


Participei do meu projeto a partir das instruções de montagem do Lego Technic 42049 e Lego Technic 42041. O resto é minha improvisação. Para controle, usarei o módulo Bluetooth associado ao dispositivo ou computador Android. Então precisamos:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- motorista do motor L9110S
- 1 servoconversor SG-90
- Módulo Bluetooth HC-05 ou equivalente
- USB-UART para firmware do arduino
- Caixa de velocidades do motor 6v 1: 150 100 rpm
- 2 LEDs
- 2 resistores de 150 ohms
- Capacitor 10v 1000uF
- 2 pentes de uma linha PLS-40
- Indutor 68mkGn
- 6 baterias NI-Mn 1.2v 1000mA
- Conector pai-mãe dois pinos para fio
- Homutik
- Fios de cores diferentes
- solda
- Rosin
- ferro de soldar
- Parafusos 3x20, porcas e arruelas para eles
- Parafusos 3x40
- Parafusos 3x60
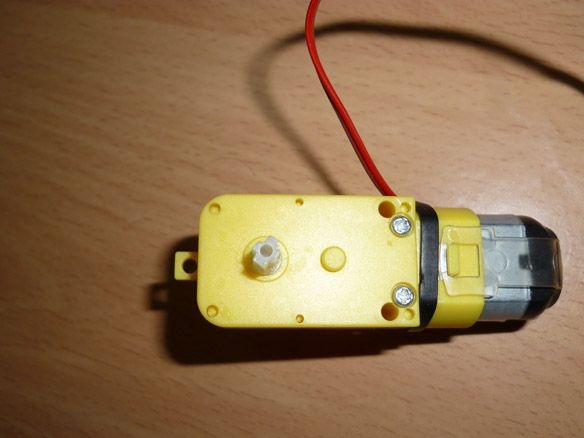
Etapa 1 Conjunto do eixo traseiro
O avanço - o retrocesso será realizado por um motor de 6V, com uma relação de transmissão de 1: 150 e uma marcha lenta de 100 rpm. Você pode tentar outra relação de transmissão, mas, na minha opinião, isso é ótimo. O eixo da caixa de engrenagens de ambos os lados deve ser entalhado em forma de cruz e colocar detalhes de lego:
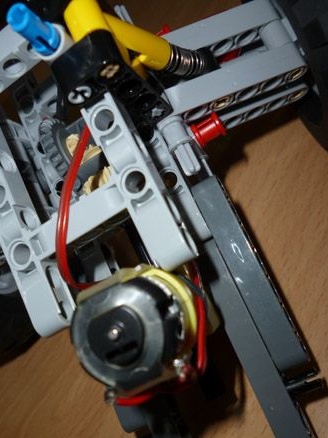
Em seguida, coletamos a base do eixo traseiro de acordo com as instruções da Lego 42029 parte 1, começando de 3 páginas a 8 inclusive. E adicione alguns detalhes para poder instalar o motor e a caixa de velocidades.
Visualizar arquivo online:
Visualizar arquivo online:



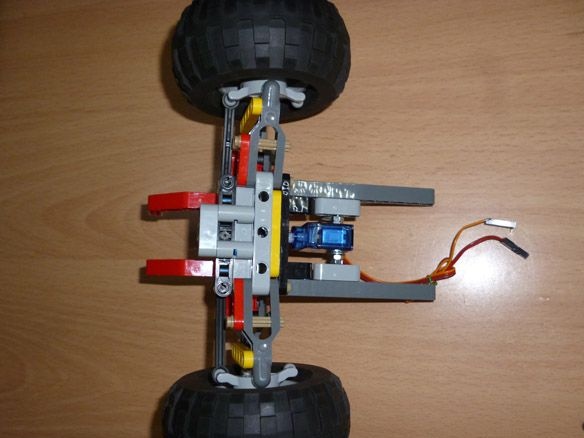
Etapa 2 Montagem do eixo dianteiro
Montamos a parte frontal da suspensão de acordo com as instruções da Lego 42029 parte 1, das páginas 21 a 23. Pegamos o trapézio da segunda parte da Lego das páginas 6 a 11. O Servo SG-90 é adequado para girar as rodas. Para fixá-lo em nosso modelo, é necessário perfurar com cuidado, para não tocar nas partes internas do servo, um orifício passante com diâmetro de 3,2 mm ou apenas cortá-lo com uma faca de papelaria. E também corte as partes salientes (“asas” para fixação). Nós inserimos um parafuso no buraco feito e o fixamos com porcas. No eixo do servo, colocamos a alavanca com a parte parafusada do lego:





Etapa 3 Montagem da base e da cabine
Conectamos as duas pontes, como mostra a foto:
Montamos a cabine de acordo com as instruções da Lego 42041. A partir das páginas 39 a 47 da primeira peça. Mais adiante, da página 5 à 28 da segunda parte. Bem como o para-choque nas páginas 38 a 43 da segunda parte das instruções.
Visualizar arquivo online:
Visualizar arquivo online:


Visualizar arquivo online:
Visualizar arquivo online:
Etapa 4 Elétrica
Para controle, usaremos o Arduino Pro Mini e o módulo Bluetooth. O Pro Mini pode ser substituído por qualquer outra placa Arduino. Eu escolhi o Pro Mini, por isso é o menor. O driver do motor é necessário para conectar o motor.
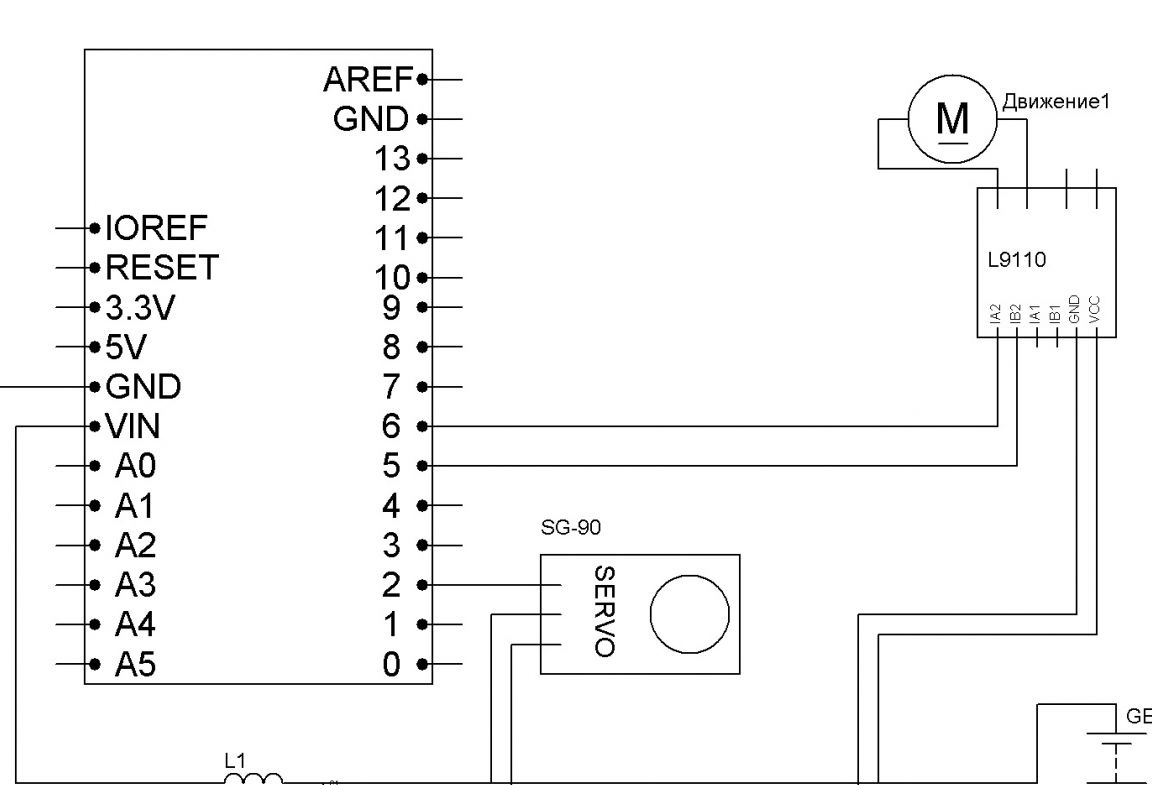
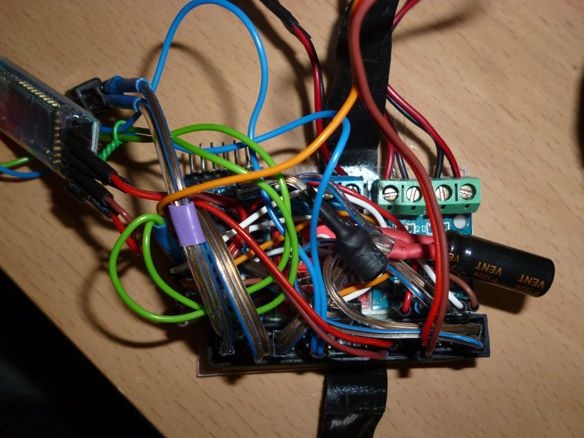
Conexão de todos os componentes com os fios mãe-mãe da Dupont. Alimentação - 6 baterias NI-Mn 1.2v 1000mA conectadas em série. Um capacitor de qualquer potência baixa, um indutor que você também encontrará, você precisa estabilizar a potência do microcontrolador. Os ânodos dos dois LEDs são conectados ao arduino de 4 pinos, os catodos ao GND. Os resistores são selecionados para os LEDs usados. Por conveniência, enrole as baterias com fita adesiva.

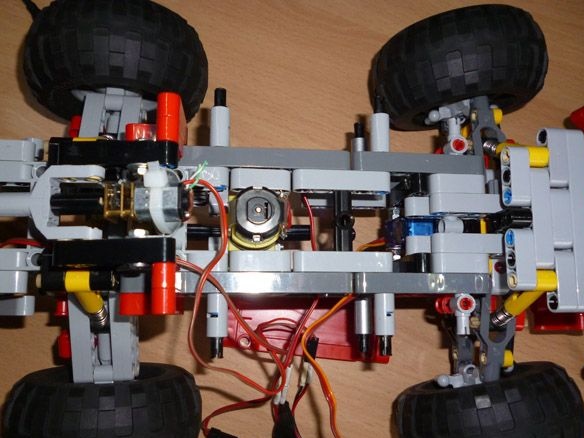
Colamos tudo em uma fita dupla face com base em:
Colocamos nosso eletricista entre as rodas e fechamos:
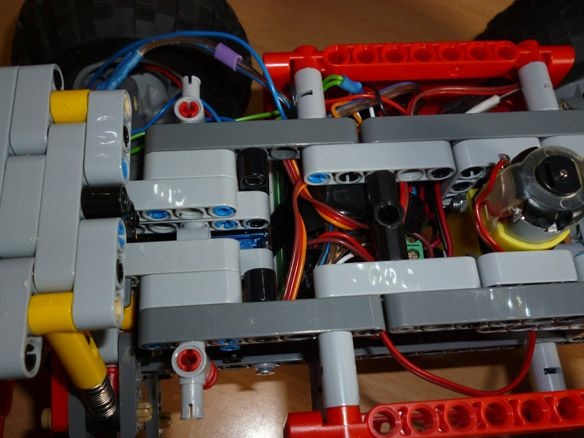
Adicione alguns traços:


Etapa 5 Configuração do Bluetooth
Os módulos Bluetooth mais acessíveis hoje são o HC-05 e HC-06. Eles são abundantes nas lojas online chinesas. As diferenças entre eles são que o primeiro pode funcionar tanto no modo mestre (escravo) quanto no modo escravo (mestre). O segundo é um dispositivo puramente escravo. Em outras palavras, o HC-06 não pode detectar um dispositivo emparelhado e estabelecer uma conexão com ele, apenas pode obedecer ao mestre.
Breves características dos módulos:
- Chip Bluetooth - BC417143 fabricado pela
- protocolo de comunicação - Especificação Bluetooth v2.0 + EDR;
- raio de ação - até 10 metros (nível de potência 2);
- Compatível com todos os adaptadores Bluetooth compatíveis com SPP;
- A quantidade de memória flash (para armazenar firmware e configurações) - 8 Mbit;
- a frequência do sinal de rádio - 2,40 .. 2,48 GHz;
- interface host - USB 1.1 / 2.0 ou UART;
- consumo de energia - a corrente durante a comunicação é de 30 a 40 mA. O valor atual médio é de cerca de 25 mA. Após o estabelecimento da comunicação, o consumo atual é de 8 mA. Não há modo de suspensão.
Normalmente, os módulos são vendidos como duas placas soldadas juntas. O menor é um módulo de fábrica, amplamente utilizado em vários eletrônico dispositivos. Grande - uma tábua de pão especial para bricolage.
É assim que os módulos HC-05 e HC-06 DIY são:
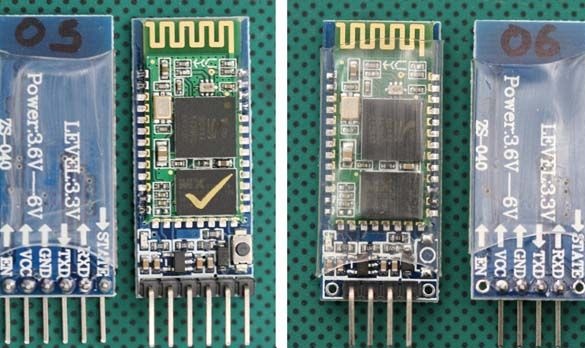
Em princípio, você pode usar qualquer módulo que desejar. Um módulo sem uma placa de ensaio custa menos, mas você terá que cuidar da fonte de alimentação de 3,3 V do módulo e atormentar-se soldando os fios do módulo. Escolhi o ideal, na minha opinião, na relação preço / funcionalidade HC-06.
Nós conectamos da seguinte forma:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
Para uma operação adequada, o módulo deve ser configurado. Vamos configurar os comandos AT inseridos na janela do terminal. Eu dou um exemplo de configuração do módulo HC-05. Se você tiver uma configuração diferente, poderá ser diferente. Para que nosso módulo receba comandos, primeiro exibimos o Arduino com o seguinte firmware:
Nesse caso, o Arduino atua como uma ponte entre os computadores e o módulo. No firmware, eu uso a biblioteca SoftwareSerial. Em altas velocidades, funciona instável. Se você deseja alta velocidade, pode conectar o módulo diretamente aos contatos do Arduino RX e TX e reescrever o firmware. Mas no meu caso, trabalharemos com o módulo a uma velocidade de 9600. Portanto, após o firmware, abra o terminal e digite:
“AT” (sem aspas) a resposta “OK” deve aparecer (significa que tudo está conectado corretamente e o módulo está funcionando)
“AT + BAUD96000” (sem as aspas) a resposta “OK9600” deve vir.
Se você tiver a resposta certa, vá para a próxima etapa.
Etapa 7 Firmware
Para escrever o firmware e o próprio firmware, eu uso o IDE do Arduino. A versão atual para hoje é 1.8. Na verdade firmware:
Etapa 8 Configure seu telefone.
Em um telefone Android, você precisa instalar um programa para controlar o robô via Bluetooth. Existem muitos deles. Você pode inserir "Bluetooth Arduino" no Google play e escolher a seu gosto. Eu gostei do BT Controller. Faça o download e instale no seu telefone ou tablet Android. Em seguida, através das configurações do Android, você precisa estabelecer uma conexão com o nosso módulo. A senha da conexão é "1234" ou "0000". Em seguida, configure o programa para os comandos apropriados. A lista está abaixo.
Etapa 9 Configuração do computador (se necessário)
Se necessário, ou apenas conveniência para controle, você pode usar um computador ou laptop. Para fazer isso, o computador deve ter Bluetooth. Estabelecemos comunicação com nosso módulo através dos controles no computador. Em seguida, precisamos de um terminal para enviar comandos. Qualquer conveniente para você.Após gravar o firmware, o controle é realizado pelos seguintes botões (comandos):
W - encaminhar
S - de volta
A - esquerda
D - direita
F - parar
G - volante
K - faróis
L - farol desligado
A inserção constante de comandos é inconveniente, por isso recomendo o uso do programa para enviar comandos. Estou usando o Z-Controller. No programa, selecione a porta (porta com a qual a conexão é estabelecida) e configure as chaves para os comandos. Configure ocioso e intuitivo.
