

Este projeto é ideal para quem muitas vezes esquece de alimentar seus peixes. Ou simplesmente nem sempre é capaz de fazê-lo a tempo. Depois de criar esse alimentador, você não pode se preocupar com seus bichinhos de estimação e até ficar à vontade para sair por um tempo.
Materiais:
- Arduino UNO ou outro microcomputador compatível.
- Adaptador de energia 9V ou 12V.
- Um motor de passo de 5V de uma unidade de disquete antiga.
- Partição suave (usada na caixa de ferramentas).
- Alavanca mudar de um telefone fixo.
- A caixa do disco rígido (serve como um recipiente para alimentação).
- Placa lisa (por exemplo, régua de plástico).
- Tripé de uma câmera de CFTV.
- Resistor 10 kOhm.
- Temporizador CA mecânico.
Primeiro passo Montagem do caso:
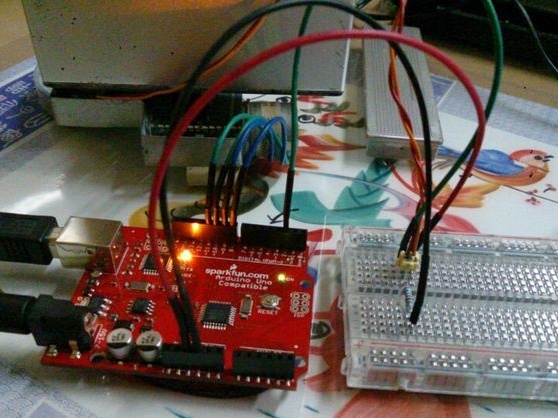
O design da montagem é mostrado na primeira figura. Um orifício é cortado em um lado do gabinete do disco rígido. Para esta parte do alimentador, você pode até usar uma garrafa de plástico; no entanto, você precisará de um suporte para que seja mantido de cabeça para baixo.
O autor usa um tripé de uma câmera de CFTV, pois possui uma altura ideal para a instalação de um motor de passo embaixo dela. Tudo o que restava era fazer um buraco na carcaça.
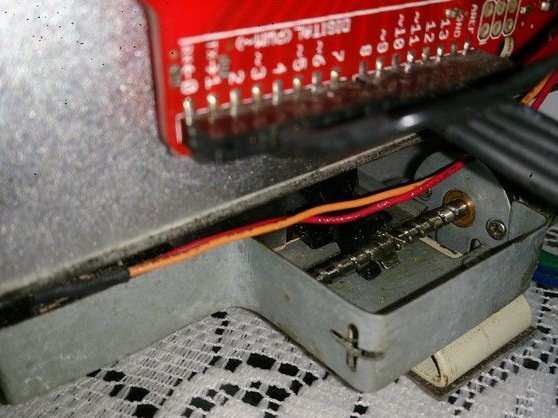
Um motor de passo de 5V com um mecanismo de acionamento usado para mover as lentes de acionamento foi usado para mover a tampa. Uma partição suave da caixa foi colocada em cima do suporte da lente, abaixo do orifício onde os pellets de alimentação devem sair. Para fazer isso, também é recomendável usar uma régua quebrada. Deixe um milímetro a partir do fundo do casco para que os pellets de ração passem pela tampa fechada.


Etapa dois Modificação do corpo:
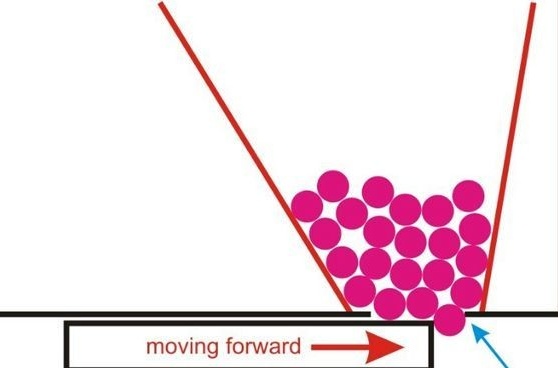
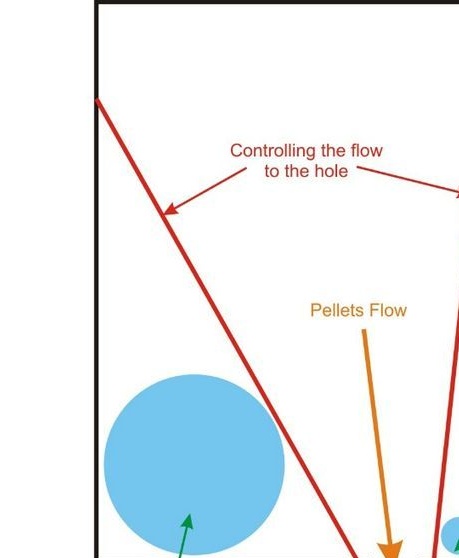
O diagrama a seguir mostra como a alimentação deve passar pelo orifício corretamente para que os pellets não permaneçam nos ângulos de saída da alimentação.
Após dois dias de uso, o autor percebeu que parte da alimentação estava presa, mas não saiu como pretendido. É por isso que precisávamos de uma régua ou qualquer placa lisa que caiba no recipiente e na forma da letra V.

Etapa três Eletrônico parte do alimentador:
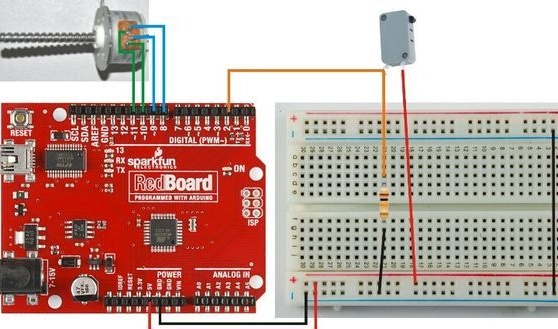
Um motor de passo, um resistor de 10 kΩ e um interruptor são instalados como mostrado no diagrama abaixo. Para facilitar o entendimento da operação do circuito e dos testes, é utilizada uma placa de ensaio, que está faltando na montagem final (exemplo na última foto).
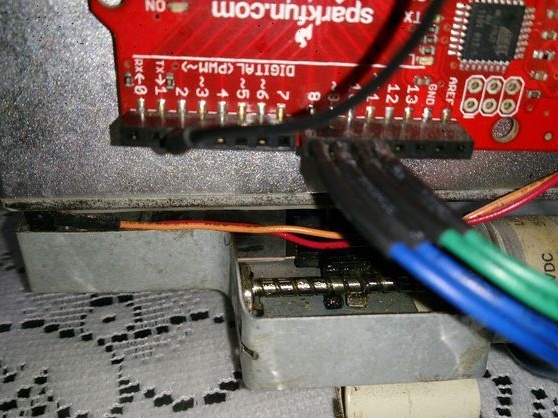
Quatro fios do motor se conectam aos pinos digitais 8-11. Um pé do interruptor para a saída de potência de 5V. A segunda perna, por sua vez, é conectada ao terra usando um resistor de 10 kΩ e também ao pino digital 2.
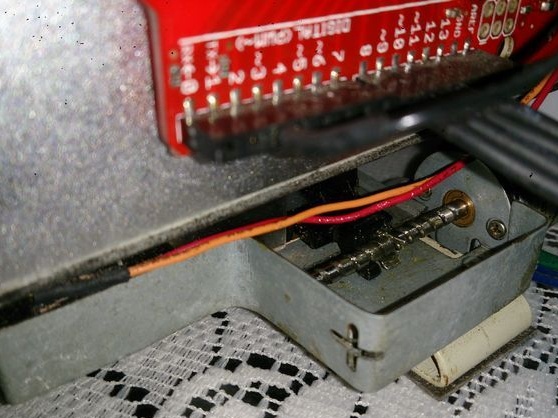
O interruptor é colocado na frente da tampa móvel e a parte metálica é dobrada, formando uma tampa (fio vermelho e laranja na terceira foto). Quando o interruptor é movido para frente e pressiona a parada, o Arduino registrará um valor ALTO e desligará o motor.
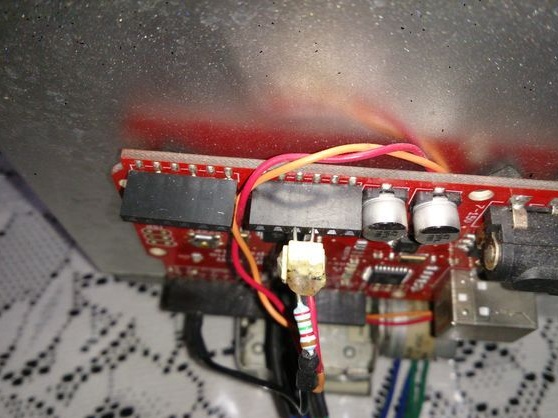
A placa é presa na parte traseira do gabinete com fita isolante e o plugue com um temporizador na lateral. Eles são usados para equilibrar o estojo para que ele permaneça na posição correta.
Teste de trabalho caseiro sem recipiente para alimentos:
O vídeo a seguir mostra a operação de um dispositivo totalmente montado. Como você pode ver, a primeira saída de alimentação está correta. Na segunda saída da alimentação, pode-se observar que, se os grânulos estiverem presos e a tampa não fechar adequadamente, ela se moverá para frente e para trás até fechar corretamente.
Código do programa: