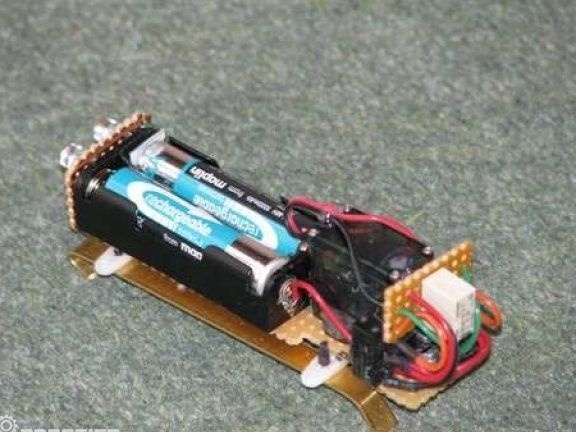
Carpet Crawler é um pequeno robô pertencente à classe BEAM. Tais robôs incluir imediatamente dois elementos como estética, biologia, eletrônica e mecânica. Graças a essa abordagem, esses robôs imitam os seres vivos o máximo possível, às vezes parece que eles são capazes de pensar.
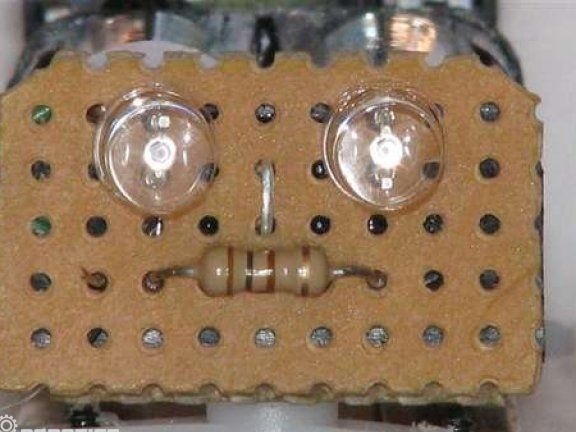
Como um cérebro para esses robôs, relés e sensores são usados, e movimentos caseiro devido ao servomotor. As pilhas AAA são usadas como energia. Como os olhos que ardem intensamente, dois LEDs estão instalados.
Materiais e ferramentas para fabricação:
- tira de latão medindo 1/32 "x 1/4" x 8 ",
- dois pedaços de tiras de cobre;
- porcas e bots M2;
- servomotor (Micro RC (7,5 g));
- dois microinterruptores (podem ser obtidos em drives antigos);
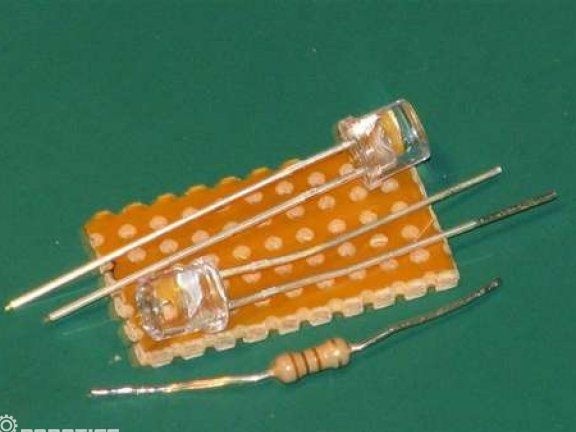
- dois LEDs (é melhor usar vermelho, porque branco ou azul neste caso pode funcionar);
- um resistor 100R (se os LEDs estiverem amarelos ou verdes, então 47R);
- duas pilhas AAA e um suporte para elas;
- fiação fina.




Processo de fabricação:
Primeiro passo Alteração do servomotor
O servomotor é projetado de maneira que, durante a operação, faça movimentos impulsivos. Nesse caso, ele precisa ser refeito para que funcione na rotação. Existem duas maneiras de fazer isso.
No primeiro caso, você pode economizar velocidade e direção do controle do motor, bem como dos eletrônicos de controle. O dispositivo ainda precisará de pulsos de entrada para operar.
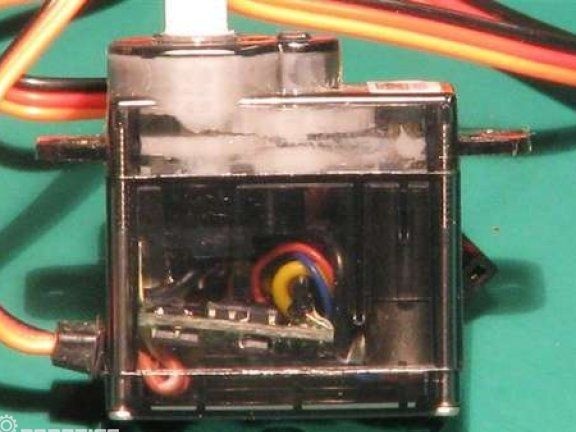
O autor seguiu o outro caminho. Precisa cortar o elemento de parada das engrenagens. Então as engrenagens precisam ser alinhadas; será difícil montá-las novamente se a sequência for perdida. Ao desmontar, a superfície do servomotor deve ser lubrificada com graxa de silicone.
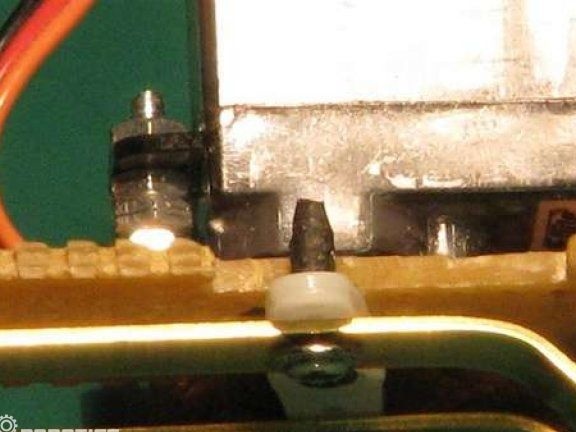
A imagem mostra o mecanismo de controle do RSV que precisa ser movido.

Após remover a placa, o fio vermelho deve ser comutado exatamente para o fio vermelho do motor. Os fios devem ser cuidadosamente enrolados com fita isolante para evitar curto-circuito.

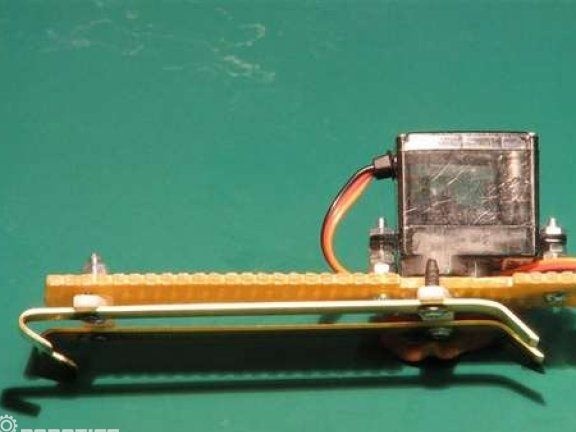
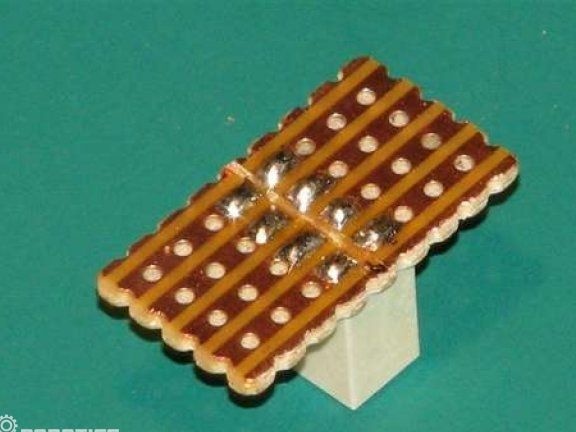
Etapa dois Crie a parte mecânica
Na placa de trabalho, você precisa fazer vários furos e depois instalar o relé na parte traseira da bateria.Para a montagem do servoconversor, são utilizados parafusos de 2 mm.
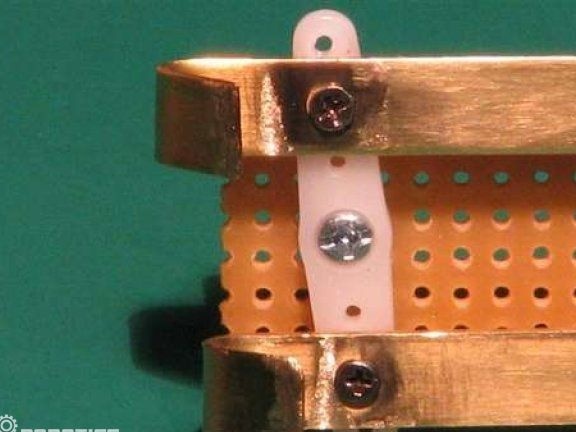
As pernas do robô são feitas de placas de cobre sólidas, para isso são primeiro cortadas em pedaços de um determinado comprimento e fazem curvas. Graças a essas deflexões, o robô se agarra à estrada e rasteja. Aperte a placa com parafusos pequenos.


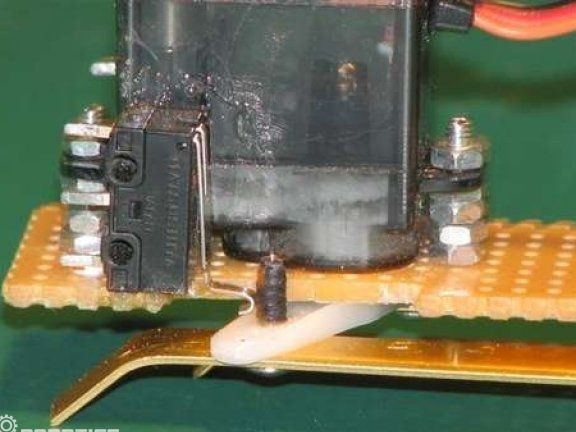
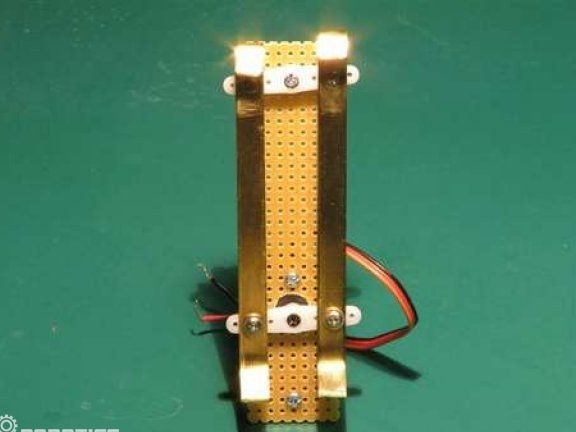
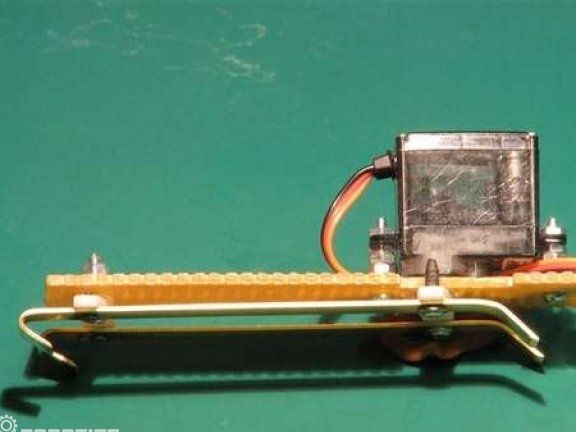
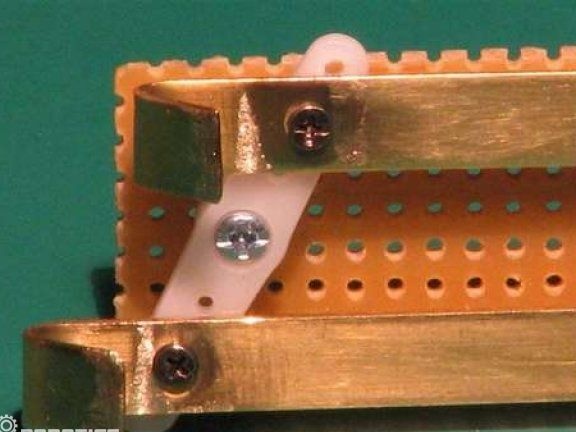
Para controlar as pernas, você precisa definir os interruptores. Eles estão ligados ao servomotor com cola.
Etapa três Circuito eletrônico do robô
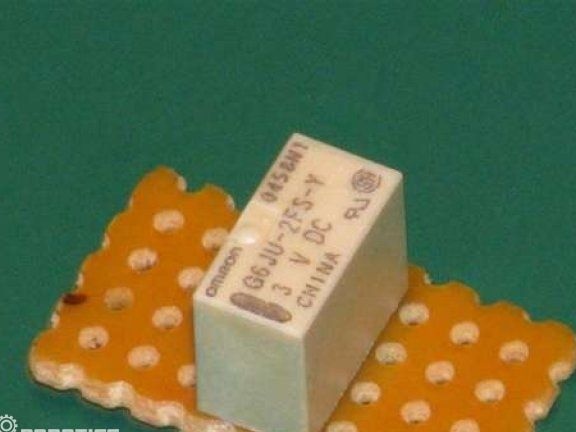
O principal componente do trabalho de fabricação caseira pode ser considerado uma trava de relé, que funcionará quando desconectada da bobina. O relé mudará de movimento, mas permanecerá em um lugar até o próximo turno.
Os pulsos para as bobinas virão de dois microinterruptores, eles serão ligados quando o relé da antena tocar no interruptor.

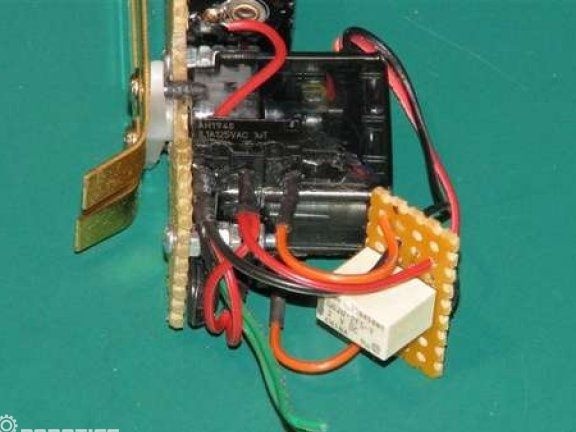
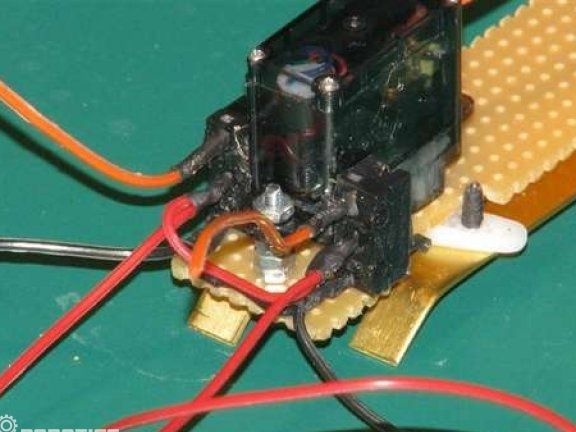
Etapa quatro Montagem da parte eletrônica
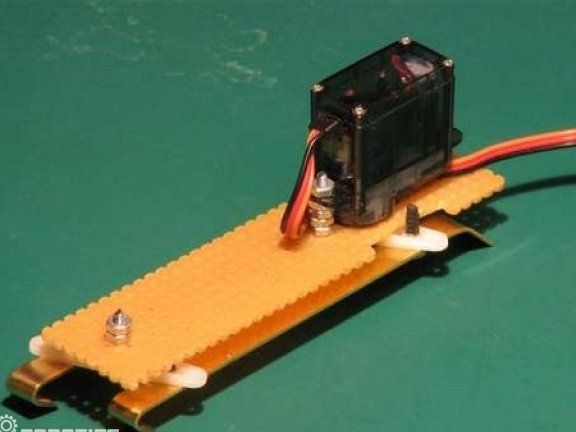
O relé é montado em um pedaço de uma placa, para facilitar a conexão. Todo o processo de conexão da eletrônica é mostrado na foto.





Isso é tudo, agora o robô está pronto. O melhor de tudo é que ele parecerá estar na superfície do tapete, pois foi projetado especificamente para esses lugares. Primeiro, o robô deve acender os LEDs e depois rastejar lentamente pelo chão.