

Quer ter uma briga entre robôs-aranha? Estude cuidadosamente este artigo, nele o Mestre lhe dirá como fazer uma aranha. E para maior clareza de seu trabalho, vamos ver o vídeo.
Ferramentas e materiais:
Para a aranha
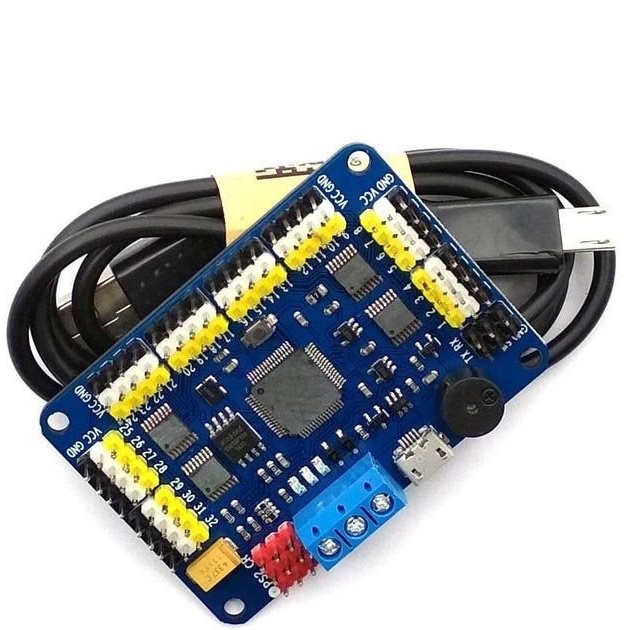
Servo controlador de 32 canais;
- Controlador Wemos D1 Mini;
- Servomotores MG90S - 18 peças;
-Ubec 6A 5V controlador;
- conversor buck DC-DC;
- Jumpers;
-Bateria;
Para a torre
-Dois motores;
Módulo de potência;
- Conversor abaixador;
Servo;
Impressora 3D;
-Pistola de cola;
Cola;
- chave de fenda;
-Fixadores;
- fita dupla face;
-Nippers;
-Faca;
-Nadfiles;
-Bolas de plástico;
Acessórios de solda;






Etapa 1: Imprimir peças
Primeiro, você precisa imprimir os detalhes do corpo e das pernas em uma impressora 3D. Você pode fazer o download de arquivos para impressão neste o link.


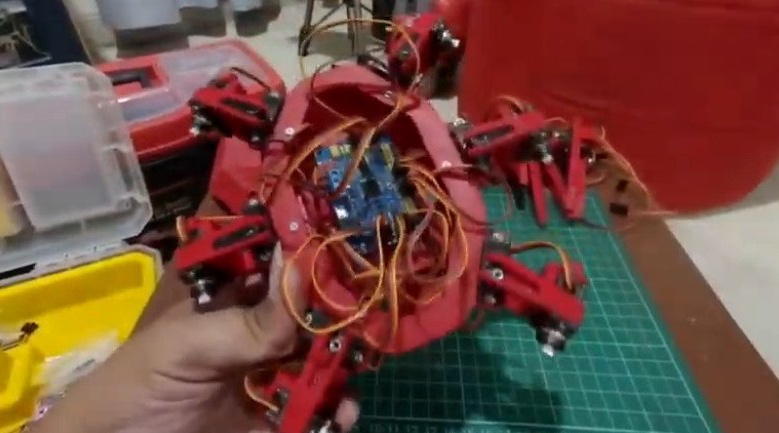
Etapa 2: criar
Agora você precisa coletar robopauk.
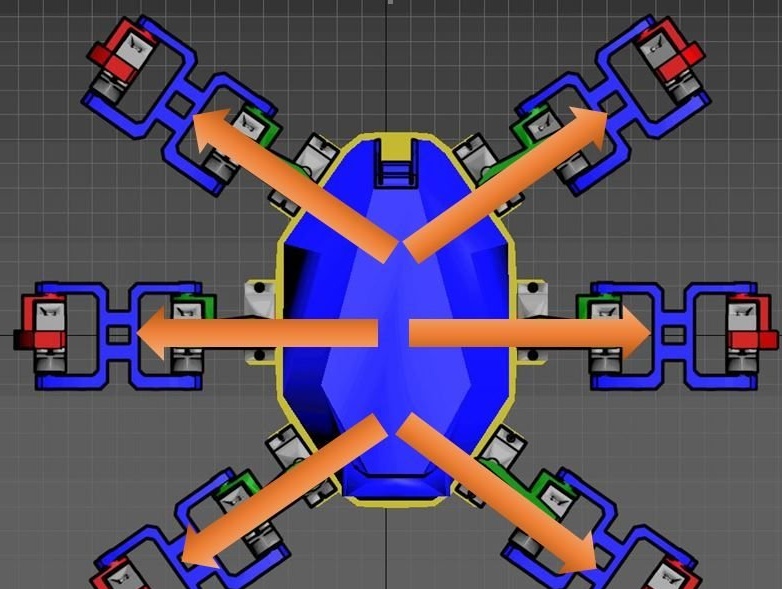
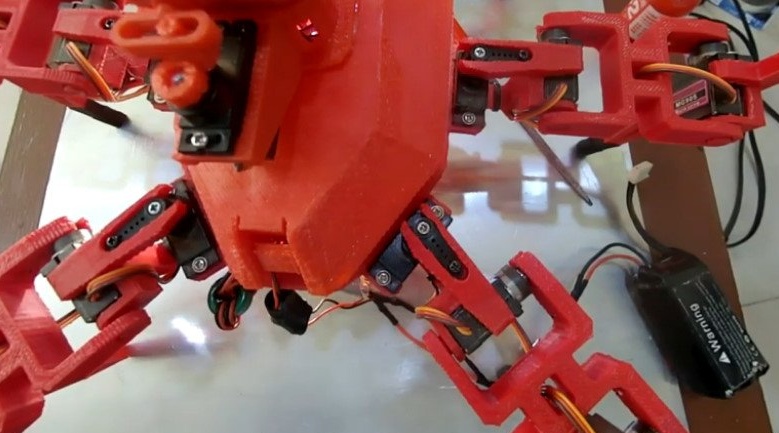
O mestre instala servos nas articulações das pernas da aranha. No total, o robô tem seis pernas e três servos em cada perna.








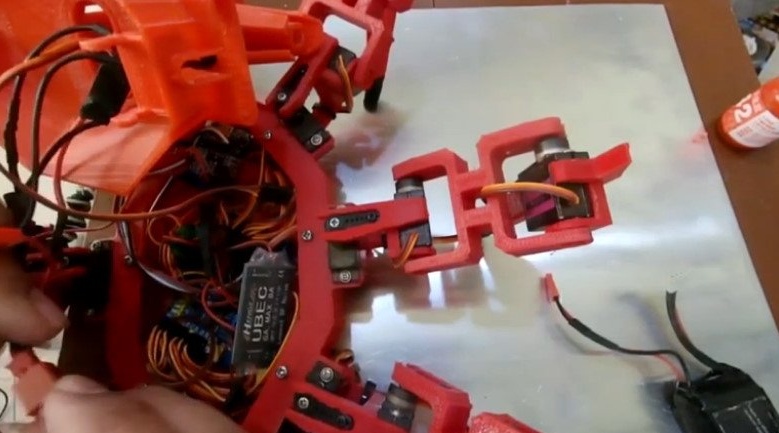
Instala servos na plataforma do chassi.




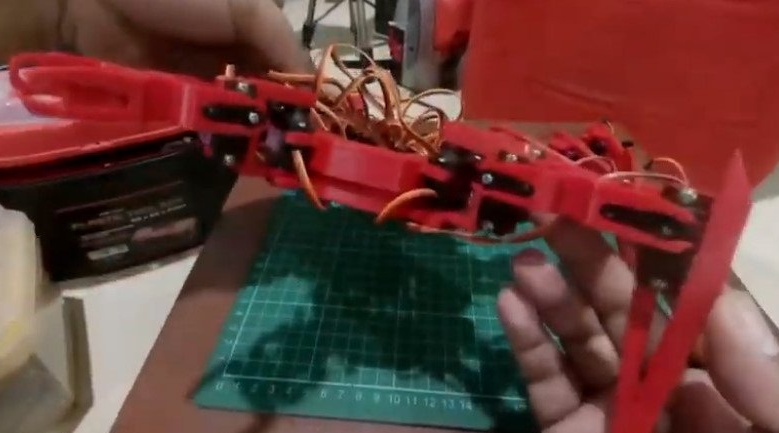
Prende as primeiras articulações das pernas aos servos da plataforma.




Os fios são puxados para os orifícios tecnológicos e conectados ao controlador.





Instala stubs.


Estabelece as segundas articulações das pernas. Conecta os fios dos servos ao controlador.






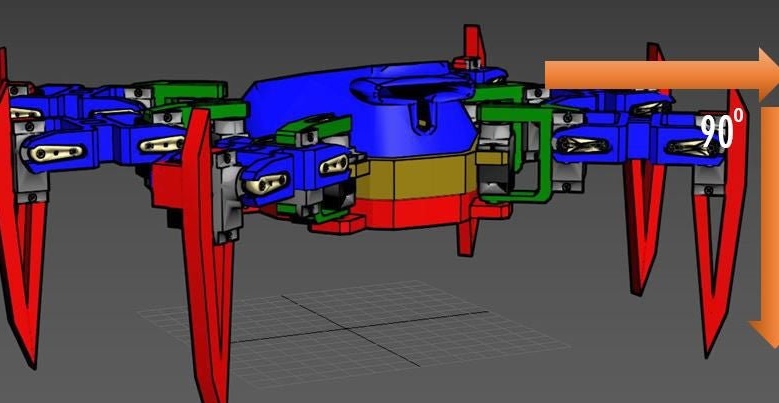
Instala a terceira junta. Com esta articulação, a aranha encosta contra a superfície ao se mover.



Conecta e verifica o funcionamento de cada servoconversor.



Se tudo normalmente fixa os fios com amarras, instala a bateria e fecha a tampa.



O processo de compilação pode ser visto no vídeo.
Etapa três: sobre eletrônica
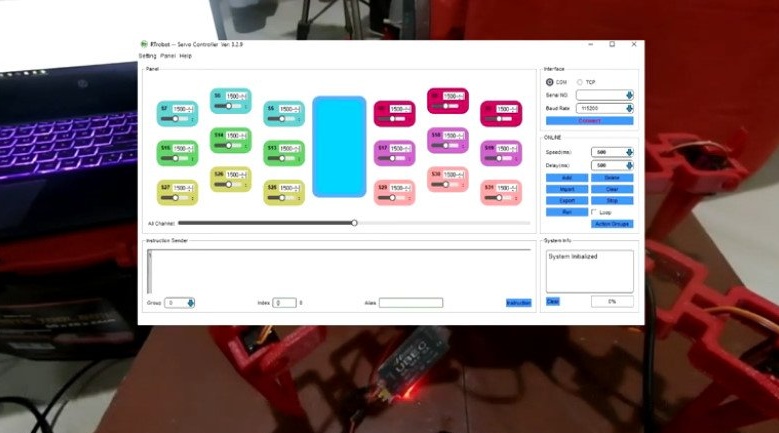
O assistente usou o servocontrolador RTrobot para controlar os movimentos. Programa de gerenciamento pode ser baixado aqui ou aqui.
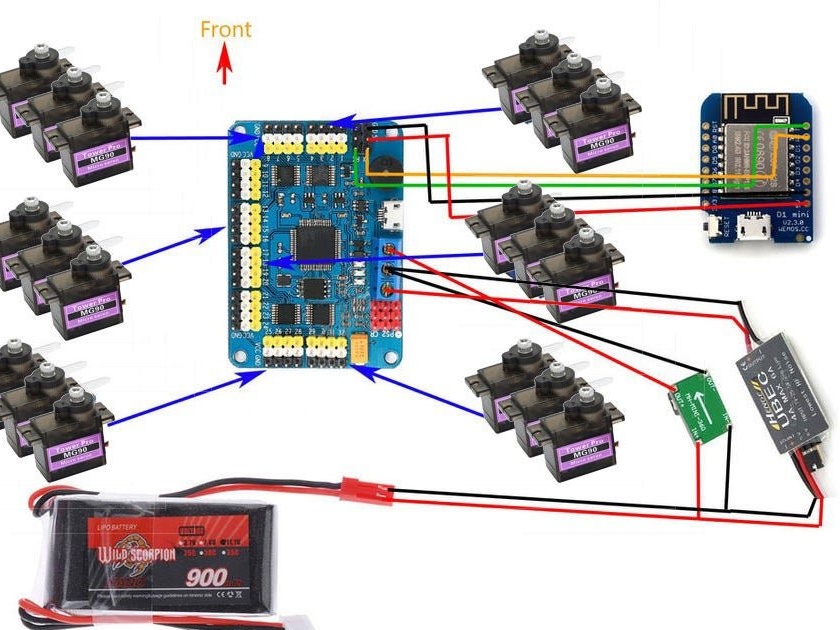
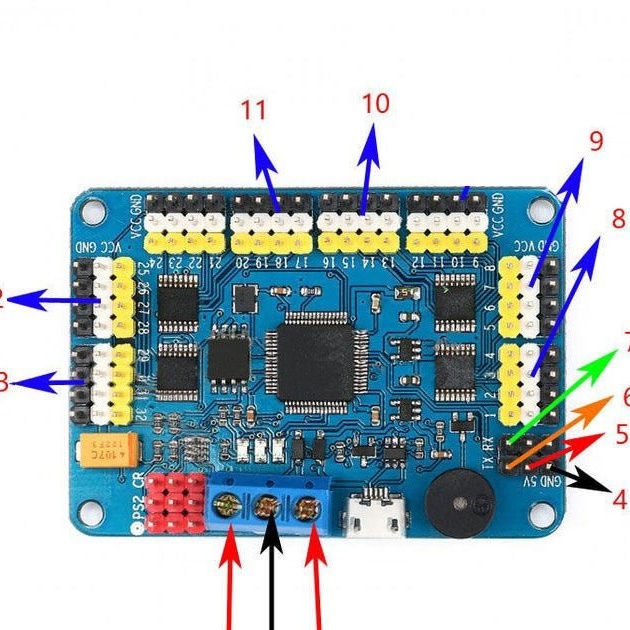
Tudo está conectado da seguinte maneira:
1. saída UBEC de 5V (+)
2. Terra do conversor UBEC e buck
3. Fonte de alimentação de 5 V (+) do conversor
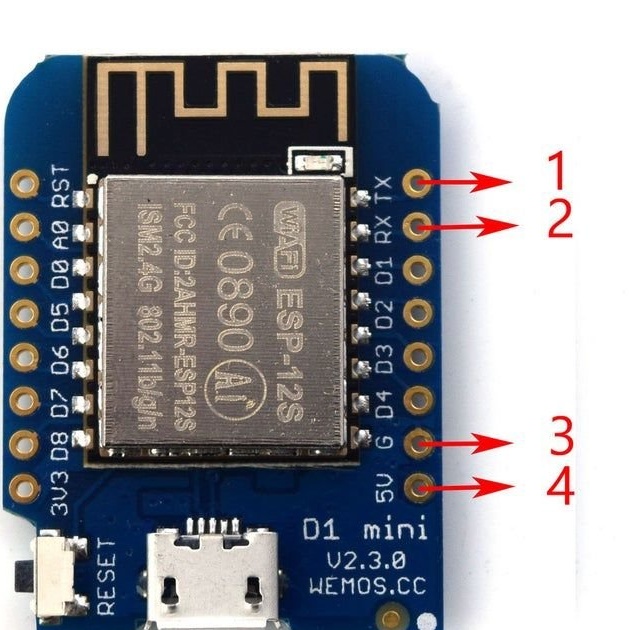
4.no pino Wemos D1 mini G
5. para Wemos 5v
6. para o Wemos D1 RX
7. Wemos TX
Os servoconversores estão conectados aos pinos 8 a 13.
Instale o código no NodeMCU. Você pode fazer o download aqui.
O WeMos D1 mini é o cartão Wi-Fi ESP8266 mínimo.
Usando o wemos D1 mini como um ponto de acesso WIFI, você pode enviar um comando serial para o servo controlador. Tudo o que é necessário é apenas fazer o flash da placa nodeMCU com o código e você pode conectar o smartphone ao nodeMCU AP. Em seguida, usando um navegador da web, vá para http://192.168.4.1.
É importante.
quando você liga o servo, todos os servos passam para a posição original / padrão
instale os servos com a maior precisão possível, conforme mostrado na figura acima ou no vídeo
ajuste a posição das articulações, desligue e ligue o dispositivo novamente para garantir que todas as pernas estejam na posição correta
se as juntas agarrarem, esfregue, ajuste a posição.
Passo Quatro: A Torre
Agora nos voltamos para a montagem da torre.
Primeiro, os detalhes da torre precisam ser impressos. Você pode baixar arquivos neste o link.
Então o mestre passa a montar a torre. O circuito para girar a torre e conectar as partes elétricas está abaixo.
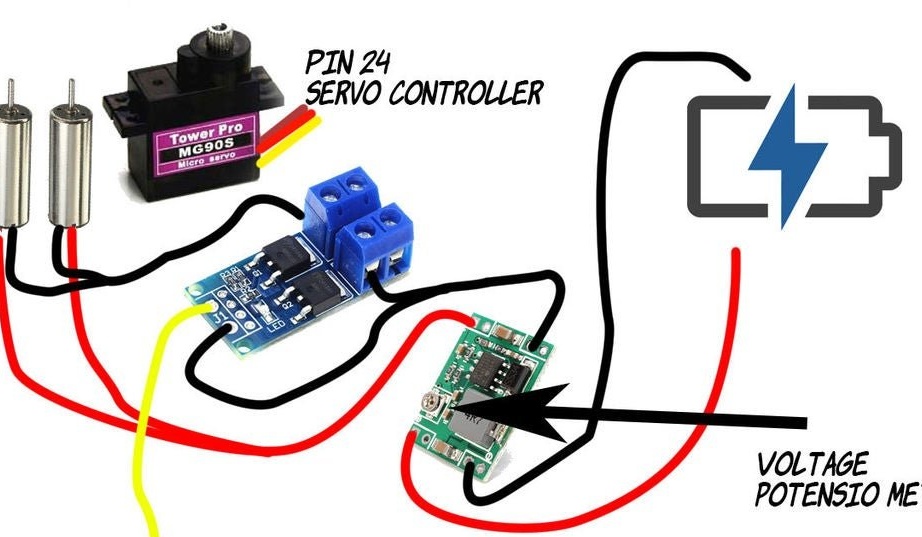
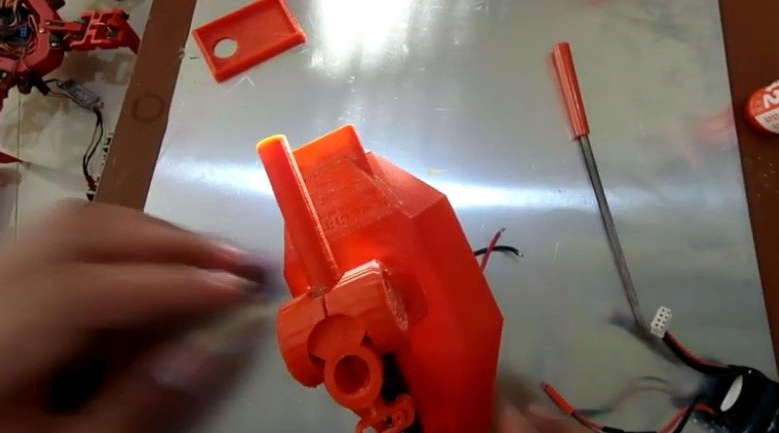
Instala um servo na torre.







A fita dupla face adere aos roletes.


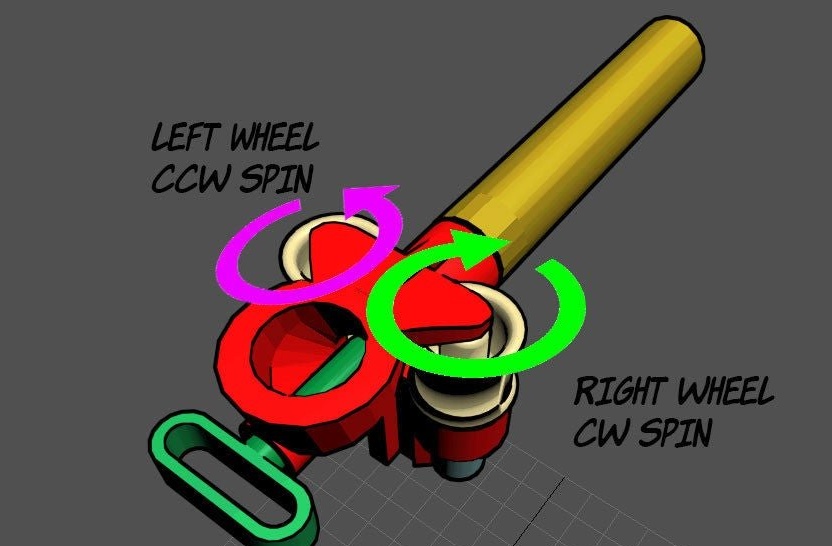
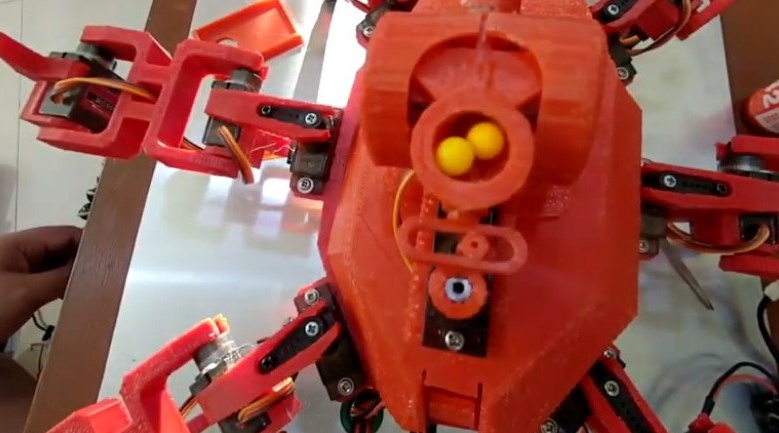
Recolhe uma arma. Instala motores em um suporte. Instala os rolos nos eixos do motor.








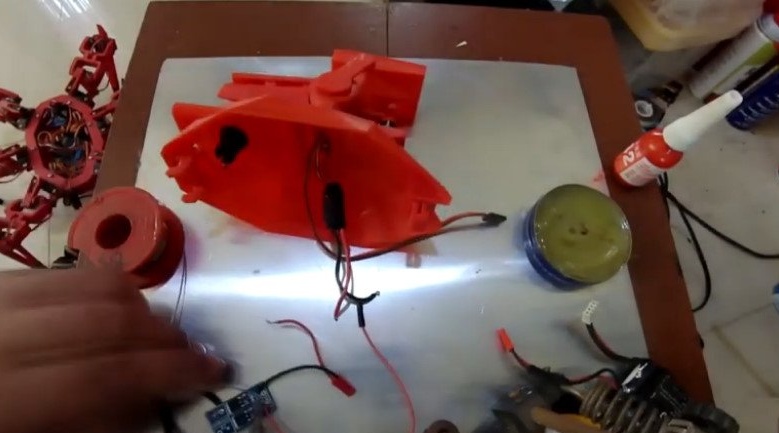
Conecta os fios e recolhe a torre.




Carrega cartuchos e verifica o funcionamento da pistola. O mecanismo pode ser ajustado movendo o suporte no eixo servo.


Faz a conexão final, montagem e inspeção.




Vídeo com a montagem da torre pode ser visto abaixo.
Está tudo pronto. Reúna mais um desses robopauk e você pode organizar brigas.
