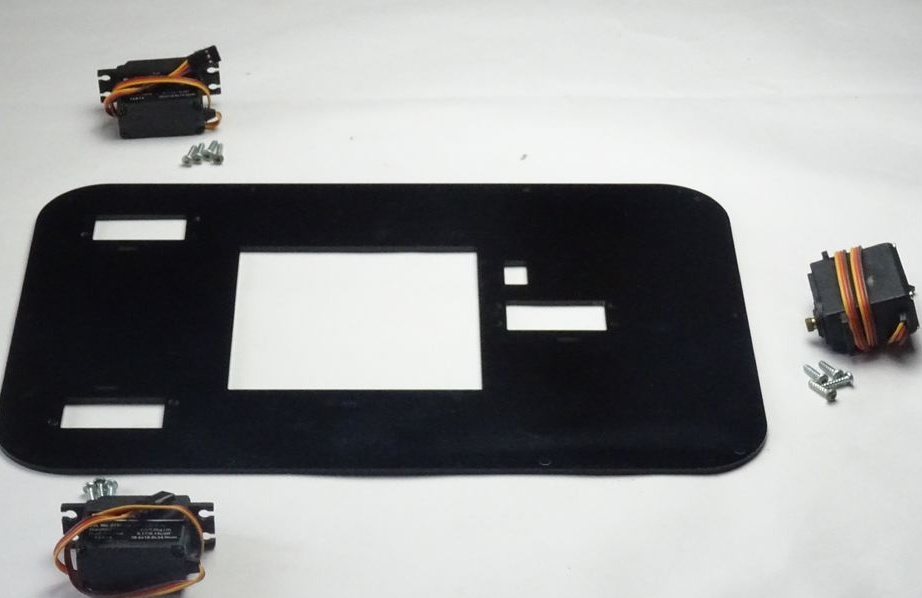
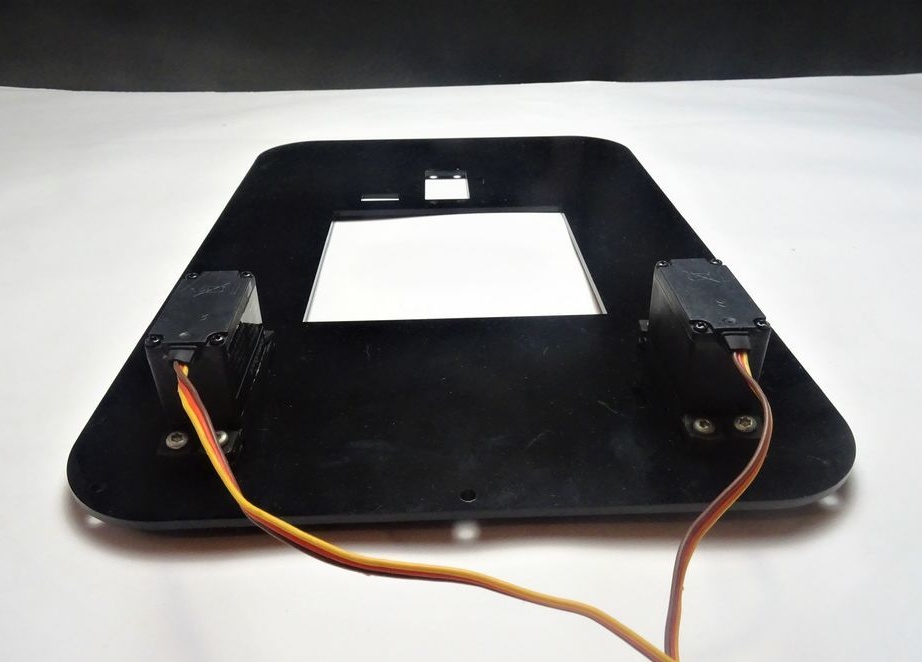
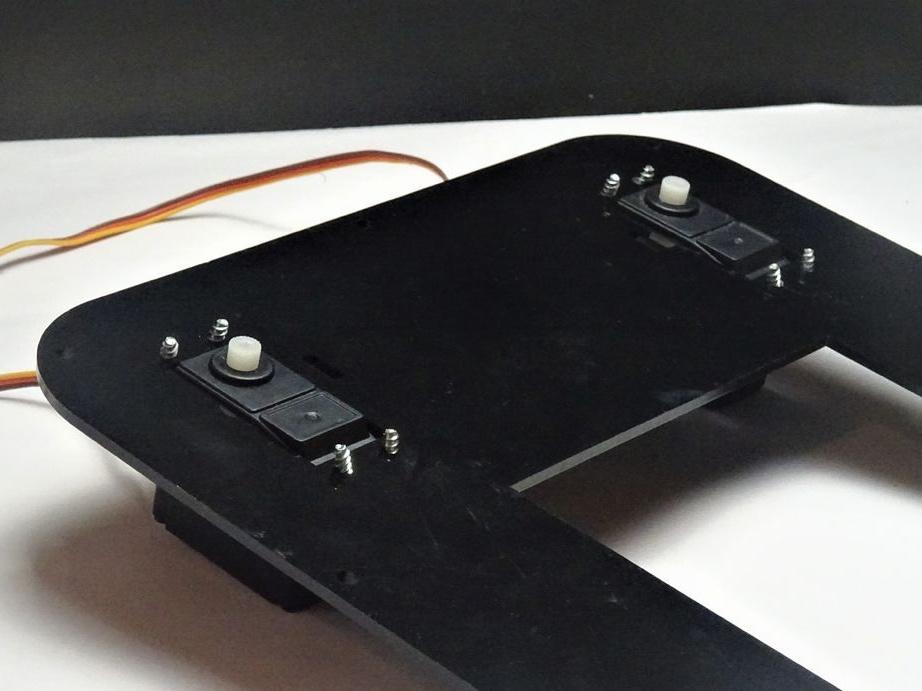
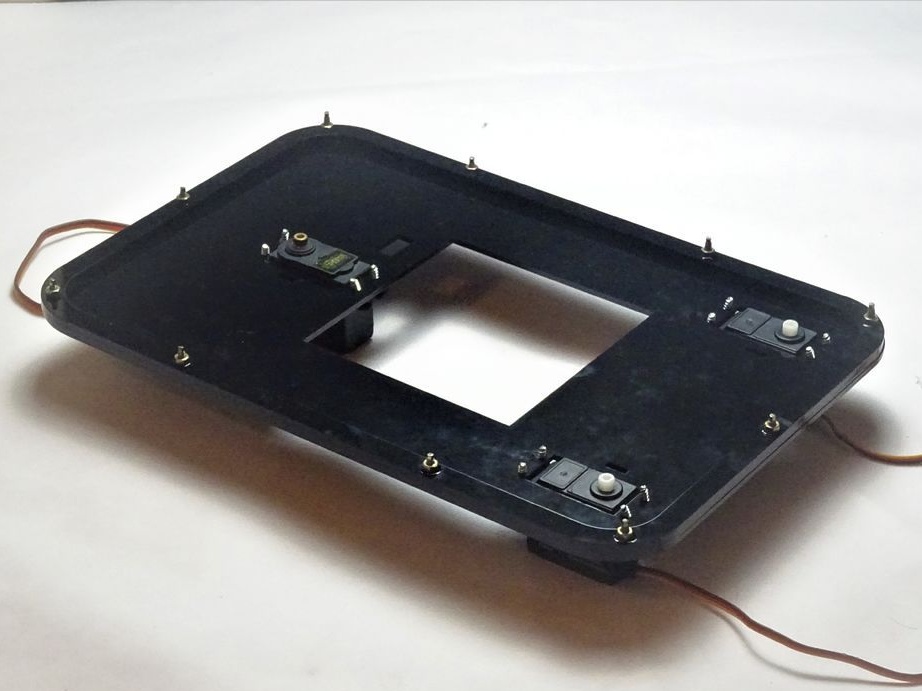
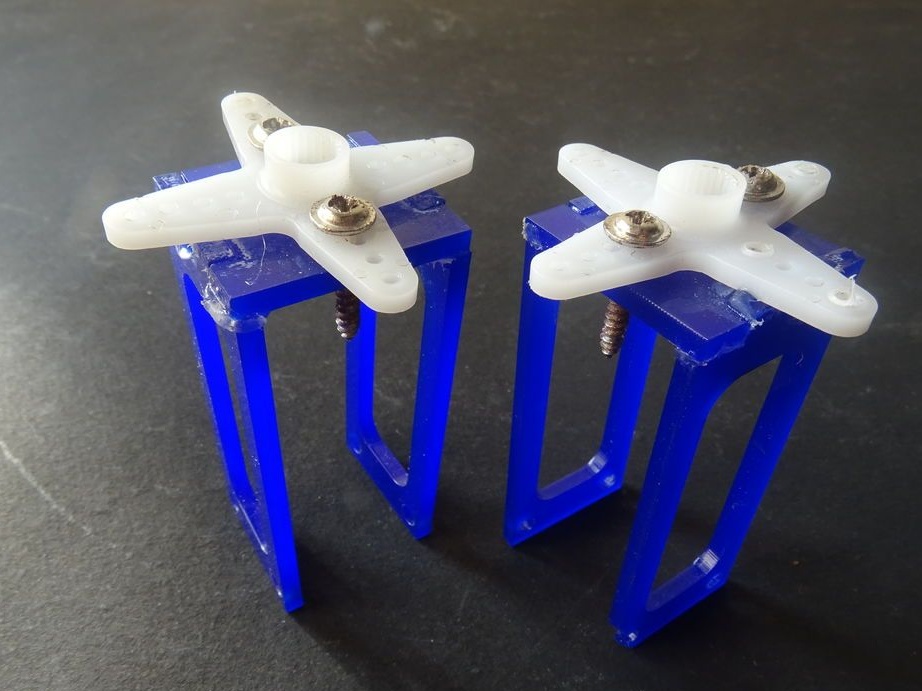
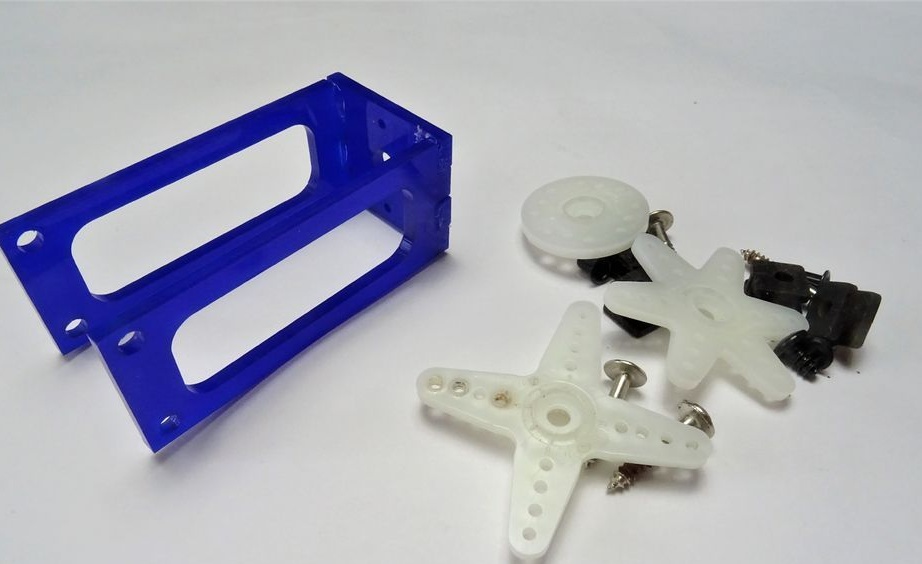
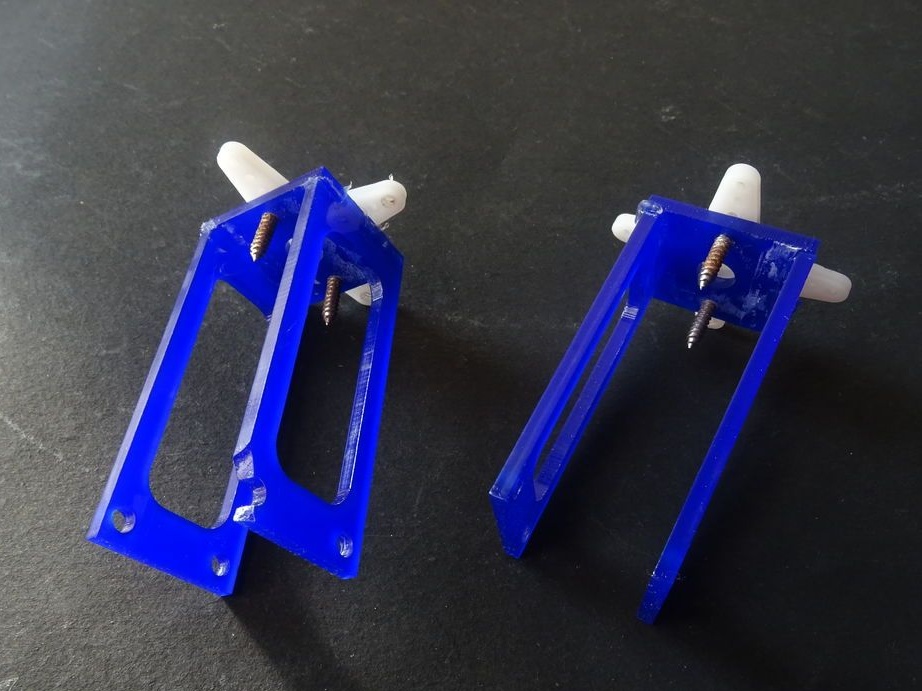
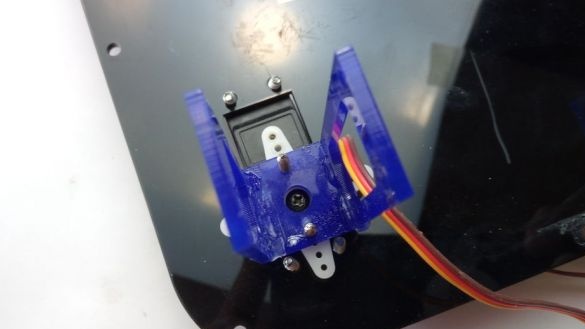
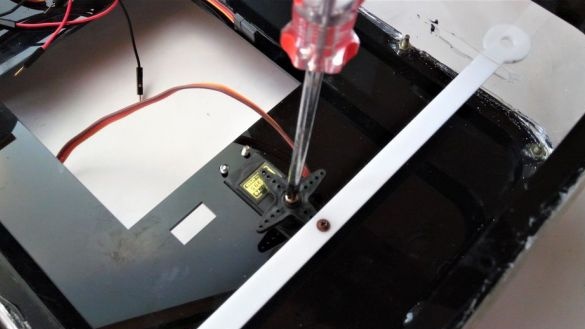
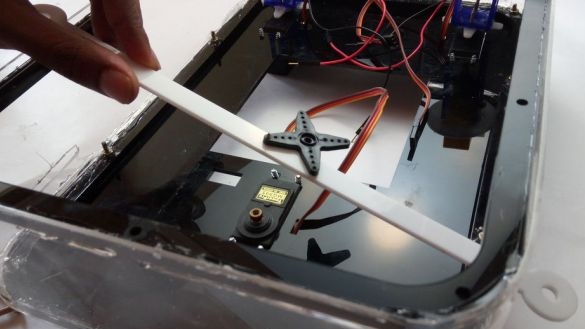
Etapa 3: Instalar servomotores
Todos os três servomotores estão parafusados na plataforma. Dois na parte de trás e um na frente.
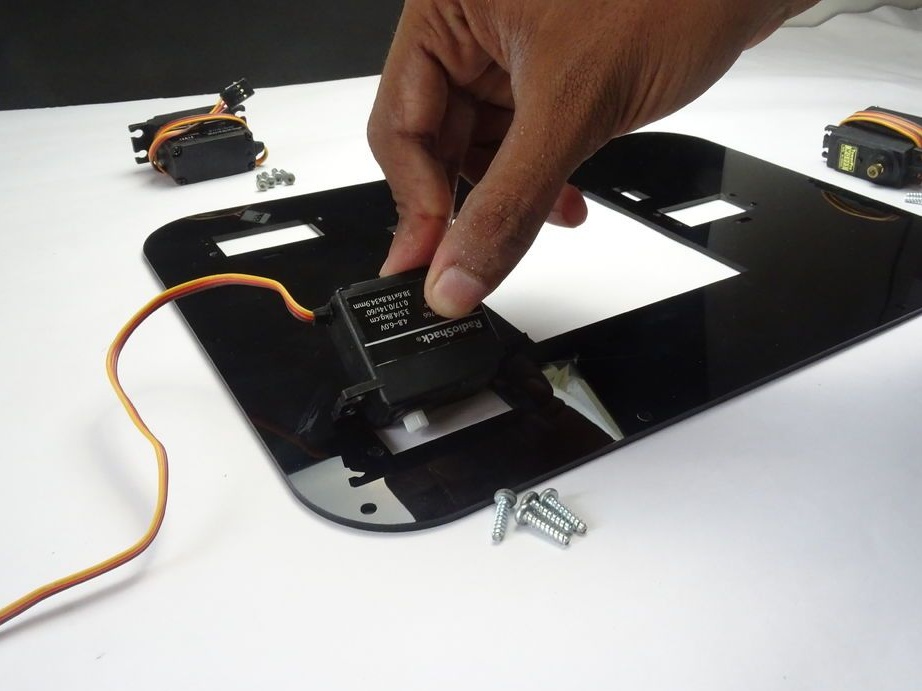

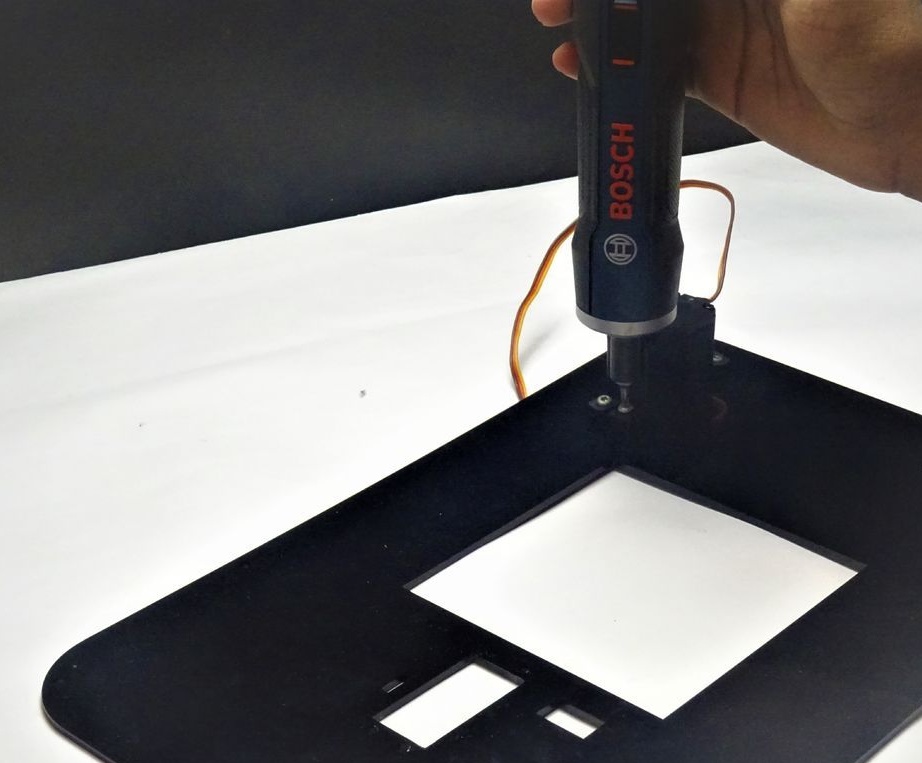
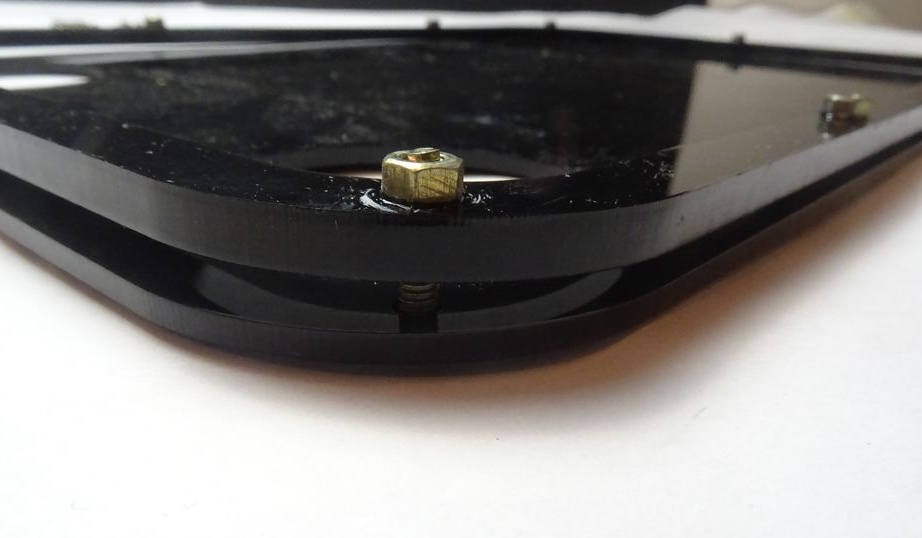
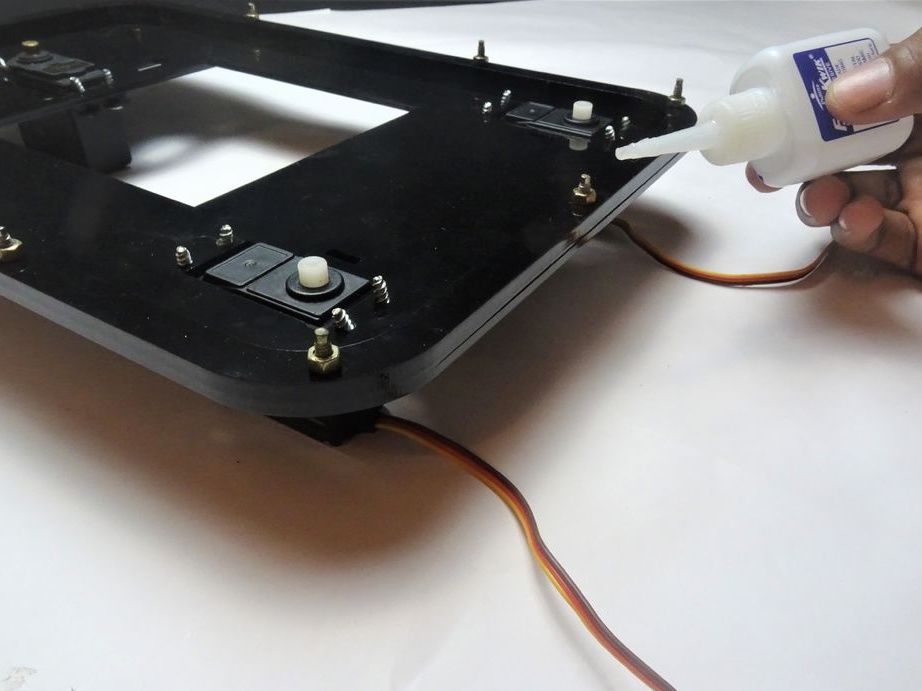
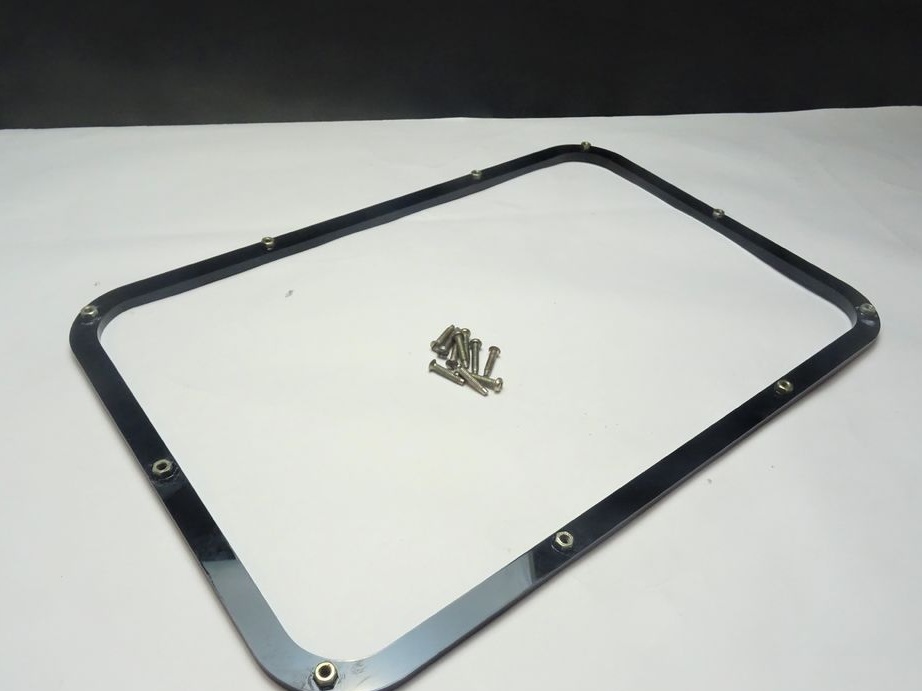
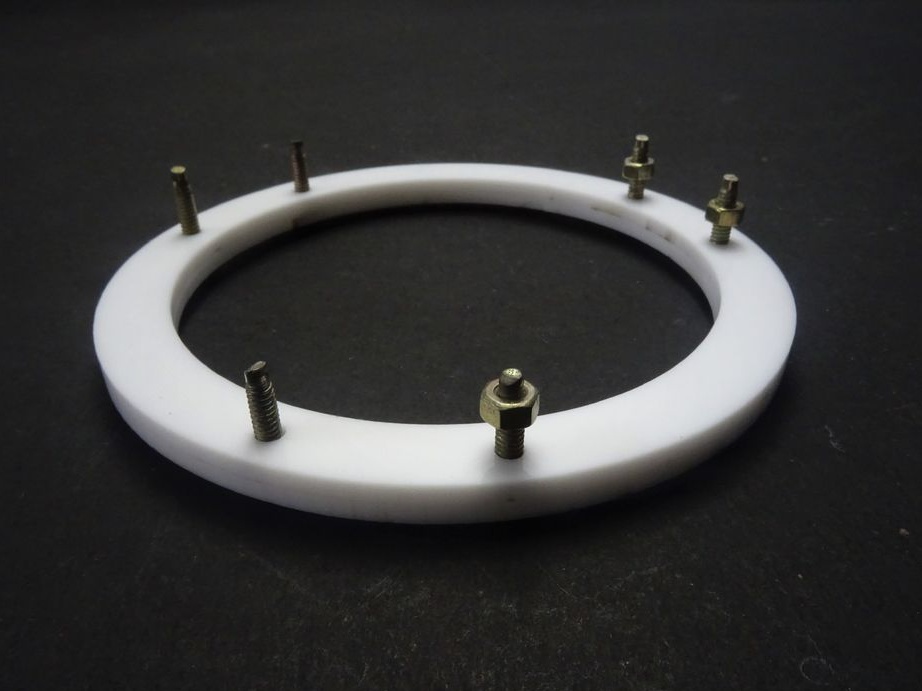
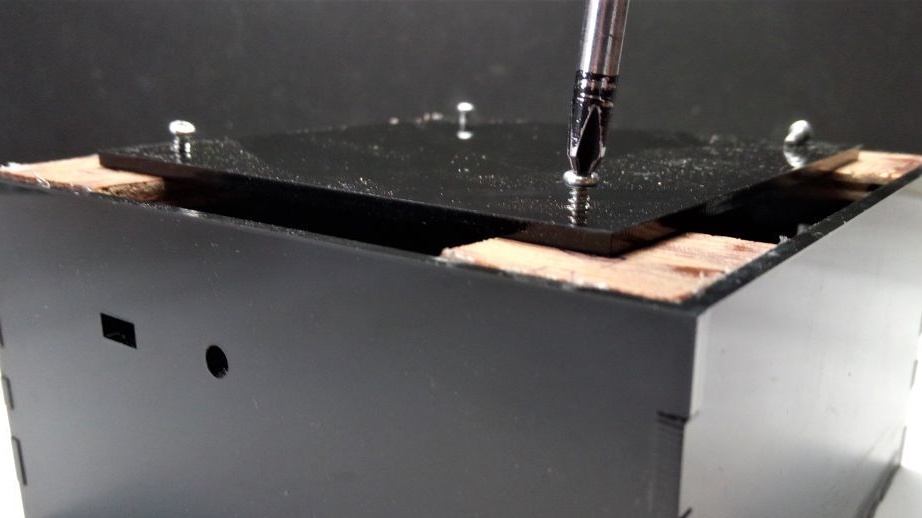
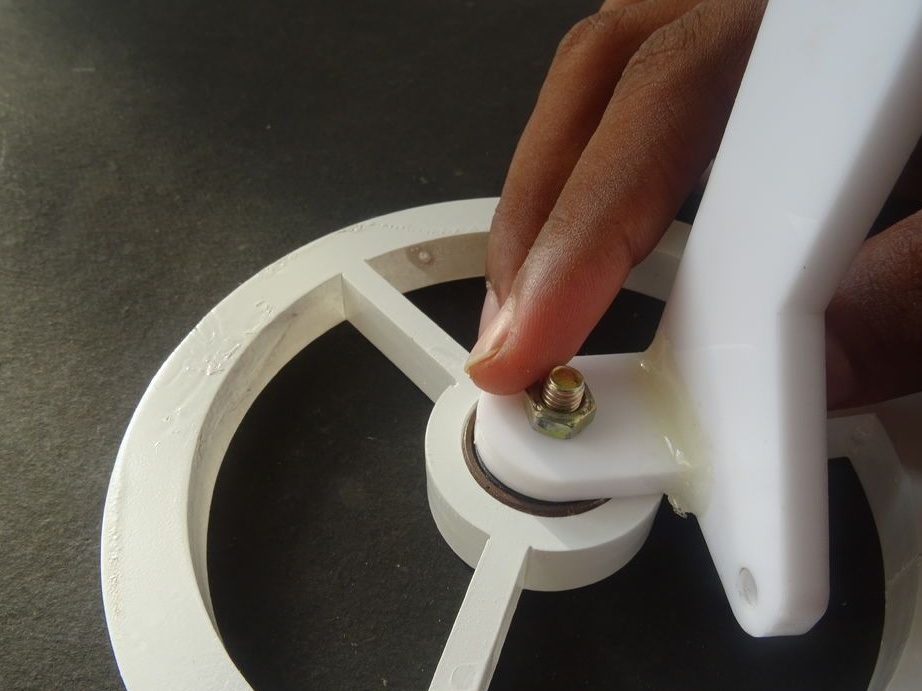
Etapa quatro: nozes
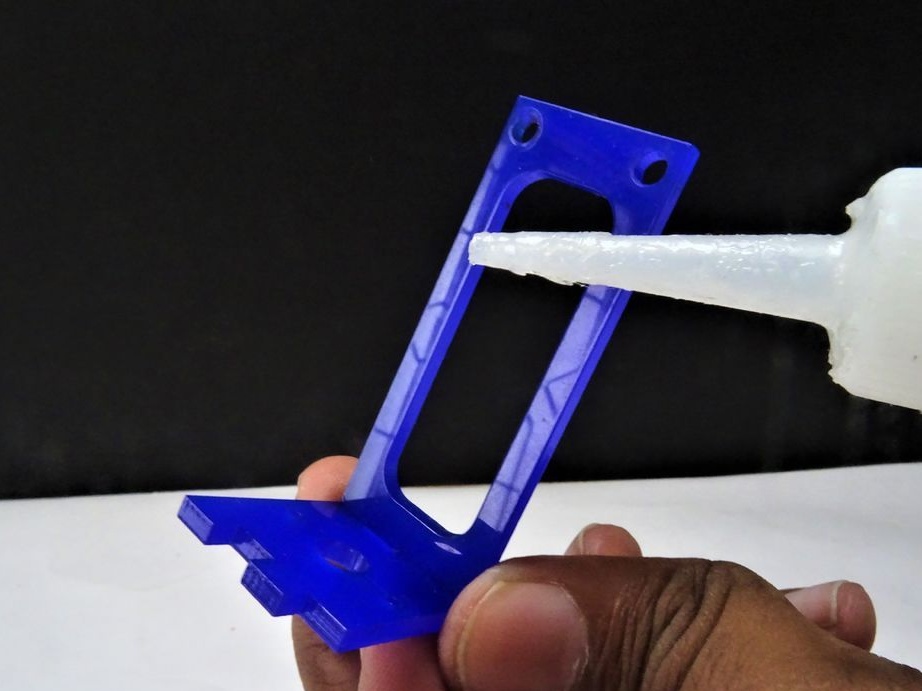
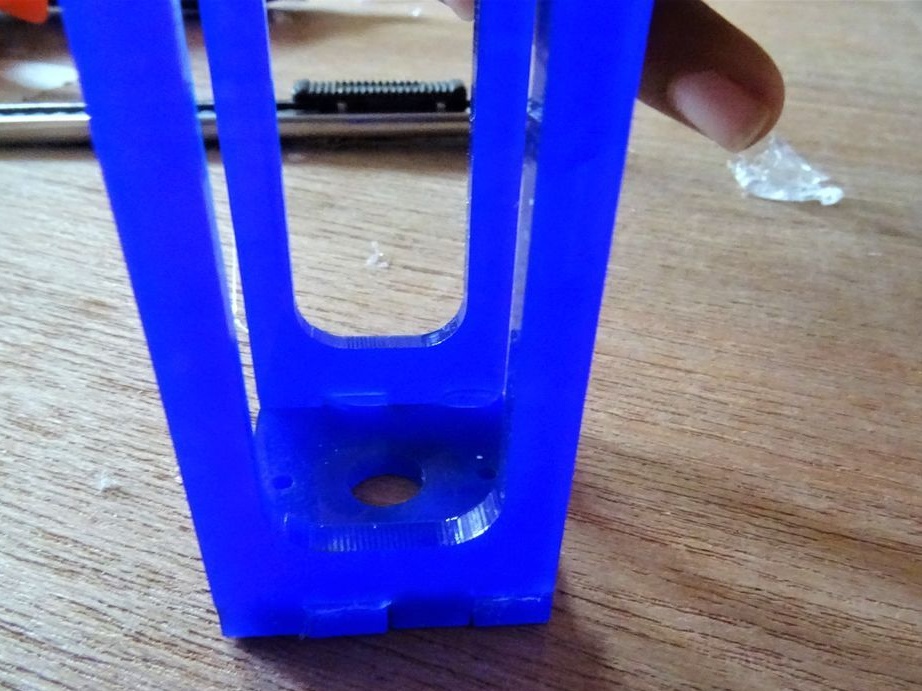
Para acesso aos mecanismos, as partes superior e inferior são aparafusadas. Cole as porcas da supercola na moldura e depois a reforce com cola Epoxy.


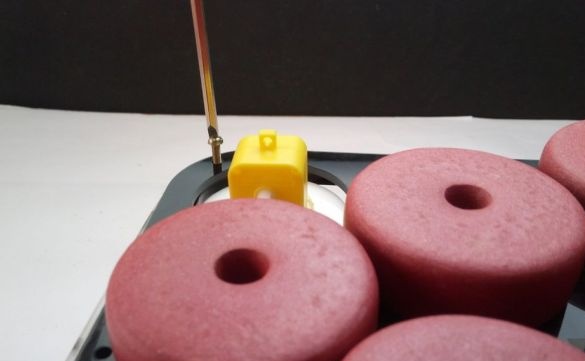
Quinto passo: carros alegóricos
Cola flutua.



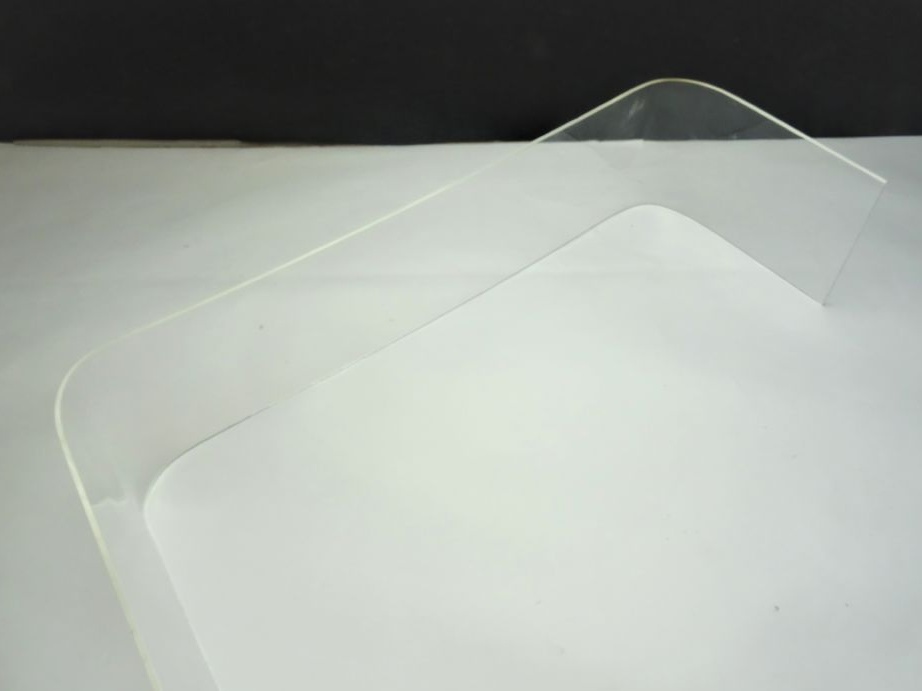
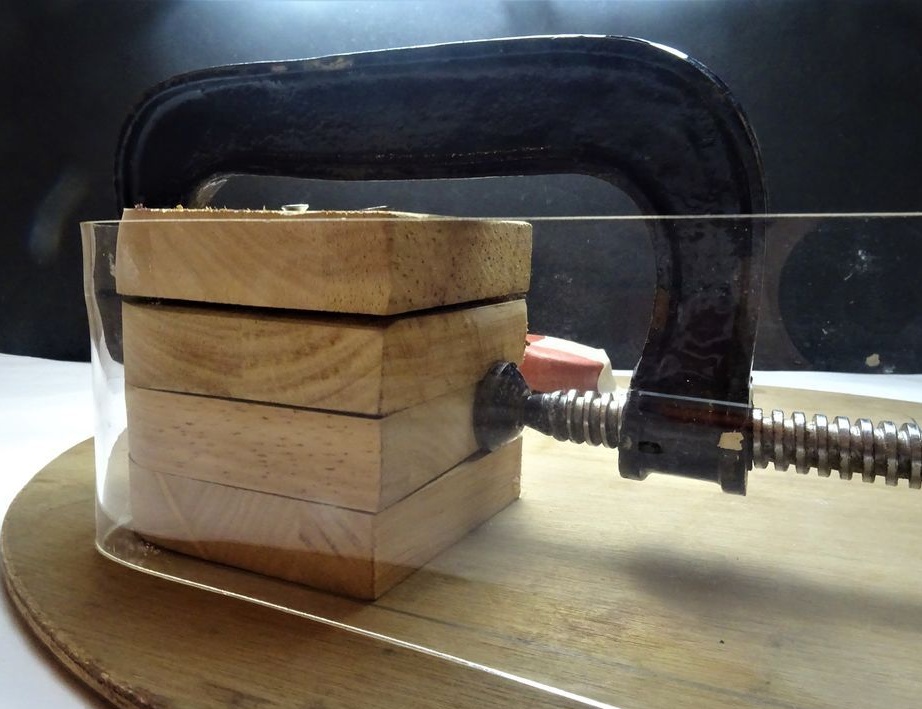
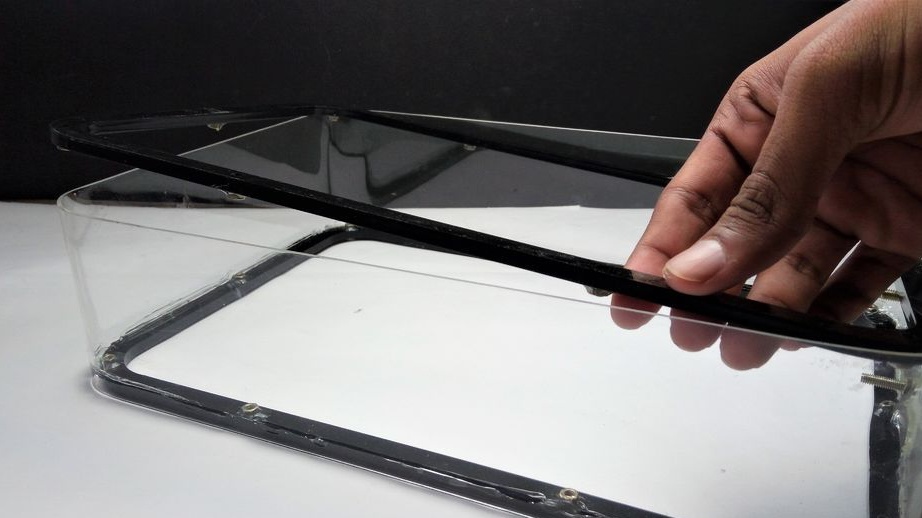
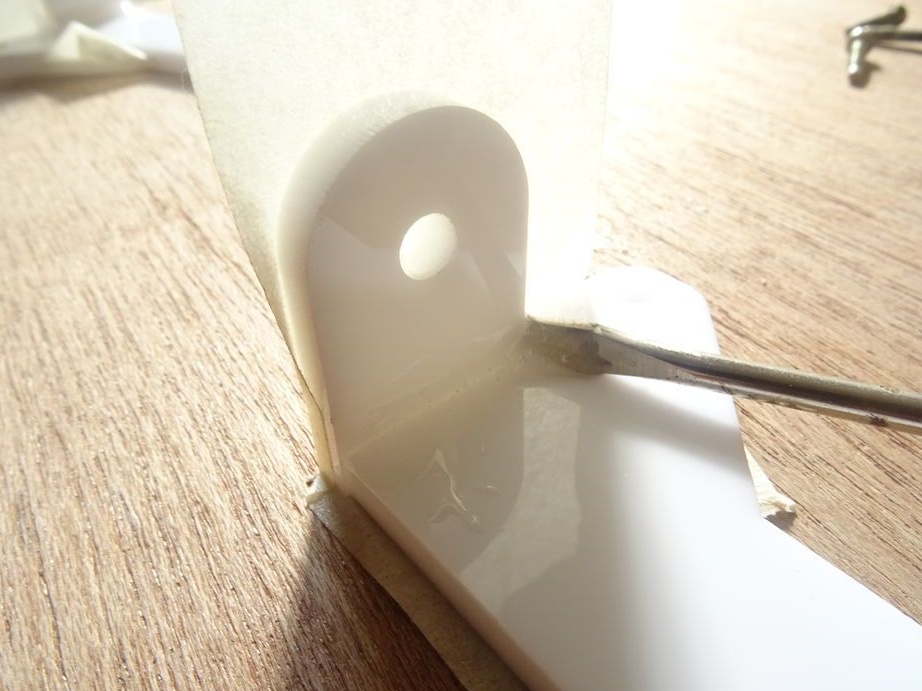
Etapa seis: moldar o acrílico
Para dobrar acrílico, um artesão faz um modelo de madeira.



Ele prende a peça com uma pinça e, aquecendo-a com um secador de cabelo, confere à peça a forma desejada.





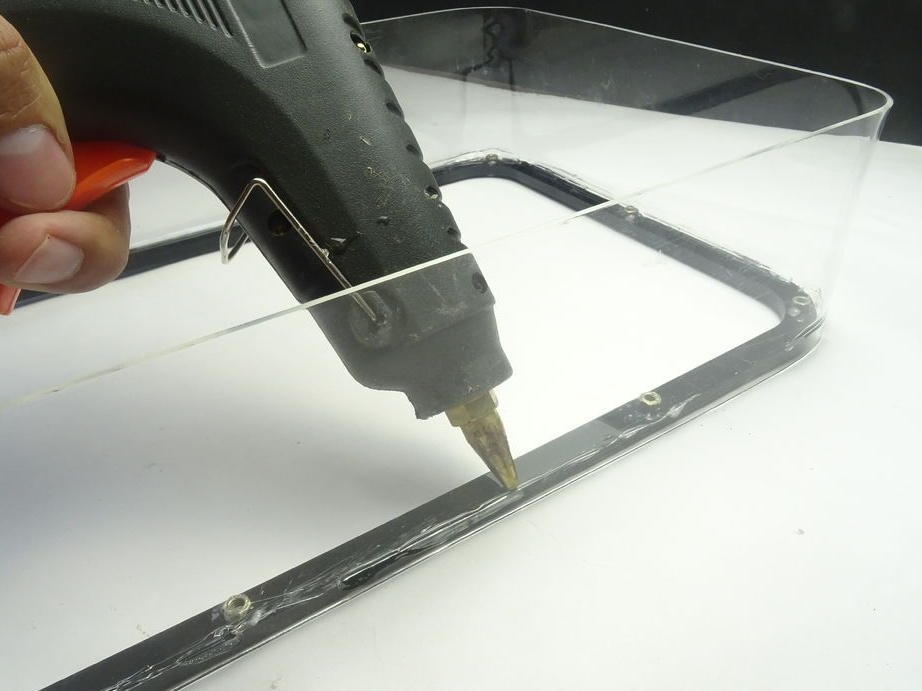
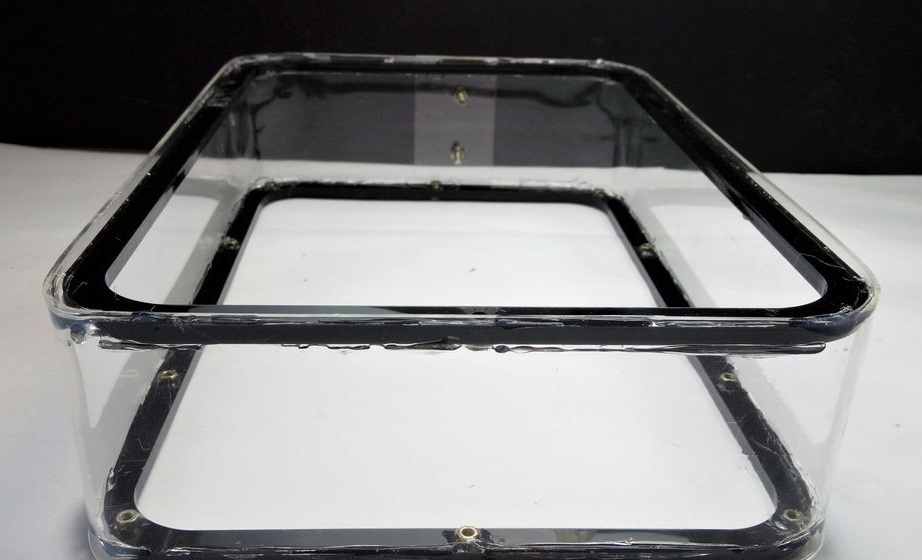
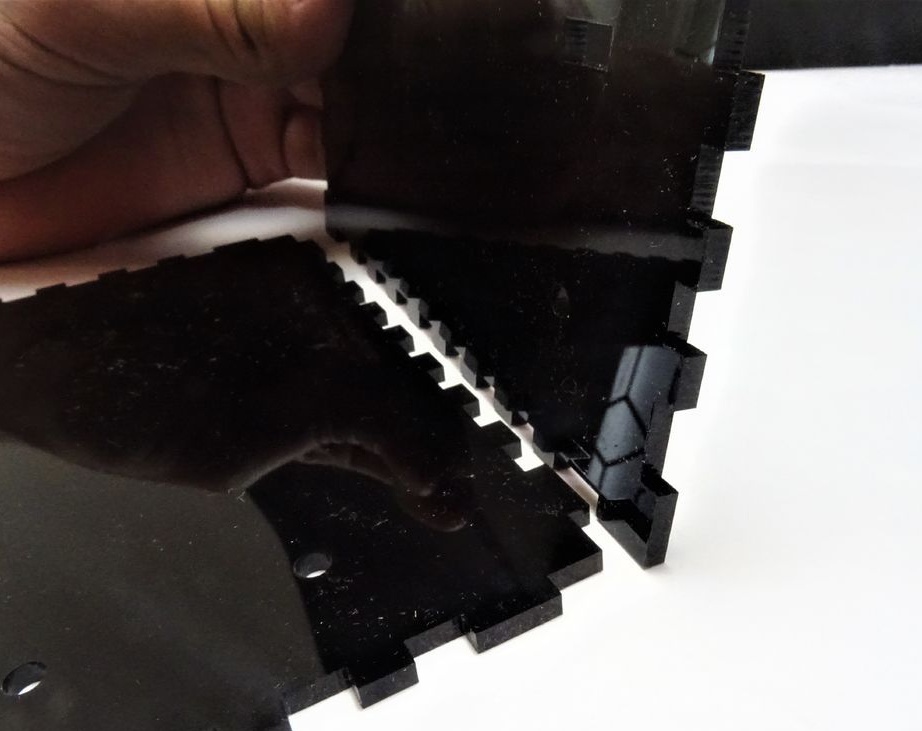
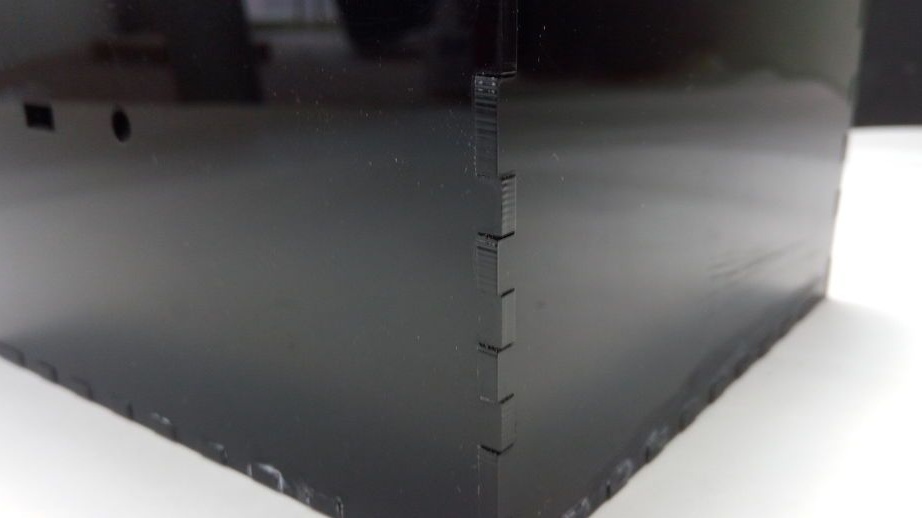
Sétimo passo: estrutura
Cola as armações superior e inferior no corpo transparente. As costuras são cuidadosamente seladas com cola quente.







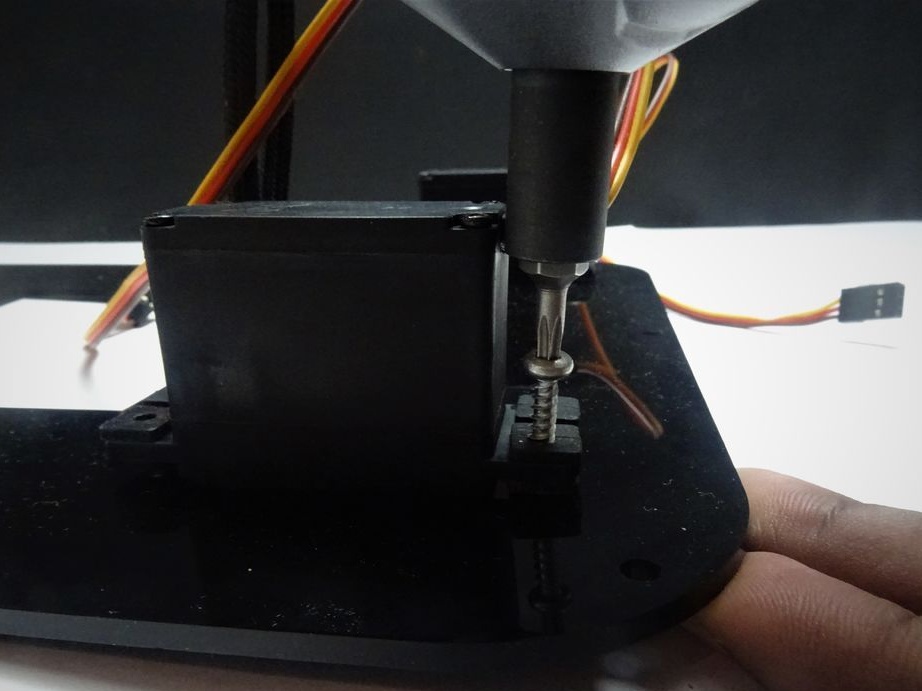
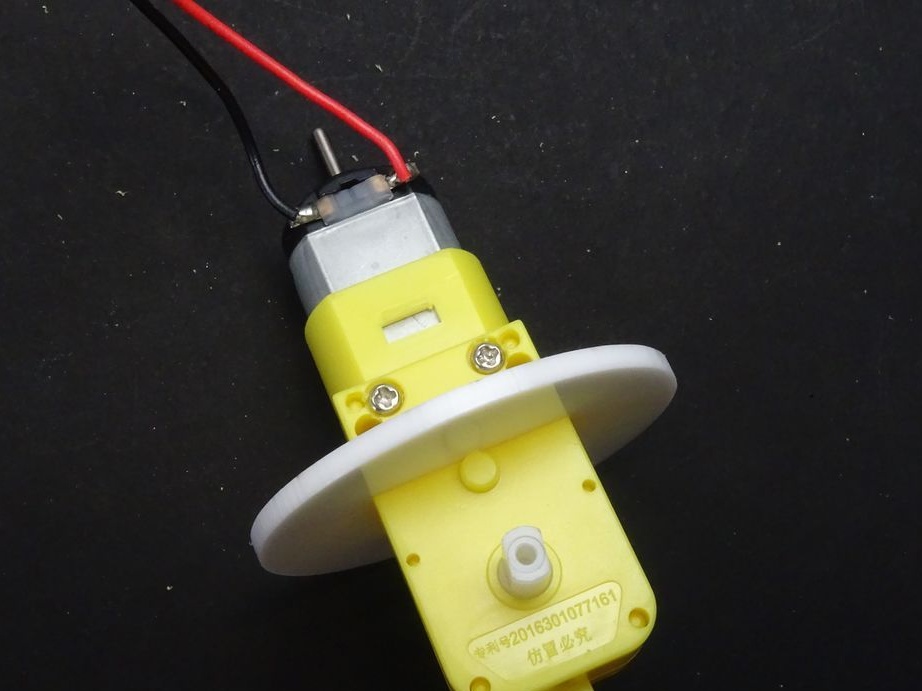
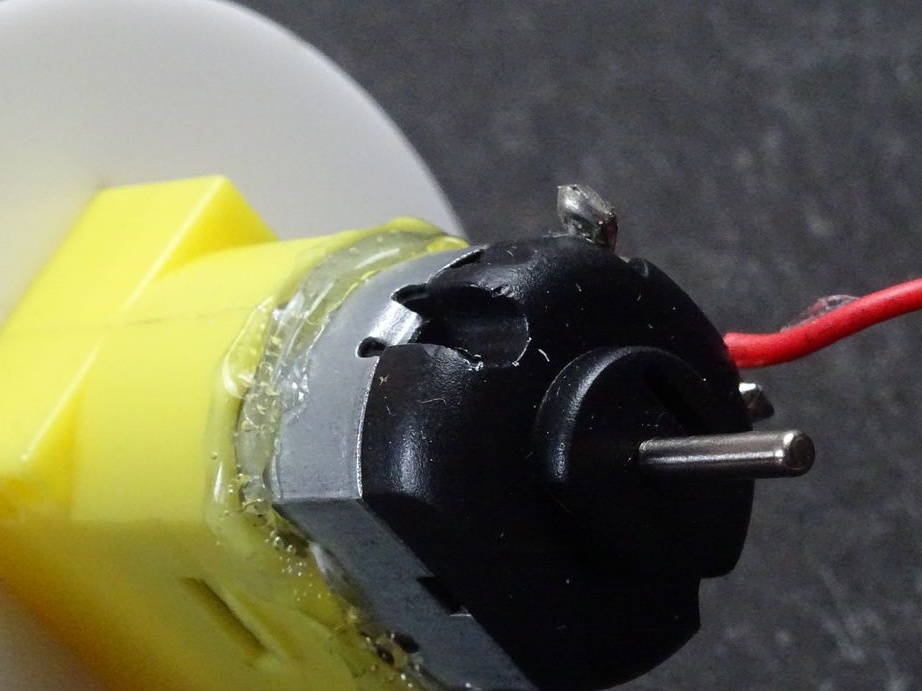
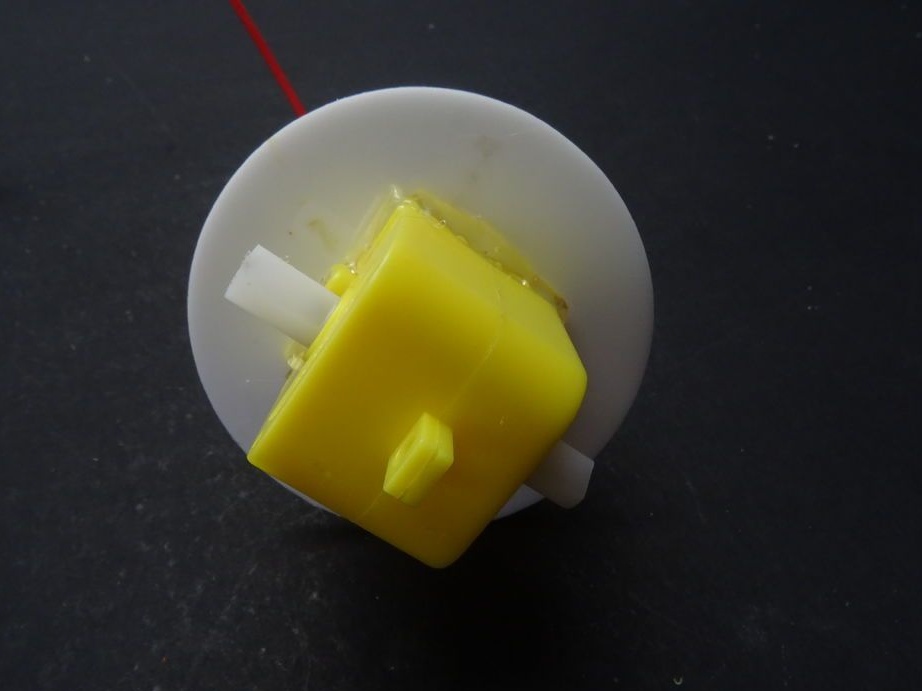
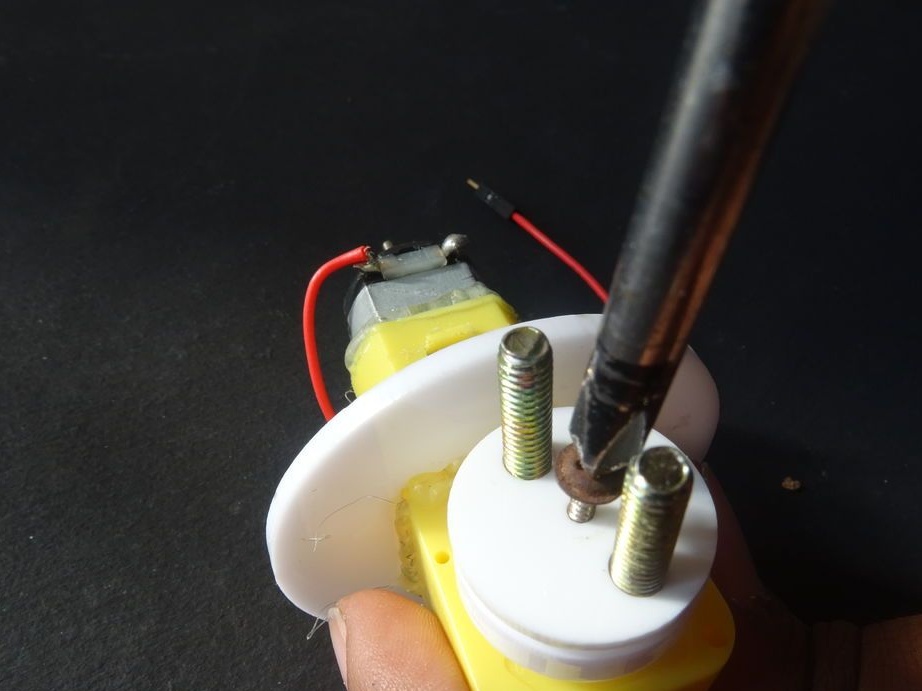
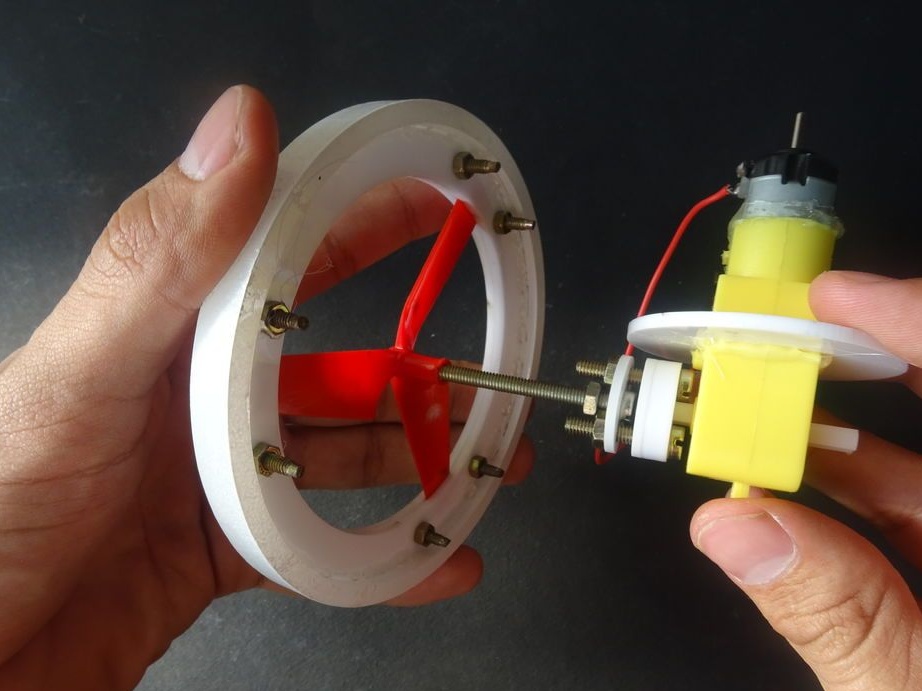
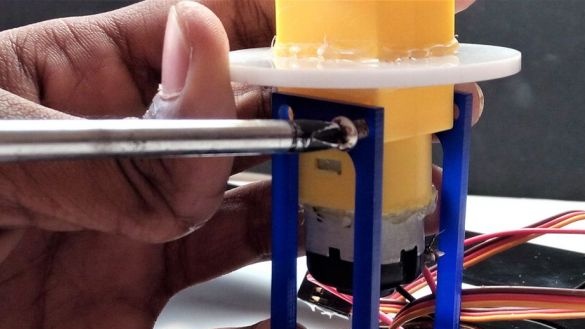
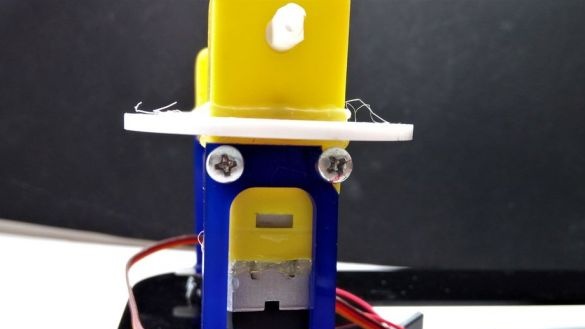
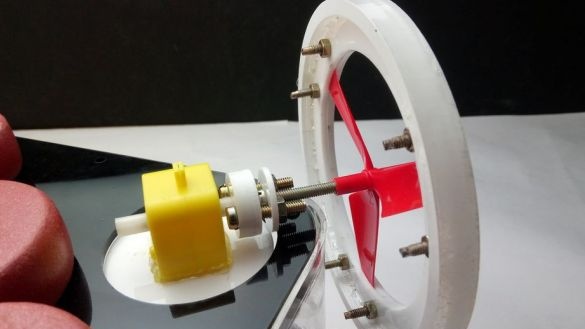
Etapa Oito: Ajuste do Motor
Agora você precisa processar a carcaça do motor para instalar peças nela.
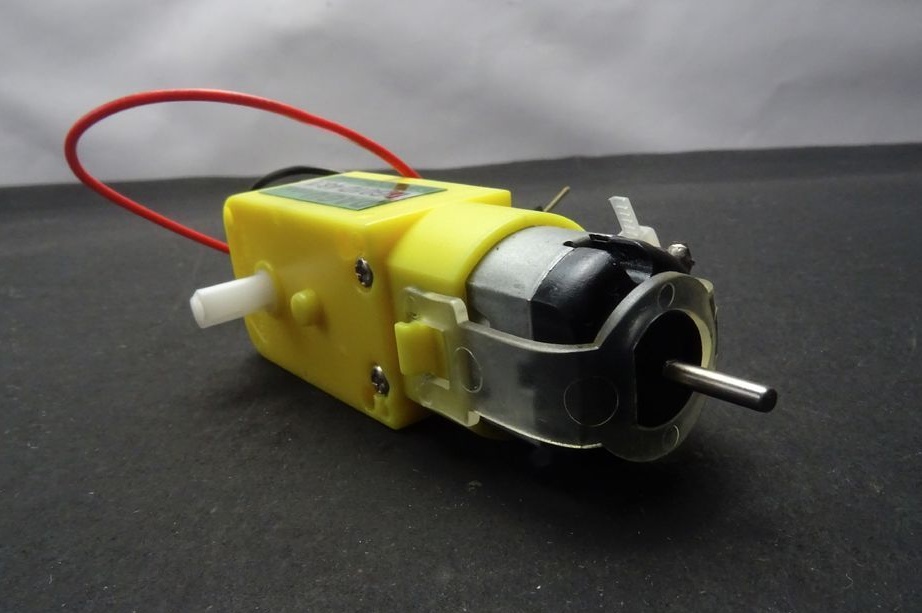
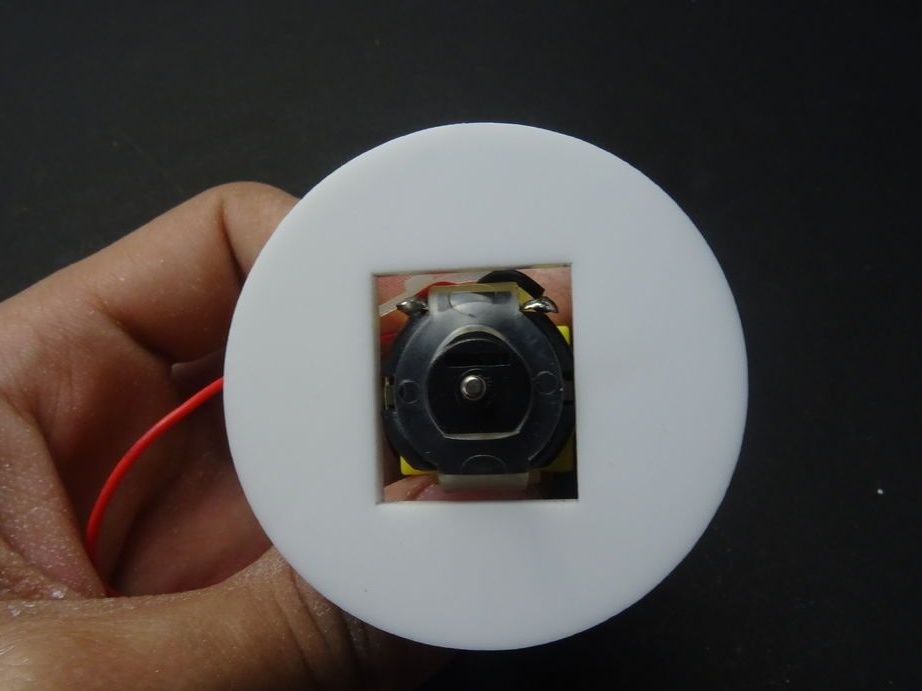

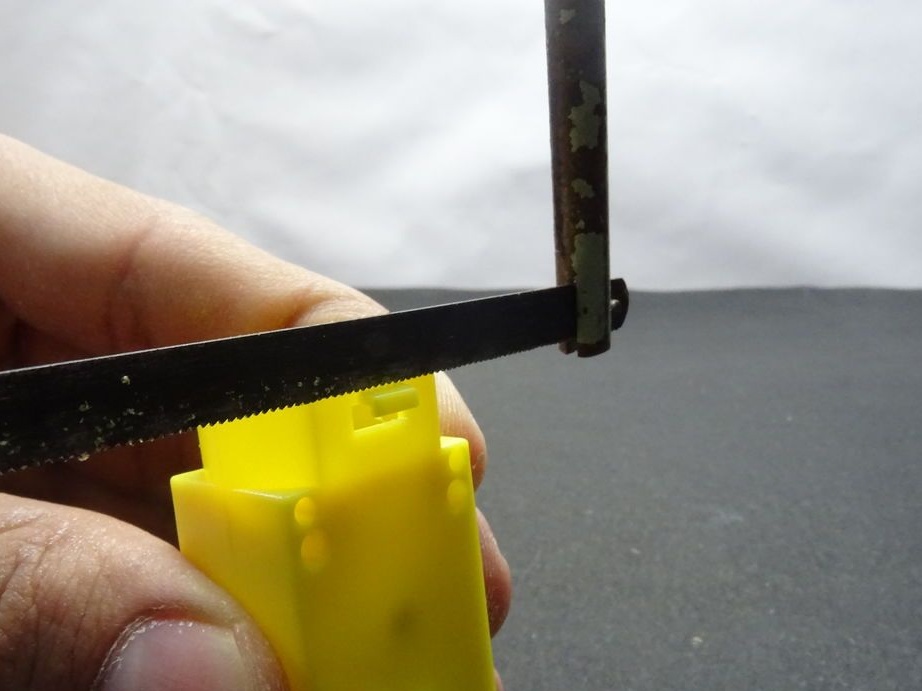
Corta todas as partes salientes do corpo, até o adesivo.
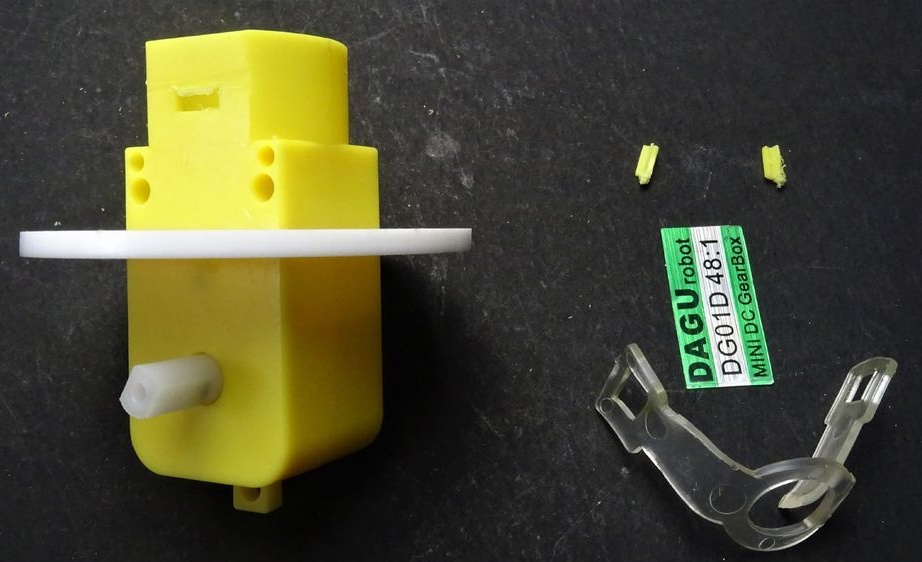

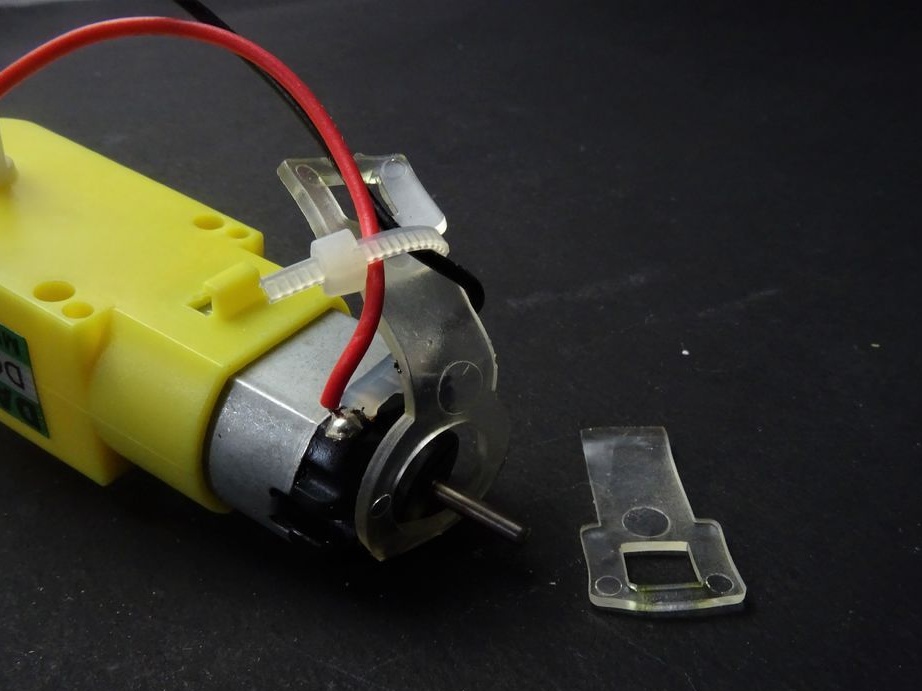


Instala a peça no corpo e cola. Como era necessário cortar o suporte do motor (travas), o motor também se fixa com cola.

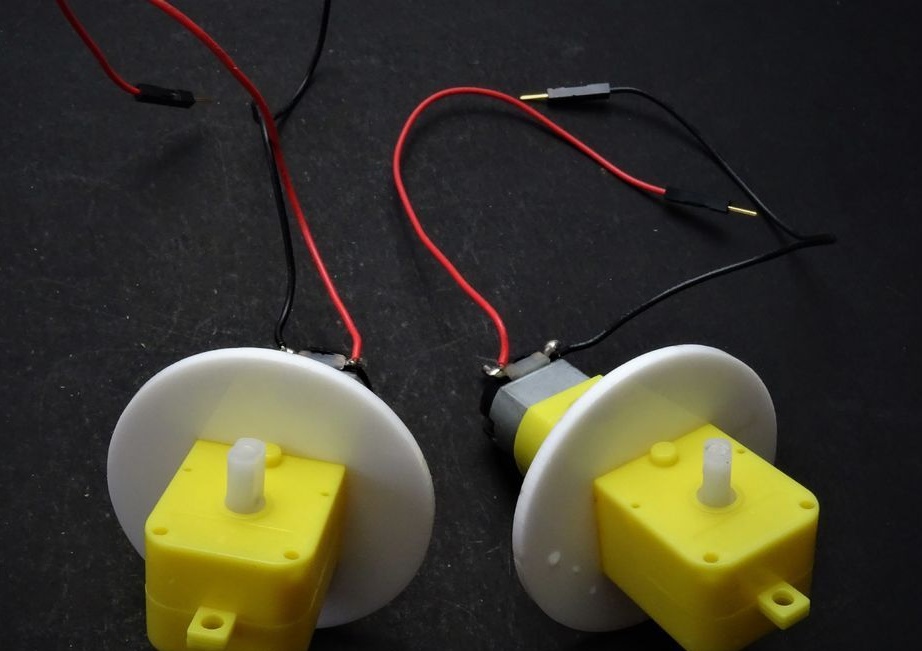

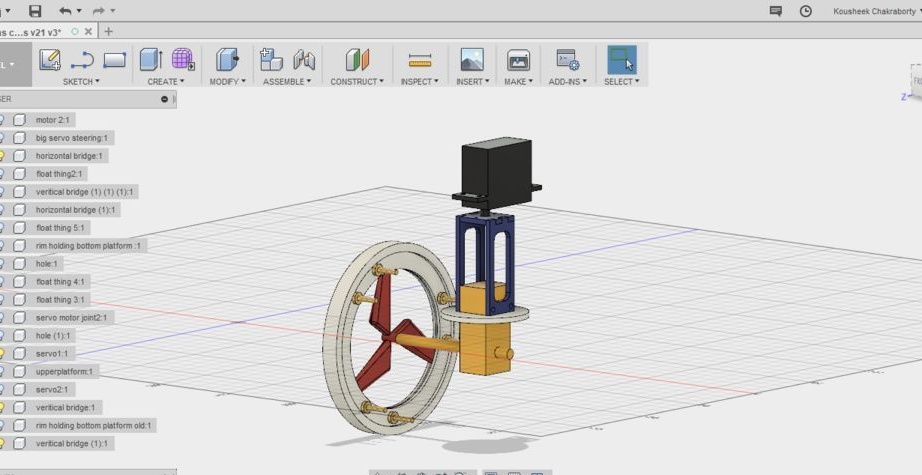
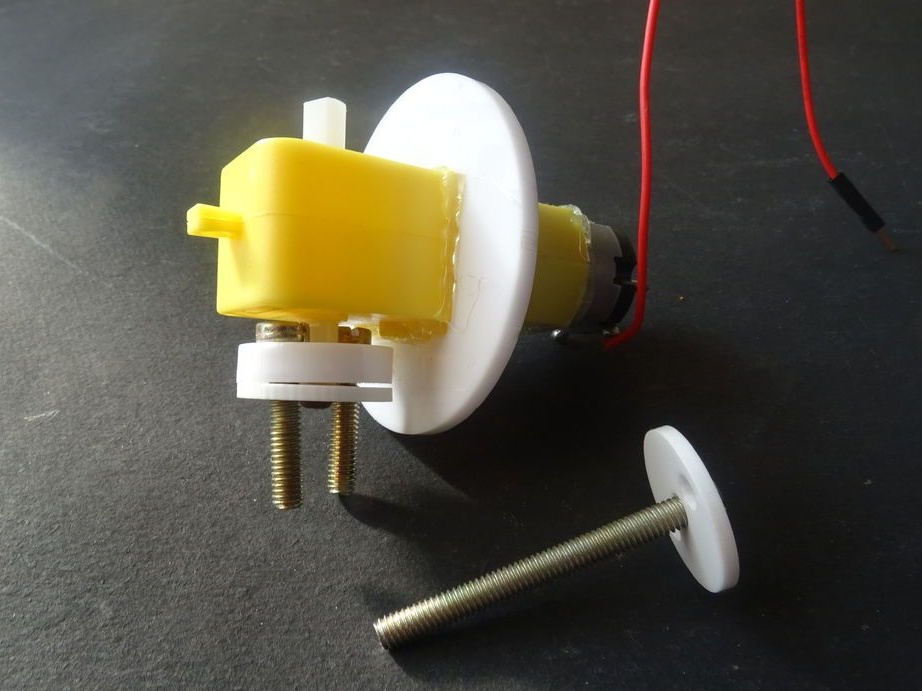
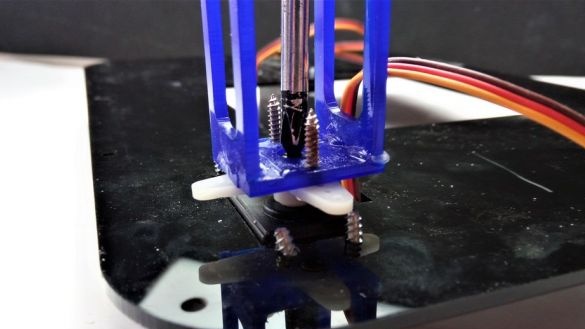
Etapa nove: mecanismo giratório
Monta um alojamento rotativo. Um motor será instalado nele e ele será conectado ao servoconversor.
Cola o estojo.

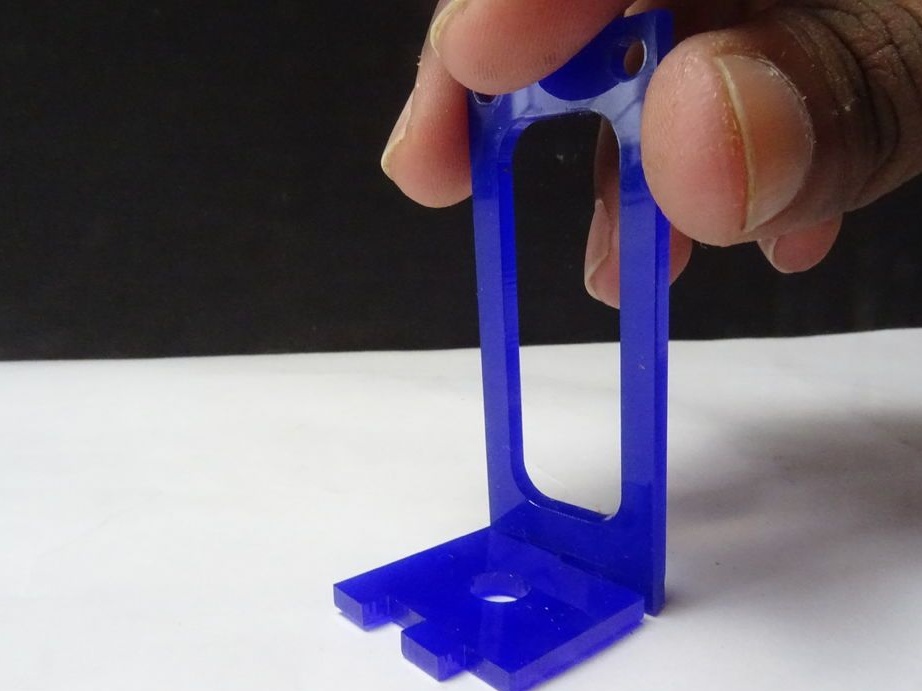

Parafusos no acoplador.


Passo Dez: Pintura
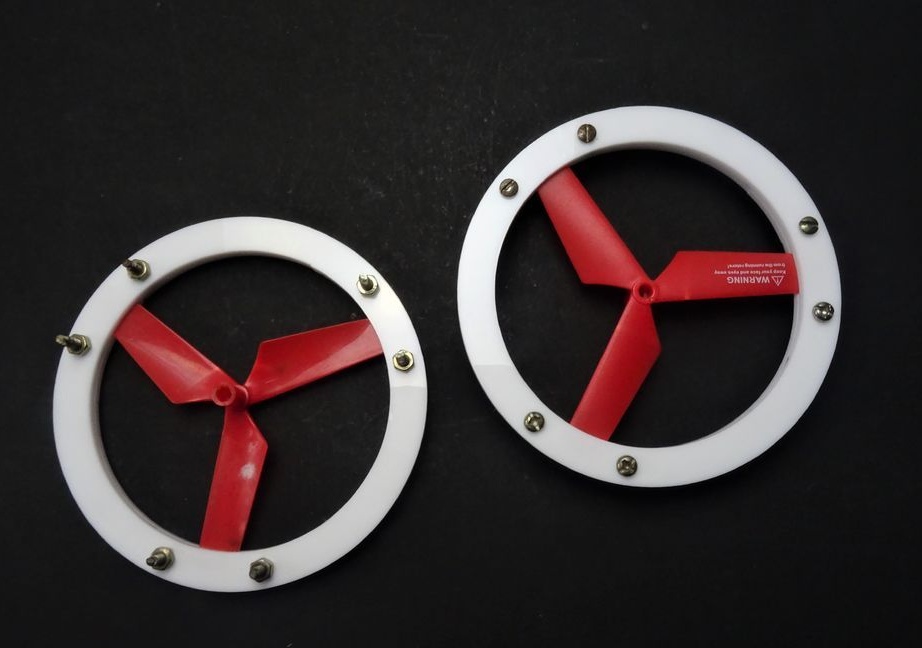
Como o mestre não tinha acrílico branco com a espessura necessária, as rodas e o aro foram recortados em acrílico transparente e depois pintados de branco.




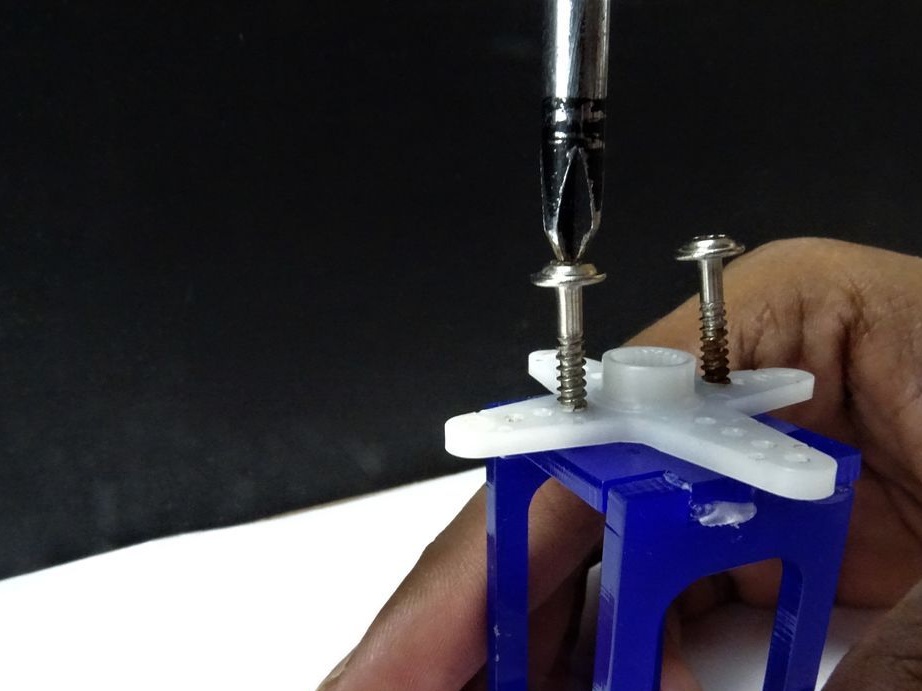
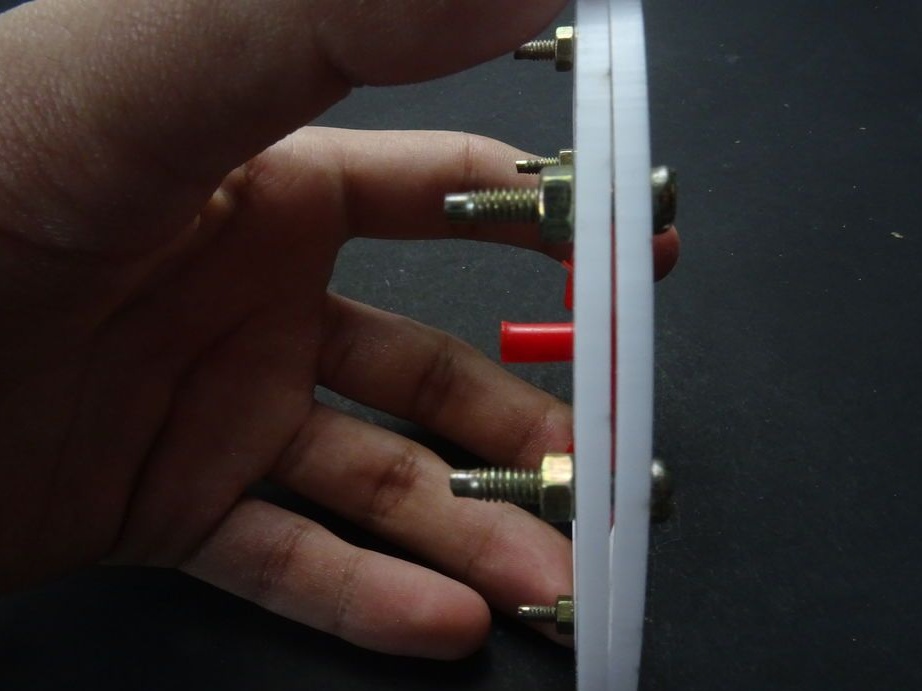
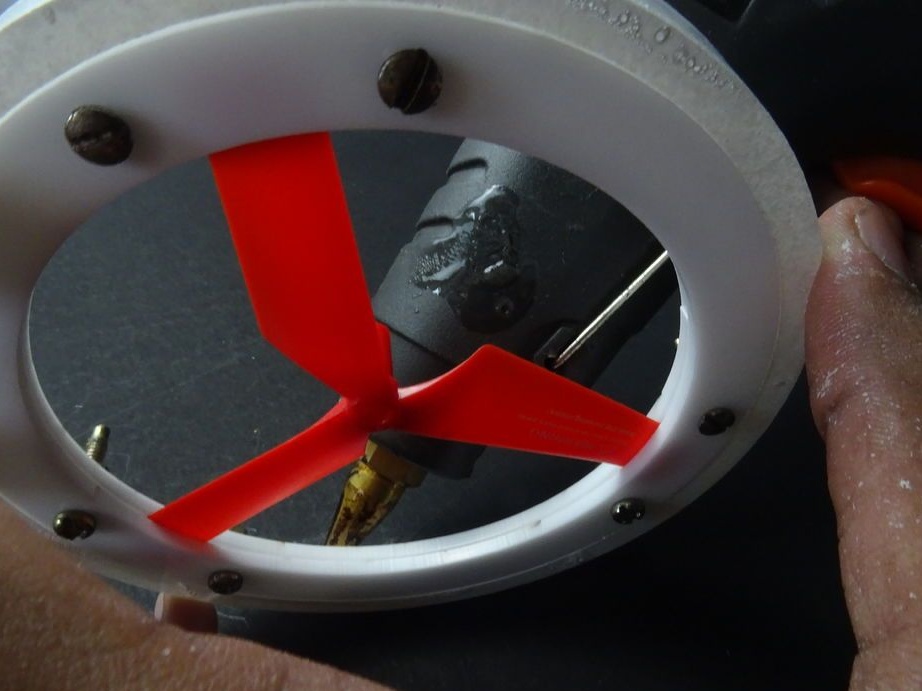
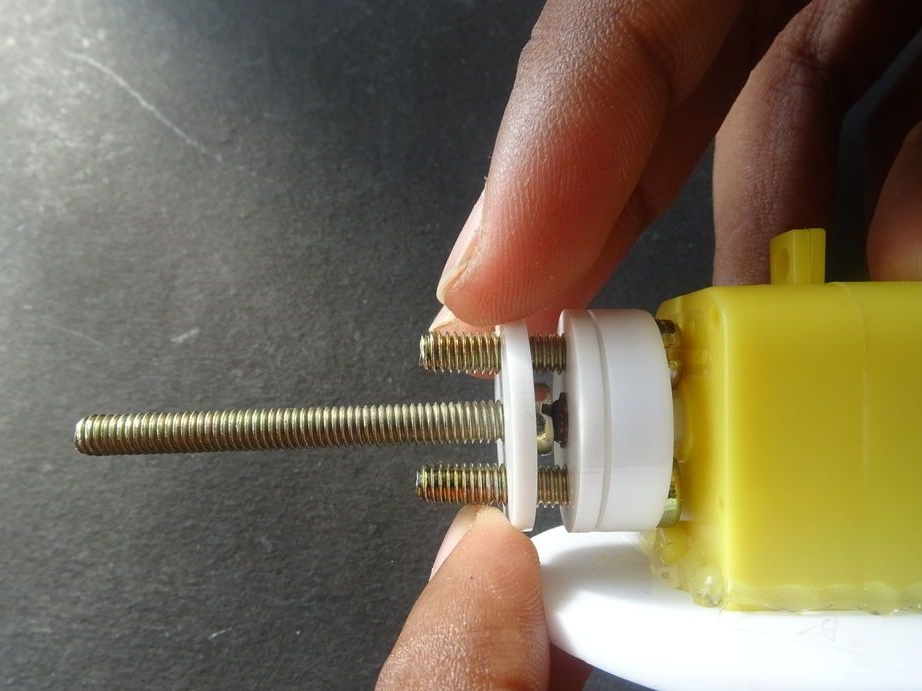
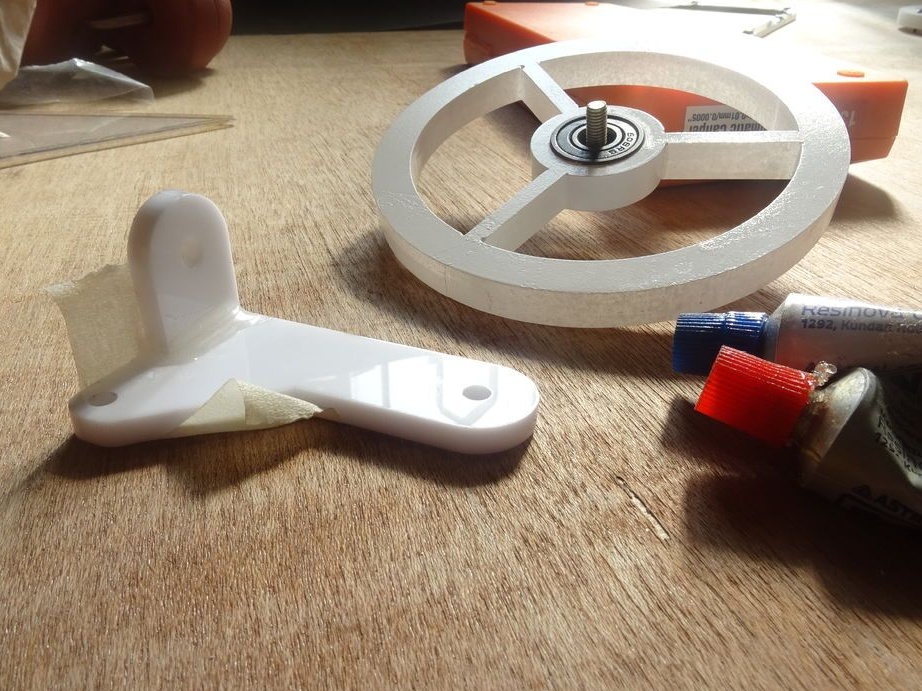
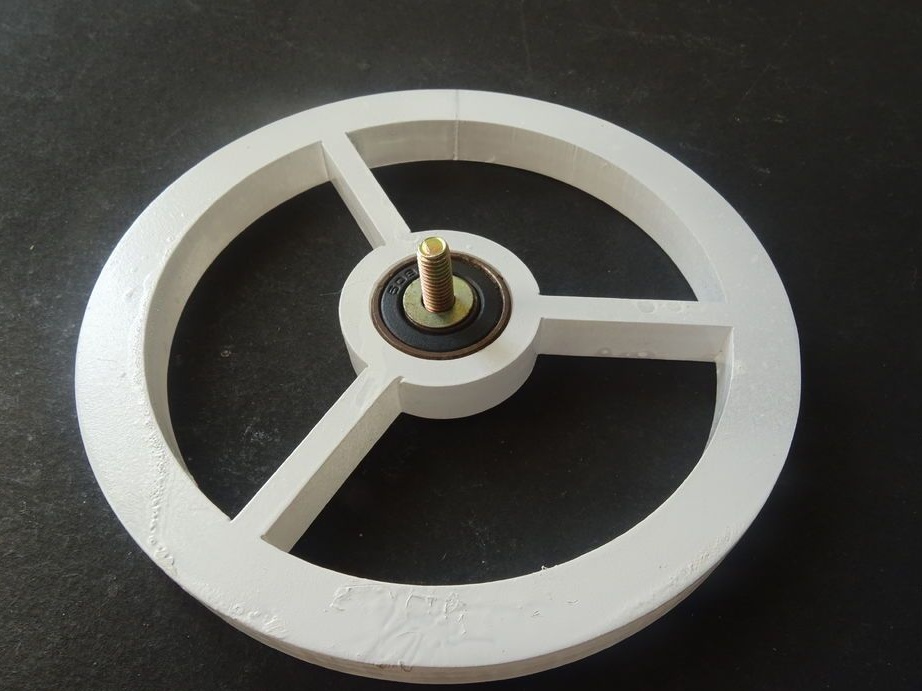
Etapa Onze: Montagem da Roda
Nos parafusos recolhe duas jantes. Os parafusos não estão totalmente apertados.




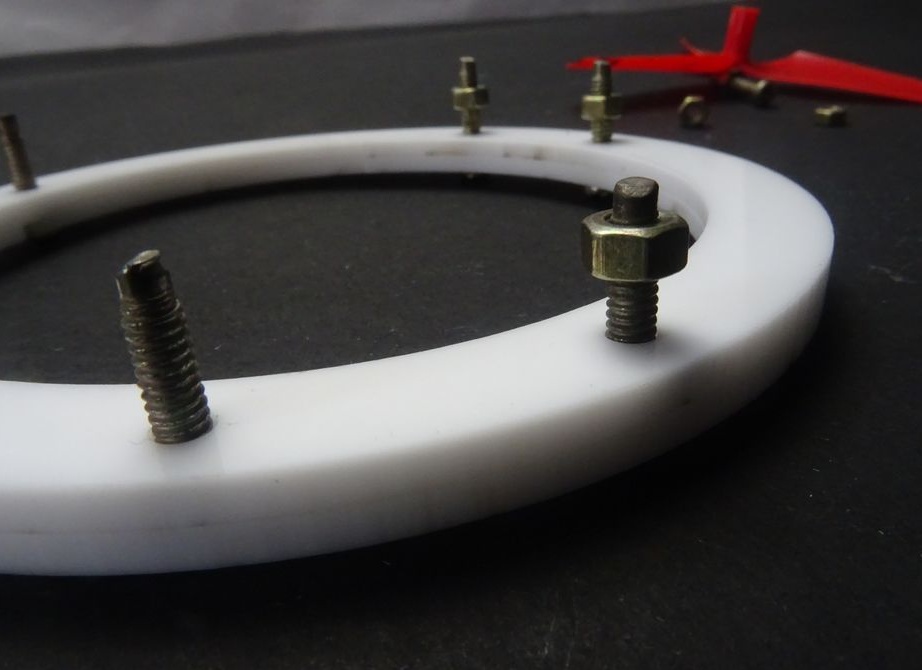
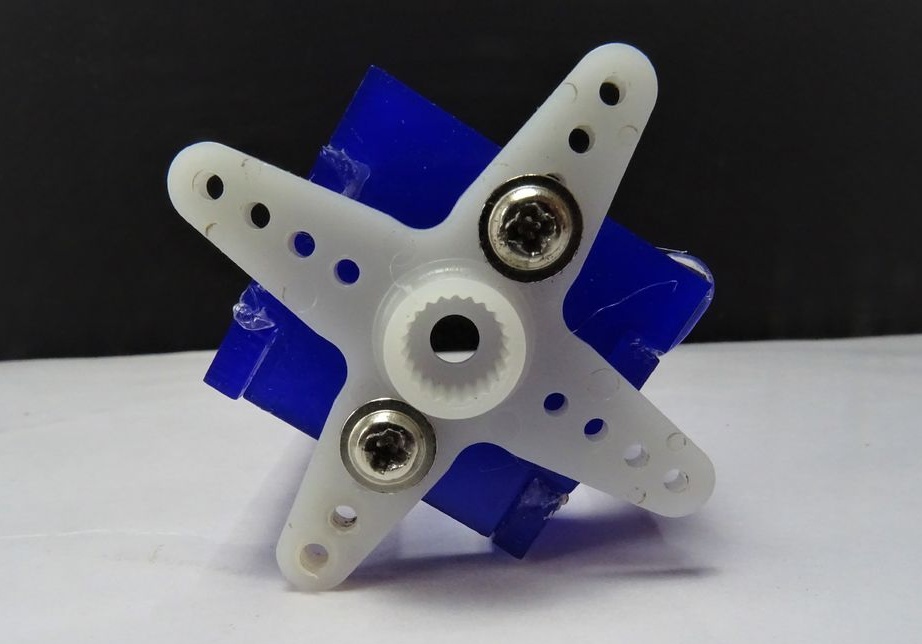
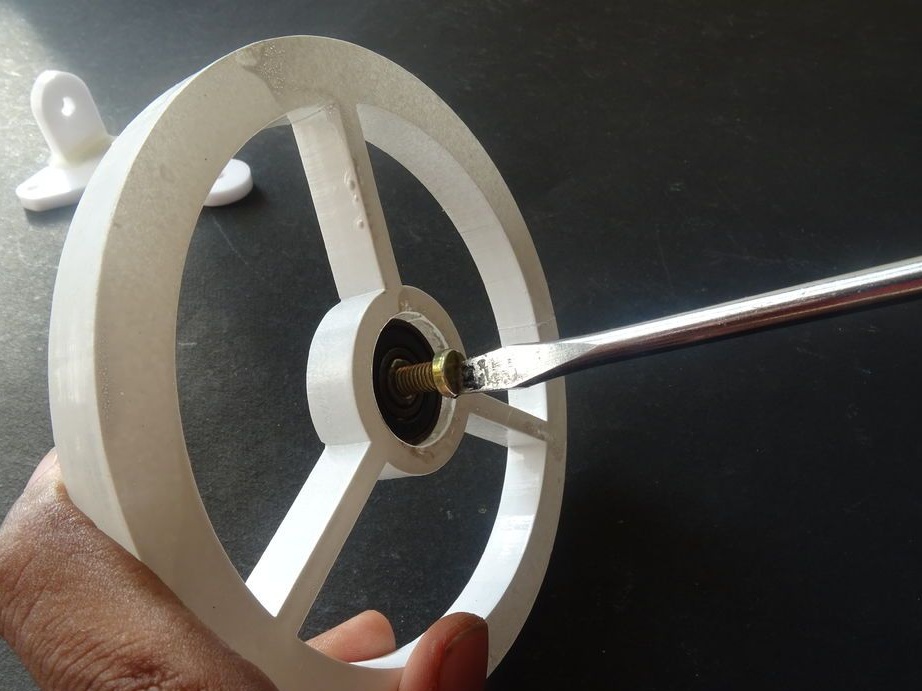
Entre os discos, instala os parafusos e os aperta. Ao instalar o parafuso, você deve usar o modelo para centralizá-lo.
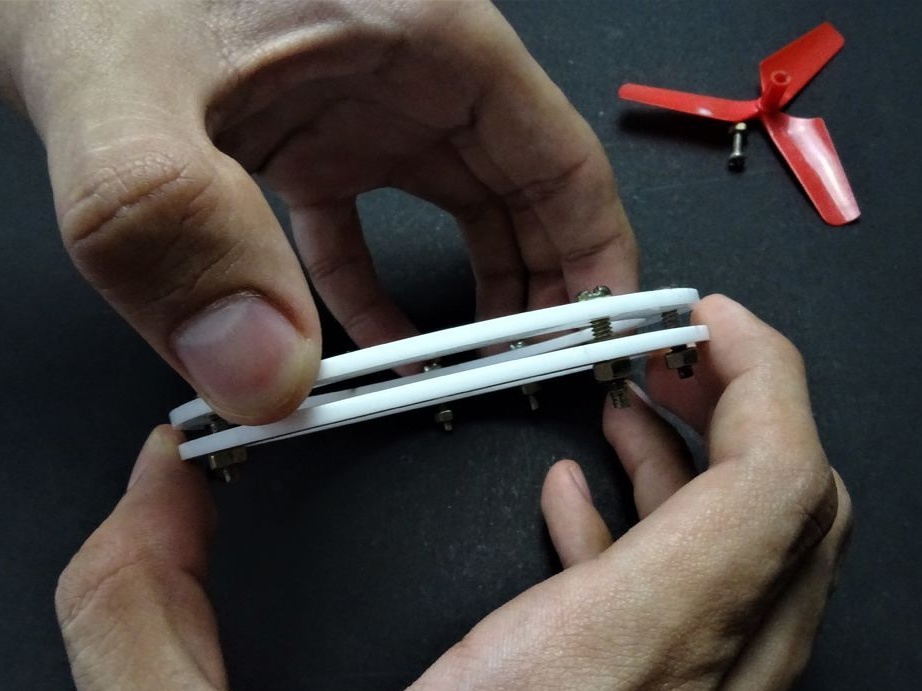
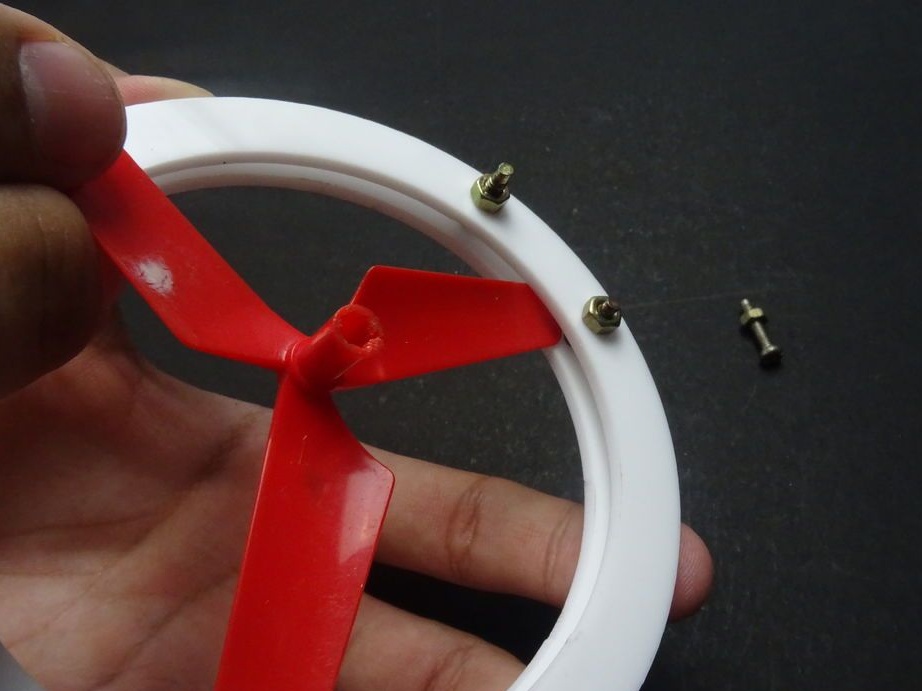
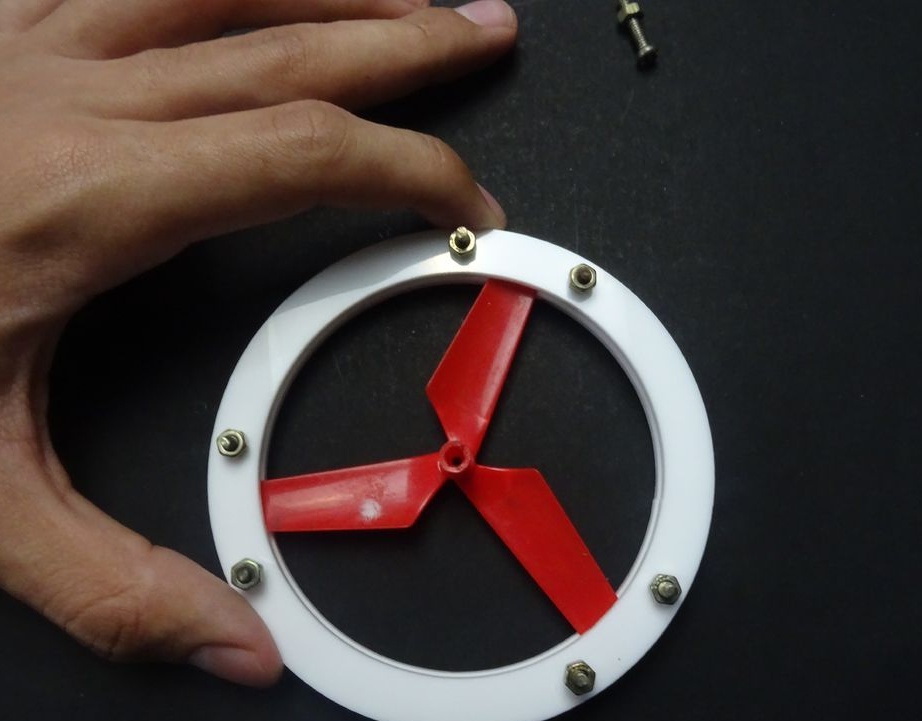

Define a borda externa da roda. O aro deve estar nivelado com o disco interno.
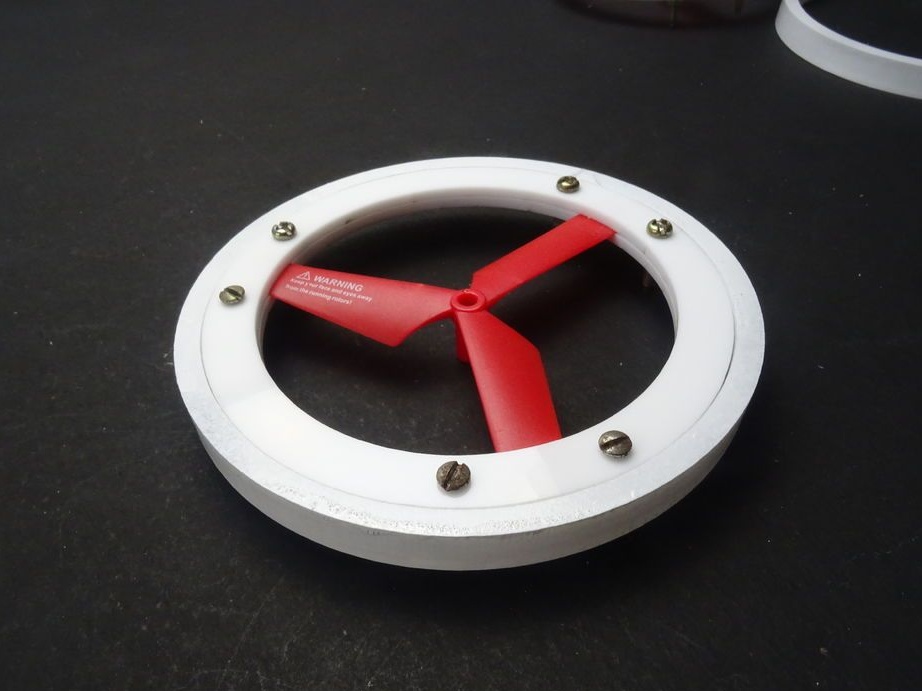

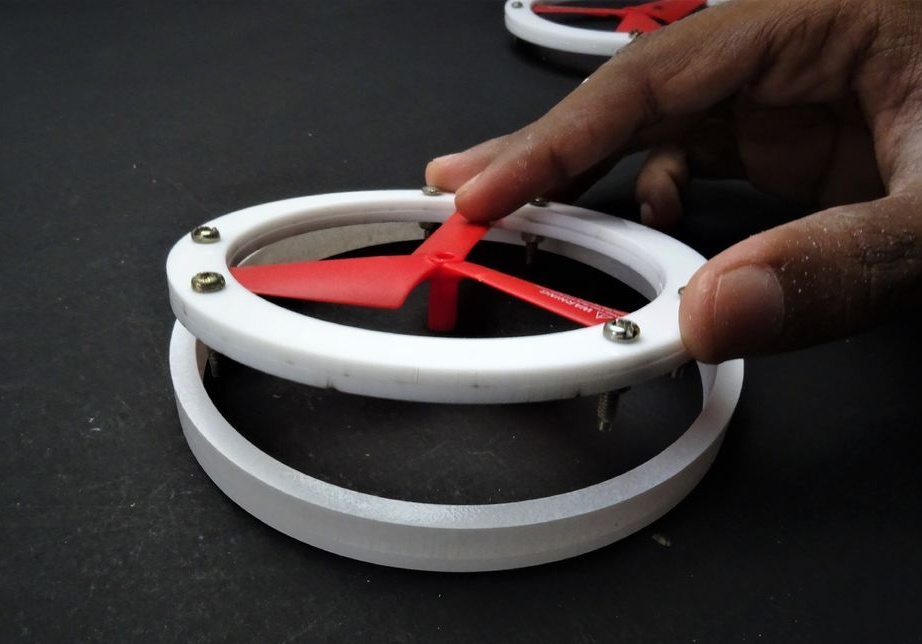
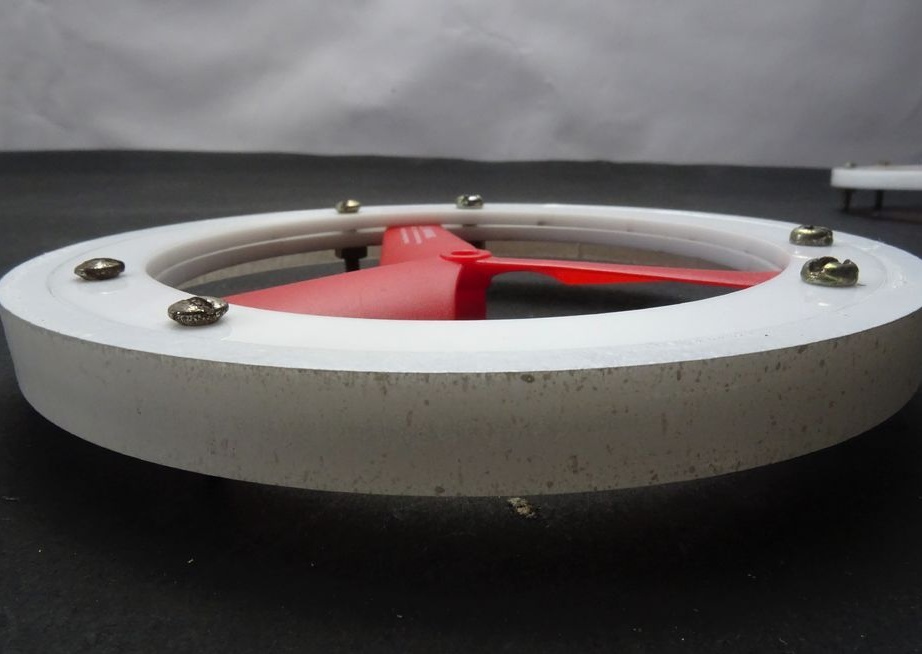

Aplique cola quente na junta.


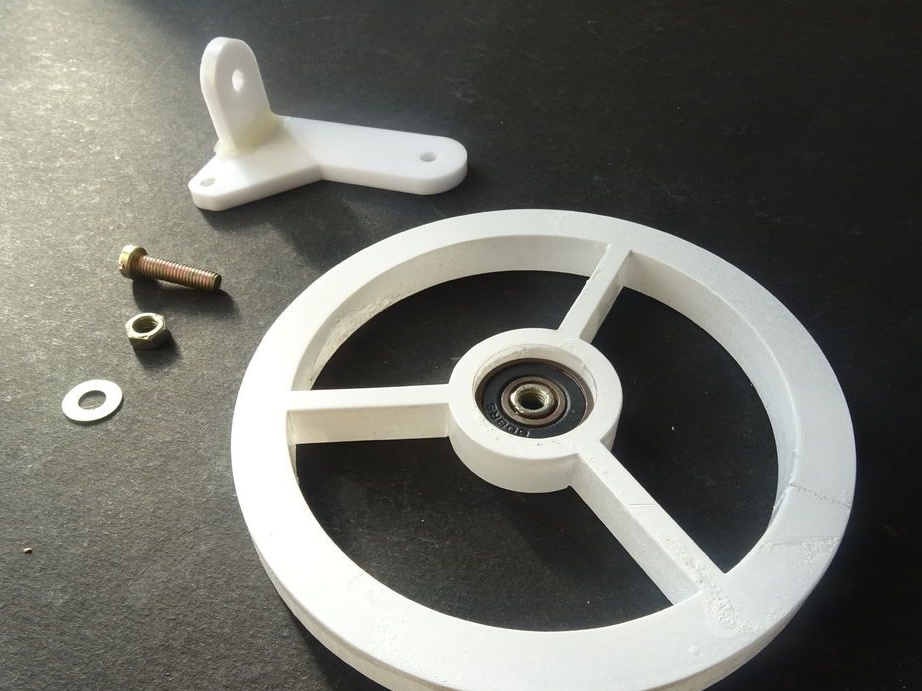
Agora recolhe as rodas dianteiras.
Uma porca de tamanho adequado obstrui a pista interna do rolamento. Pressiona os rolamentos nas rodas dianteiras.
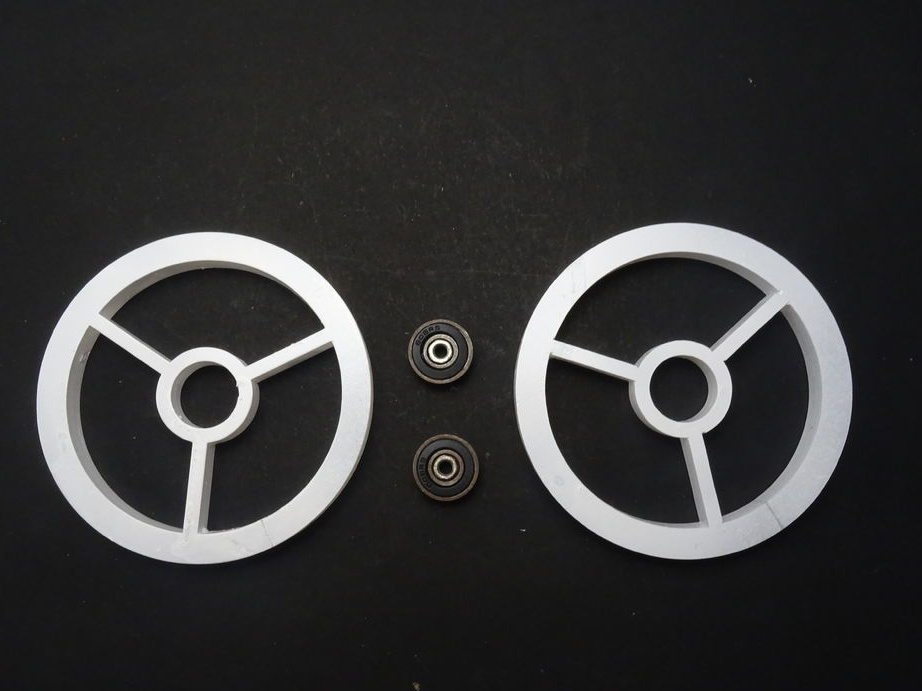



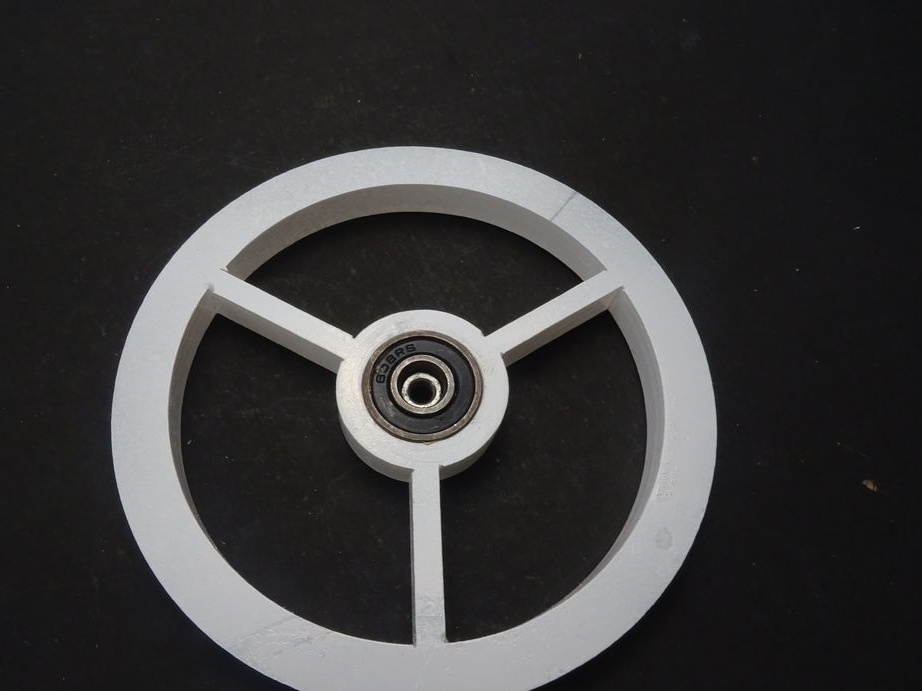
As rodas estão prontas.

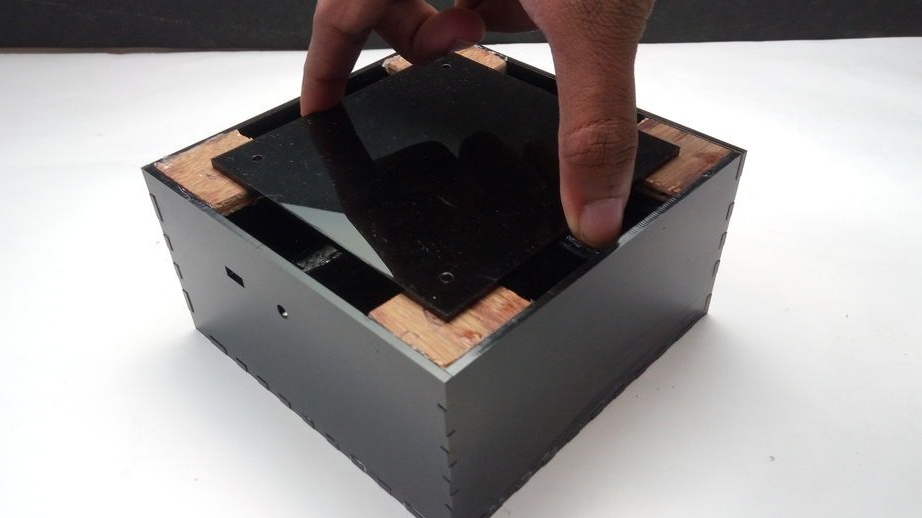
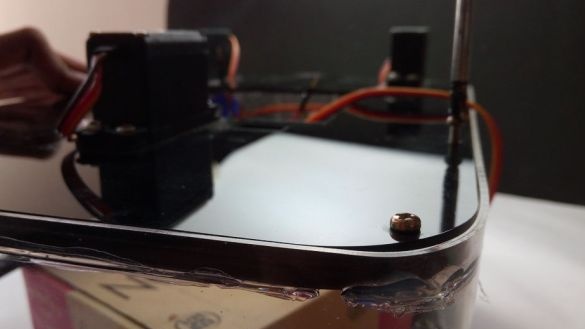
Etapa Doze: Gabinete Eletrônico
Cola a carcaça para a eletrônica.

Esta caixa conterá tudo eletrônico componentes, o que significa que ele precisa ser impermeabilizado da maneira mais completa possível.


Quatro quadrados são cortados e colados no quadro nos cantos da caixa. A tampa da caixa será anexada a eles.



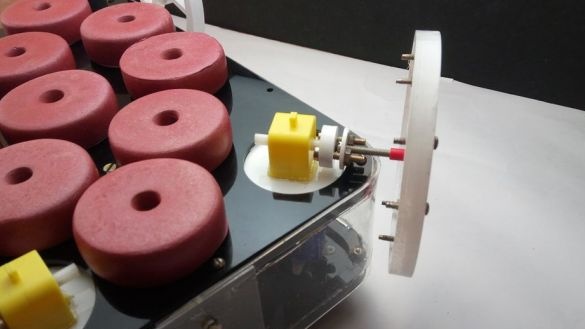
Etapa Treze: Montagem da Roda
Agora você precisa conectar as rodas e as engrenagens com uma embreagem.





Aparafusa as rodas dianteiras à tração.


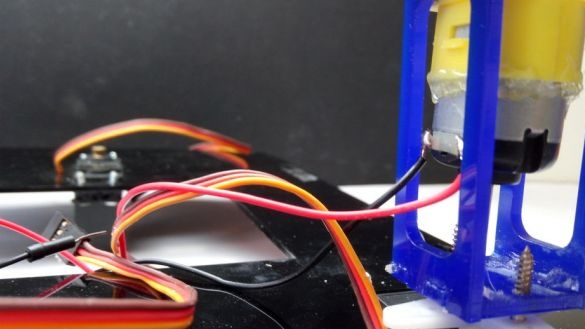
Etapa Quatorze: Conectar Eletrônicos
De acordo com o esquema, instala peças elétricas.
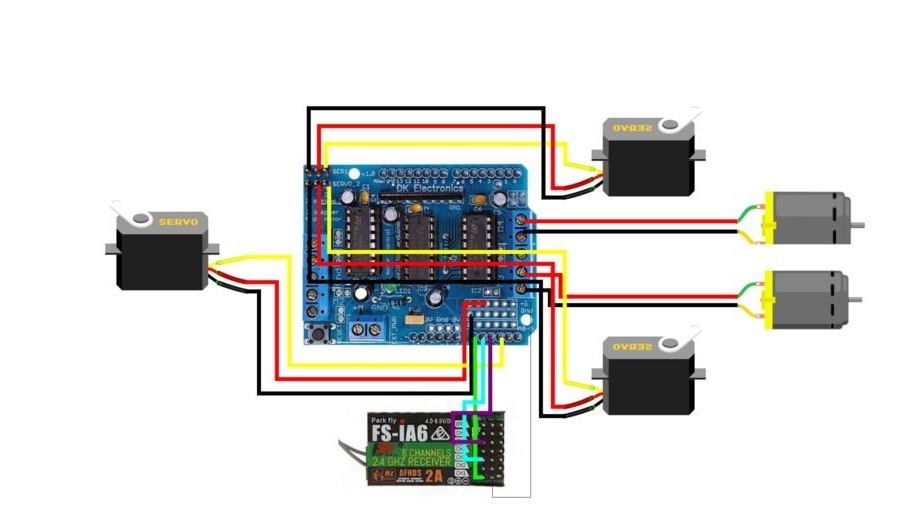

Os fios do motor esquerdo para M1, o direito para M2. Conecta um driver de mecanismo. Conecta servos. Instala o receptor: gnd do receptor em gnd Arduino; Receptor de +5 V para +5 V Arduino; pino 3 a A0; pino 1 a A1; pino 5 a A2. Conecta a bateria.
Etapa Quinze: Código de Download
Primeiro você precisa baixar a biblioteca.
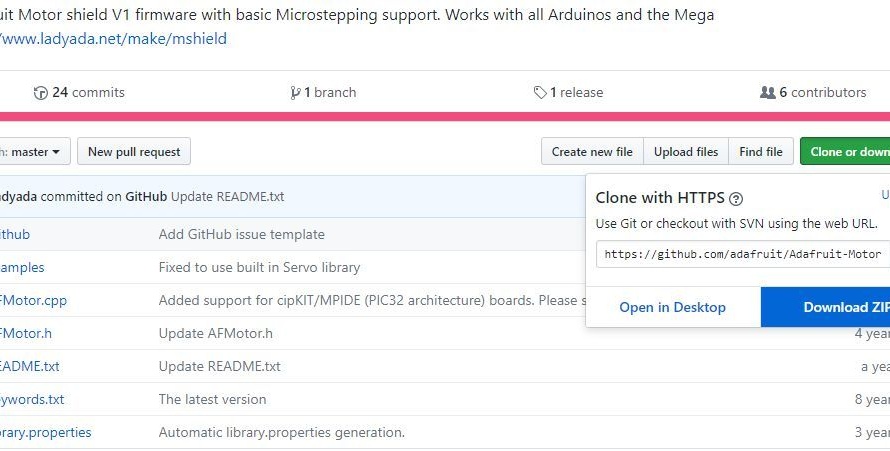
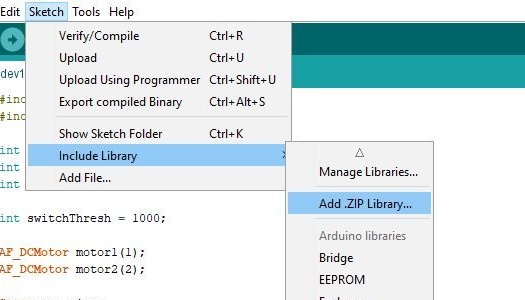
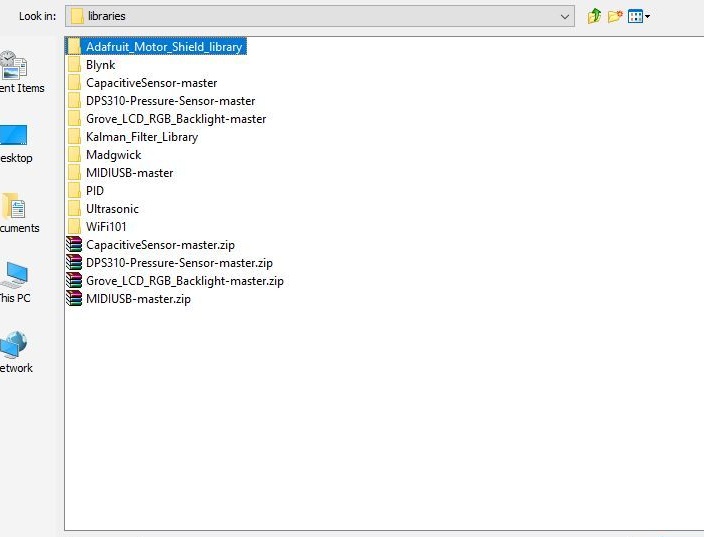
Em seguida, faça o download do código. Ao carregar, a bateria deve ser desconectada.
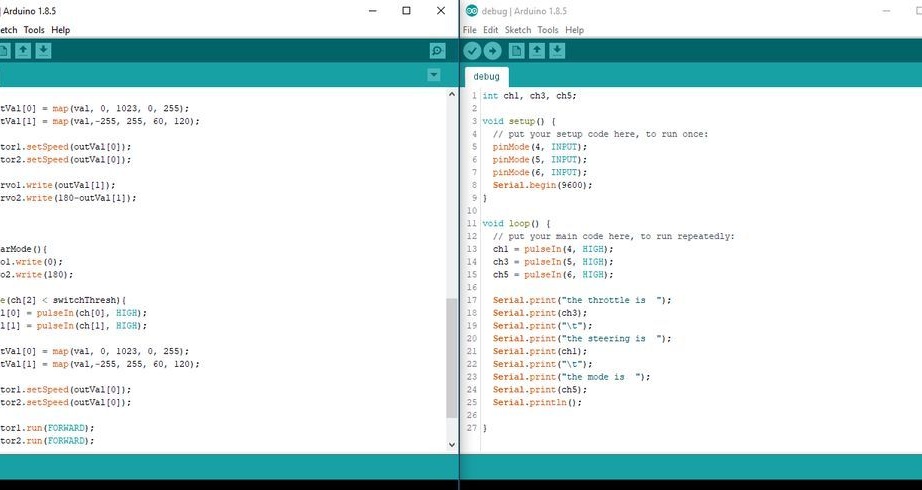
Faça o download do código abaixo.
amphibious_rover_code.ino
Após o download do código, ele verifica a operação de motores e acionamentos.
Etapa dezesseis: montagem
Agora é hora de montar o veículo todo-o-terreno.
[centro[/ center]
Instala servos. Instala motores de engrenagem.

Aperta as rodas. Torce as duas metades do corpo.






Está tudo pronto e agora você pode testar.