


Então, vamos começar. Primeiro você precisa decidir sobre os componentes e circuitos. O princípio de operação do circuito é simples: um sinal fraco do microfone é amplificado e enviado ao pino analógico do Arduino. Como amplificador, usarei um amplificador operacional (comparador). Ele fornece um ganho muito maior em comparação com um transistor convencional. No meu caso, o chip LM358 servirá como esse comparador, ele pode ser encontrado literalmente em qualquer lugar. E custa muito barato.
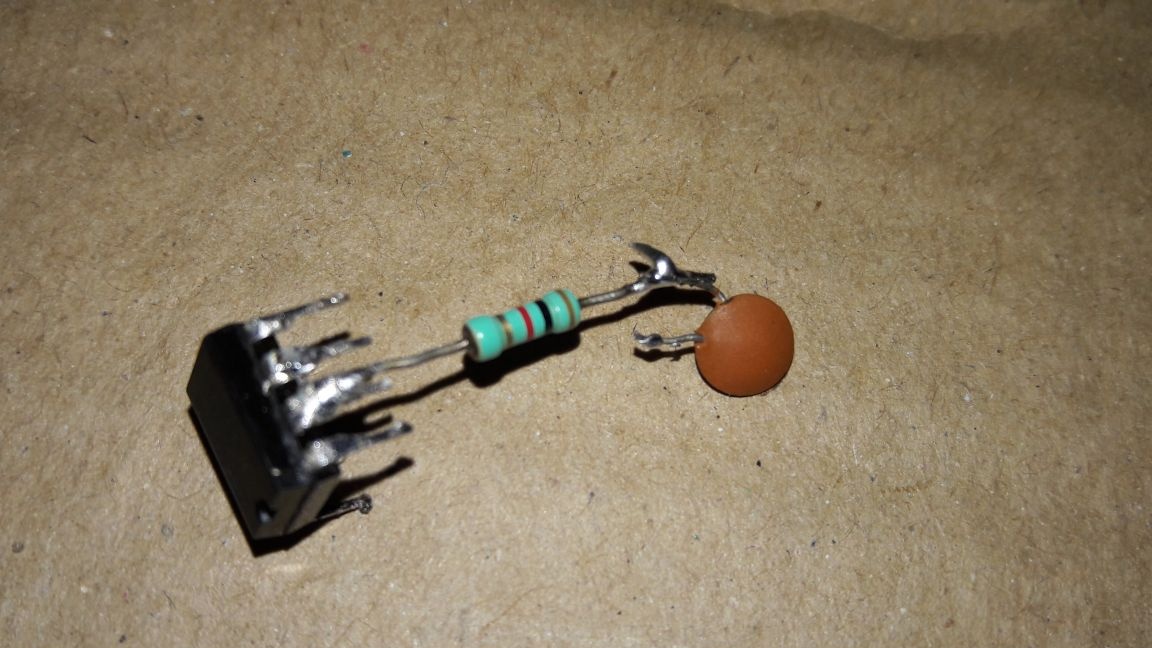
Se você não conseguiu encontrar o LM358, então pode colocar qualquer outro amplificador operacional adequado. Por exemplo, o comparador mostrado na foto estava na placa do amplificador do sinal do receptor infravermelho na TV.

Agora vamos ver o circuito do sensor.
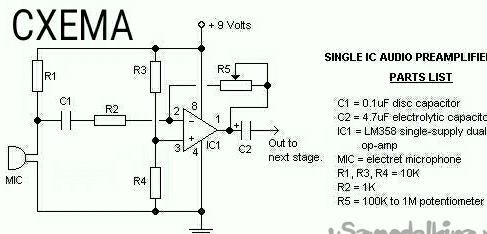
Além do amplificador operacional, precisaremos de alguns componentes mais facilmente acessíveis.
O microfone mais comum. Se a polaridade do microfone não for indicada, basta olhar para seus contatos. O menos um sempre vai para o caso e, no circuito, consequentemente, é conectado ao "terra".

Em seguida, precisamos de um resistor de 1 kΩ.
Três resistores de 10 kΩ.

E outro resistor de 100 kΩ é 1 MΩ.
No meu caso, um resistor de 620 kOhm é usado como a "média de ouro".
Mas, idealmente, você precisa usar um resistor variável com a classificação apropriada. Além disso, como mostrado em experimentos, uma classificação maior apenas aumenta a sensibilidade do dispositivo, mas mais "ruído" aparece.

O próximo componente é um capacitor de 0,1 uF. Está rotulado como "104".

E outro capacitor, a 4,7 uF.
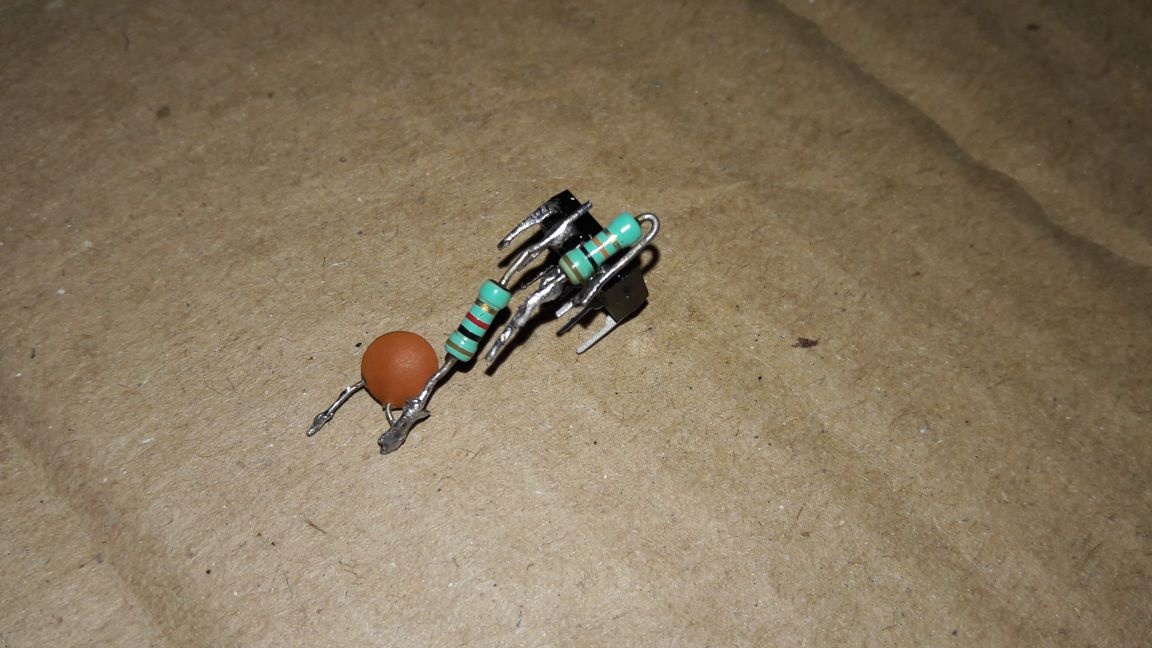
Agora vamos para a montagem. Montei o circuito com uma instalação montada.








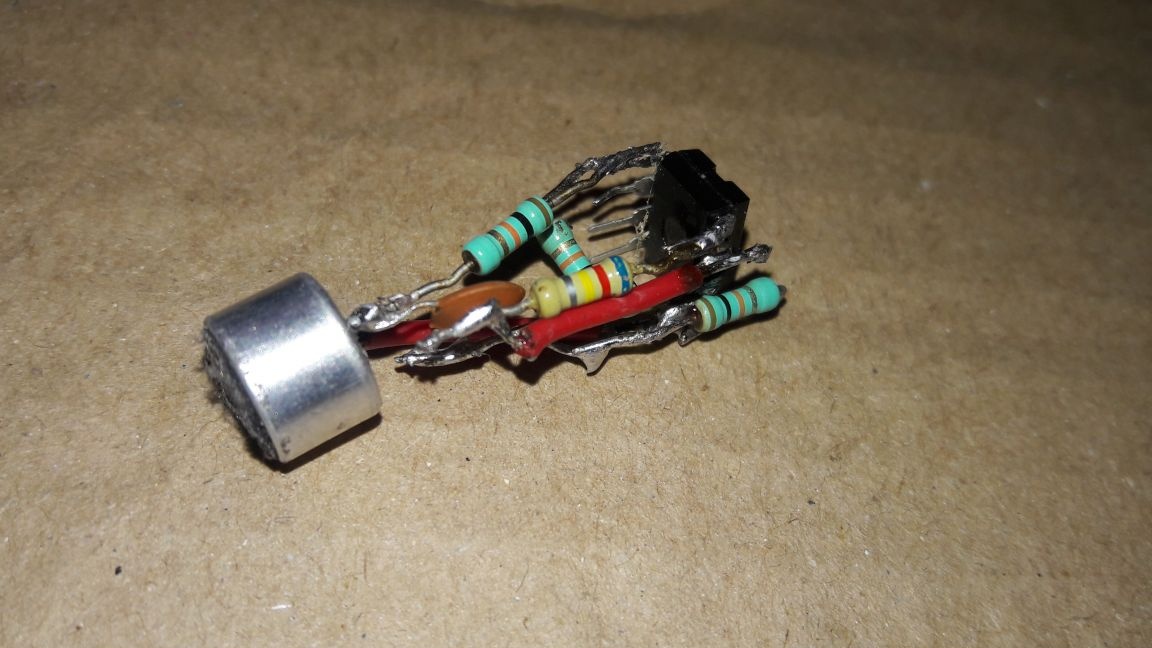

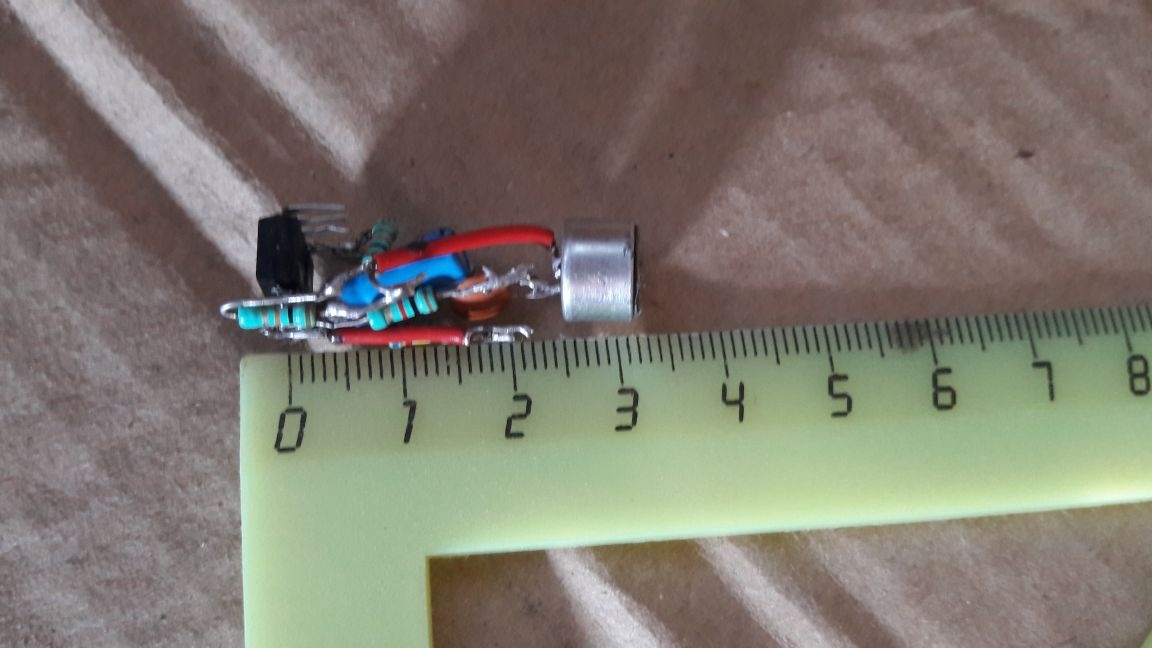
Montagem concluída.Eu instalei o circuito em um gabinete que fiz de um pequeno pedaço de tubo de plástico.
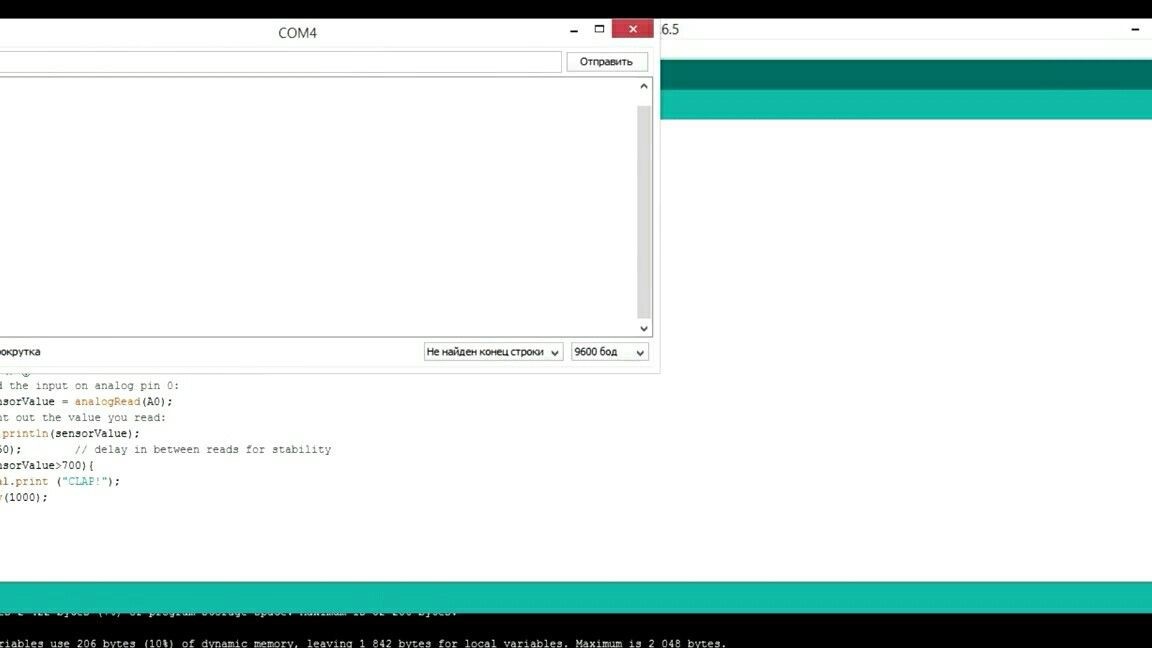
Prosseguimos para testar o dispositivo. Vou conectá-lo ao quadro Arduino UNO. Passamos para o ambiente de desenvolvimento do Arduino e abrimos o exemplo AnalogReadSerial na seção Basics.
configuração nula () {
Serial.begin (9600); // conecta a conexão serial em 9600 baud
}
loop vazio () {
int sensorValue = analogRead (A0); / * leia o valor do pino analógico zero e salve-o na variável sensorValue * /
Serial.println (sensorValue); // gera o valor para a porta
atraso (1); // aguarde um milissegundo pela estabilização
}Antes de carregar na placa, alteramos o atraso em 50 milissegundos e carregamos. Depois disso, fazemos um algodão de teste e seguimos as indicações. No momento do aplauso, eles pulam, tentam se lembrar desse valor aproximadamente e retornam ao esboço.
Adicione algumas linhas ao esboço.
if (sensorValue> X) {
Serial.print ("CLAP");
atraso (1000);
}Em vez de "X", insira o mesmo valor, carregue e aplaude novamente. Portanto, continue até encontrar o valor de resposta ideal. Com um valor superestimado, a condição será cumprida apenas com algodão a uma distância muito próxima. Com um valor mais baixo, a condição será satisfeita ao menor ruído ou ao som de passos.
Além disso, com a seleção correta do resistor R5, esse sensor pode se transformar em digital e pode ser usado em interrupções de hardware. O potencial desse design é enorme, pois você pode montar vários projetos e sua simplicidade torna o dispositivo acessível a todos.
Em conclusão, proponho assistir a um vídeo em que tudo é claramente mostrado. O processo de calibração e a montagem do comutador de algodão mais simples também são explicados com muito mais detalhes.
Espero que tenham gostado. Desejo-lhe uma montagem bem sucedida!