
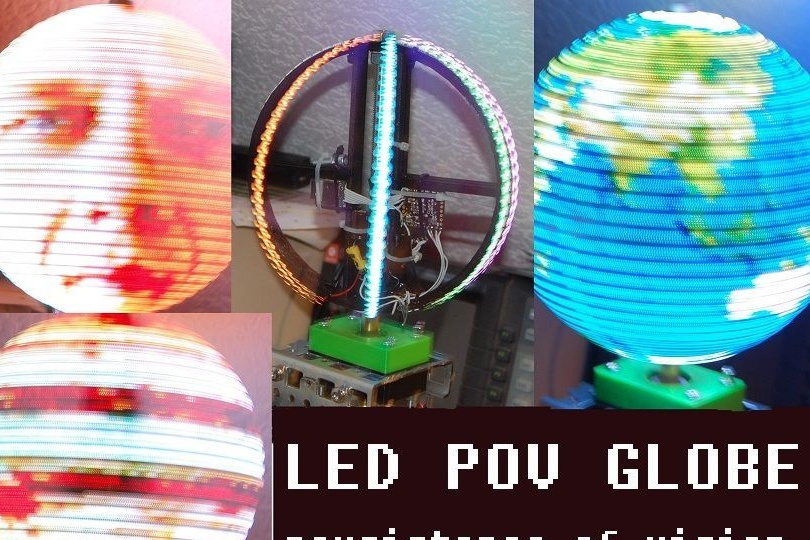
Este tutorial é sobre como construir um globo POV com menos. eletrônico componentes do que outros dispositivos semelhantes. Através do uso de LEDs RGB com um controlador APA102 integrado. Isso poupará a solda de vários fios. Você pode ler mais sobre eles. Esses LEDs não precisam de um driver adicional. Eles são conectados diretamente ao microcontrolador de duas maneiras. Isso permite que você troque os LEDs muito rapidamente. Para obter uma imagem estável, a sincronização SPI vem com uma frequência de 10 MHz. Outra vantagem desse design é o uso de um cartão flash, que armazena a imagem no formato BMP.
1 Materiais necessários

Para o eixo do globo, você precisará de:

1. Cavilha com rosca M8 e comprimento de 250 mm
2. Porca M8
3. Bucha de latão de 10 mm e 100 mm de comprimento
4. Arruelas de plástico 8 mm 2 peças (arquivos STL incluídos)
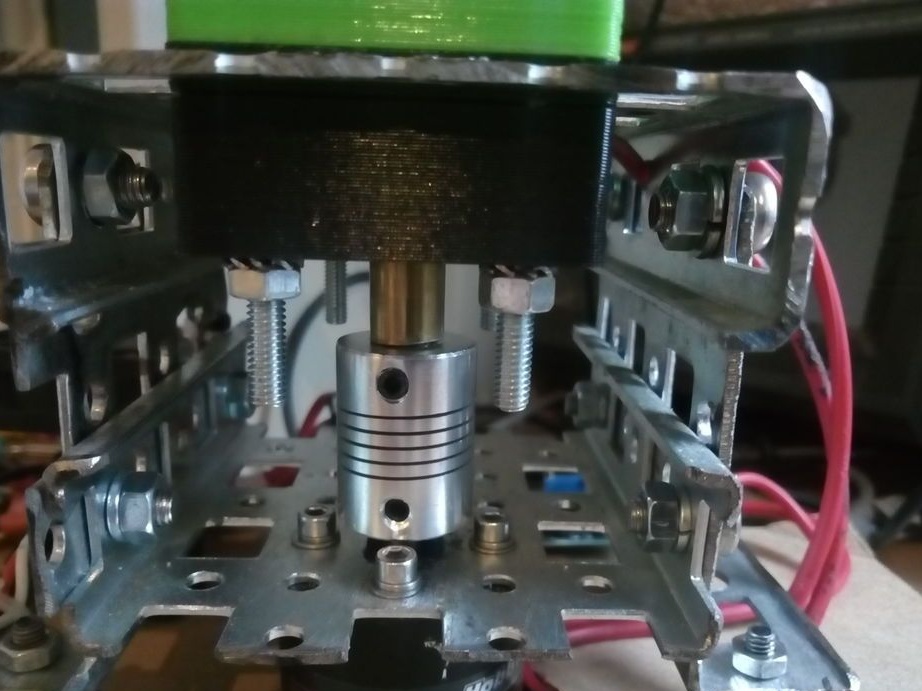
5. acoplamento para quem usará o motor de passo NEMA 17
Para alimentar o anel de LED no eixo, você precisará
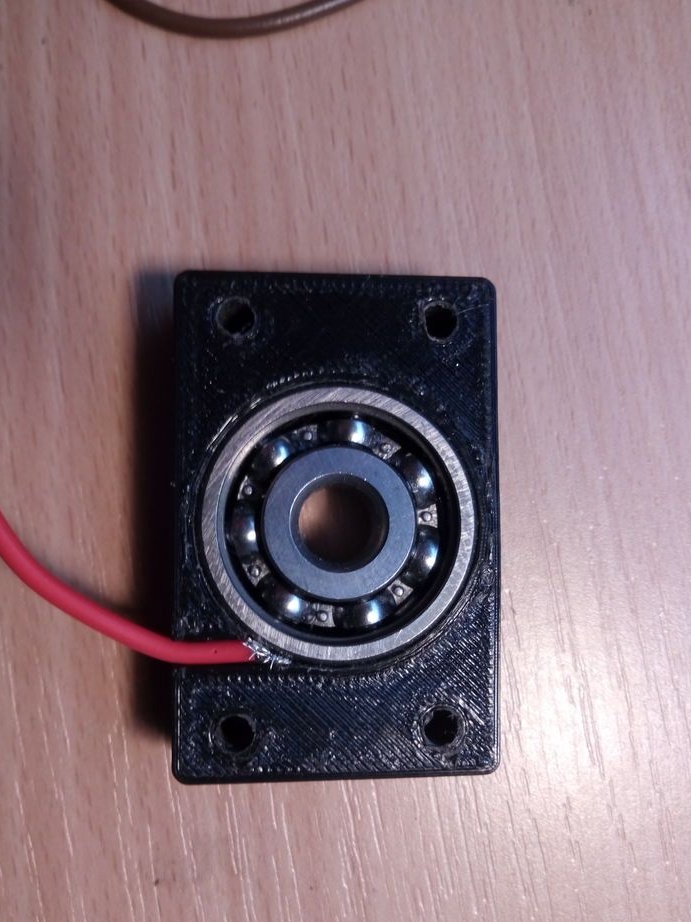
1. rolamento de esferas 6300 (10x35x11)
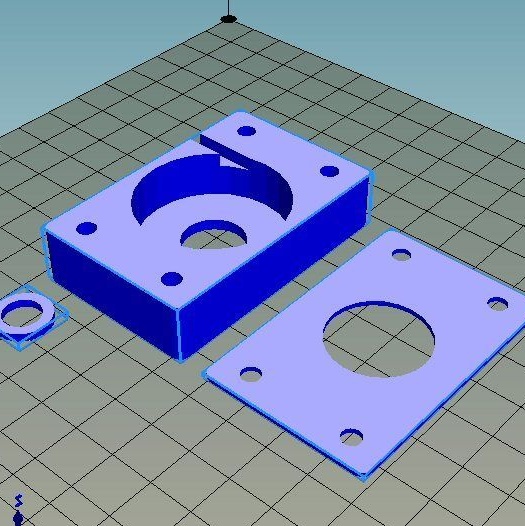
2. dois suportes para rolamentos. Impresso em uma impressora 3d ou em madeira.
3. Quatro parafusos M4x40 com porcas
4. Dicas sobre os fios 2 peças 8mm
5. com um diâmetro de eixo de 5mm
6. 4 parafusos M4 para montagem do motor
7. talvez um fã disso.
Como alternativa, você pode usar qualquer motor com o controle certo de torque e velocidade. O motor usado neste projeto possui um torque máximo a uma corrente de 50A, mas o consumo máximo de corrente durante a operação é de apenas 18A.
Para controlar o driver do servomotor, use
1.
2. dois botões
Fonte de alimentação 12V para motor e 5V para LEDs. Como fonte de alimentação, você pode usar a unidade antiga do PC. Você pode comprar uma fonte de alimentação de 12v / 5A e conectar-se a ela
Para o anel de LED, você precisará de:
1.664 LEDs 2 tiras de 32 peças
2. Capacitor 1000µF 10V
3. Sensor Hall e ímã
4. O resistor de pull-up 1k, 10k
5. O anel deve ser impresso em uma impressora 3D ou usar um pedaço de tubo de PVC
6. Laços de plástico (100 mm)
7. Uma boa cola que se cola e não se separa a 2500 rpm
Você também precisará de um microcontrolador de hélice Parallax. Ou você pode usar outro o modelo controlador, mas adicionalmente cobra uma taxa. Este controlador é programado e pisca tão simples quanto Arduino. Você precisará de um adaptador USB-TTL para programar os dois controladores.
Corpo.
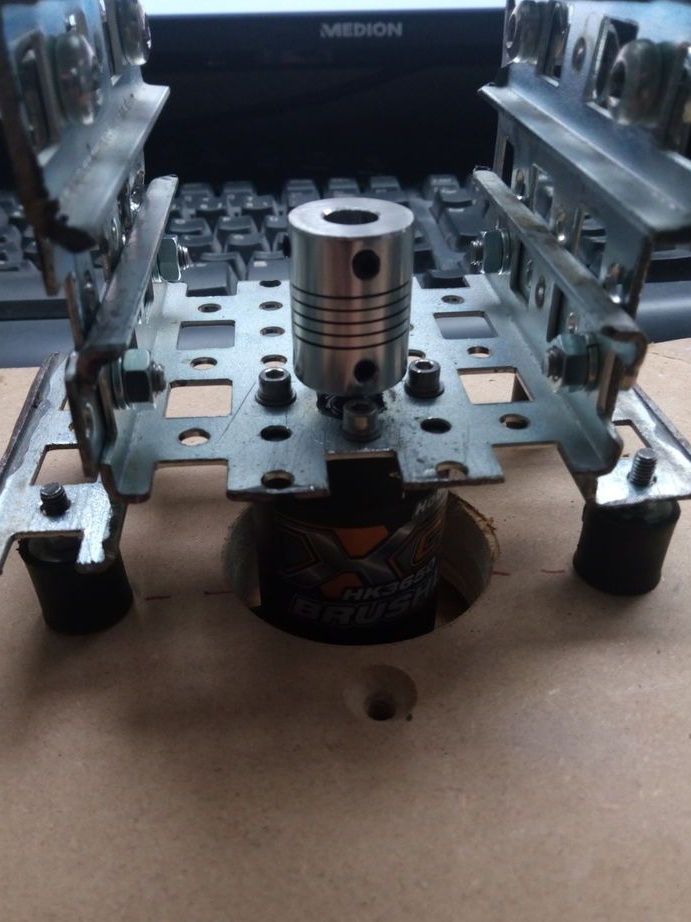
Habitação para caseiro Você pode aguentar o suficiente. O mais importante é que você pode prender com segurança o motor e os rolamentos.
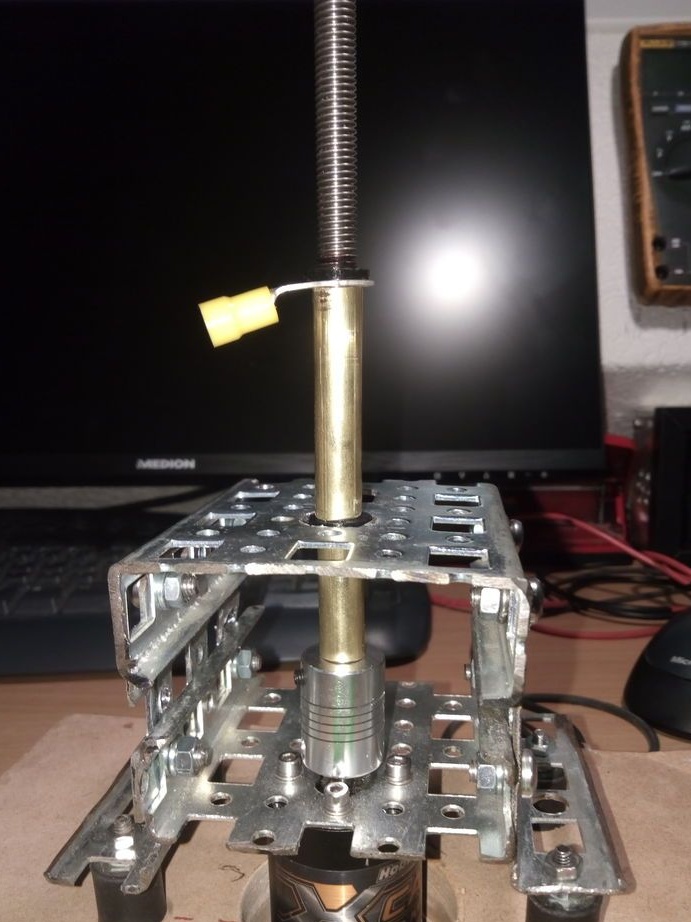
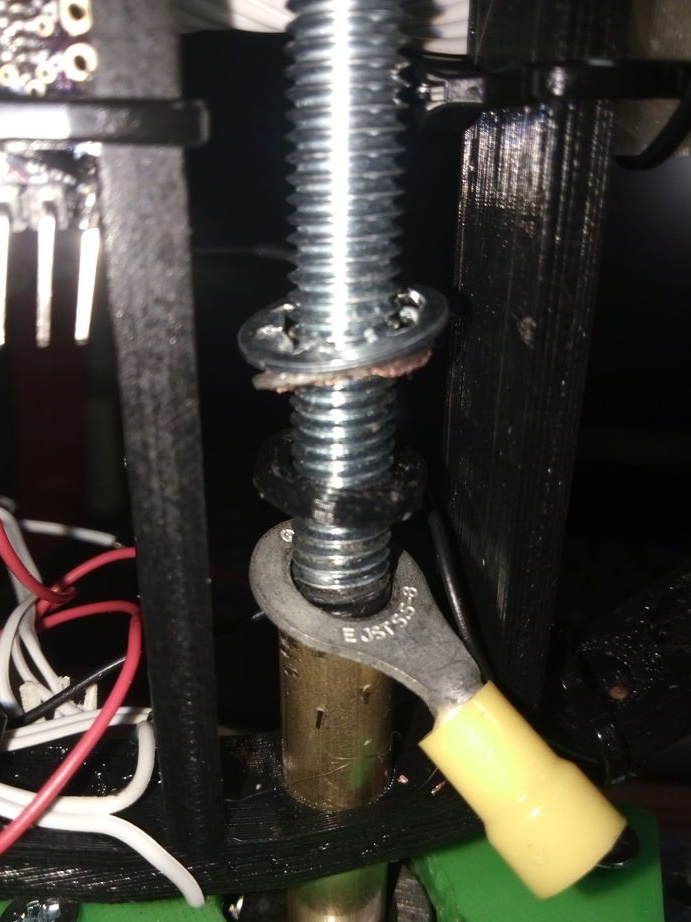
Um pino de 250 mm de comprimento é usado para o eixo de acionamento.O comprimento das buchas de latão é de 50 e 30 mm. Depende do tamanho do anel e do comprimento do eixo. A manga superior e mais longa deve ser isolada do pino, porque é usada para fornecer mais energia aos LEDs. Para fazer isso, enrole a fita isolante em um gancho de cabelo ou use termorretrátil, duas arruelas de plástico também serão necessárias. A manga precisará ser perfurada entre 8,5 e 9 mm, caso contrário não será adequada. A outra manga, juntamente com a haste, forma um contato negativo.
A energia negativa é colocada em uma ranhura especial e pressionada contra o rolamento no suporte, que pode ser impresso em uma impressora. Suporte o arquivo STL no arquivo morto.


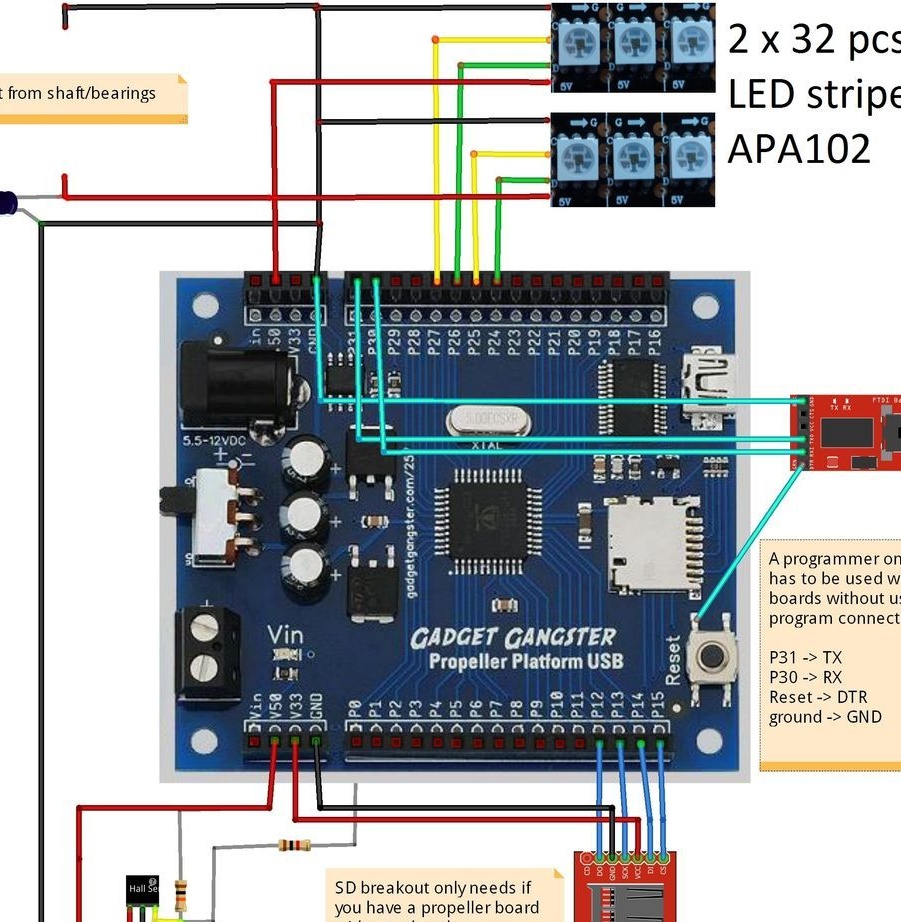
Agora você precisa conectar o motor elétrico, conforme mostrado no diagrama.
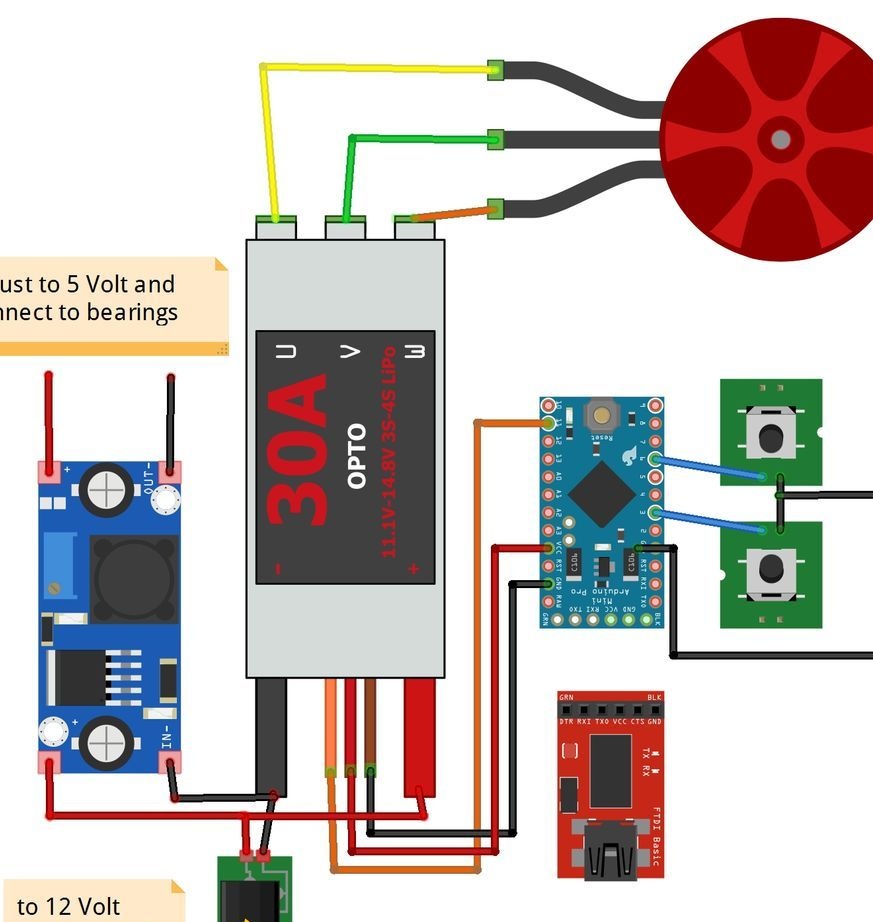
Dois botões no diagrama são usados para ajustar a velocidade. Quando você liga, o ESC receberá um valor de 500 μs. Pressione um dos botões para ligar o motor. O esboço assumirá o valor "StartPos = 625". Mais tarde, quando você ajusta a velocidade, esse valor pode ser alterado. Pressione o botão por dois segundos e o motor deve parar.
Montagem da estrutura do núcleo.
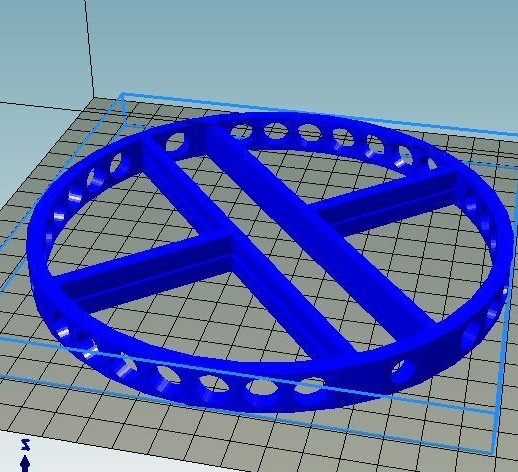

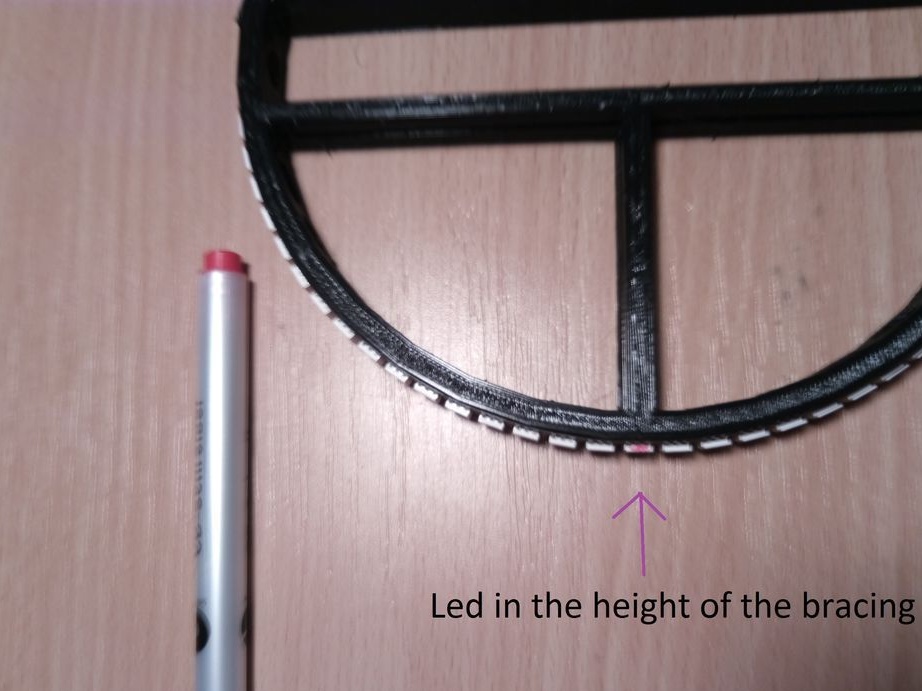
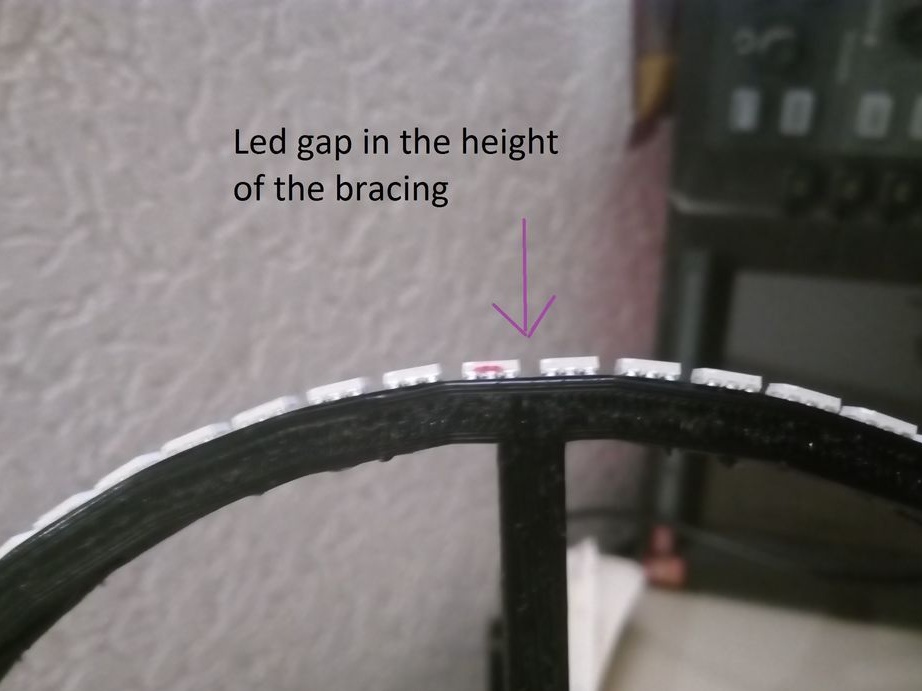


Para fazer isso, imprima o próprio anel a partir do arquivo anexado. O autor fez muitos buracos para reduzir o peso. Você pode usar um pedaço de tubo de PVC. Duas tiras de 32 LEDs são cortadas. Duas tiras de LEDs formam linhas pares e ímpares. Organize as fitas para que os LEDs de uma faixa fiquem localizados entre os LEDs da outra, mas no lado reverso. Depois de prender a fita, você pode conectar os LEDs da placa controladora. E então você precisa equilibrar toda a montagem.
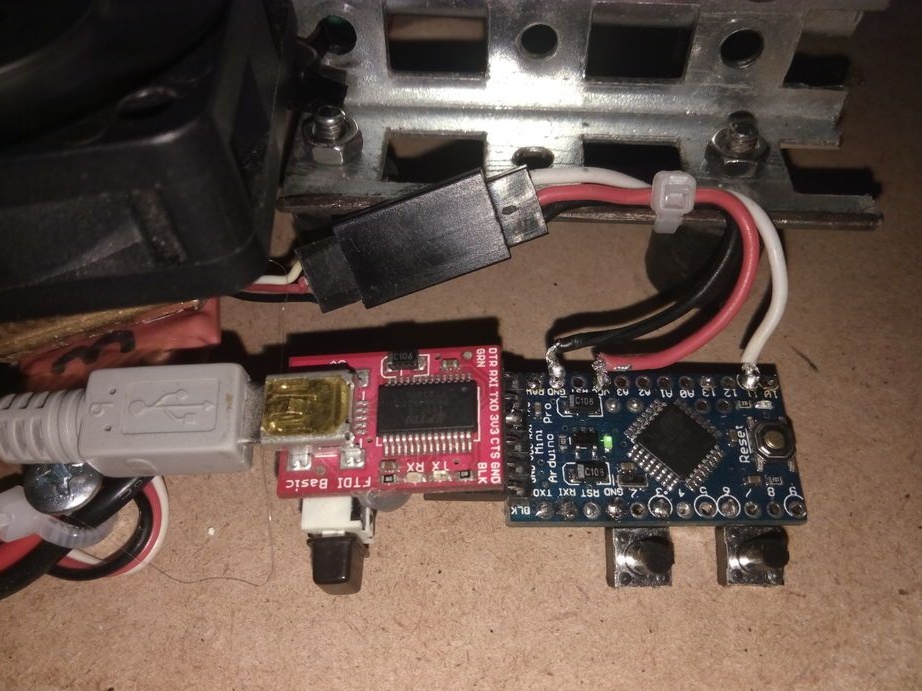
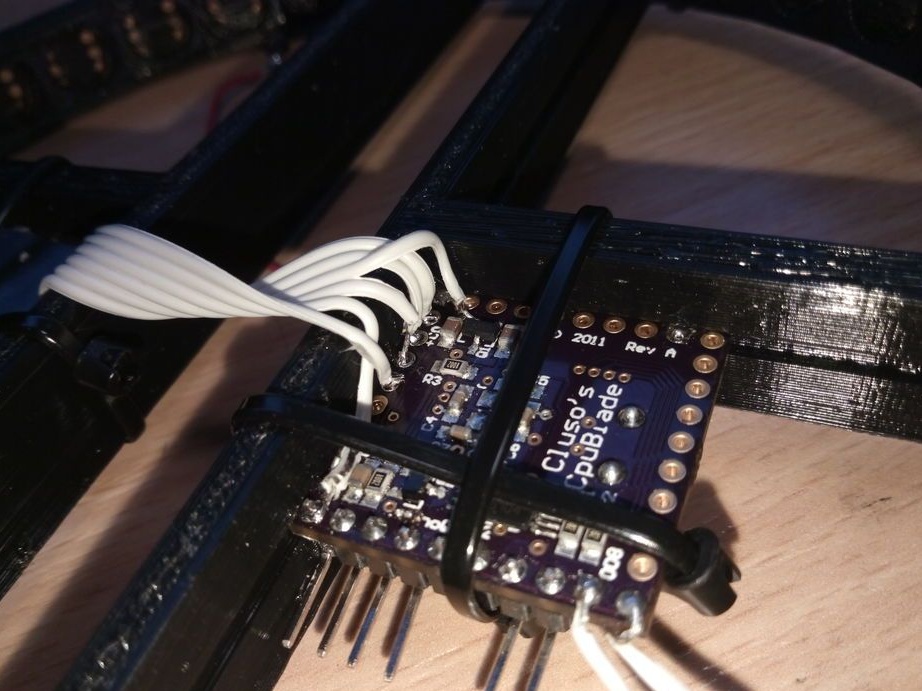
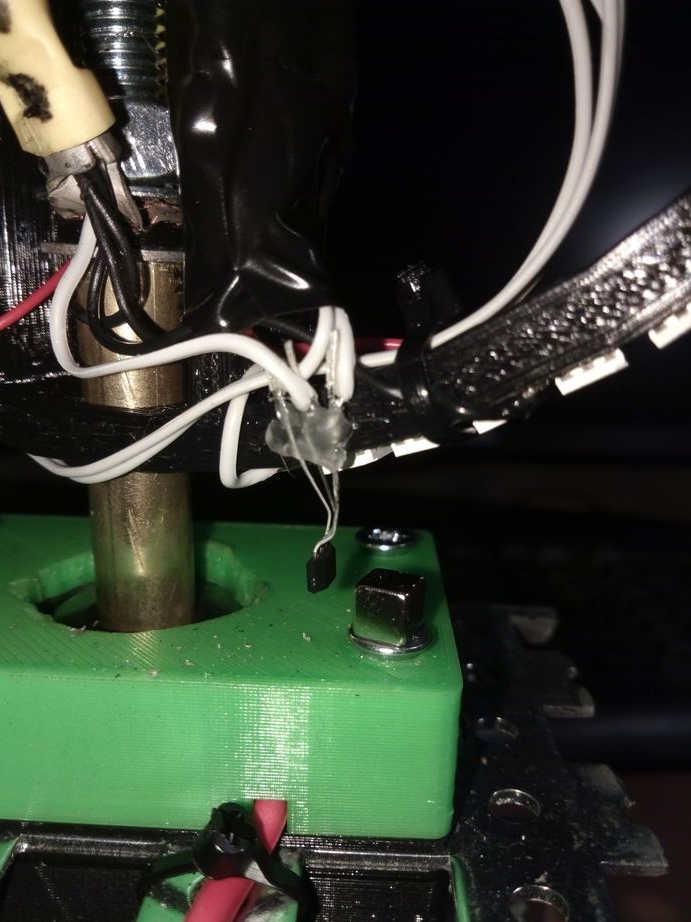
As fotos a seguir mostram como conectar todos os componentes do dispositivo. A foto também mostra o sensor do hall instalado com um ímã.
Para programar o microcontrolador de hélice Parallax, você precisa
NÃO conecte seu equipamento a uma porta USB ou serial até instalar o software. Mais detalhes sobre o upload de firmware para o Parallax podem ser encontrados
O autor usa uma placa MCU mais antiga e, portanto, menos econômica, em termos de consumo de energia, porque não consegue encontrar novas bibliotecas nas novas placas controladoras.
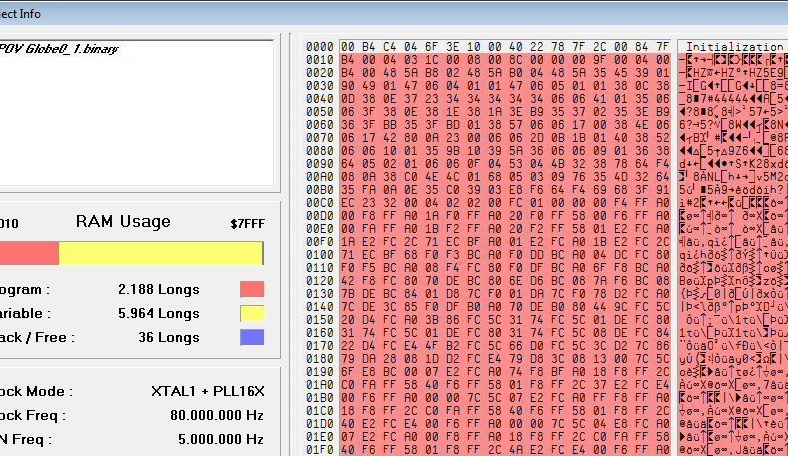
Depois de coletar e conectar tudo, você precisa programar o controlador. O autor faz isso com ajuda. Arquivos com firmware no arquivo morto.
Agora você pode tentar iniciar o dispositivo. Desde o início, copie a imagem de teste no cartão SD e cole-a no slot.
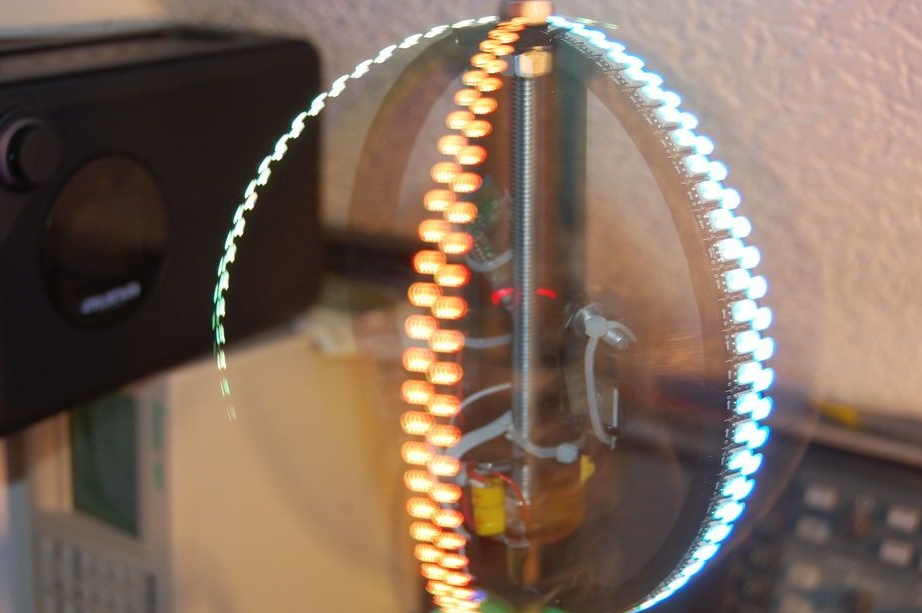
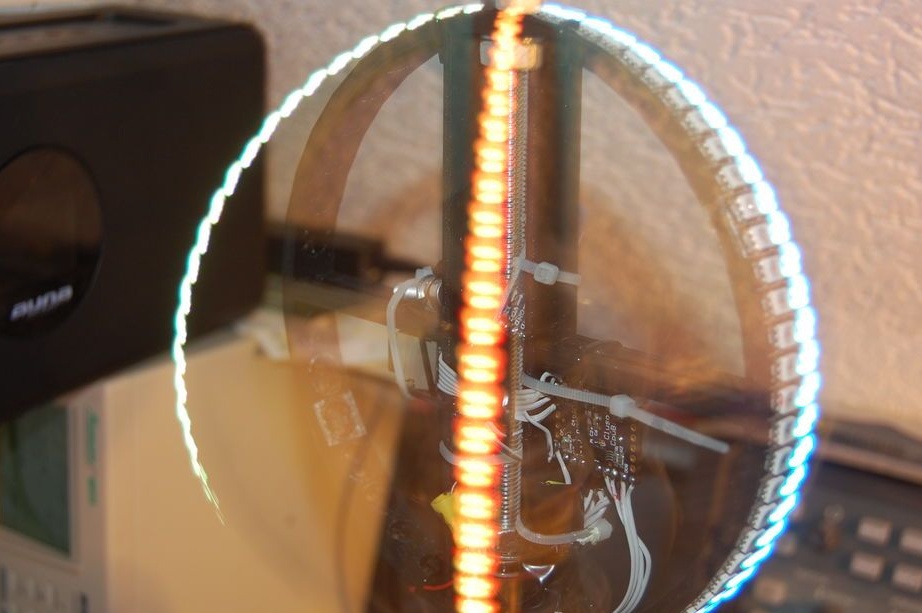
• Se você girar o anel manualmente, os LEDs deverão piscar toda vez que o sensor do hall passar pelo ímã
• Ligue o motor. Aumentando a velocidade com os botões, é necessário garantir que os LEDs acendam como mostrado em 2 fotos
• Conecte o terminal Arduino ao controlador do motor.
• Lembre-se do valor exibido.
• Desligue o motor
• Escreva o valor armazenado anteriormente na variável "startPos"esboço POV_MotorControl
• Programe o Arduino novamente.
A próxima vez que o motor ligar imediatamente na velocidade certa. Agora você pode "Preencher" no mapa qualquer imagem. Para fazer isso, é necessário redimensionar a imagem em 120x64 pixels, girar a imagem no sentido anti-horário em 90 graus e espelhar verticalmente. Diminua o brilho da imagem, pois os LEDs são muito brilhantes. Para fazer isso, é melhor usar a correção gama com um coeficiente de 0,45.
Salvar imagem como BPM 24 bits sem compressão. Após todas as manipulações, o arquivo de saída terá o tamanho 23094 byte.



