


Boa tarde, hoje quero compartilhar instruções para fazer um tanque de brinquedos controlado pelo acelerômetro de um telefone Android. A base do tanque será feita de compensado colorido com 3 mm de espessura. Lagartas e motor de dupla engrenagem da conhecida empresa Tamiya. Produzindo peças de qualidade e de baixo custo.
Para o tanque, precisamos de:
- Engrenagem dupla Tamiya 70168
- Conjunto de rolos e esteiras Tamiya 70100
- Tamiya 70157
- Contraplacado 10 mm (um pequeno pedaço)
- Arduino Pro Mini 5V AtMega 328
- DRV 8833
- Módulo Bluetooth HC-06 ou equivalente
- USB-UART para firmware Arduino
- LEDs retangulares vermelhos e verdes
- LEDs brancos 5 mm 2pcs.
- Resistores 3x 150 Ohms
- baterias Li-ion 18650
- Conectores Dad-Mom da Dupont
- Fios de cores diferentes
- solda
- Rosin
- ferro de soldar
- Parafusos 3x40, 3x20, porcas e arruelas para eles
- 2x10 parafusos de madeira
- Brocas para madeira de 3 mm e 6 mm
- Serra de traste elétrica
- Tinta acrílica
Etapa 1 Montagem do moto-redutor.
Eu gosto de usar motores de engrenagem Tamiya. Eles são aceitáveis, montam facilmente. O Tamiya 70168 possui quatro opções de compilação. Dependendo da relação de transmissão desejada e da posição dos eixos de saída.
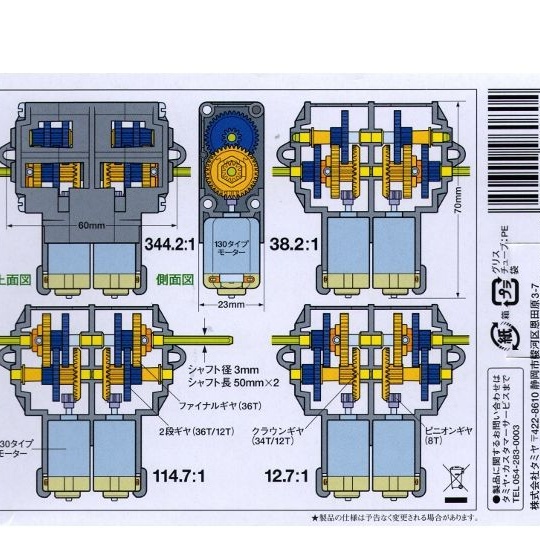
Instruções detalhadas estão incluídas dentro da caixa de velocidades. Precisamos que os eixos de saída estejam mais próximos dos motores e a relação de transmissão 114,7: 1. Selecionamos a opção necessária e coletamos tudo de acordo com as instruções, exceto para a instalação de motores. É mais conveniente colocar os motores mais tarde; além disso, os fios e capacitores devem ser soldados a eles antes da instalação.
Etapa 2 Produção de partes do corpo.
O estojo será feito de madeira compensada com 3 mm de espessura. Faça o download da imagem a seguir e imprima-a em uma folha A4 em uma escala de 102%.
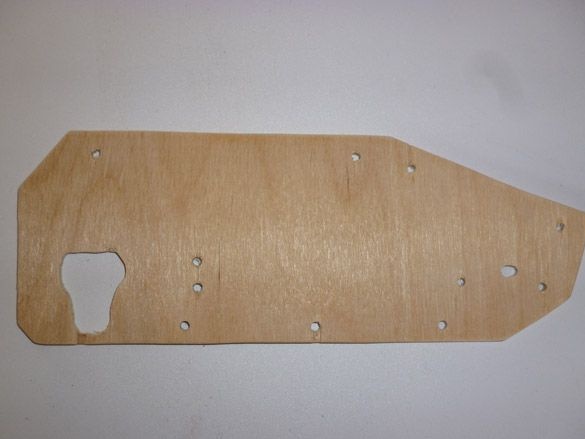
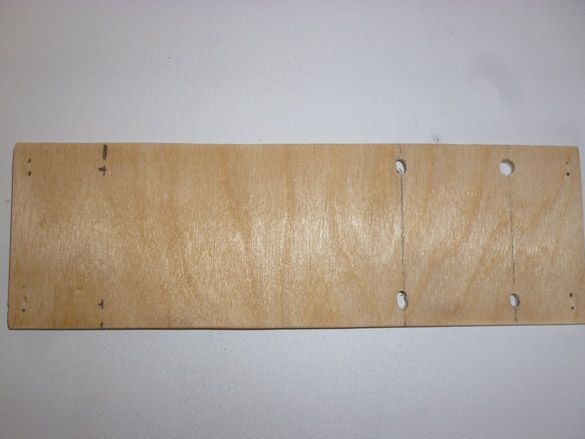
Agora pegamos dois pedaços de madeira compensada de tamanho suficiente, colocamos um no outro, aplicamos nossa foto por cima. Furos de 3 mm devem ser feitos nas áreas marcadas com um ponto em negrito. Para que as duas partes sejam iguais, primeiro perfuramos uma folha e dois contraplacados em um dos pontos, inserimos um parafuso ali e giramos a figura e dois pedaços de contraplacado juntos. Em seguida, o segundo orifício e também insira um parafuso lá. Depois disso, perfuramos todo o resto. Preste atenção ao orifício mais à esquerda, é necessário dar uma forma oval. Isso é necessário para controlar a tensão das faixas. Agora pegamos um quebra-cabeças e recortamos imediatamente duas partes laterais do estojo, seguindo a linha em negrito da imagem. Dois desses detalhes devem aparecer:
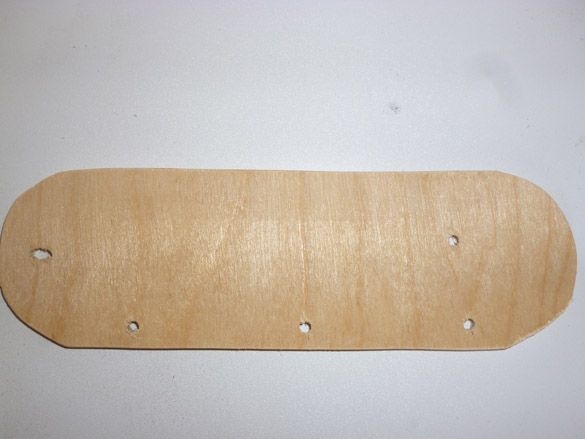
Em seguida, você precisa fazer tudo o que precede, mas desta vez recortamos dois detalhes que cobrem as faixas. É necessário cortar o pequeno oval desenhado na imagem. Como resultado, temos mais dois detalhes:
Agora pegamos uma folha de madeira compensada em uma camada e cortamos um retângulo com dimensões de 168 x 54 mm. Este será o fundo do nosso tanque e a parte à qual o motor de engrenagem está conectado:
Para iniciar a montagem, precisamos de todos os detalhes descritos acima:

Você pode deixar todos os detalhes como estão, mas prefiro pintá-los. A tinta acrílica é adequada para pintura. Seca rapidamente e não cheira, o que significa que você pode pintar em qualquer ambiente sem medo de envenenar. Então, pintamos os detalhes do recorte:

Agora precisamos de madeira compensada de 10 mm ou uma vara de madeira adequada. É necessário cortar um retângulo medindo 54 x 15 mm e uma espessura de 10 mm. Esta parte é necessária para conectar a carcaça. Depois de fazer um retângulo, perfuramos dois furos a uma distância de 15 mm da borda, primeiro com uma broca de 3 mm e depois 6 mm, mas não completamente, mas apenas metade da profundidade. Insira as porcas nos orifícios obtidos e fixe-as com cola. Precisamos de quatro desses detalhes:

Mais uma vez, contraplacamos 3 mm de espessura. Corte um retângulo 107 x 60 mm. Recuando 15 mm das bordas do furo de 3 mm, esta será a tampa superior:

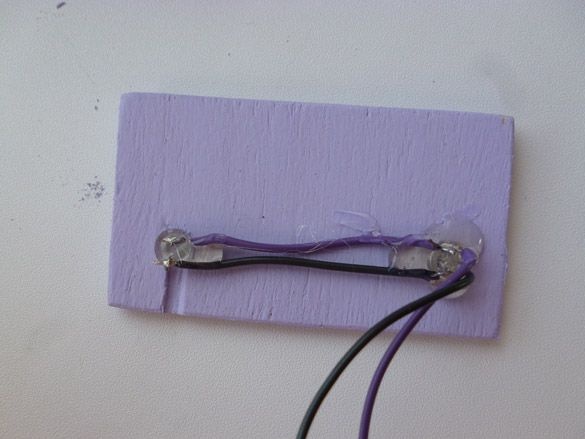
Cortamos o próximo retângulo medindo 33 x 60 mm. Apoiando 15 mm das bordas, perfuramos dois furos com um diâmetro de 5 mm. Cortando e decapando uma peça, nós a pintamos. Em seguida, inserimos LEDs brancos de 5 milímetros nos orifícios feitos. Nós os soldamos em paralelo e corrigimos usando adesivo hot melt:
Etapa 3 Montagem da carcaça.
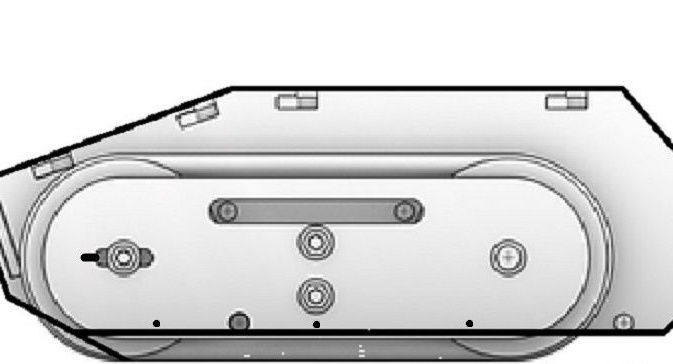
Depois de preparar o motor e as peças, procedemos à montagem de tudo juntos. Para começar, pegue a parte inferior da caixa e aperte o motor da engrenagem:
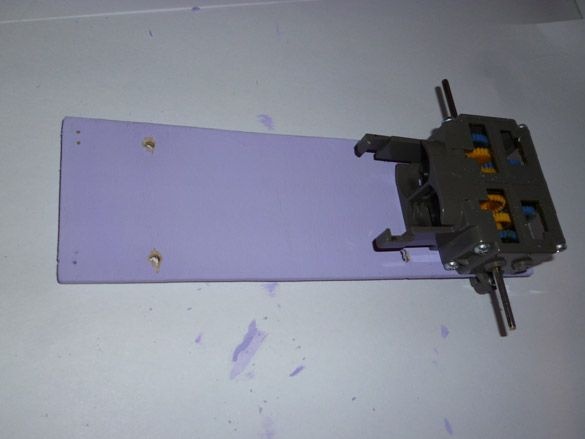
E um pouco maior:

Em seguida, consertamos as partes laterais, usando cantos de um construtor de ferro infantil e parafusos de 3x20 mm para isso:

Agora precisamos instalar as faixas. Tomamos os detalhes das faixas de fechamento. Nós inserimos parafusos de 3x40 mm nos orifícios. Colocamos uma roda grande no parafuso dianteiro, na parte inferior três pequenas, depois as arruelas e apertamos as porcas, mas não apertadas, para que todos os roletes girem livremente. Colocamos rodas dentadas grandes nos eixos do moto-redutor. Combinamos todos os parafusos com rolos com orifícios nas partes laterais. Depois de passar os parafusos, enrolamos e apertamos as porcas por dentro da caixa. Colocamos nos trilhos, verificamos se estão suficientemente apertados. As lagartas não devem ceder, mas muita tensão as danificará. O ajuste é realizado pela roda dianteira, movendo-a ou vice-versa, afastando-a do motor da engrenagem. Depois de todas as manipulações, obtemos:

Pegamos os motores que acompanham os rolos e as esteiras. Soldamos as pastilhas de contato do fio e, paralelamente a elas, um capacitor de microfarad 0,1. Depois disso, instale os motores no motoredutor:

Vamos para as baterias. Soldamos nossas baterias Li-ion 18650 em paralelo e emitimos os fios por conveniência. Torça-os com fita isolante:

Colocamos eles na parte inferior do gabinete, ao lado dos motores:

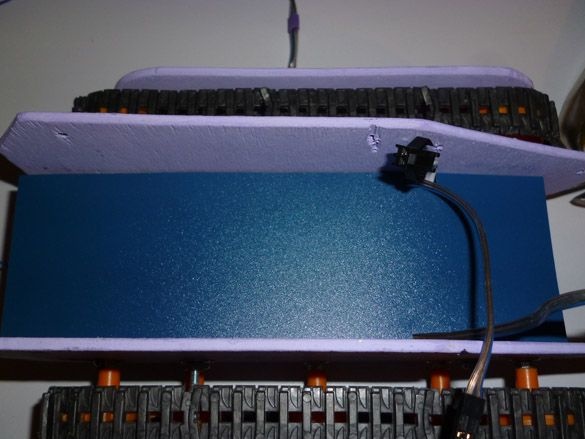
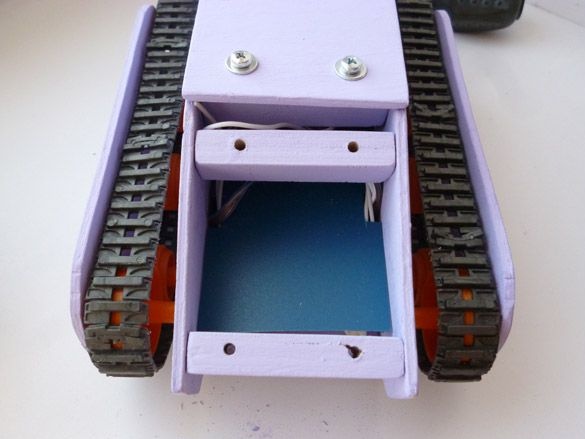
Por conveniência, bem como a separação de componentes mecânicos e e partes, corte um retângulo de 100 por 54 mm de plástico ou papelão fino. Coloque-o em cima do moto-redutor e das baterias:
Pegamos prendedores e instalamos como mostrado na foto. Fixamos nas partes laterais usando parafusos:
Na parte de trás do tanque, anexamos LEDs retangulares à cola quente. Vermelho e verde:

Também uso cola quente para fixar a parte da frente com os faróis:

Etapa 4 Elétrica
Os motores elétricos interferem em sua operação e ocorre uma queda de tensão durante a inicialização. Para que a cada partida dos motores o Arduino não sobrecarregue, vamos dividir a fonte de alimentação. O Arduino é alimentado por uma bateria de 9 volts do tipo coroa e motores a partir de baterias. Já colocamos as baterias, colocaremos a coroa na frente do tanque:

Após instalar a bateria, feche-a com a tampa superior:

Conectamos tudo de acordo com o esquema:

Eu vou explicar um pouco O motor esquerdo através do driver está conectado aos pinos 5 e 6. Direita - a 9 e 10. Além disso, do LED vermelho através do resistor até 3 pinos, menos GND. Além do LED verde, também através do resistor, de 4 pinos. Faróis de 2 pinos.
A operação do módulo Bluetooth é realizada através da biblioteca SoftwareSerial.Usaremos a porta de software. Os contatos de conexão podem ser alterados no esboço. Conectamos o módulo da seguinte maneira:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
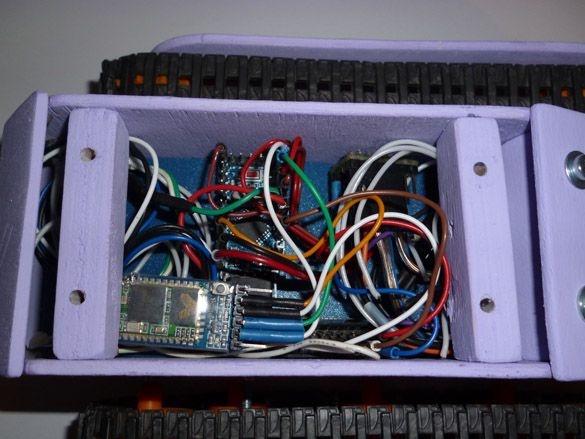
Juntando tudo, colocamos um eletricista na parte central:
Etapa 5 Software.
Para trabalhar com o esboço, você precisa fazer o download do IDE do Arduino. Continuamos e baixamos a versão mais recente:
Então você precisa adicionar a biblioteca. O SoftwareSerial já deve estar no IDE do Arduino. Mas por via das dúvidas, vou postar:
Se o IDE do Arduino, ao compilar o esboço, apresentar um erro e jurar na biblioteca ausente, descompacte o arquivo baixado na pasta “libraries” localizada na pasta com o IDE do Arduino instalado.
Etapa 6 Prepare o módulo Bluetooth.
As configurações padrão do módulo Bluetooth são diferentes daquilo que precisamos. Portanto, você deve primeiro estabelecer a conexão do módulo Bluetooth com o computador e alterar as configurações. Preencha o esboço Send_ AT_Bluetooth no Arduino:
O Arduino atuará como um link entre o Bluetooth e o computador. Inicie o IDE do Arduino, abra o Monitor de porta. Para HC-06, selecione 9600 nas configurações do monitor de porta, NL e CR não são necessários. Se uma conexão Bluetooth não for estabelecida com o módulo, ela estará no modo de entrada do comando AT. Talvez a primeira vez que o módulo não responda. Em seguida, tente sobrecarregá-lo desconectando e reconectando o fio positivo. Todos os comandos são inseridos sem aspas, não se esqueça de pressionar Enter para enviar. Nós inserimos os seguintes comandos:
"AT" - sem aspas, a resposta "OK" deve vir.
"AT + NAME
"AT + BAUD7" - defina a velocidade para 57600.
"AT + RESET" - sobrecarregamos o módulo.
Se algo deu errado ou não se lembra das configurações:
“AT + ORGL” - retorne o módulo às configurações de fábrica.
Etapa 7 Preencha o esboço.
Depois de configurar o módulo Bluetooth, continue com o esboço principal:
Etapa 8 Prepare seu telefone Android.
Antes de usar, verifique se o seu telefone ou tablet Android possui um acelerômetro. Para começar, adicione um dispositivo bluetooth tanchka no Android. Vamos às configurações do Bluetooth, localizamos o módulo Bluetooth que você nomeou e se conecta. A senha da conexão é "1234" ou "0000"; pode ser diferente para diferentes modelos. Agora instale o programa de controle. Vamos precisar de um carro RC Arduino Bluetooth ou controlador BT. Ambos os programas são gratuitos, têm a capacidade de controlar o dispositivo Bkuetooth através do acelerômetro e estão no Google play. Baixe o programa que você gosta no seu telefone ou tablet. No menu de configurações do programa, digite os seguintes comandos:
W - encaminhar
S - de volta
A - esquerda
D - direita
F ou G - pare
K - faróis
L - farol desligado
Você também pode usar o joystick para controlar o tanque. Pode ser feito de acordo com o meu outro instruções.
E adicione um módulo Bluetooth a ele, seguindo outro instruções.

