
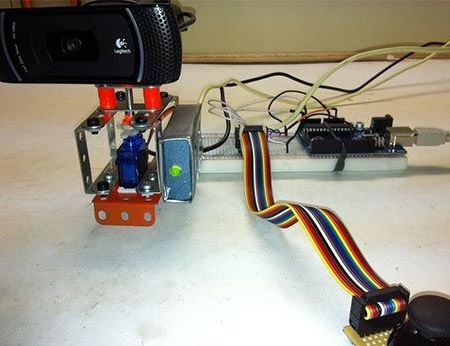
Este artigo irá falar sobre como usar Arduino pode controlar a webcam. Mais precisamente, o controle será um servo drive, que é instalado no quadro pelo designer no qual a webcam já estará montada.
Materiais usados pelo autor para criar este dispositivo:
1) construtor de metal
2) soldagem a frio
3) webcam
4) servo
5) LEDs
6) Arduino
8) joystick do PS3
Considere com mais detalhes o design e os pontos principais da criação de um dispositivo para controlar a câmera.
Intrigado com a questão de como usar uma plataforma Arduino tão conveniente, além de funções padrão, como luzes piscantes. Depois de ter uma conversa via Skype com um colega de trabalho, o autor teve uma ideia interessante. E se você der aos colegas a oportunidade de controlar uma webcam e assistir ao que está acontecendo no escritório. Assim que foi dito, o autor começou a trabalhar na implementação dessa idéia.
Inicialmente, o autor estudou os principais materiais dos artigos em que um joystick era usado para controlar as unidades criadas na plataforma Arduino. Tendo compreendido o material desses artigos, o autor percebeu que poderia usar o joystick antigo do PS3 para controlar os movimentos do servo dele.
Começando a construir, o autor decidiu construir um quadro no qual o servoconversor e a própria câmera serão colocados. Para não complicar a tarefa, o autor decidiu usar o habitual construtor de metais, que comprou em um brechó.
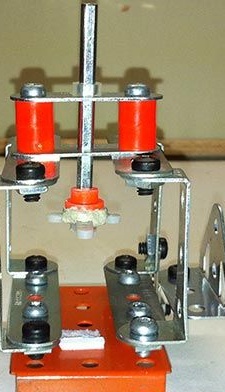
Tomando os detalhes desse construtor, ele acabou criando um quadro do futuro dispositivo:
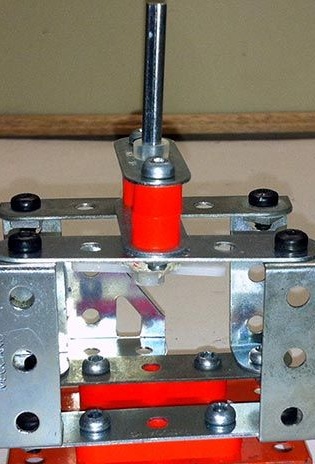
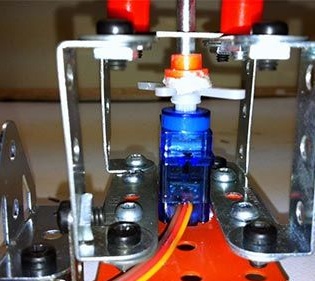
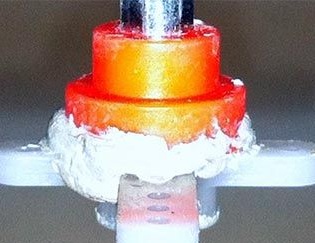
Um servoconversor foi instalado dentro da estrutura. Como pode ser visto na foto, ele se encaixa perfeitamente no quadro criado. Para fixar o servo no quadro, o autor utilizou fita dupla face. Utilizando solda a frio, o eixo servo foi conectado à engrenagem, que controla o movimento da plataforma com a câmera.
É importante garantir que o design da transmissão seja feito mesmo para que não haja carga desnecessária.
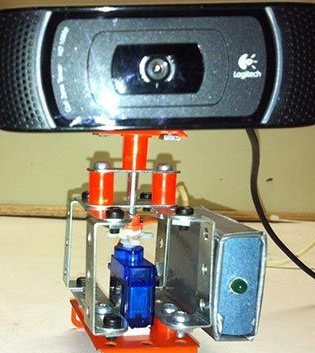
Então o autor começou a instalar a webcam. Foi usada uma câmera Logitech, usada no escritório da empresa em que o autor trabalha. Portanto, devido ao fato de a câmera não pertencer ao autor, ele não a desmontou e removeu o contrapeso, embora isso simplificasse o design do futuro dispositivo.

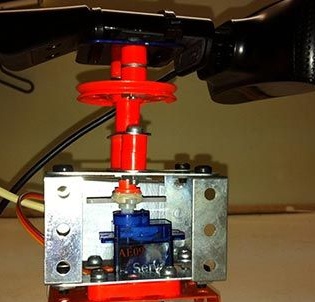
Para compensar de alguma forma o peso da câmera e distribuí-la no centro da estrutura, o autor usou duas juntas grossas. Eles permitem que você mude o peso da câmara do eixo servo para a estrutura principal e também evite a pressão do eixo na própria câmara.
A câmera é montada em uma plataforma redonda especial, que é baseada em um eixo proveniente do servoconversor. Dessa maneira, o controle da câmera é realizado por meio de uma transmissão cruzada.
Depois que a parte mecânica da estrutura ficou pronta, o autor assumiu e recheio.
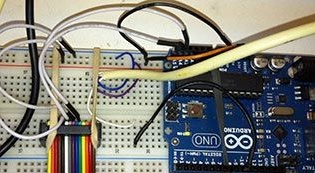
Para começar, ele decidiu conectar servos e LEDs que mostrarão o status do sistema.
O servo em si possui 3 fios: -GND, + 5V e sinal. O autor usou 9 pinos para perceber a capacidade de controlar a unidade. Para tornar um indicador de habilitação do inversor, o autor instalou um diodo conectado a dois fios: + 5V e GND com um resistor na linha + 5V.

Então, com base em artigos na Internet, o autor preparou um joystick quebrado do PS3 para controlar o drive.

Em seguida, o autor pegou um programa para o Arduino, graças ao qual é possível usar o joystick e a porta USB para controlar o servo. Para se comunicar com uma porta USB, o autor usou o controle do modem e um emulador de terminal de aplicativo, como Minicom ou Putty.
Este programa fornece várias funções para controlar a câmera.
Para instalar a câmera no centro em 90 graus, você deve pressionar "m", a câmera também chegará automaticamente a esta posição quando a energia do servo estiver ligada. Para girar a câmera para a esquerda, é necessário pressionar a tecla "F" e, pressionando o botão "J", a câmera é girada para a direita.
Você pode baixar o programa no final do artigo.
Como o autor não elaborou o design do dispositivo de rotação da câmera, ele começou a apresentar algumas desvantagens.
Por exemplo: como a câmera não está fixa no quadro, quando inclinada, ela pode cair da plataforma; como o servo é bem pequeno, o torque da câmera cria rotação adicional, que por sua vez deforma o servo; os furos para o eixo servo são muito grandes, portanto não são estáticos e também estão sujeitos a tensões.
Portanto, no futuro, o autor deseja atualizar um pouco o dispositivo da seguinte maneira: verifique se a rotação da câmera é controlada pelas setas do joystick e não pelos botões; alivie a carga no servo ao fazer curvas.