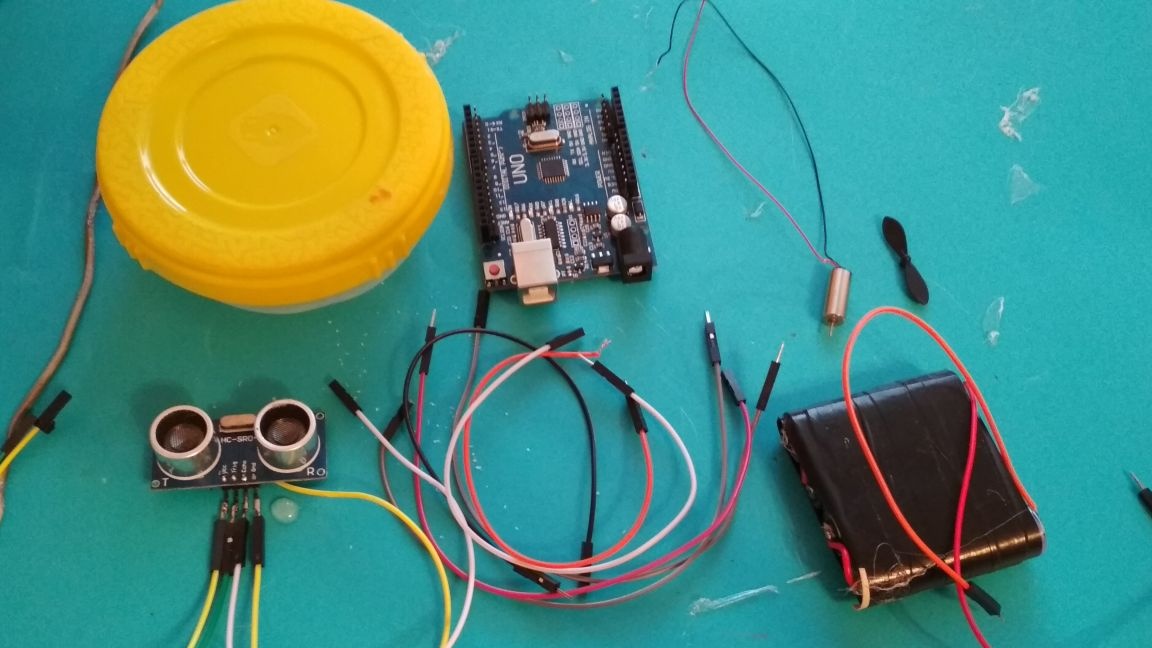
E assim, para um ventilador automático, precisamos:
pagamento Arduino uno (tirou aqui)
motor de baixa tensão
-Fios tipo papai-mãe
- Fios convencionais
mudar
ultrassom
recipiente de plástico
- hélice pequena
- um parafuso com cerca de 5 cm de comprimento e 1 cm de largura
porca ao parafuso
- Bateria de 6-12 volts (eu uso 4 baterias de 1,5V conectadas em série às quais dois fios mãe-mãe são soldados com a saída mãe cortada
fio grosso
Das ferramentas que precisamos:
ferro de solda
pistola de cola
faca de escritório
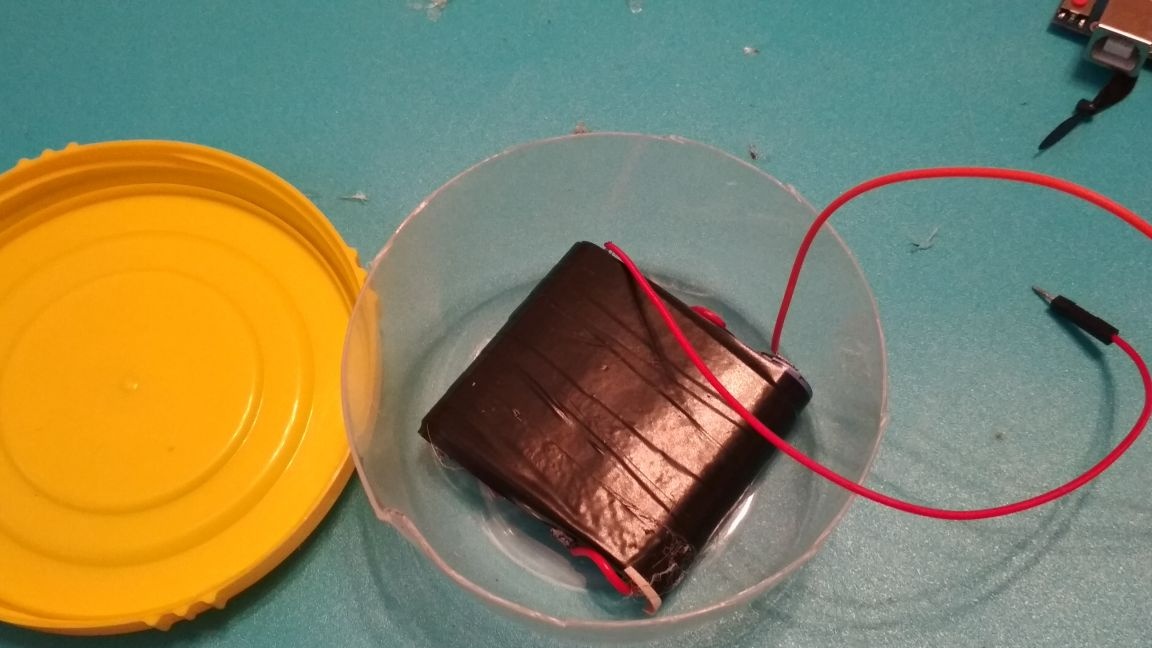
Então, primeiro de tudo, pegamos nossa fonte de energia e a colocamos no fundo do contêiner (eu uso o contêiner de preço fixo de 16 bits que eu gosto)
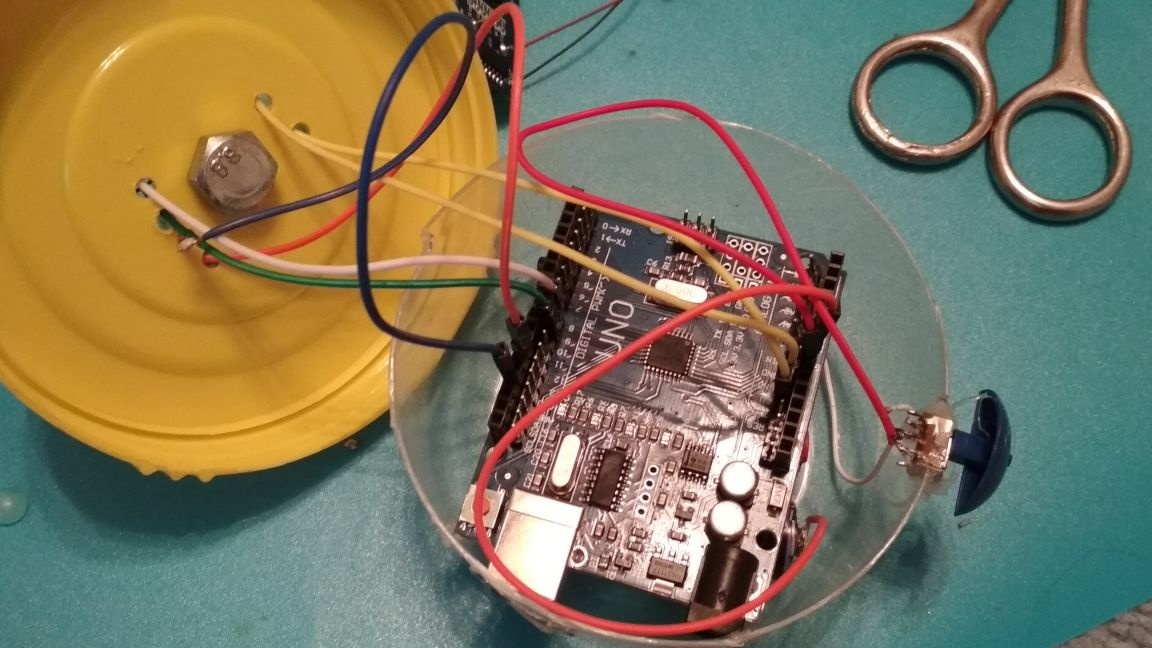
Em seguida, colocamos a placa do Arduino Uno no topo:

Como a placa sai muito, marque 2 furos para os conectores e corte-os:

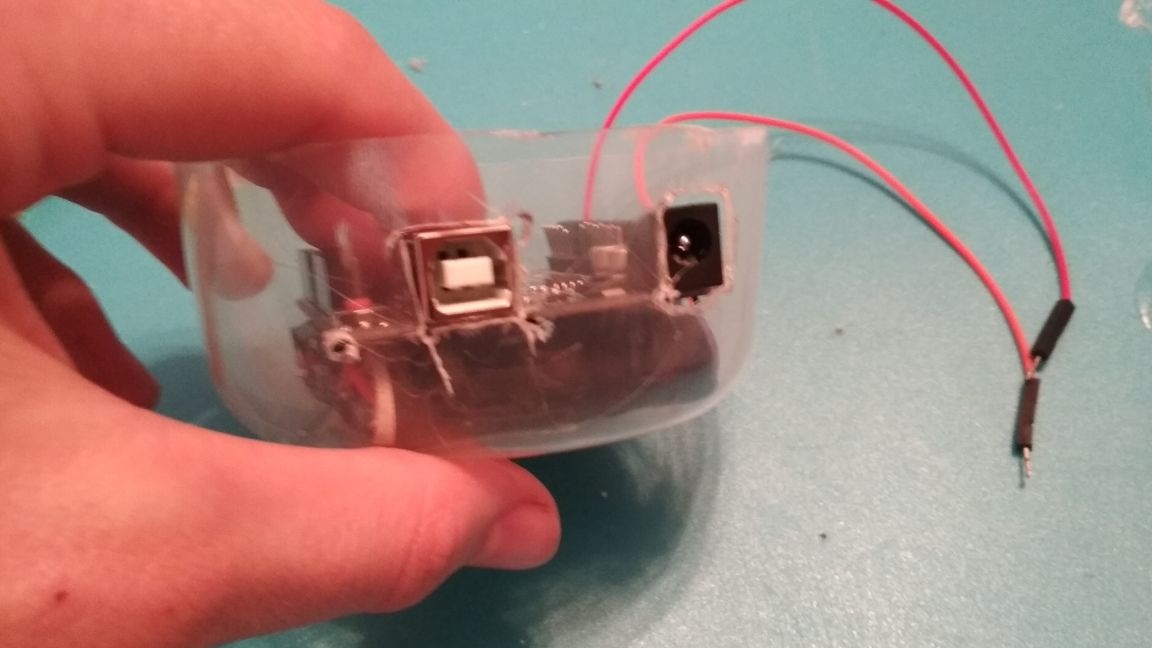
Adicione um switch à fonte de alimentação, depois conecte a alimentação positiva à saída uin no arduino e menos ao Gnd:
No lado do recipiente (também na tampa, se necessário), faça um sulco para o interruptor e cole-o lá:
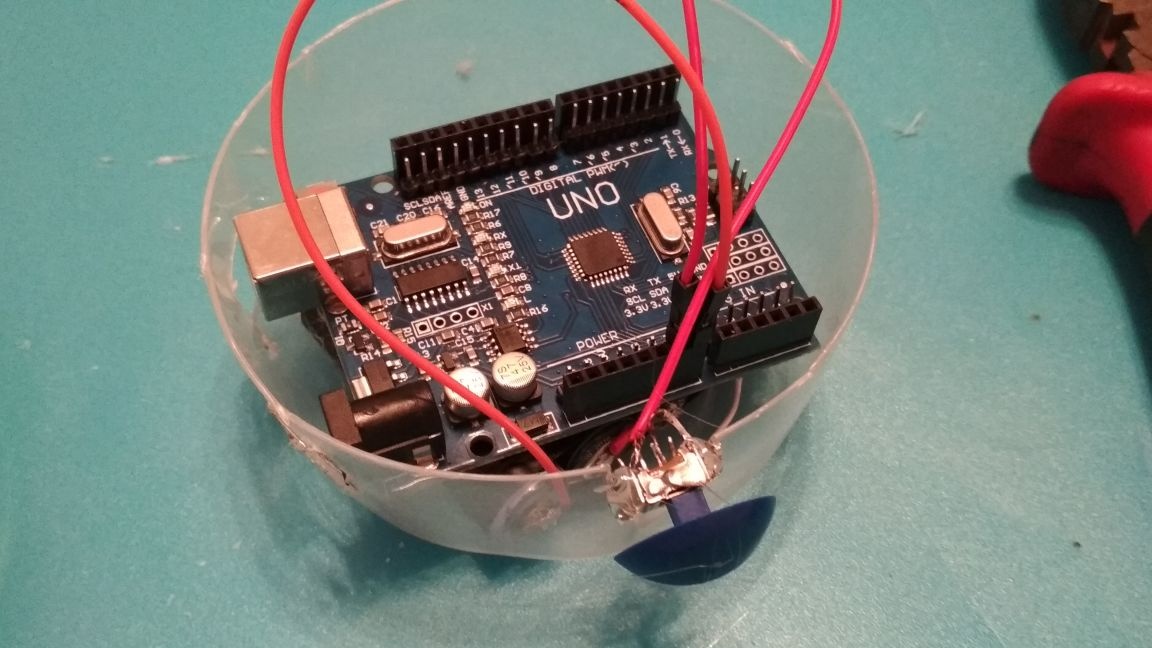
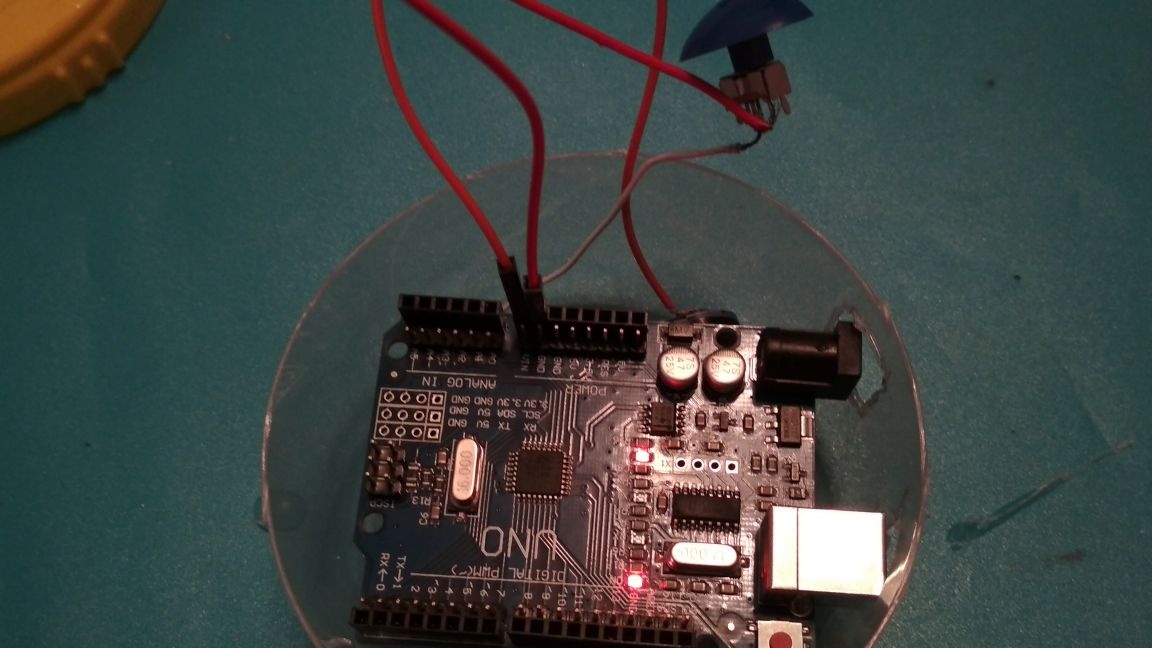
se os LEDs vermelhos na placa do Arduino acenderem quando o interruptor for ligado, conectamos a energia corretamente.
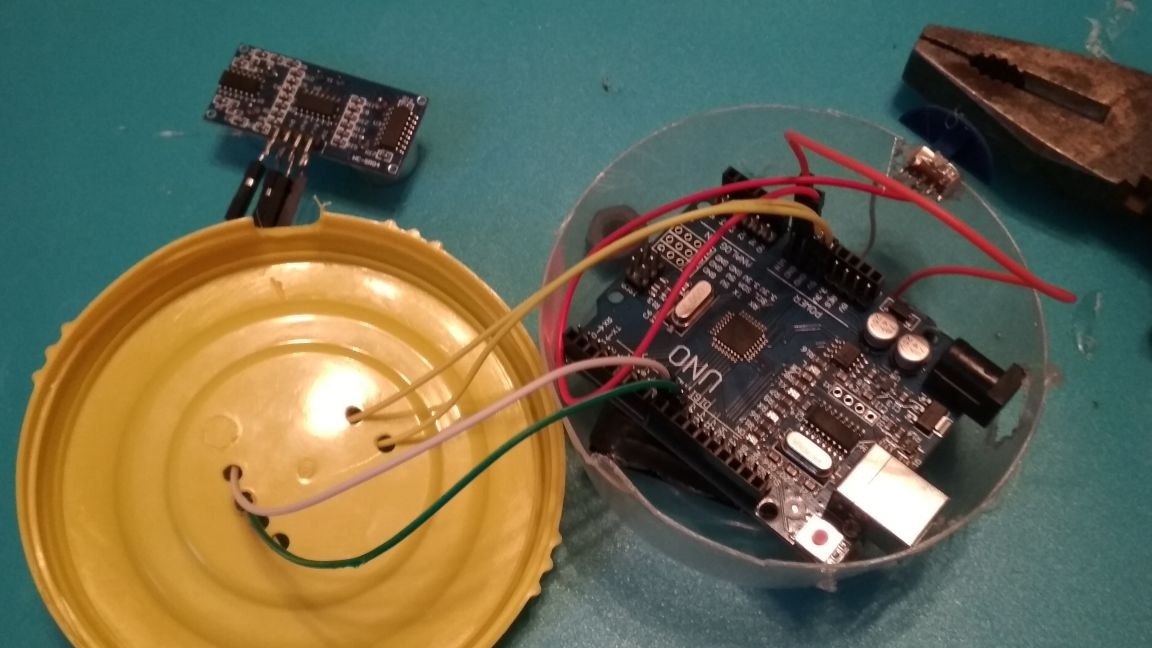
Levamos um telêmetro ultrassônico e soldamos às suas saídas (vcc, Echo, Trig, Gnd) fios do tipo pai e mãe

Na tampa do recipiente, fazemos 6 pequenos orifícios, 2 sob os fios do motor, 4 sob os fios do sensor ultrassônico:

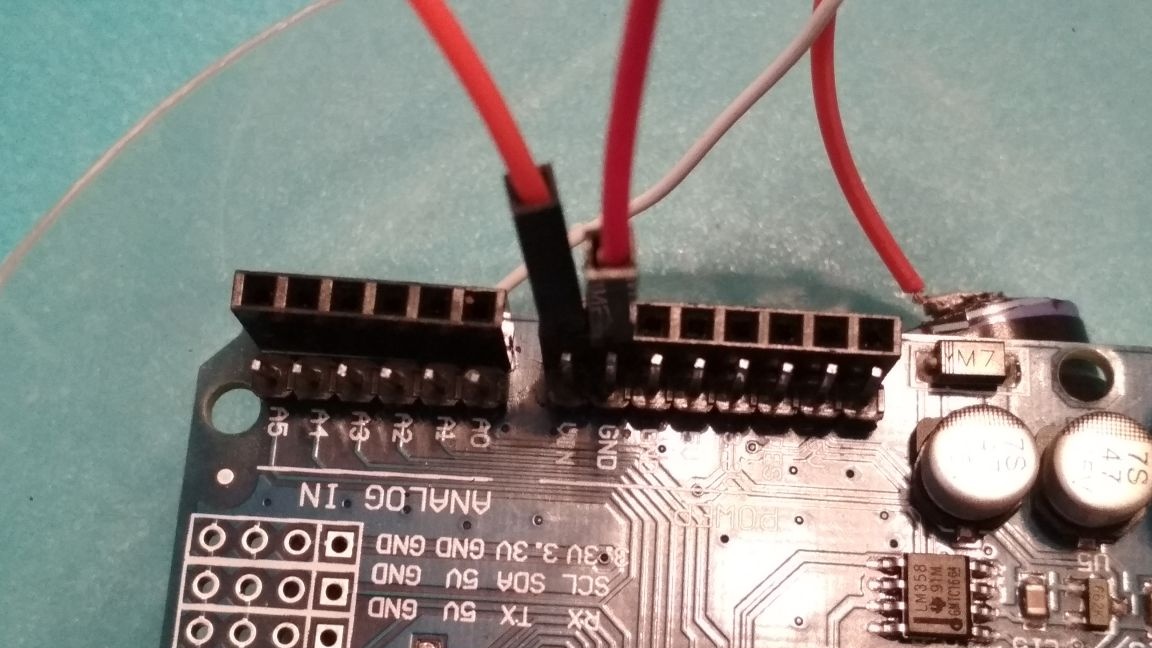
Passamos os fios do sensor pelos orifícios da tampa e os conectamos da seguinte forma na placa do arduino: vcc na saída 5 v, Gnd em Gnd, eco em 9 pinos digitais e trig em 8
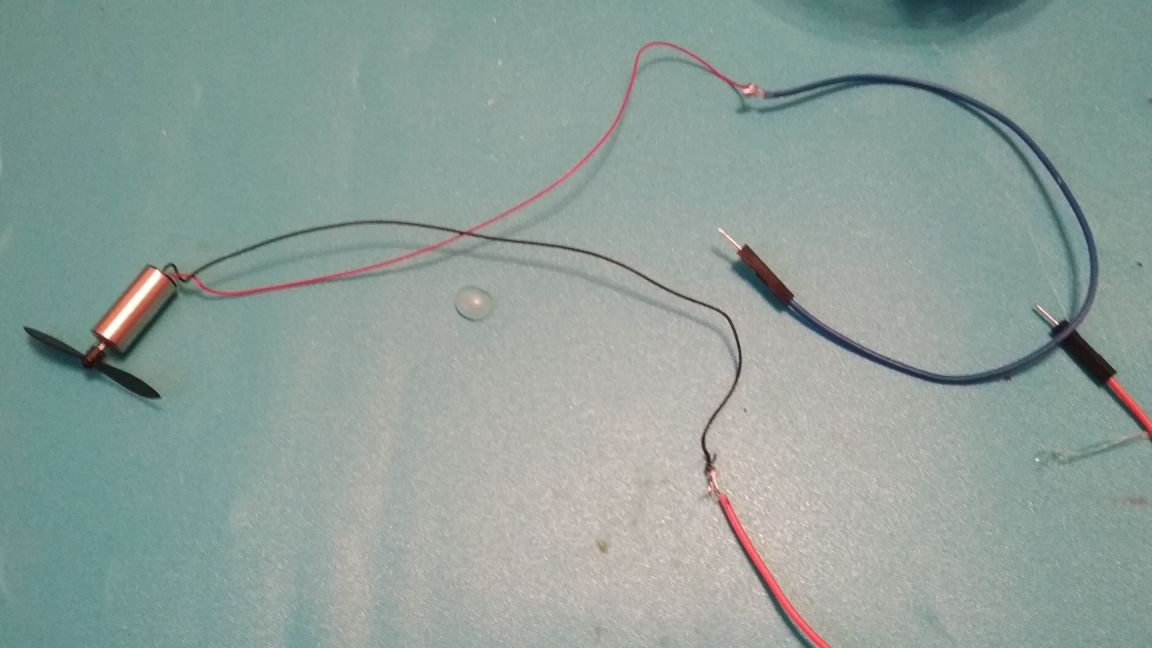
Colocamos uma hélice no eixo do motor, usarei uma pequena de fábrica, pois não há outra, mas é melhor usar uma hélice maior, ou mesmo caseira:
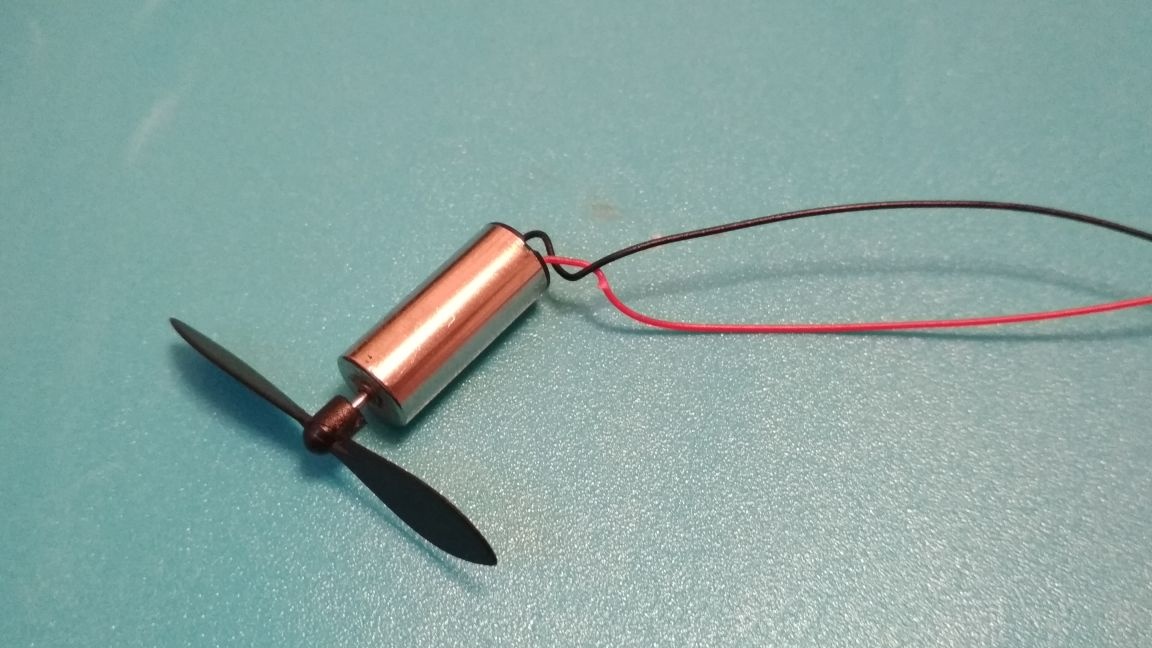
Solde dois fios do pai para a mãe no motor com uma "mãe" de saída pré-cortada
Passe os fios do motor pelos orifícios restantes da tampa:

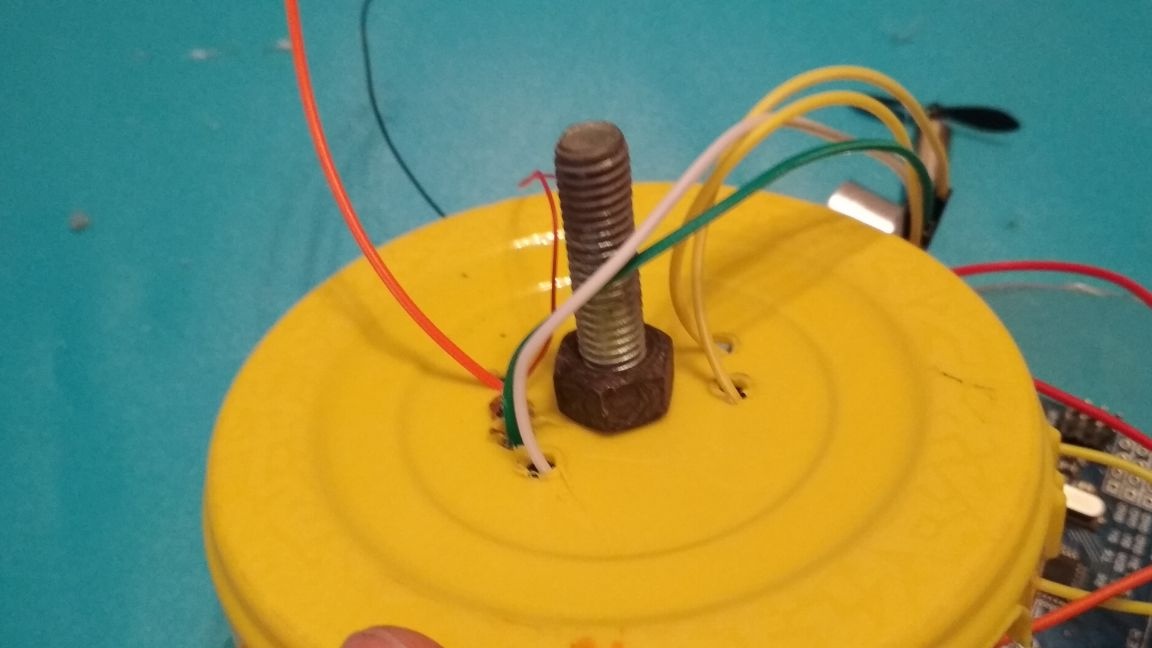
Tomamos um parafuso com uma porca e, usando uma broca escalonada ou um ferro de solda, fazemos um furo na tampa para o diâmetro do parafuso:


Insira o parafuso de baixo para cima e aperte a porca:
Conectamos um fio do motor à saída Gnd na placa arduino e o outro ao 10º pino:
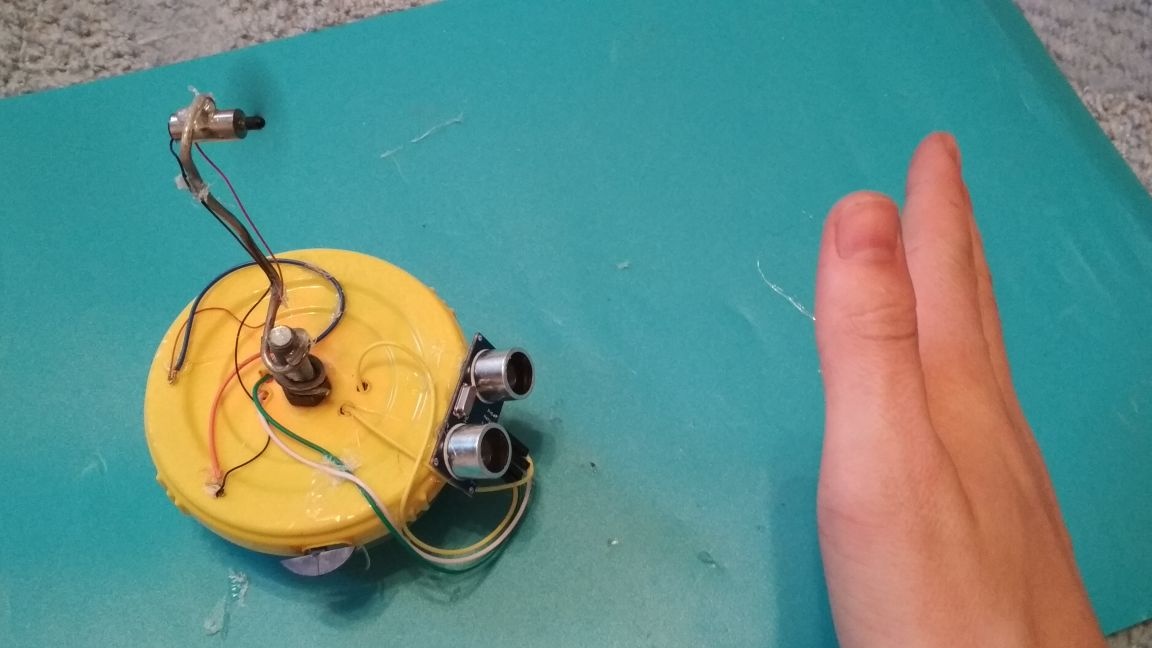
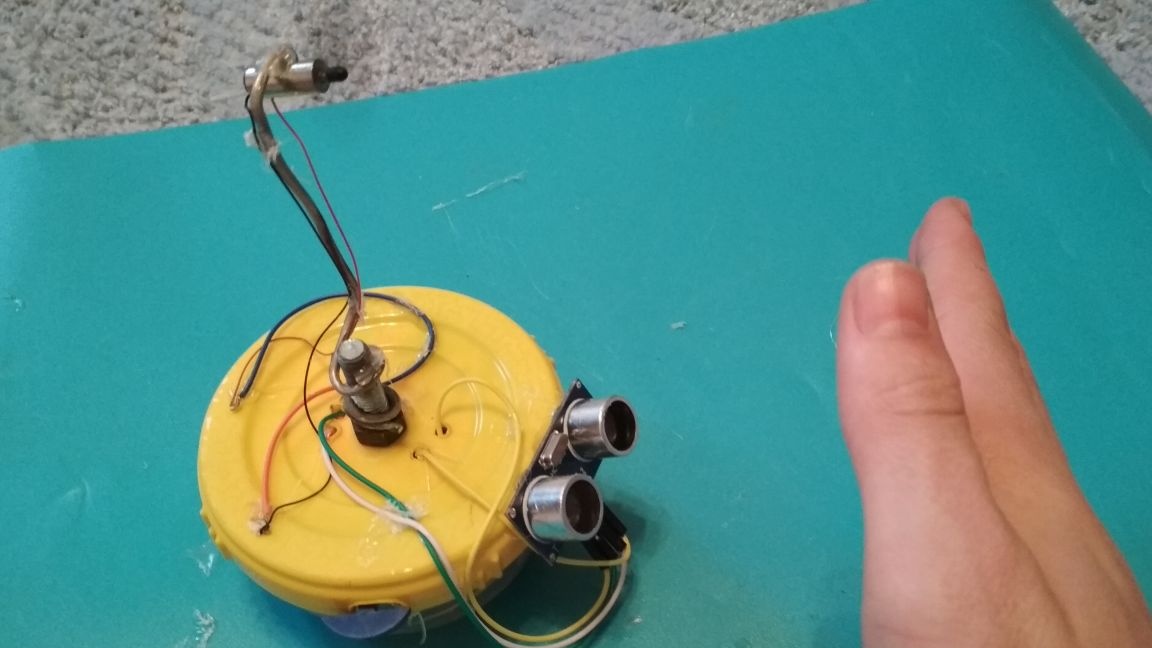
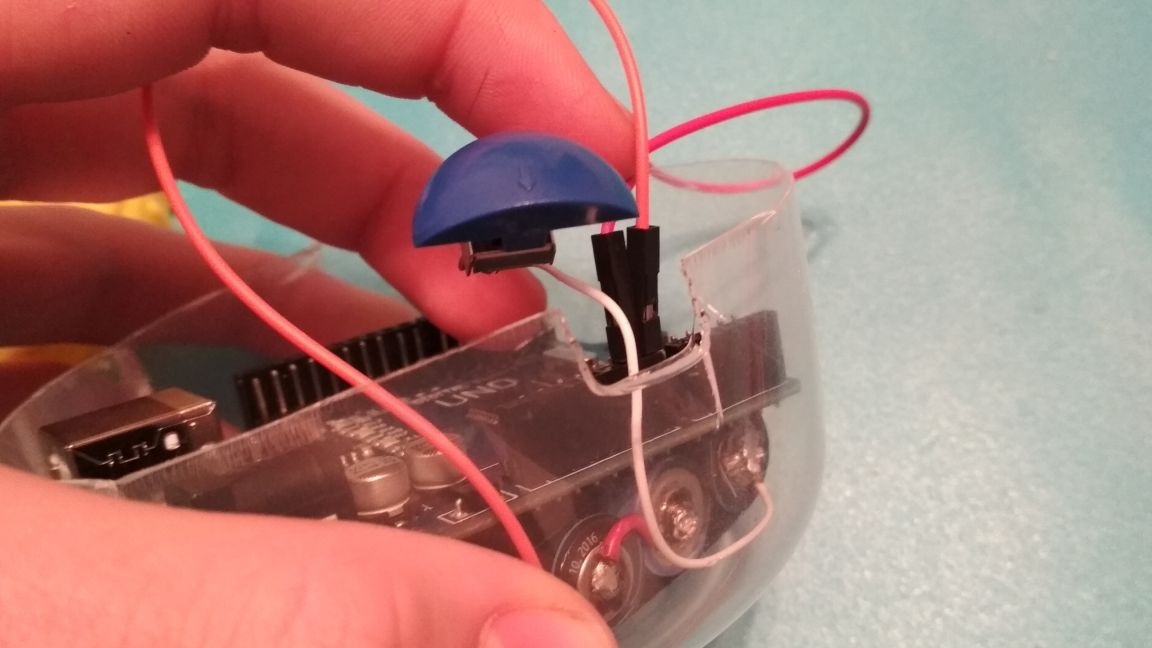
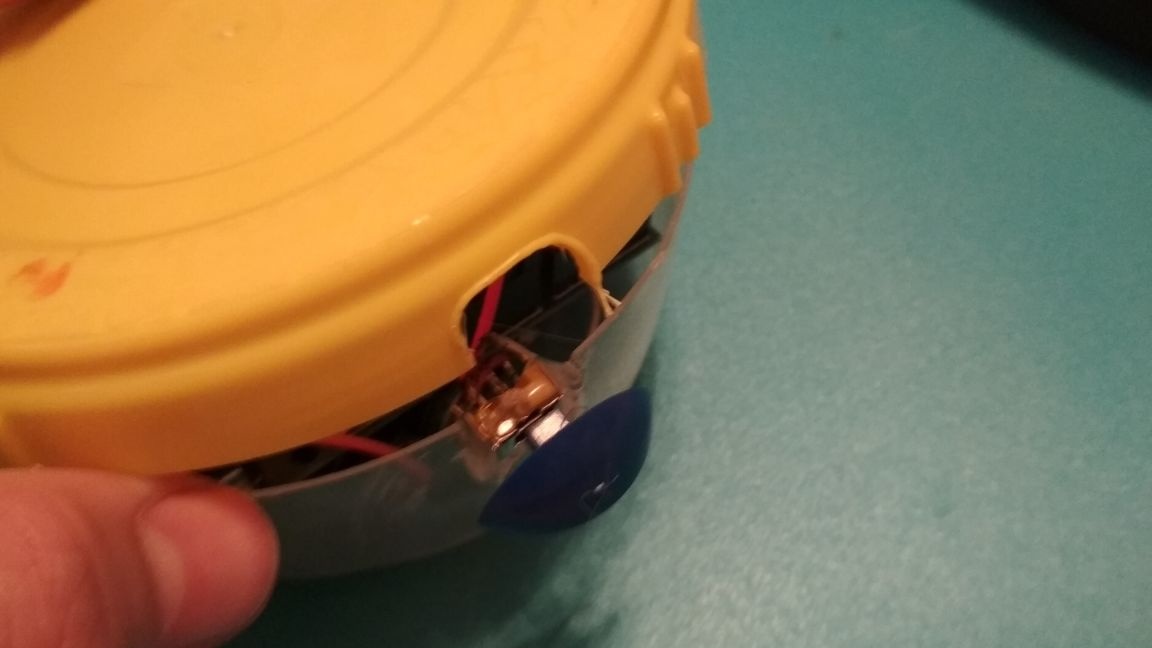
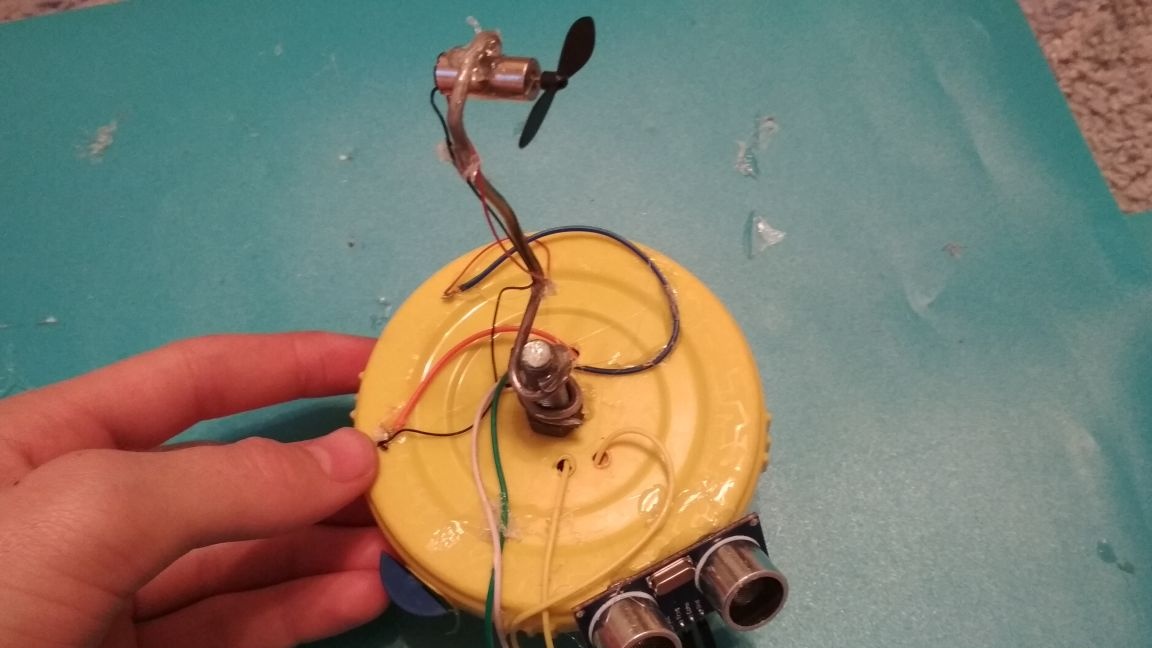
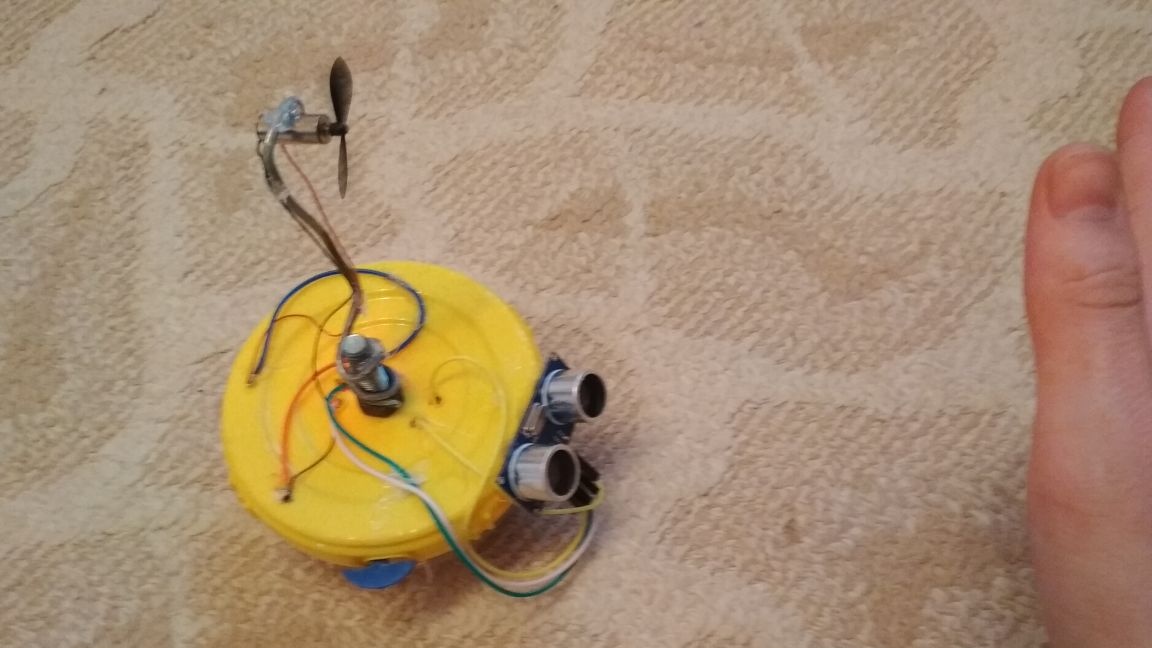
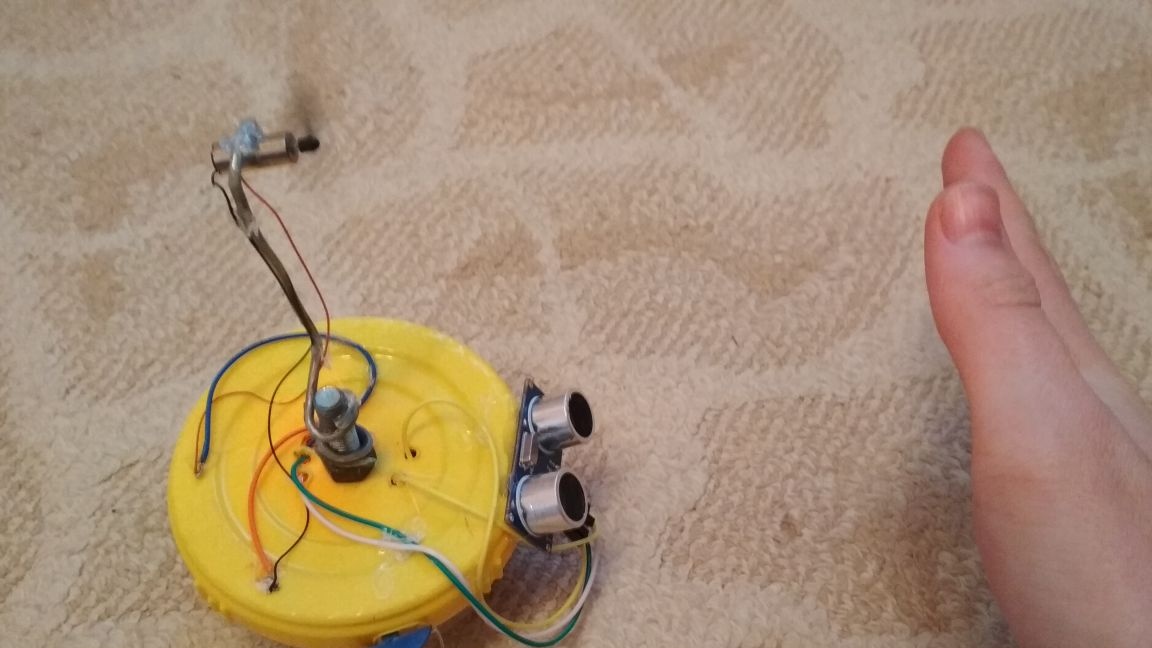
Colocamos a tampa e colamos o telêmetro ultrassônico, como mostrado na foto, também cola todos os fios pendentes:
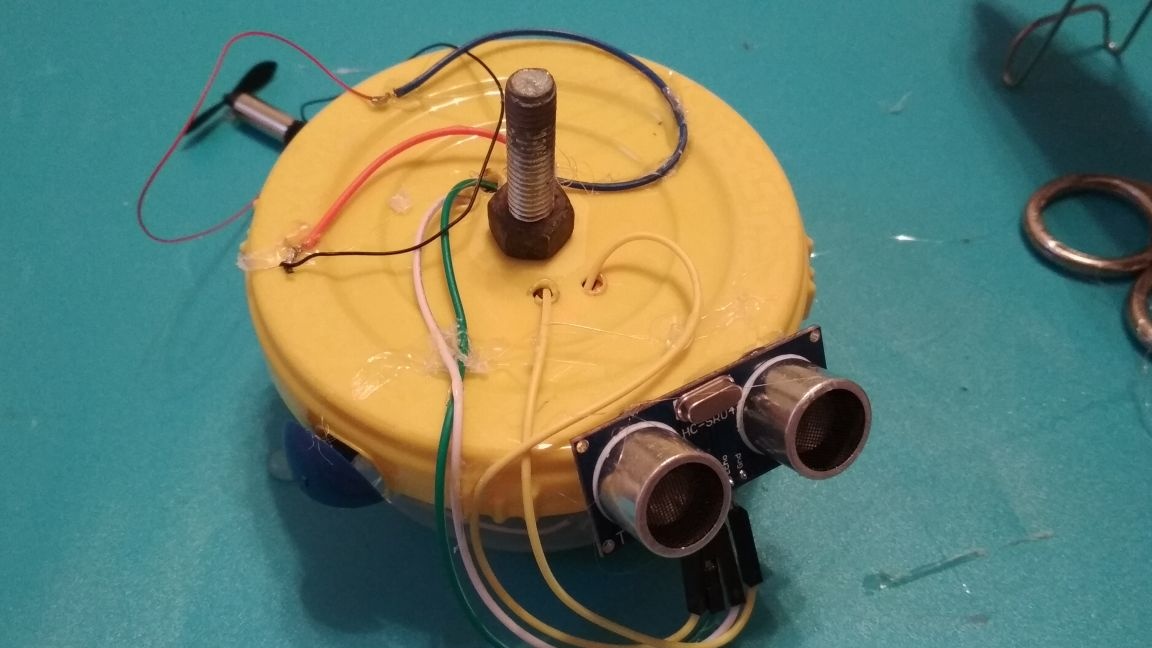
Enrolamos e colamos um fio grosso no parafuso:
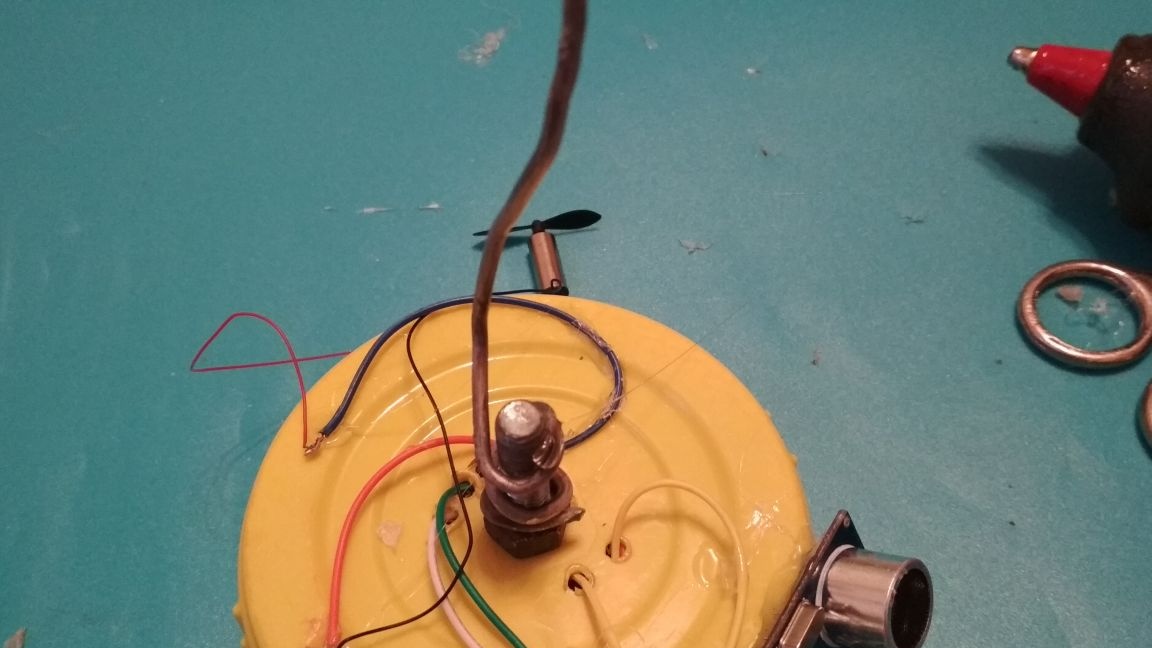
Fixamos nosso motor na parte superior do fio, o fio atuará como um guia ajustável:
Agora chegou a hora, para mim, pessoalmente, a etapa mais difícil, ou melhor, para escrever o firmware, você não precisa escrever nada, basta iniciar o aplicativo Arduino IDE, conectar a placa Arduino ao computador usando um adaptador especial que geralmente acompanha a placa, copiar o esboço no IDE do Arduino, que é dado abaixo, no programa, clicamos no botão "download", após o qual o esboço deve ser carregado na placa do arduino.

Se tudo for feito corretamente, quando o objeto estiver mais próximo do que 20 cm do sensor ultrassônico, a hélice deverá começar a girar. Desconectamos nosso design do computador e testamos nosso dispositivo já de nossa fonte de energia. Para isso, simplesmente mudamos a chave do estado desligado para o estado ligado
Esboço (neste esboço, o motor é chamado de palavra led):
int echoPin = 9;
int trigPin = 8;
int led = 10;
configuração nula () {
Serial.begin (9600);
pinMode (trigPin, OUTPUT);
pinMode (echoPin, INPUT);
pinMode (led, OUTPUT);
}
loop vazio () {
int duração, cm;
digitalWrite (trigPin, LOW);
delayMicrosegundos (2);
digitalWrite (trigPin, HIGH);
delayMicrosegundos (10);
digitalWrite (trigPin, LOW);
duração = pulso (echoPin, HIGH);
cm = (duração / 58) +3;
Serial.print (cm);
Serial.println ("cm");
// delay (1000);
if (cm & lt; 20) {
digitalWrite (led, ALTO);
} mais {
digitalWrite (led, LOW);
}
atraso (100);
}Bem, é isso! Nosso ventilador automático ou inteligente está pronto! Você pode não acreditar, mas mesmo uma hélice tão pequena sopra muito bem a uma distância de 50 cm, mas o ideal é usar uma hélice maior e um motor com um número maior de rotações (usei baixa tensão devido ao consumo de corrente muito baixo). Espero que isso caseiro útil para alguém.