
Este artigo é baseado nas idéias do século passado, o autor tentou repeti-lo usando ímãs de neodímio. O ponto é que você não precisa de um poderoso gerador de eletricidade e, consequentemente, da mesma unidade para isso. Você pode usar um inversor e vários geradores menos potentes operando na mesma carga, conectados entre si nesse caso específico, através de uma engrenagem magnética.
Vi uma caixa de engrenagens magnética baseada nesse princípio. Havia algumas patentes na Internet.
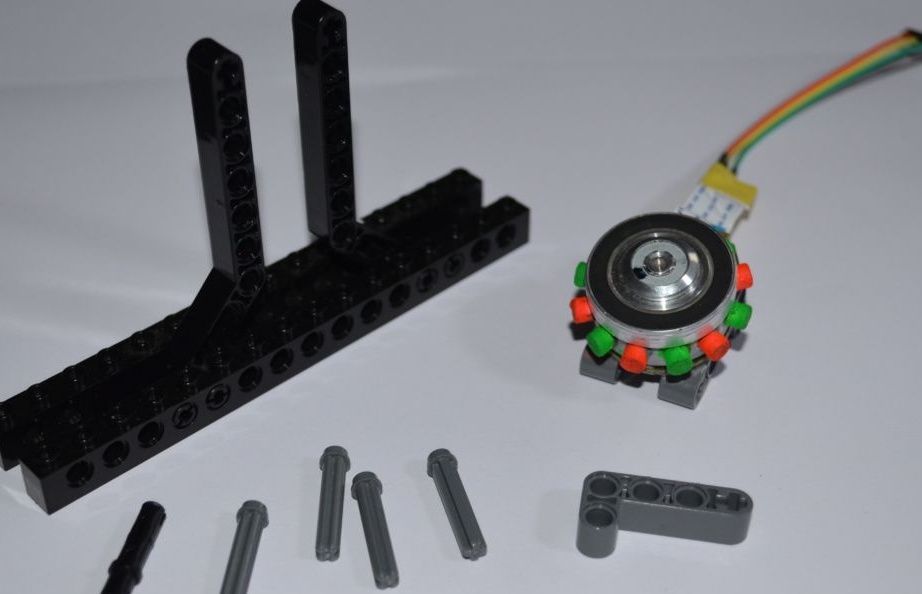
O que você precisa para um protótipo:
- motores de unidades de CD / DVD 5 peças.
- Ímanes de neodímio com 5 mm de diâmetro e 4 mm de altura 60 peças
-Bordo
- pontes de díodos 200v 2A 15 unid.
- LEDs vermelho, amarelo, verde 5mm para 15 peças. todo
- resistores 150 Ohms 0,125 W 15 peças.
fio
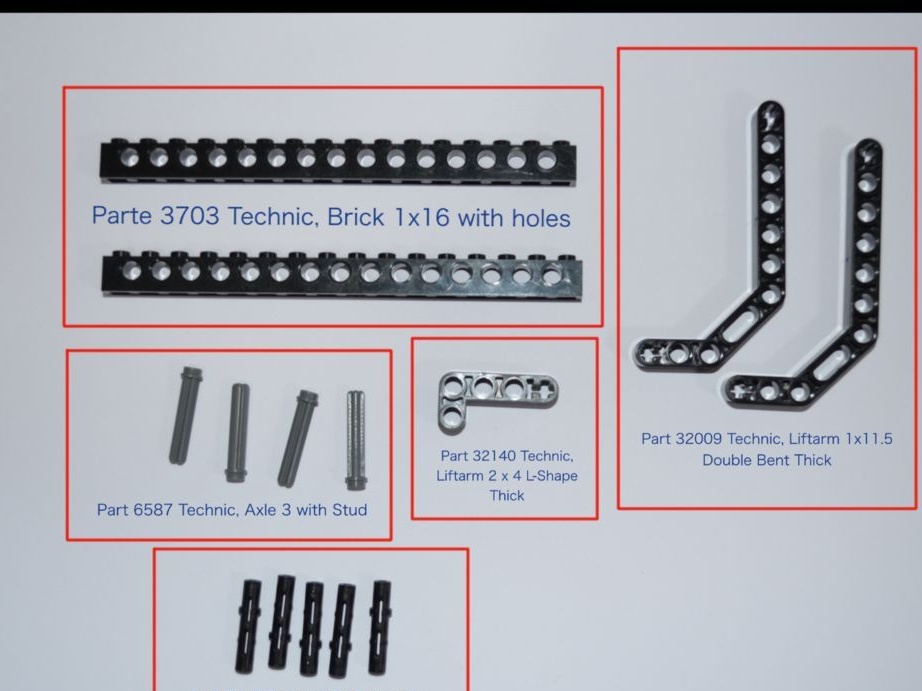
Lego:
• Tijolo 1x16 (LEGO No. 3703) - (10 peças)
• Liftarm 1x11.5 (LEGo No. 32009) - (10 peças)
• Liftarm 2x4 L (LEGO No. 32140) - (15 peças)
• Eixo 3 com perno (LEGO No. 6587) - (20 peças)
• Pin longo com fricção (LEGO No. 6558) - (25 peças)
Cola, termorretrátil com diâmetro de 1,5 mm, tinta fluorescente laranja e verde








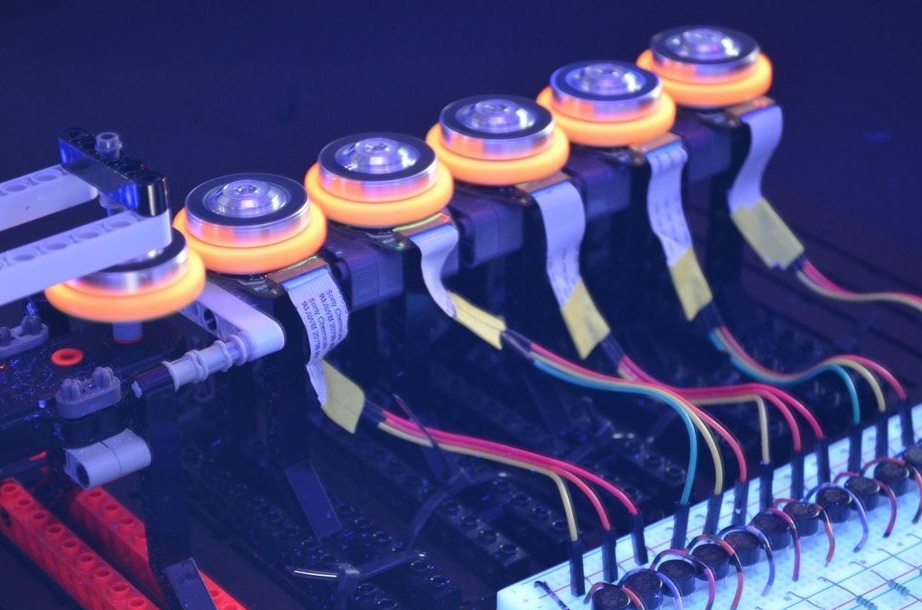
MOTORES DE MONTAGEM
Os motores usados neste projeto são sem escova (válvula), para mais detalhes sobre eles podem ser lidos
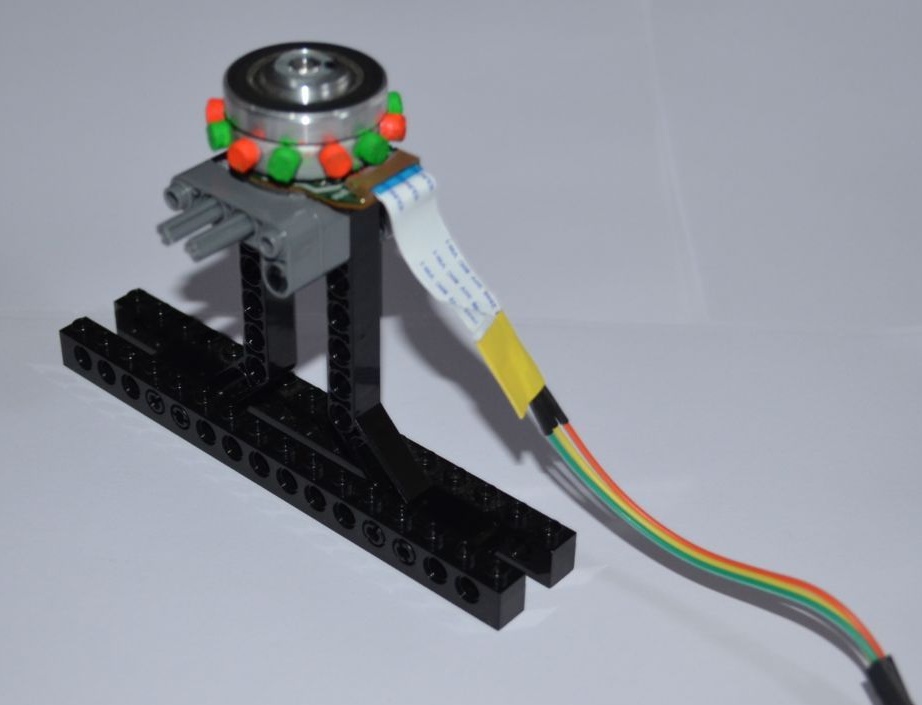
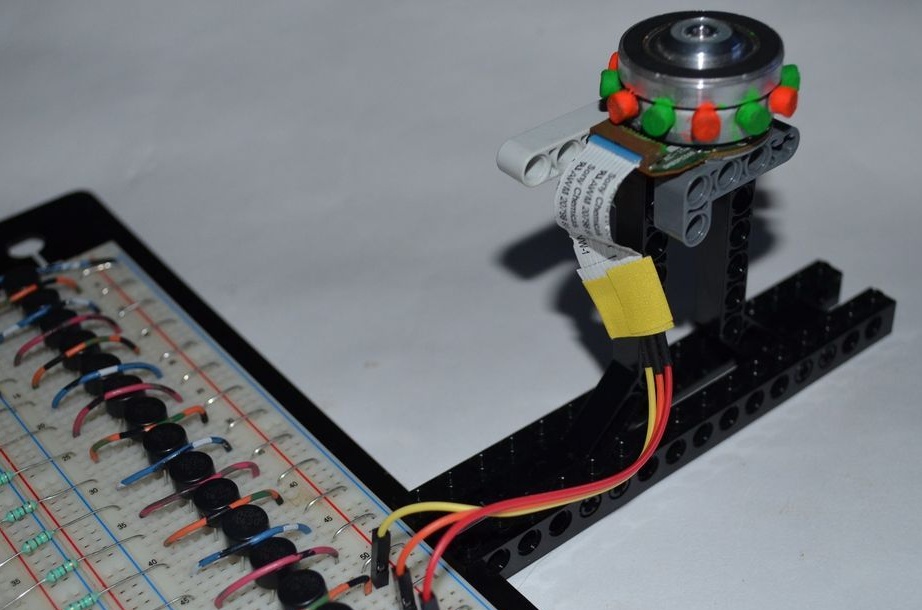
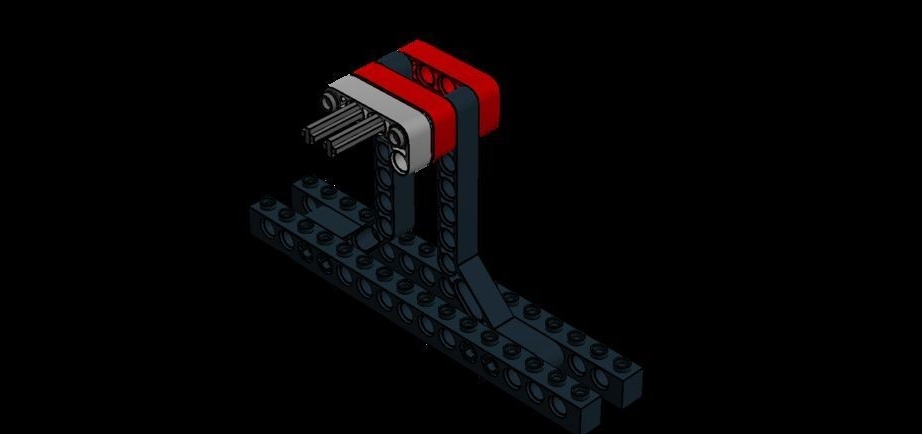
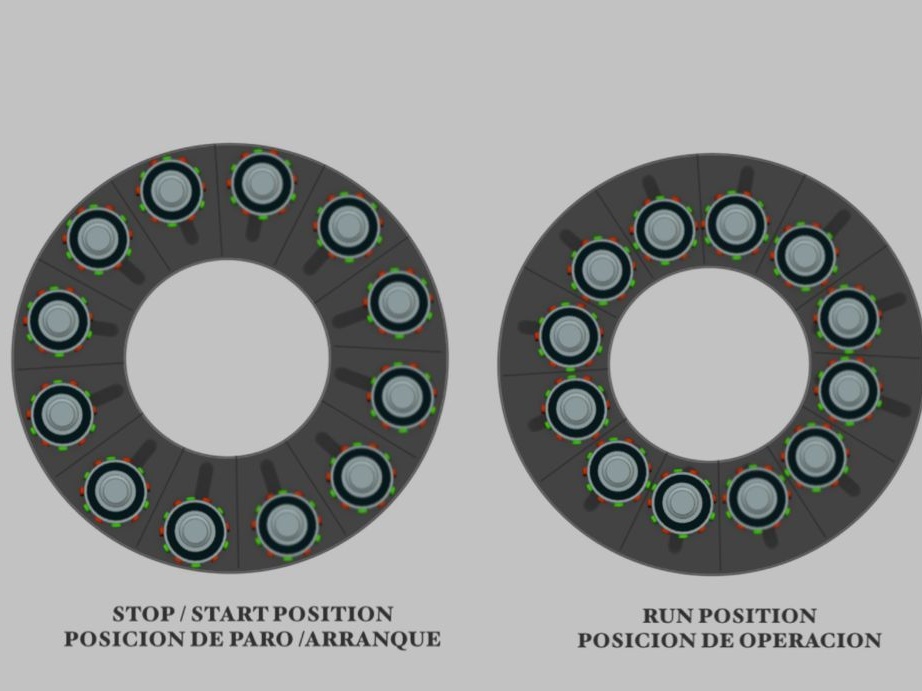
A instalação dos motores é realizada em peças da LEGO, como mostra a foto,



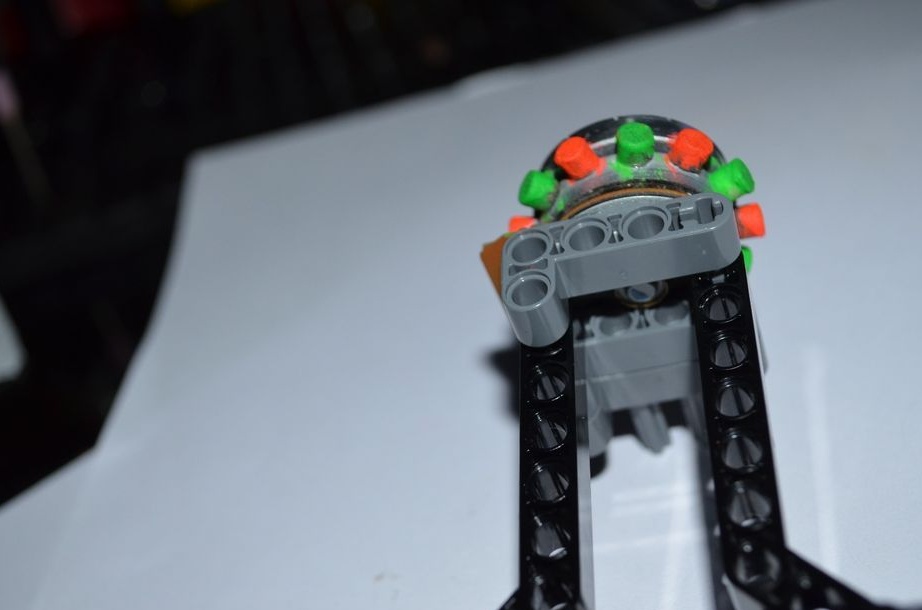
Usando cola cianoacrílica. Não queira que o LEGO venha com seu próprio suporte. Em seguida, coloque ímãs no motor para que seus pólos se alternem S-N-S-N-S. O autor não escreve sobre isso, mas provavelmente é melhor descrever previamente o arranjo dos ímãs em algum programa.
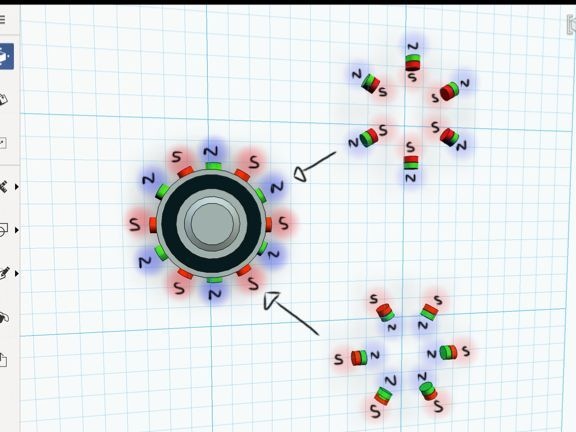
Mas lembre-se de que os ímãs são poderosos e muito frágeis; se eles são atraídos a uma longa distância, eles simplesmente quebram. Isso aconteceu comigo. A cerca de 20 cm, os ímãs caíram e um deles simplesmente desmoronou. Devido às altas velocidades de rotação, os ímãs devem ser colados aos motores, caso contrário, eles simplesmente voarão pela sala. Após o adesivo, pinte cada ímã em cores diferentes para que o trabalho possa ser melhor visualizado.
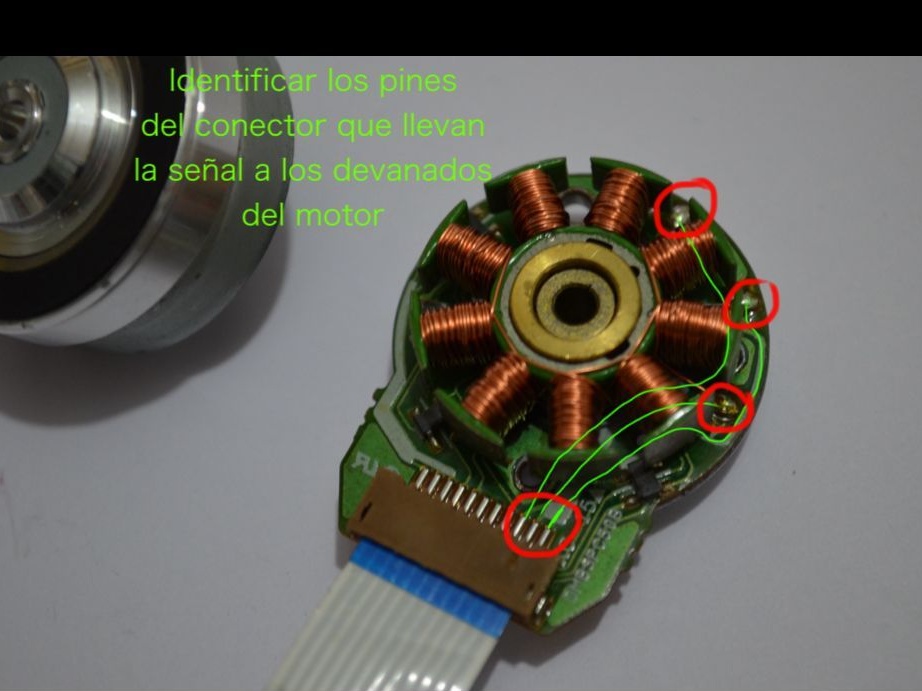
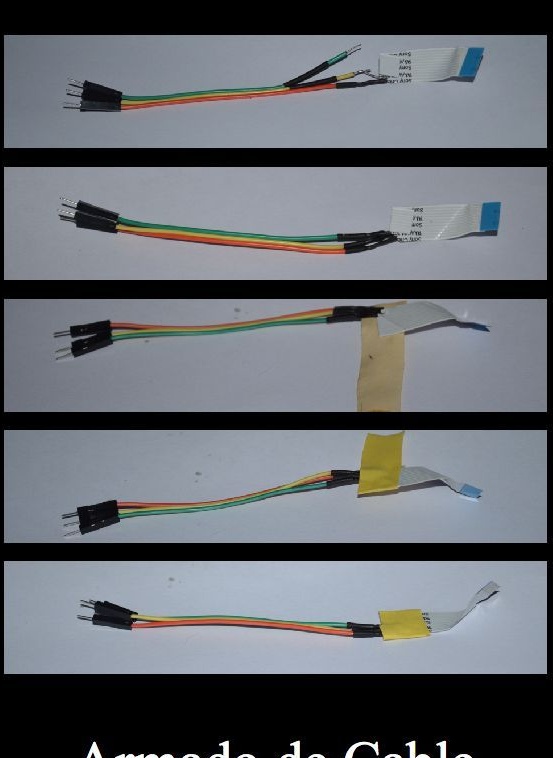
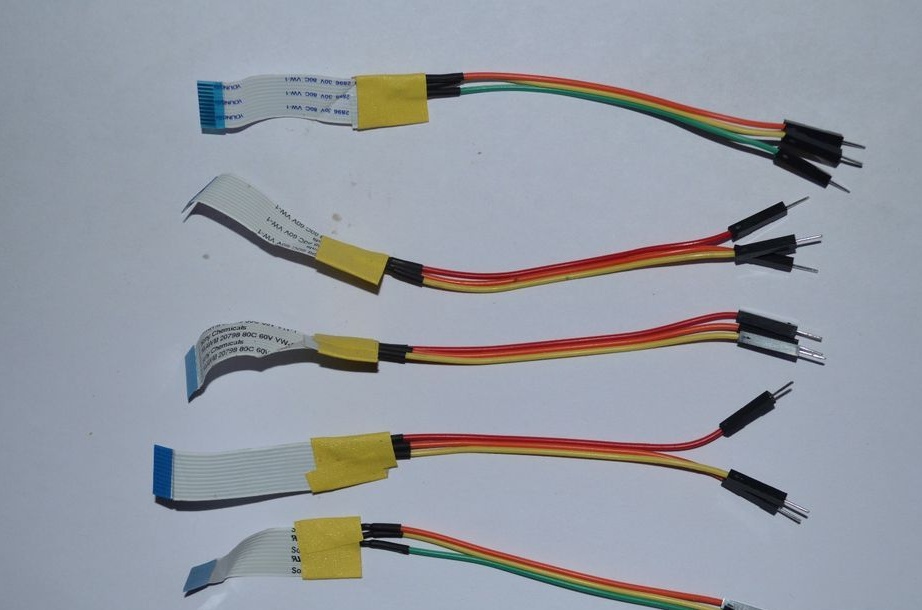
Conexão de motores.
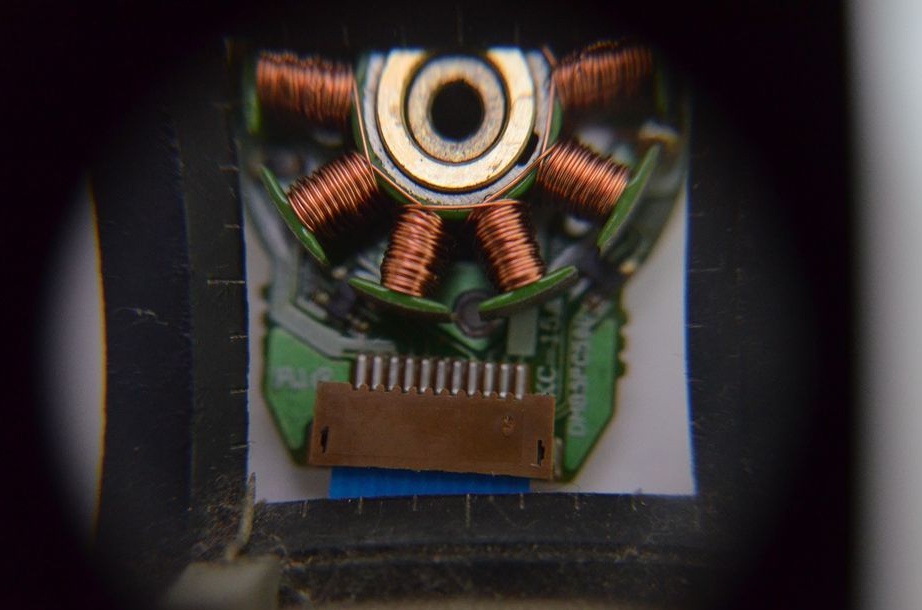
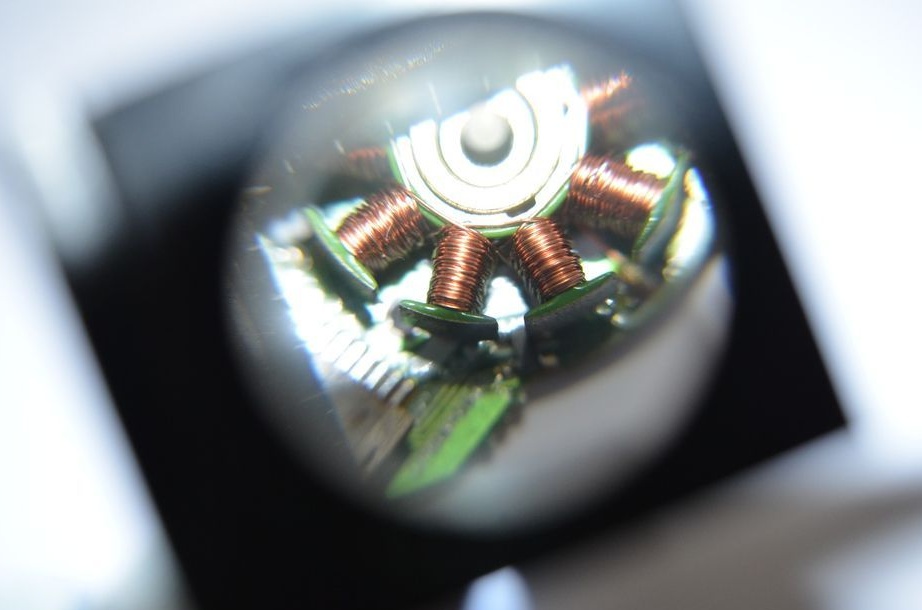
Cada um dos motores possui várias bobinas conectadas juntas em 3 fases. É necessário determinar a quais conclusões do loop essas três fases estão conectadas. Isso pode ser feito seguindo as faixas na placa de circuito com uma lupa.
Solde suavemente os fios a esses terminais.



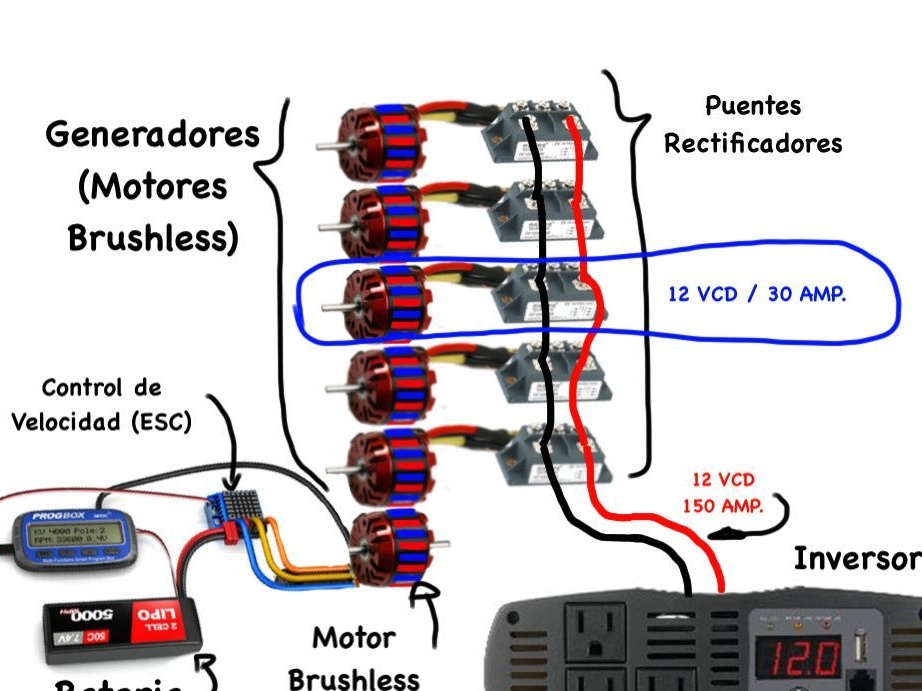
Montamos um circuito elétrico.
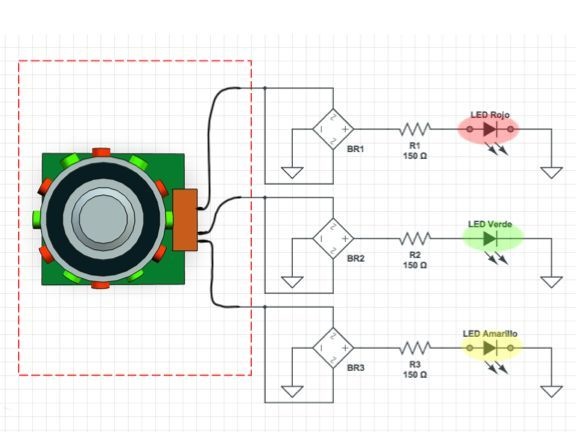
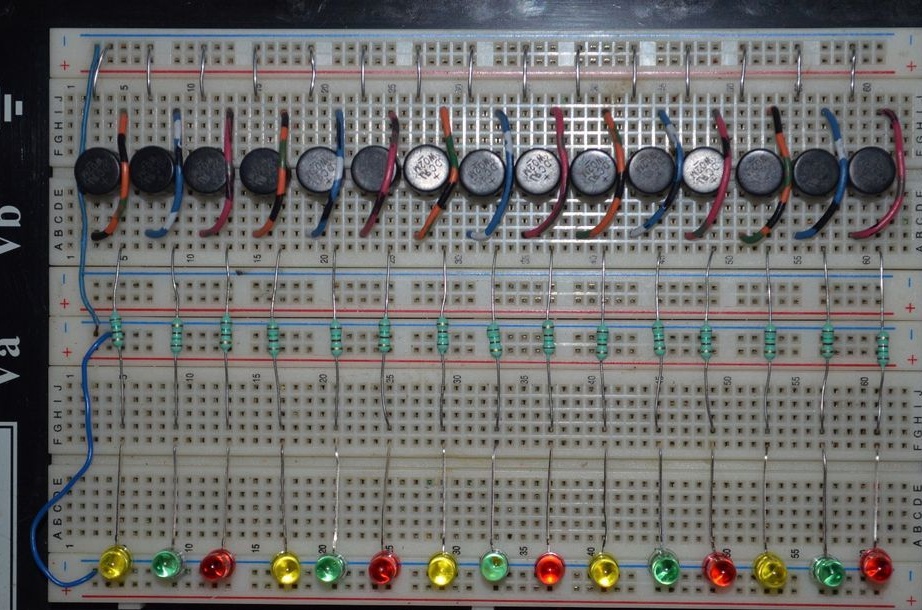

Nos motores de válvulas, que são usados como geradores, nesse projeto, a saída será uma tensão trifásica alternada. Para obter uma tensão constante, pontes de diodo completas são usadas.Meias pontes também podem ser usadas, mas isso reduzirá a corrente de carga máxima possível. No diagrama, cada fase está conectada ao LED, isso é feito para maior clareza. Na prática, todas as fases após os retificadores serão conectadas.
Montamos toda a estrutura




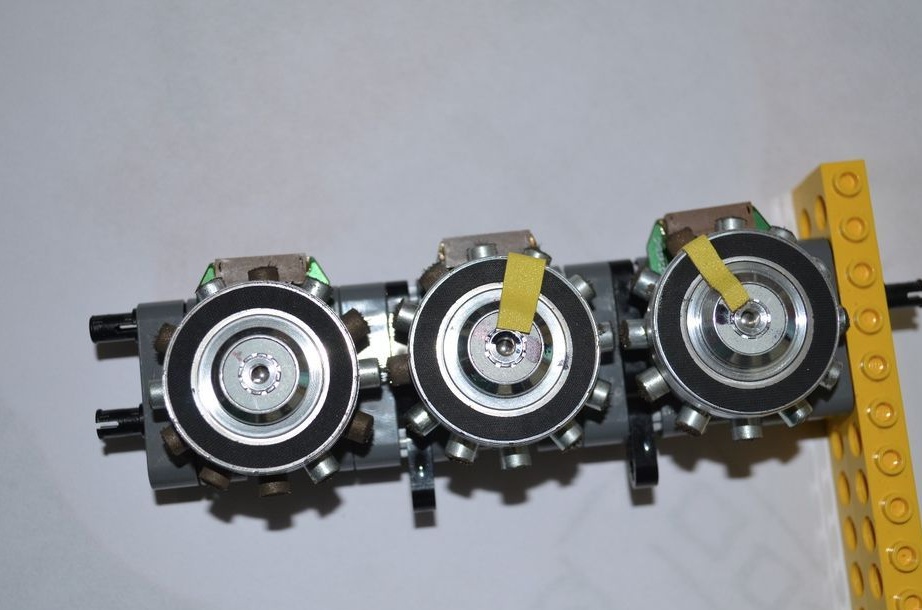
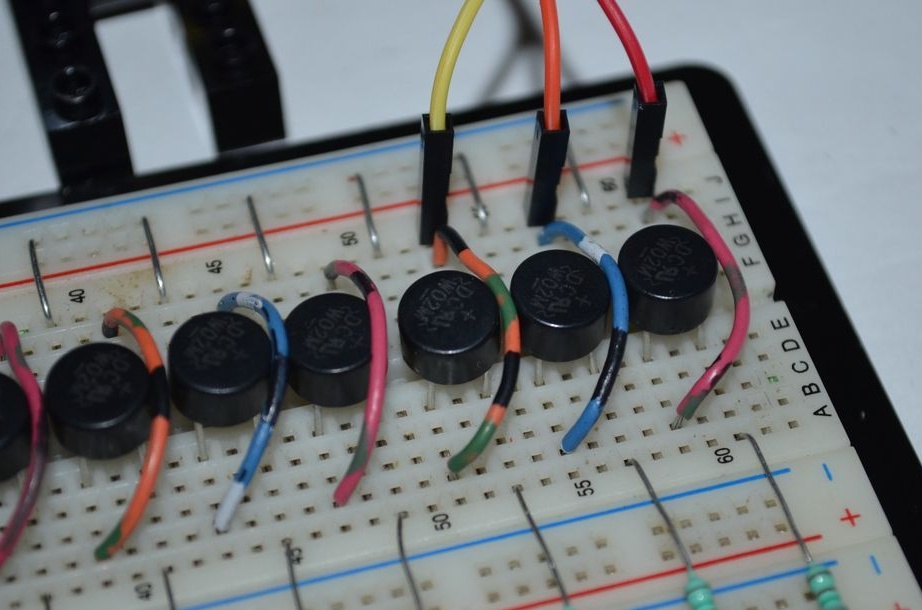
Coloque os motores um ao lado do outro, como mostra a foto. Quanto mais perto você coloca os motores, maiores as velocidades que você pode alcançar sem perder a sincronização entre os motores.


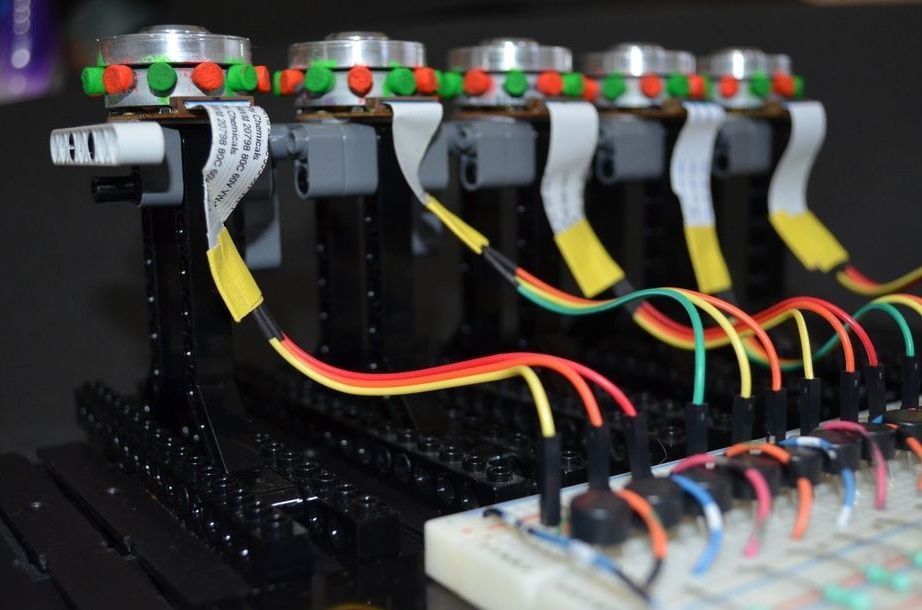
Conecte todos os cabos do motor às pontes de diodos. IMPORTANTE: É necessário fixar firmemente os motores na base, eles girarão em alta velocidade e uma forte vibração aparecerá devido aos ímãs desequilibrados dos ímãs.
Após a montagem, vários testes foram realizados, eis o que aconteceu durante os experimentos:
Quanto mais rápido o motor gira, maior a tensão de saída (Lei de Faraday)
Quanto mais rápido o mecanismo gira, maior a probabilidade de separação dos ímãs: wink :: wink:
Se você aumentar a distância entre os motores, eles serão mais fáceis de acionar, mas em altas velocidades, a sincronização será perdida. Se a diferença for reduzida, para acioná-los, você precisará de mais esforço, mas a sincronização não será interrompida.
Recomendações para o próximo passo:
Use motores sem escova OUTRUNNER inferiores a 1000KV (KV = RPM / Volt).


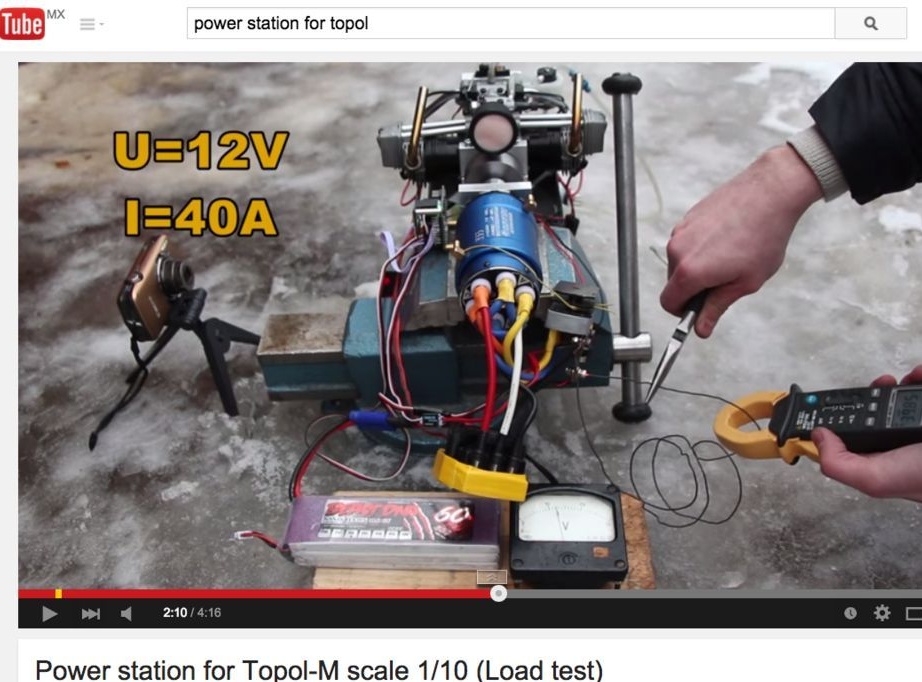
A foto acima mostra um exemplo de controle do controle de velocidade e potência de saída. Preste atenção ao aquecimento dos motores por minuto para garantir uma operação ideal e, se necessário, fornecer refrigeração. (Motores EXTRUNNER de barcos vêm com refrigeração a água)
O autor usa mecanismos de unidades de CD / DVD 12v 1A, que fornecem 12W de potência. Se você usar motores de modelos de aeronaves, poderá obter resultados impressionantes, pois existem pequenos motores de várias centenas de watts. Se você os amarrar, poderá obter uma potência de 1500 watts.

Na foto abaixo, o protótipo da unidade Topol M
Você também pode alterar a configuração dos geradores para adaptá-la à carga.