
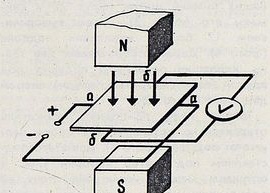
Este artigo irá falar sobre como faça você mesmo Você pode criar um dispositivo tão interessante como o Levitron. De fato, um levitron é um pião ou outro objeto que voa no espaço devido à ação de um campo magnético. Levitrons são diversos. O modelo clássico usa um sistema de ímãs permanentes e um pião. Ele passa o mouse sobre os ímãs durante a rotação devido à formação de uma almofada magnética por baixo.
O autor decidiu melhorar um pouco o sistema construindo um levitron baseado em Arduino usando eletroímãs. Usando esses métodos, a parte superior não precisa girar para subir no ar.
Esse dispositivo pode ser usado para vários outros caseiro. Por exemplo, pode ser um rolamento excelente, pois praticamente não há forças de atrito nele. Além disso, em um produto caseiro, você pode realizar várias experiências, bem, ou fazer amigos.
Materiais e ferramentas para fabricação:
- microcontrolador Arduino UNO;
- sensor Hall linear (o modelo UGN3503UA);
- transformadores antigos (para bobinas de enrolamento);
- transistor de efeito de campo, resistores, capacitores e outros elementos (classificações e marcas são mostradas no diagrama);
- fios;
- ferro de solda com solda;
- fonte de alimentação de 12V;
- cortiça;
- um pequeno ímã de neodímio;
- cola quente;
- A base para enrolar bobinas e materiais para criar um corpo caseiro.
O processo de fabricação de levitron:
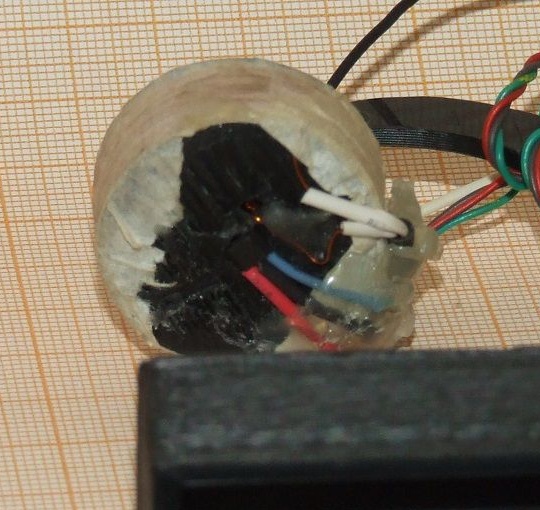
Primeiro passo Faça uma bobina
A bobina será um eletroímã, criará um campo magnético que atrairá o topo. Como topo, haverá uma cortiça na qual um ímã de neodímio está preso. Em vez de cortiça, você pode usar outros materiais, mas não muito pesados.
Quanto ao número de voltas na bobina, aqui o autor não mencionou essa figura, a bobina estava indo para os olhos. Como resultado, sua resistência foi de cerca de 12 ohms, altura de 10 mm, diâmetro de 30 mm e a espessura do fio utilizado deve ser de 0,3 mm. Não há núcleo na bobina; se você precisar fazer um topo mais pesado, a bobina poderá ser equipada com um núcleo.
Etapa dois O papel do sensor Hall
Para que o topo suba no ar, em vez de grudar firmemente no solenóide, o sistema precisa de um sensor que possa medir a distância até o topo. Como tal, um sensor Hall é usado. Esse sensor é capaz de detectar o campo magnético não apenas de um ímã permanente, mas também pode determinar a distância de qualquer objeto metálico, uma vez que esses sensores criam um campo magnético elétrico.
Graças a esse sensor, a parte superior sempre se mantém à distância certa do solenóide.

Quando a parte superior começa a se afastar da bobina, o sistema aumenta a tensão. Por outro lado, quando o topo se aproxima de um solenóide, o sistema diminui a tensão na bobina e o campo magnético enfraquece.
Existem três saídas no sensor, isto é, potência de 5V, assim como uma saída analógica. Este último está conectado ao ADC do Arduino.
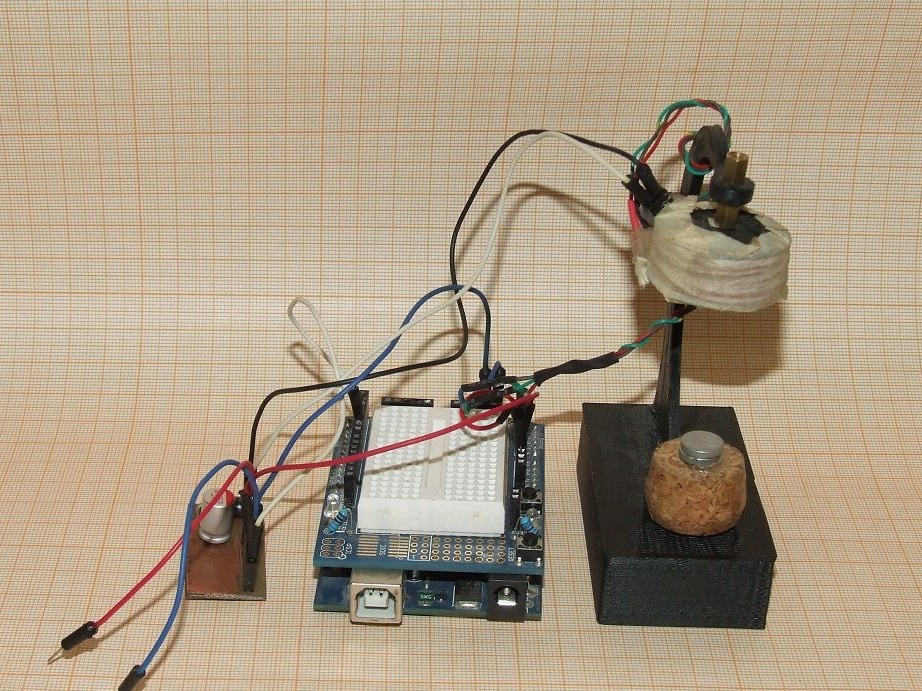
Etapa três Montamos o circuito e instalamos todos os elementos
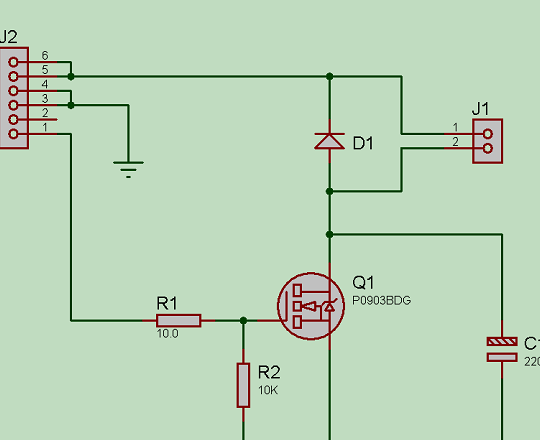
Como um corpo para trabalhos caseiros, você pode usar um pedaço de madeira, ao qual precisa fazer um suporte simples para prender a bobina. Eletrônico o esquema é bastante simples, tudo pode ser entendido a partir da imagem. A eletrônica funciona a partir de uma fonte de 12V e, como o sensor precisa de 5V, ele é conectado através de um estabilizador especial, que já está embutido no controlador Arduino. O dispositivo máximo consome cerca de um ampère. Quando o topo subir, o consumo atual está na faixa de 0,3-0,4 A.
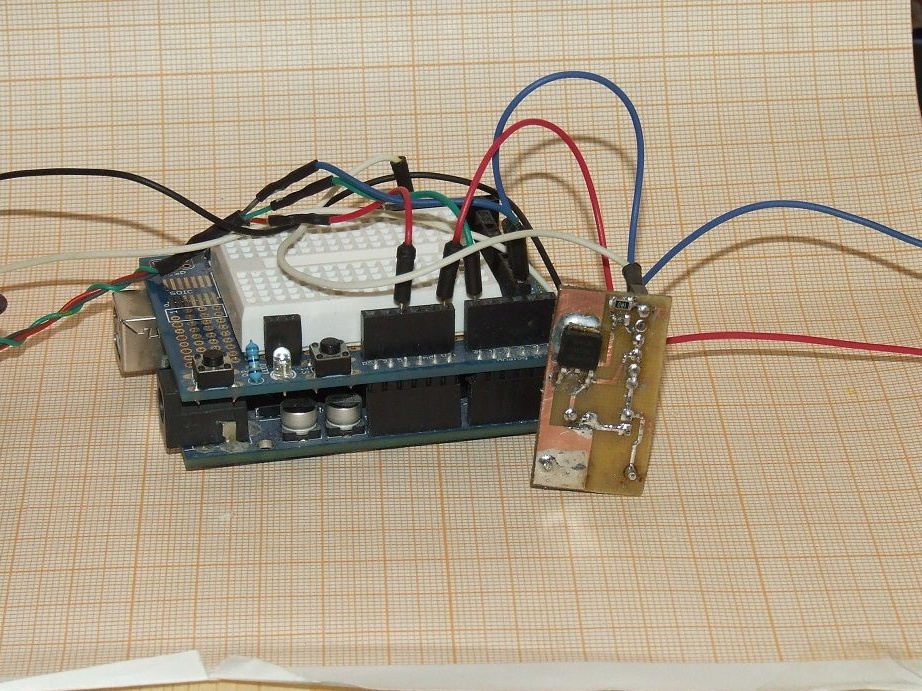
Um transistor de efeito de campo é usado para controlar o solenóide. O solenóide em si está conectado às saídas de J1 e o primeiro contato do conector J2 deve ser conectado ao PWM Arduino. O diagrama não mostra como conectar o sensor Hall ao ADC, mas não deve haver nenhum problema com isso.
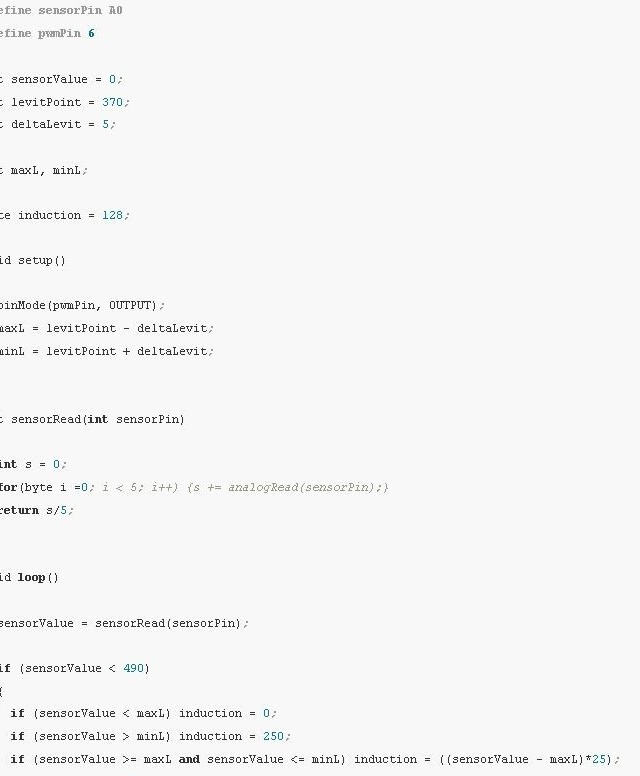
Etapa quatro Firmware do controlador
Para programar o controlador para as ações necessárias, é necessário firmware. O programa funciona de maneira muito simples. Quando os valores começam a ficar fora da faixa permitida, o sistema aumenta a corrente para o máximo ou é completamente desligado. Nas versões posteriores do firmware, tornou-se possível ajustar suavemente a tensão na bobina, para que as fortes flutuações da parte superior parassem.
Isso é tudo, o produto caseiro está pronto. Na primeira partida, o dispositivo funcionou, mas algumas falhas foram descobertas. Por exemplo, ao trabalhar por mais de um minuto, a bobina e o transistor começaram a ficar muito quentes. Nesse sentido, no futuro, você precisa instalar um radiador no transistor ou colocar um mais potente. A bobina também precisará ser refeita, tendo apresentado um design mais confiável do que apenas bobinas de arame com cola quente.
Para proteger a fonte de energia, grandes capacitores devem ser fornecidos aos circuitos de entrada. A primeira fonte de alimentação de 1,5 A do autor foi queimada após 10 segundos devido a fortes picos de energia.
No futuro, está planejado transferir todo o sistema para uma fonte de alimentação de 5V.