
Hoje temos outro produto caseiro da AlexGyver (canal do YouTube "AlexGyver").


É o robô barman. E depois de ler este artigo até o final, você aprenderá como montar esse dispositivo em casa literalmente no joelho faça você mesmo.
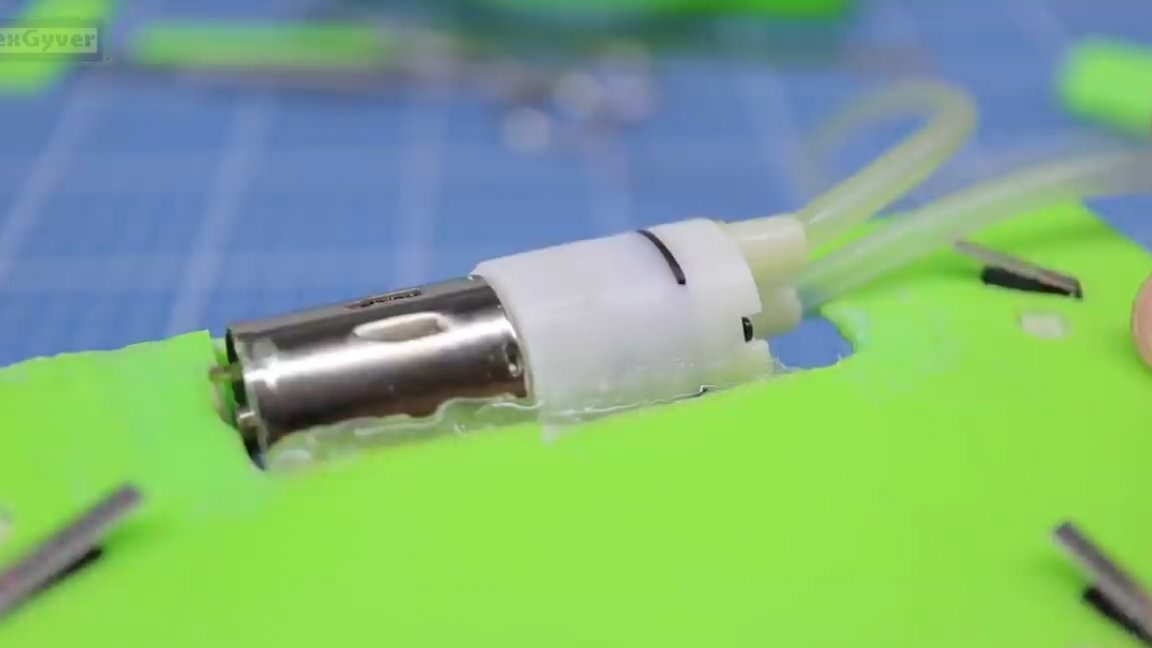
Portanto, o nalivador é um dispositivo que derrama bebidas em copos. Este dispositivo deve necessariamente conter uma bomba, ou seja, com um alimento especial, de preferência. Eu passei por várias bombas diferentes com o Aliexpress, o autor decidiu por essa membrana:

Além disso, tudo escrito: comida. O interior é todo de plástico, a unidade funciona devido à distorção da cabeça e das válvulas. Se alguém quiser pensar na direção das bombas peristálticas - corro para incomodá-lo, elas são muito barulhentas, lentas e têm um jato mais ou menos.
Em seguida, o mecanismo giratório.
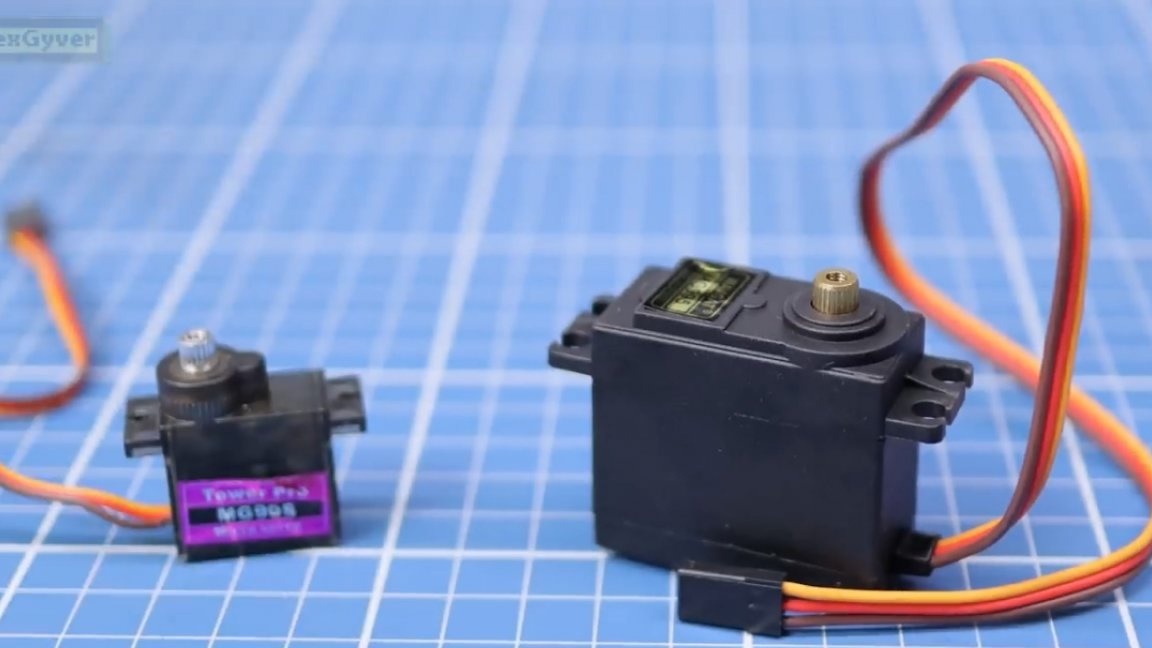
Tudo aqui está claro. Para indicar a condição dos copos que vamos usar.
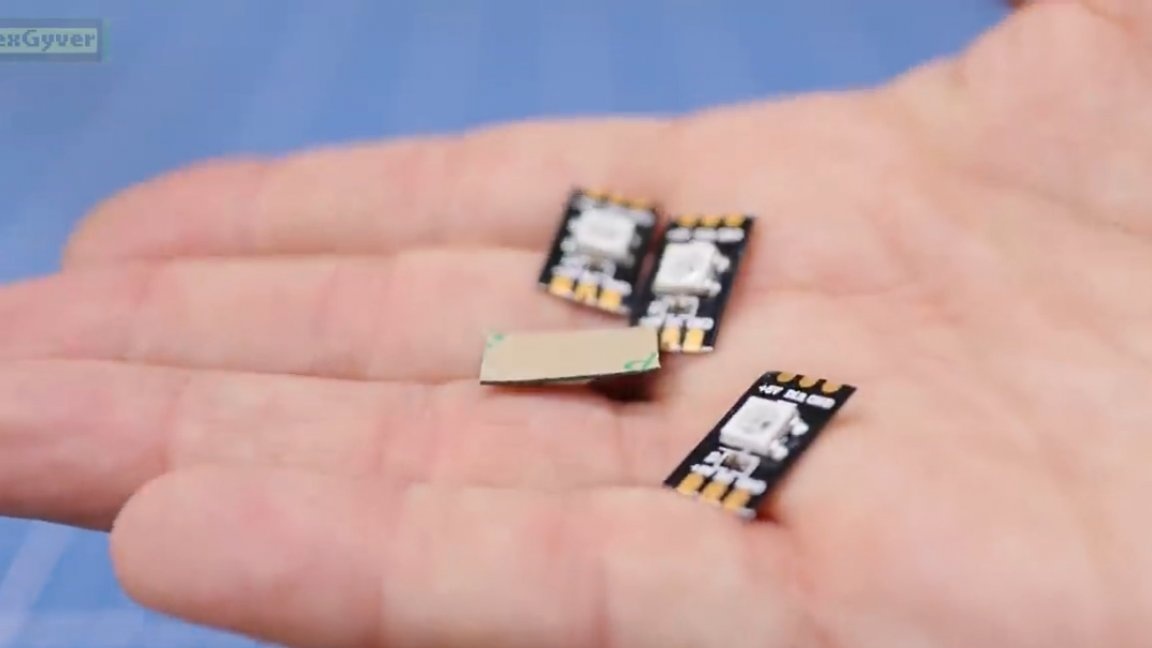
Ainda será mais fácil com eles do que com os LEDs RGB tricolores comuns, especialmente porque eles podem ser praticamente implementados nesta versão:

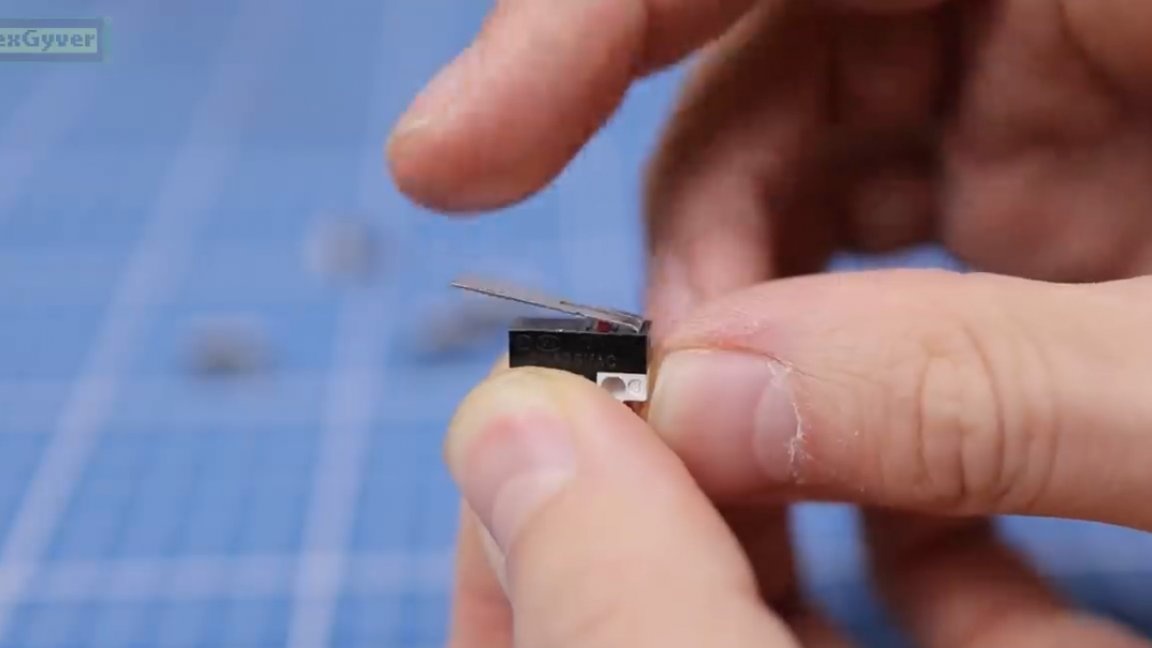
Para controlar (rastrear) a presença de xícaras, o autor decidiu levar, também são botões de finalização.
Além disso, para controlar o sistema, precisamos e, também

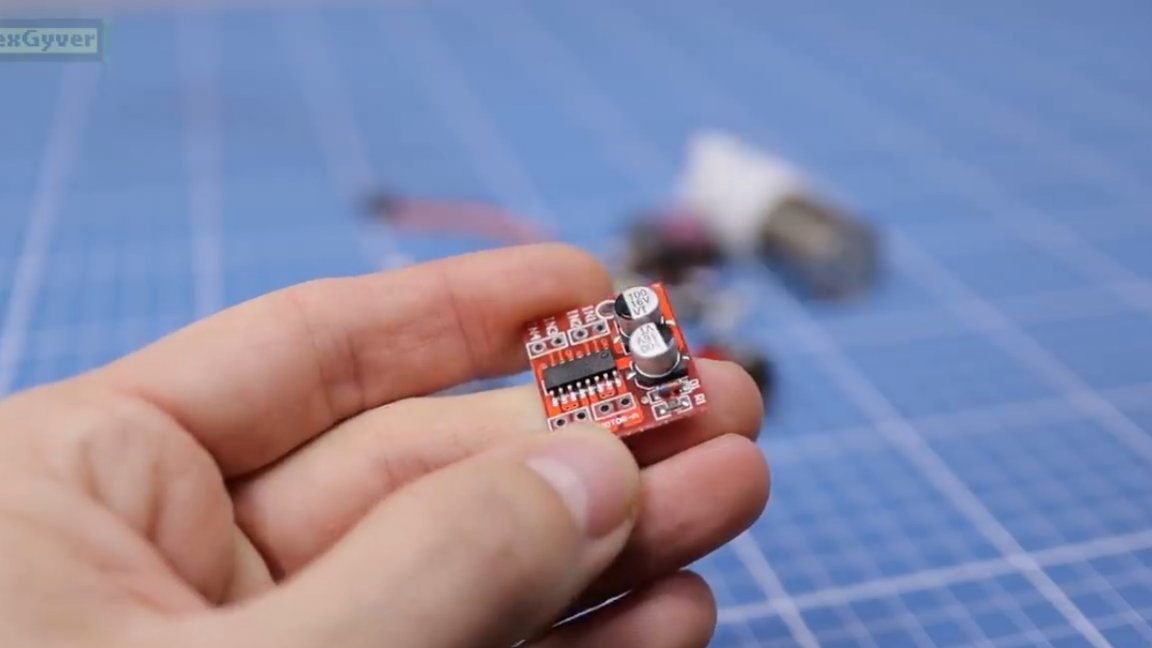
Para controlar a bomba e a energia do inversor, usaremos este
E para gerenciar todo esse negócio será o que iremos programar de uma maneira especial.
A propósito, o dispositivo será alimentado e, para isso, você precisará deste
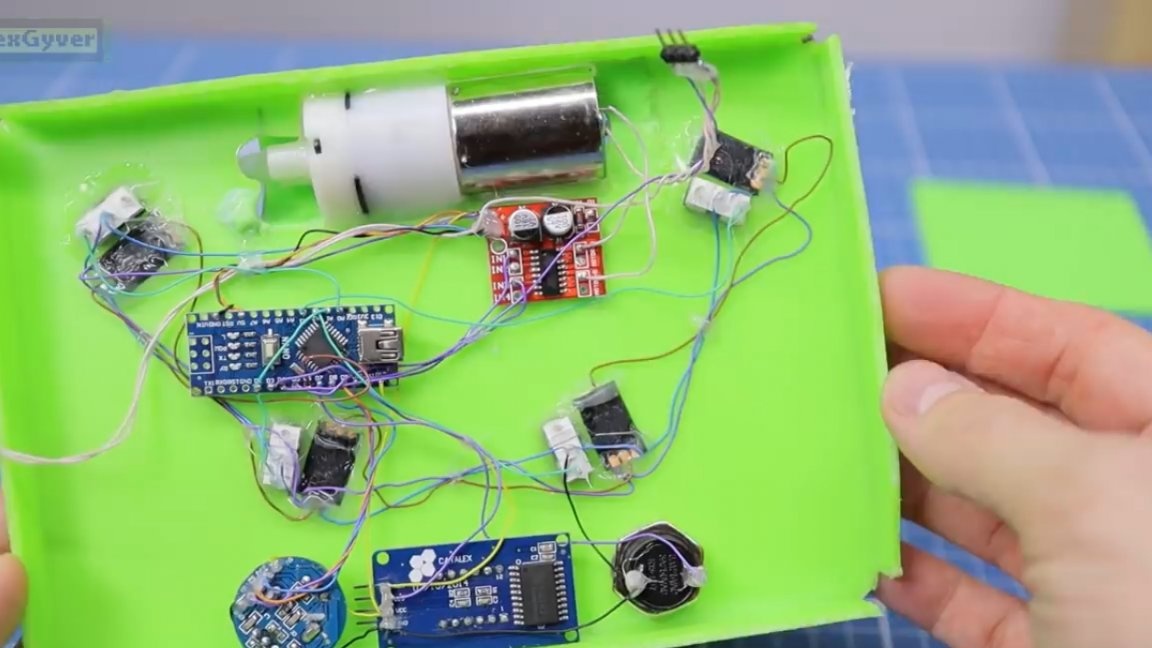
Na verdade, isso é tudo eletrônica. Abaixo estão todos componentes eletrônicos necessários em ordem:
1)
2)
3)
4)
5)
6)
7)
8)
9) .
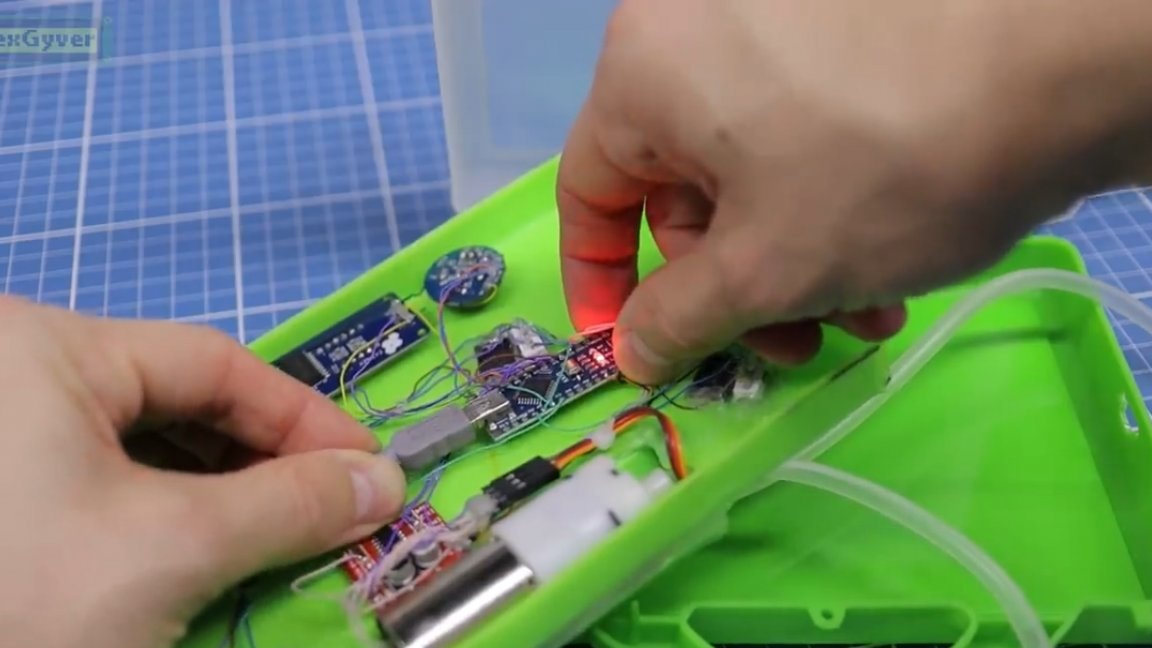
Eletrônica conecta de acordo com o seguinte esquema:
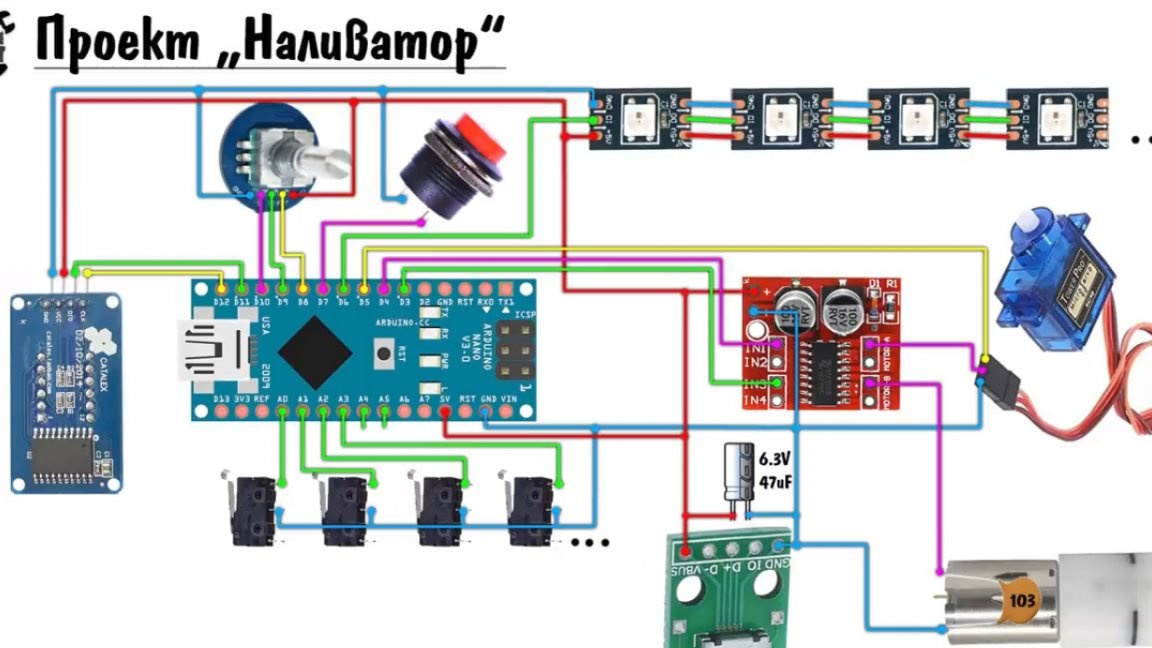
Como você pode ver, não há nada particularmente complicado aqui. A energia servo é isolada através do driver. Isso é necessário para que você possa desconectar o servo da energia, reduzindo assim o consumo de energia e os sons que ele emite. Além disso, esta máquina suporta o trabalho com o número de óculos de 1 a 6 peças, para que você precise soldar na ordem de quantos LEDs e botões forem necessários e tudo o mais é configurado diretamente no próprio programa.
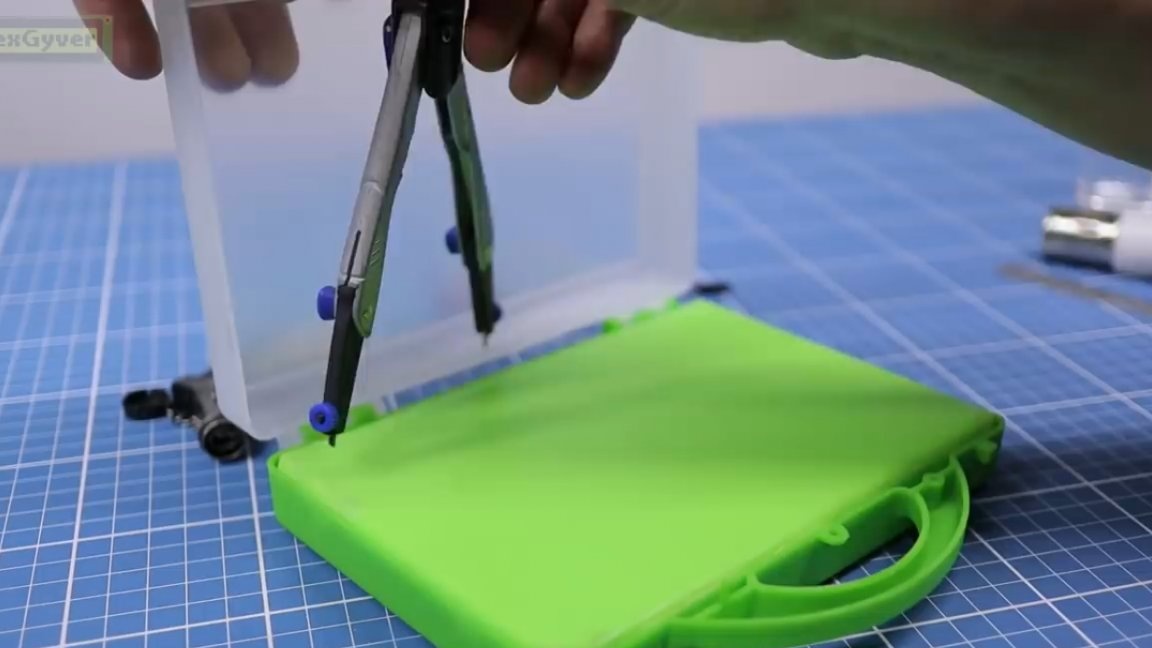
Esse caso com uma chave de fenda da Fix Price desempenhará perfeitamente o papel do caso:

Chaves de fenda-se sobre nada, você pode jogá-los fora. Também precisamos de plástico, por exemplo, uma tábua de cortar.

Foi comprado em uma loja de ferragens local. A espessura do plástico aqui é de cerca de 2 mm.
Em seguida é o tubo. O autor encontrou um adequado novamente na correção.Você também precisará de um tubo de silicone para aquaristas:

Próximos copos, por exemplo, assim:

Começamos fazendo medições e fazendo peças de um pedaço de plástico que será inserido na mala e nos permitirá colocar todos os eletrônicos em um fundo tão secreto.

Depois, estimamos a trajetória do tubo e experimentamos os copos. O autor fez um modelo no qual marcou a janela do botão e o orifício do LED.

Usando um ferro de solda de spray fixo com uma ponta costurada, você pode cortar plástico como manteiga.

Agora instalamos os botões e prendemos usando uma pistola de cola quente.
Em seguida, prossiga para a soldagem. Você terá que soldar muito. Começamos com LEDs e botões. A propósito, os LEDs devem ser preenchidos com cola quente e também por cima para obter um tipo de difusor.

Novamente, o modelo, perfure, queime e coloque tudo em seu lugar.

Em seguida, você precisa fixar o tubo na bomba. Para fazer isso, você pode aquecer o tubo em água quente ou usar um isqueiro. Em seguida, a bomba é colada em uma janela cortada especialmente para ela e, por cima, é coberta com uma blindagem semicircular feita do mesmo plástico.

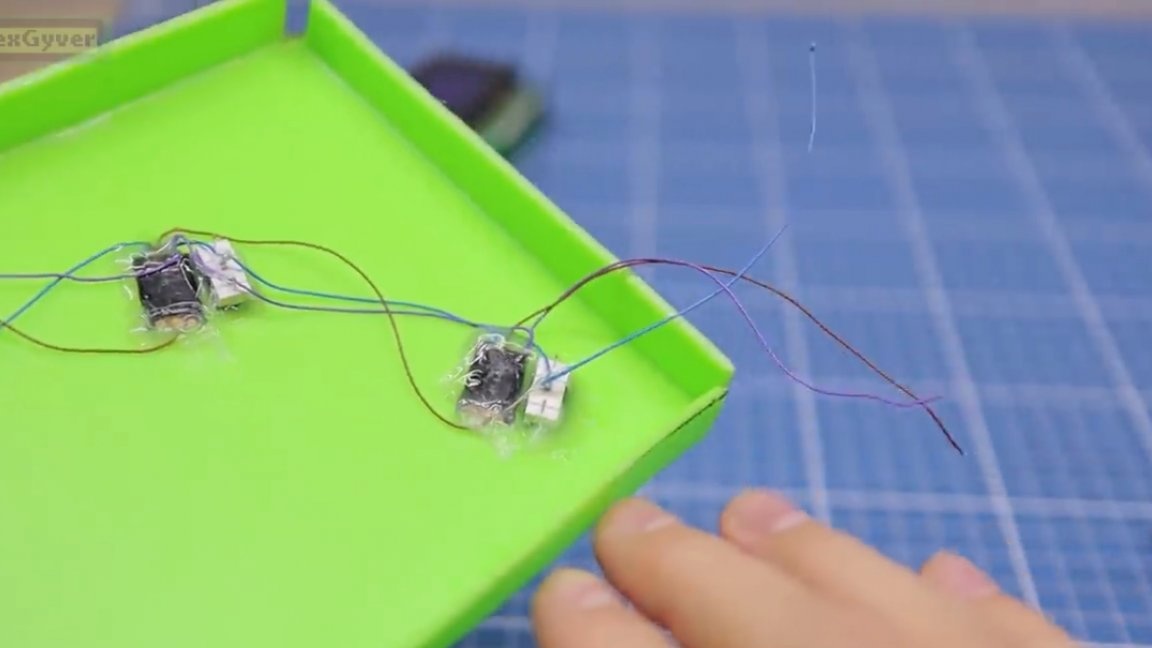
Em seguida, simplesmente soldamos tudo de acordo com o esquema.
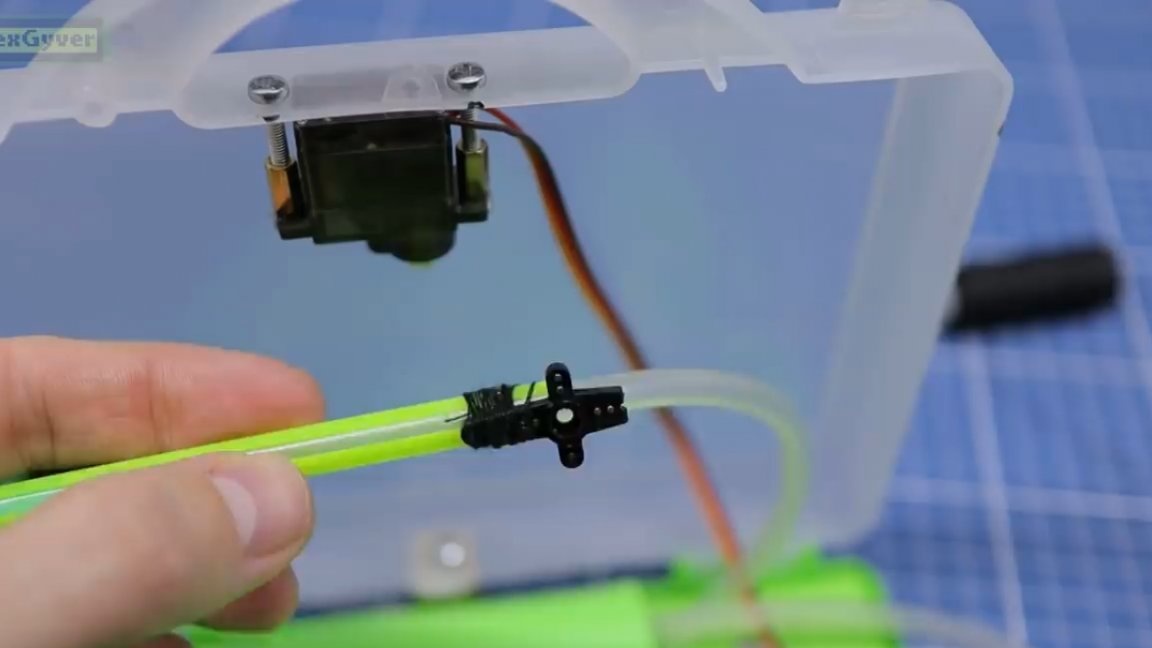
O servo estará localizado na parte superior da tampa da mala. O autor usou racks para placas de circuito impresso para isso, e você pode corrigi-lo com parafusos M3 longos.
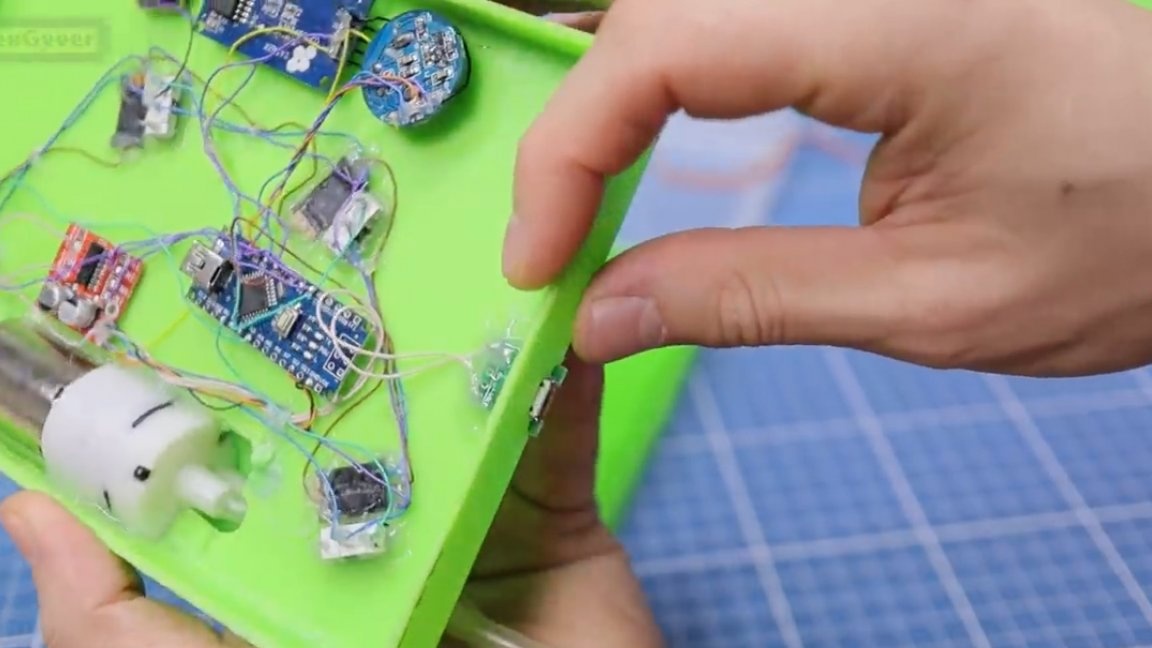
Em seguida, retiramos o soquete USB pelo orifício feito no plástico.
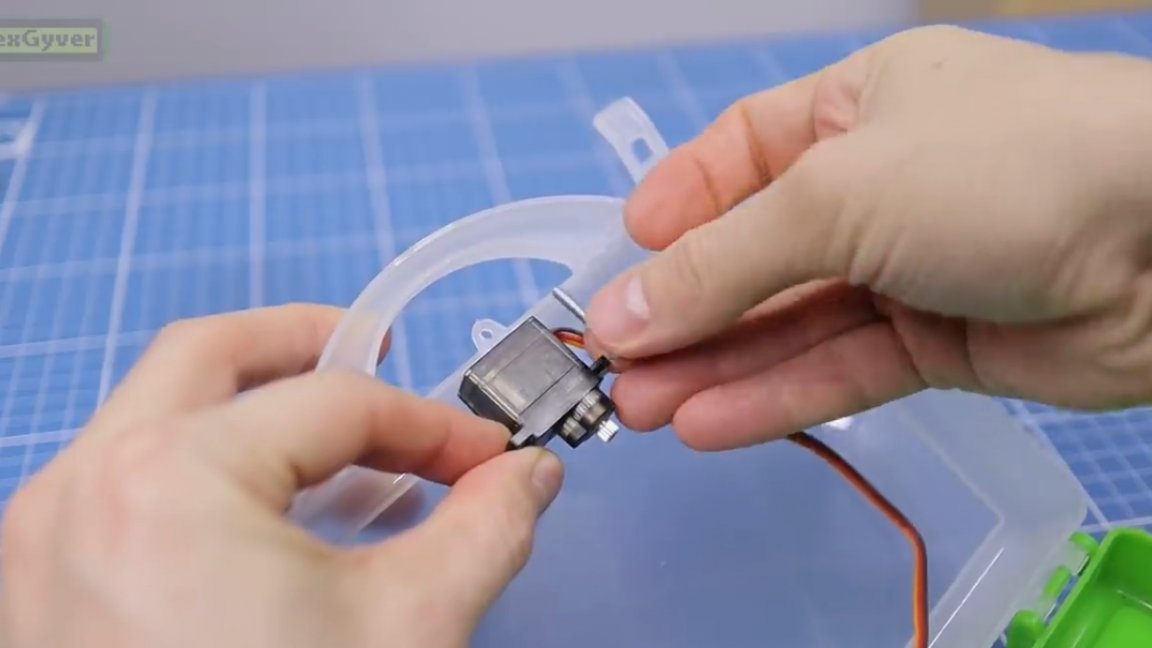
Agora faça uma torneira:

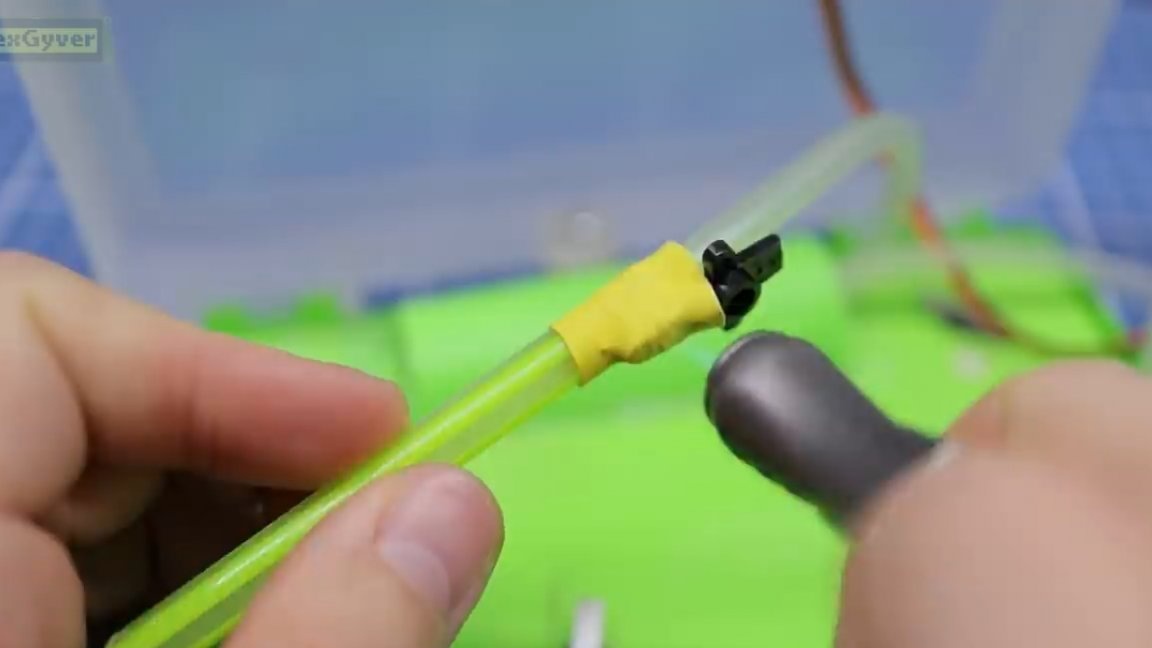
Fixamos nosso tubo no agitador do servoconversor das melhores maneiras conhecidas pela humanidade: fios e supercola.
Para não parecer uma “fazenda coletiva”, usaremos o encolhimento pelo calor.
Bem, outra questão! Resta fazer a fixação da tampa com a ajuda de um canto e um ímã colado à supercola. Funciona perfeitamente, parece tecnicamente e geralmente bastante conveniente.

Nós descobrimos o ferro, resta carregar o firmware no Arduino.
Faça o download do arquivo. Além disso, o arquivo com o software necessário está disponível em página do projeto.
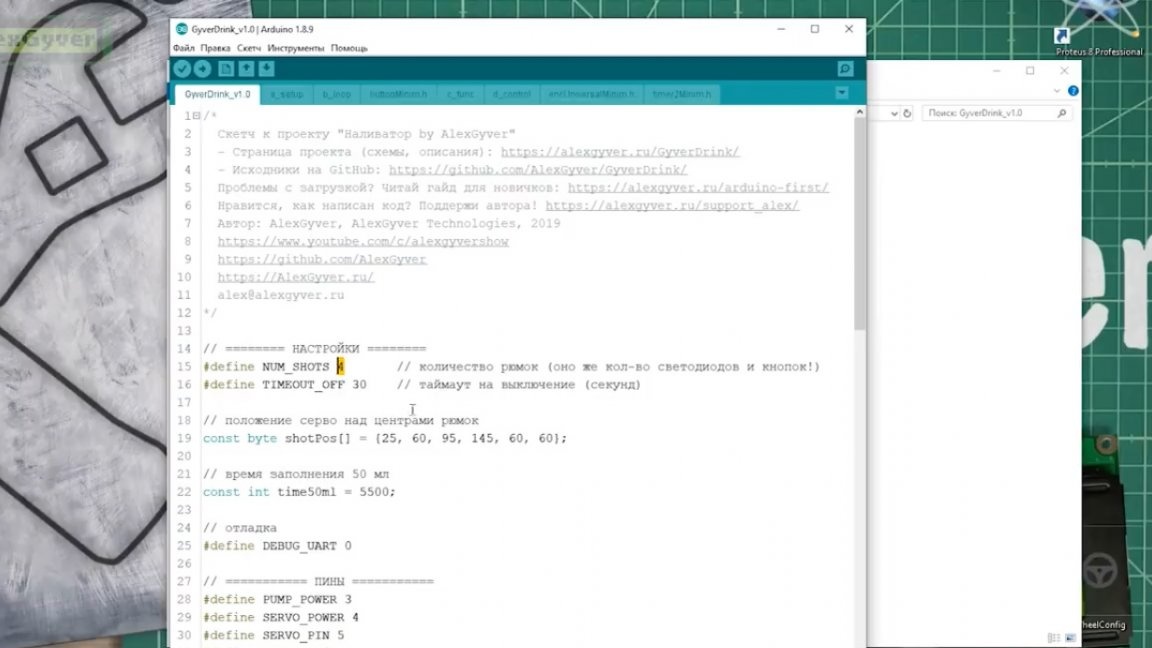
Lá você também encontrará instruções detalhadas para baixar o firmware. De fato, tudo é simples lá. Você precisa instalar o programa, conectar a placa Arduino nano ao computador, abrir o arquivo de firmware, indicar o número de óculos (de 1 a 6) e clicar no botão de download.
Em seguida, prossiga para a calibração. Para fazer isso, mantenha pressionado o botão grande e ligue o sistema. A linha "serviço" será exibida no visor, o que significa que o sistema está no modo de serviço.

O modo de serviço permite que você gire manualmente a torneira, enquanto o ângulo de rotação será exibido.
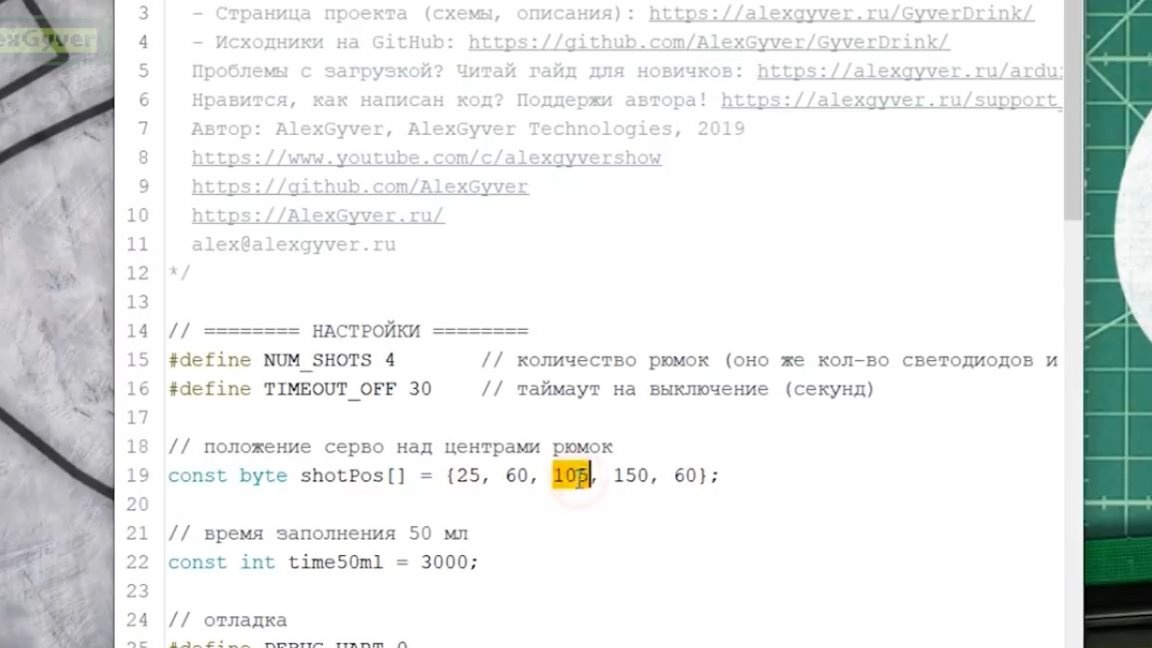
Agora você precisa dirigir a torneira através de todos os copos e lembrar o ângulo de cada um.

Os valores obtidos dos ângulos precisarão ser inseridos no firmware aqui, na ordem de zero:
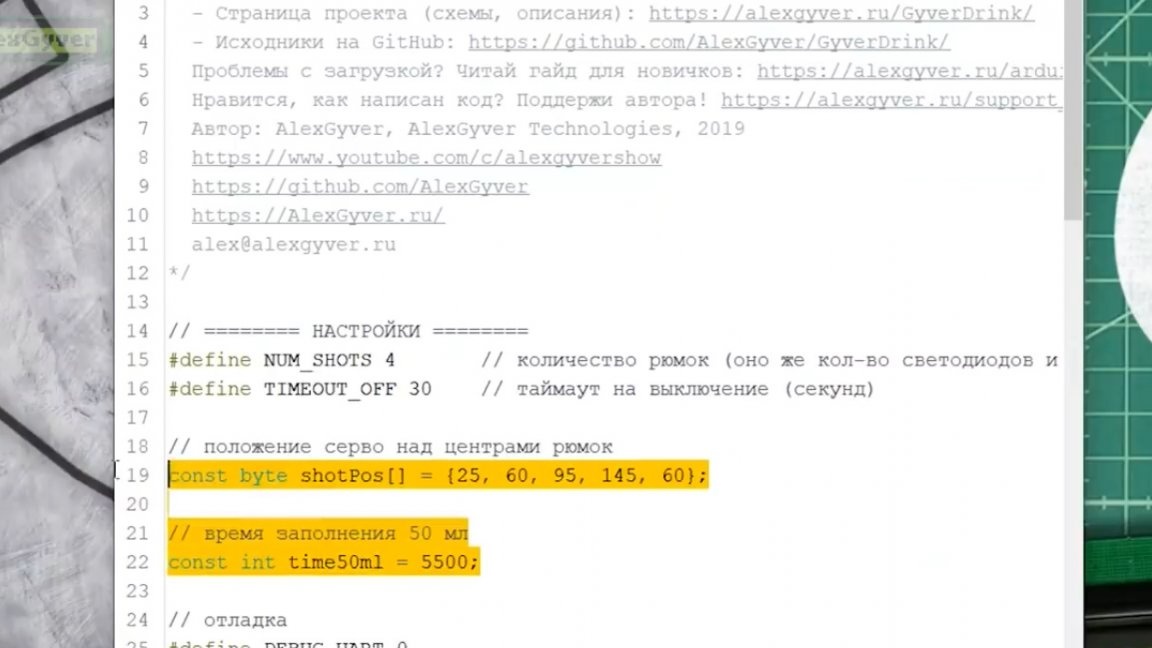
Em seguida, precisamos derramar exatamente 50 ml de líquido e descobrir o tempo durante o qual esse procedimento ocorre.
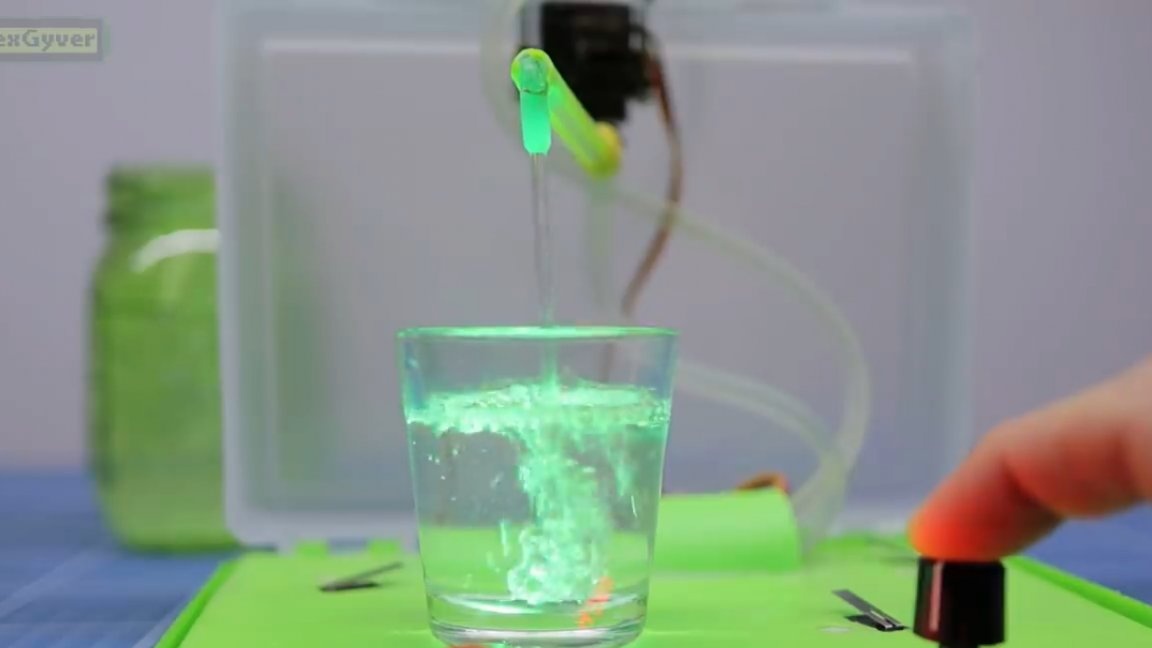
5,5 segundos. O número resultante é inserido aqui, são milissegundos:
Calibração concluída. Faça o download do firmware calibrado para o sistema.
Então, como usá-lo. Abrimos, trazemos água e, enquanto pressionamos o botão do codificador, dirigimos a água através do tubo.
No momento, nosso sistema está no modo manual, a letra R. Ou seja, colocamos as xícaras, ajustamos o volume e pressionamos o botão. Em seguida, o preenchedor faz seu trabalho.

Depois de encher o copo, o aparelho procura copos vazios e também os enche, mesmo que tenham sido entregues antes do final do ciclo de vazamento.
Há também um segundo modo - automático, para alternar, você precisa segurar o botão grande. Nesse modo, o sistema derrama imediatamente líquido em cada copo entregue.

Só isso. Obrigado pela atenção. Até breve!
Vídeo do autor: