

O autor baseou este projeto em uma versão mais simples. caseiro barcos, e aperfeiçoou-o. Os sensores são colocados no barco para evitar obstáculos e se mover para a luz. Como o controlador no barco é usado ArduinoUm sensor ultrassônico é instalado na frente e os sensores de luz estão localizados nas laterais. Este barco simples não bate nas paredes e é controlado por uma lanterna.
Materiais e ferramentas:
- Fita isolante / fita adesiva
- Thermoglue com cola quente
- Motores DC 2 peças
- Garrafas de plástico 2 peças
- fios
- Hélices pequenas 2 peças
- Arduino, computador e cabo USB
- Caixa plástica
- Bateria e conector de 9V
- Diodos de potência (tipo 1N4004)
- Resistores
- MOSFET do transistor ou DICA 120
- Duas fotocélulas e dois botões
- tesoura
- Solda com ferro de solda

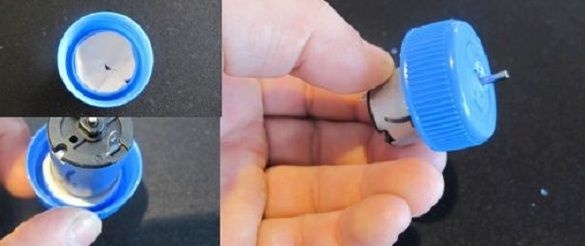
Etapa 1. Instalando Motores.
As tampas são removidas das garrafas e é feito um orifício em cada uma delas. Dentro da capa, o autor aperta cola quente sem fechar os furos. Ele colocou o eixo do motor no buraco e colocou na cola. Depois que a cola seca, o eixo gira livremente. O mesmo procedimento ocorre com a segunda tampa.
Etapa 2. Colocando as Garrafas.
As garrafas foram presas juntas pelo princípio de uma balsa com a ajuda de três tiras de fita adesiva.

Etapa 3. Solda aos motores.
Como os motores montados nos plugues não tinham fios, era necessário soldá-los, o comprimento dos fios era de cerca de 25 a 30 cm.

Etapa 4. O corte nas garrafas.
Para que os fios caiam no casco do barco, é feita uma pequena fenda do lado superior.

Etapa 5. Prendendo os motores.
Além disso, o autor torce as tampas das garrafas, uma vez que elas não torceram bem; eu tive que usar cola quente. Os fios são empurrados através dos orifícios preparados nas garrafas.

Etapa 6. Caso.
Uma caixa de plástico gruda em duas garrafas. Nesta capacitância para a eletrônica, você pode fazer orifícios para os fios ou segurá-los pela parte traseira da caixa. Os orifícios para os fios nas garrafas são isolados com adesivo hot melt.

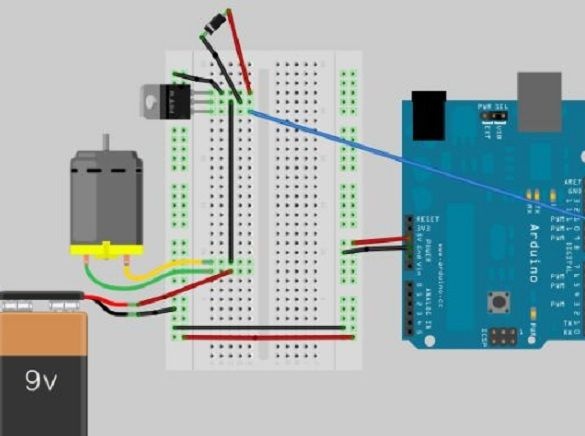
Etapa 7. Diagrama de fiação.
O circuito usa um transistor TIP 120 como um comutador (você pode usar transistores MOSFET ou Darlington similares). É usado para alternar a carga ao consumir uma grande quantidade de corrente, pois o Arduino não possui energia suficiente para os motores. Este circuito é montado para o primeiro e, em seguida, para o segundo mecanismo (outra bateria não é necessária para o segundo motor).
Etapa 8. Sensores.
O sensor ultrassônico é ótimo para a frente do barco, alerta para obstáculos no caminho. As fotocélulas agem como antenas e são usadas para fazer o barco flutuar na luz.Os botões nas laterais são usados como sensores de obstáculos. Você também pode modificar o código e usar outros sensores, como infravermelho.

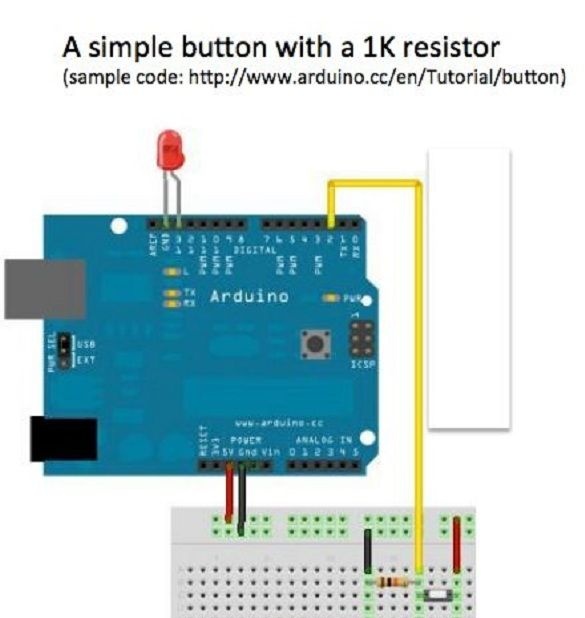
Etapa 9. Esquemas para sensores.
O diagrama mostra a conexão de um botão simples e um resistor de 1K. O esquema para os dois botões é repetido, os botões são colocados nos dois lados do barco. Eles serão responsáveis por alterar o movimento do barco em uma colisão.
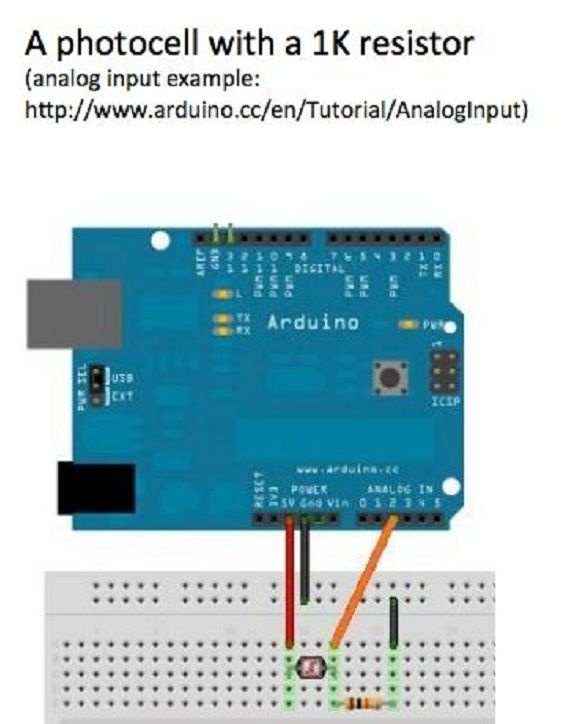
A figura a seguir mostra um circuito com um resistor de 1K e fotocélula. O autor realizou duas vezes e colocou as fotocélulas em lados opostos do barco.
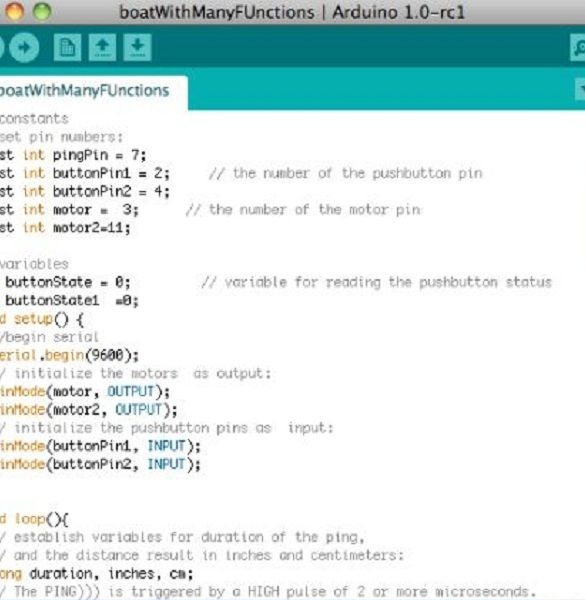
Etapa 10. Código do programa.
O autor ofereceu a oportunidade de fazer o download do seu código para uso, fornecendo funcionalidade básica para aqueles que montam esse barco. O código inclui suporte para fotocélulas, telêmetro e botões. O barco tentará evitar obstáculos à sua frente e vira na direção oposta quando encontra obstáculos laterais. Se não houver desejo de usar todo o conjunto de sensores, mas apenas alguns deles terão um código para cada um separadamente. Você pode baixar todos os códigos do artigo.
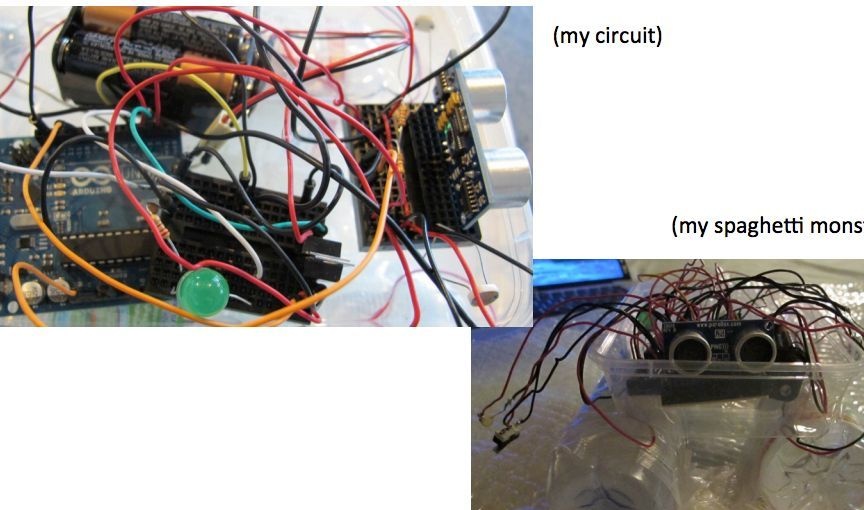
Etapa 11. Montagem do barco.
Circuito montado, Arduino e baterias são in a box.
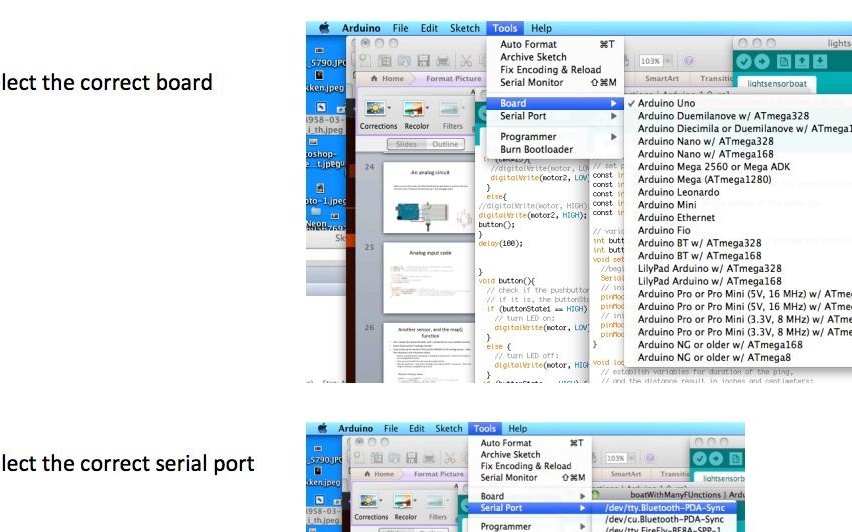
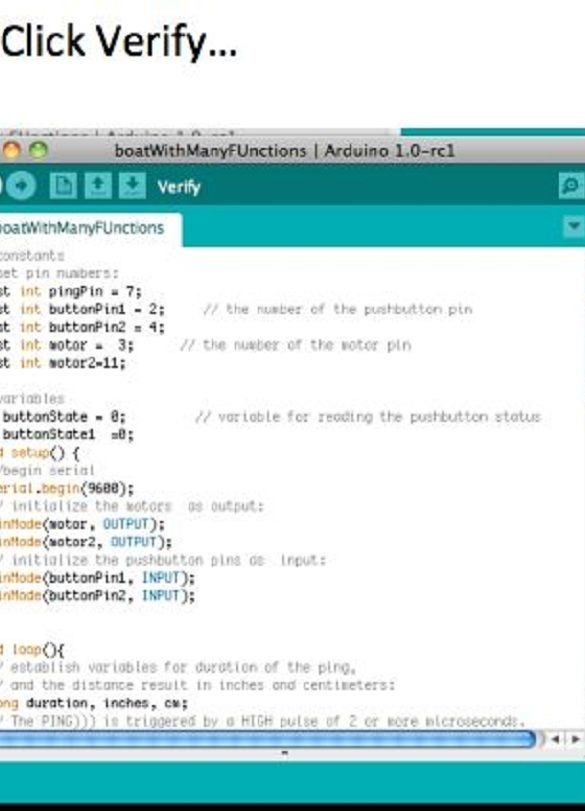
Etapa 12. Faça o download do esboço.
Em seguida, o IDE do Arduino é aberto, escolhendo o arquivo e a porta corretos, após o qual o autor compilou e carregou o código no controlador.
Etapa 13. Resistente à água e teste.
O autor também isolou todos os locais potenciais de entrada de água com cola quente. Também isolou todos os fios do curto-circuito. O contêiner com o Arduino é coberto com a mesma caixa e selado com fita isolante. As hélices são conectadas aos motores. Aqui o barco está pronto, agora você pode começar a testar na água.



Vídeo com um teste preliminar do barco: