
Eu quero construir algo como um ATV leve ou similar com base em um motor de ciclomotor.
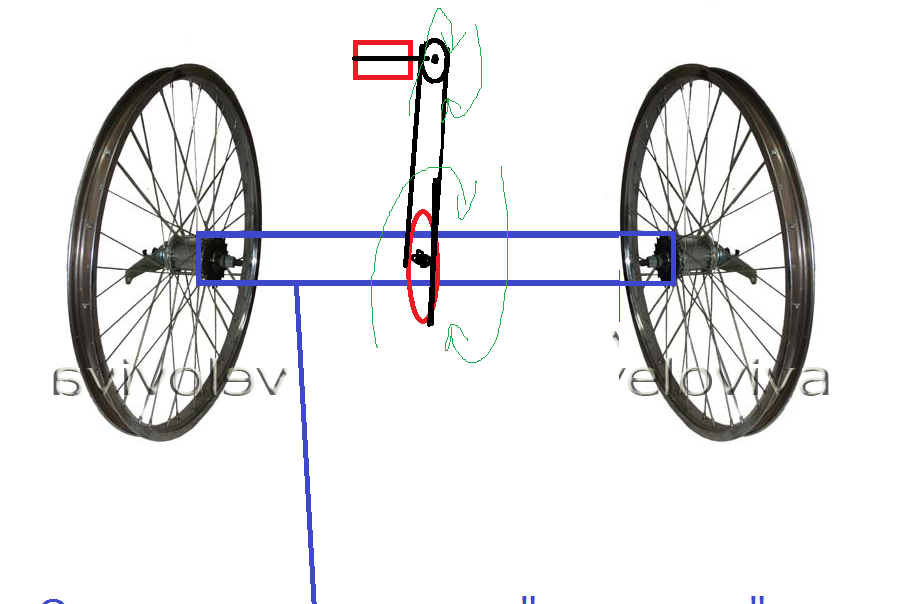
Estou pensando em como fazer um análogo do diferencial. E se você pegar as duas rodas traseiras da bicicleta e soltar o eixo nas "rodas dentadas".
Teoricamente, ao dirigir em um eixo reto, o eixo será bloqueado por si só, e isso é legal, pois haverá boa capacidade de cross-country, apenas uma roda não irá girar em caso de obstrução.
Ao girar (digamos à esquerda), a roda direita "desconecta" do eixo, pois gera um número maior de rotações, e a roda esquerda transmite torque do motor. MAS! Acontece o oposto, o torque para uma curva melhor que precisamos na roda direita.
Embora neste caso não haja "bloqueio de ponte" e o ATV deva girar normalmente?
Embora, se você imaginar a situação em que paramos, girou o volante e partiu, até o momento do movimento duas rodas entrarem em vigor imediatamente e, ao dirigir, uma é desconectada. Em geral, como na minha opinião, a ideia é pelo menos única))