
O assistente criou um dispositivo que funciona como um nível digital + régua + transferidor + fita métrica. O dispositivo é pequeno o suficiente para caber no bolso e sua bateria é facilmente carregada usando um carregador de telefone.
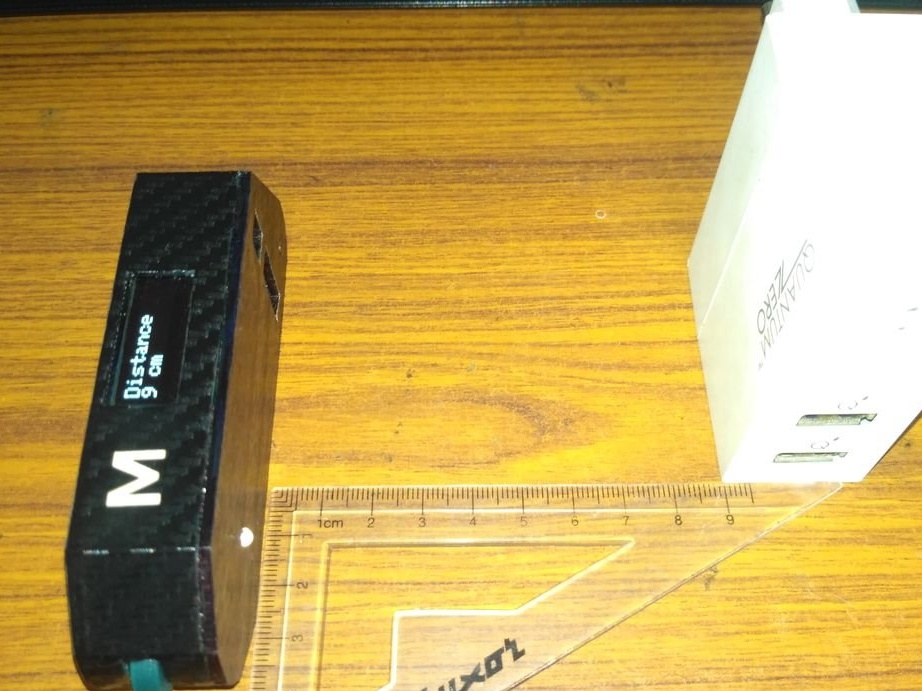
Este dispositivo usa um acelerômetro e um sensor de giroscópio para medir com precisão nível e ângulo, um sensor de infravermelho para medição sem contato de comprimento linear de 4 a 30 cm, um sensor com uma roda que pode ser rolada ao longo de uma superfície curva ou uma linha curva para medir o comprimento de um objeto.
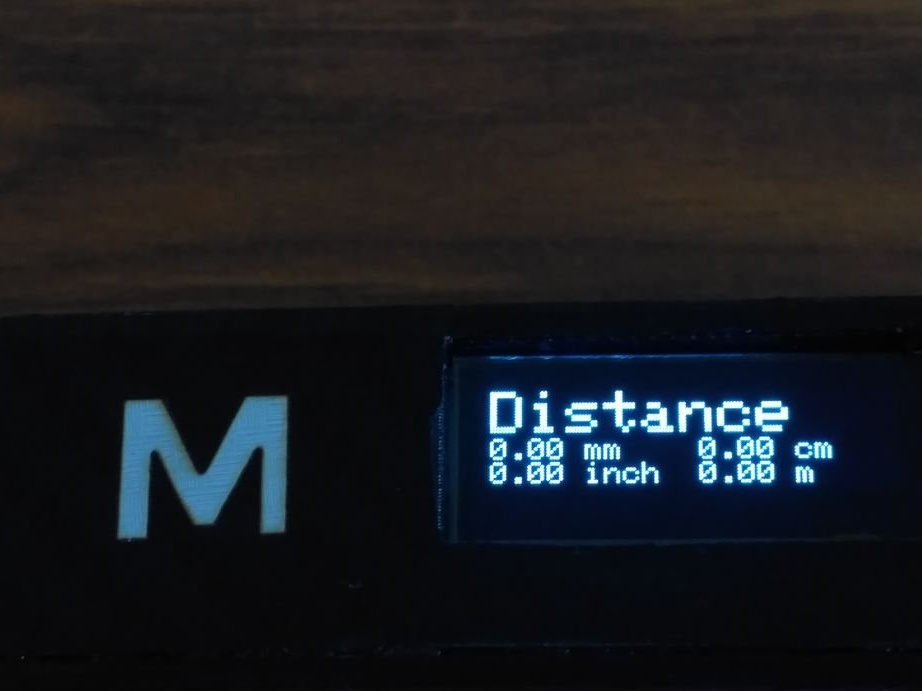
A navegação pelos modos e funções do dispositivo é realizada usando os botões de toque, designados como M (modo), U (unidade) e 0 (zero).
M - escolha entre diferentes tipos de medidas
U - para escolher entre unidades de medida mm, cm, polegadas e metro
0 - Redefina os valores medidos para 0 após medir a distância ou o ângulo.
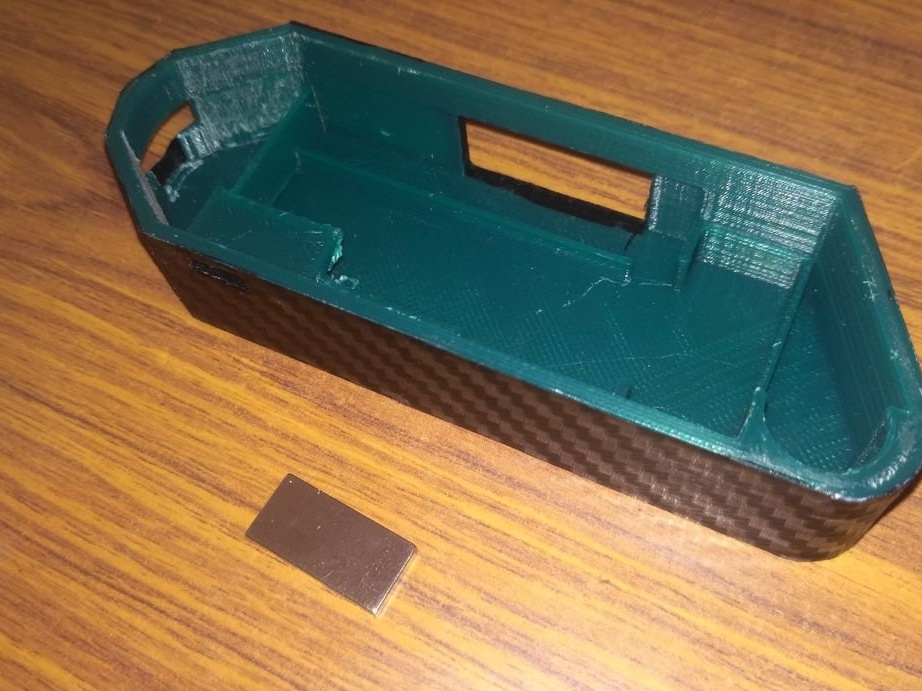
O dispositivo possui um ímã de neodímio embutido em sua base para que não escorregue e não deslize para fora da superfície de metal que está sendo medida.
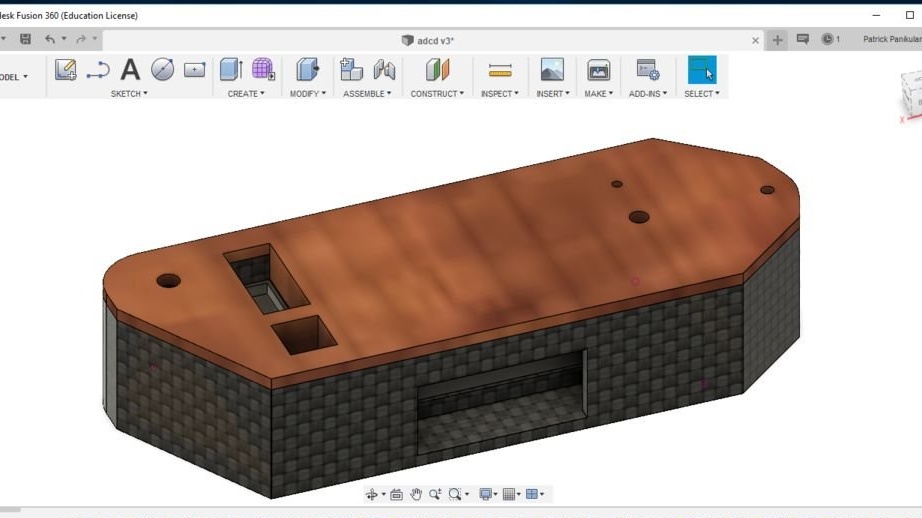
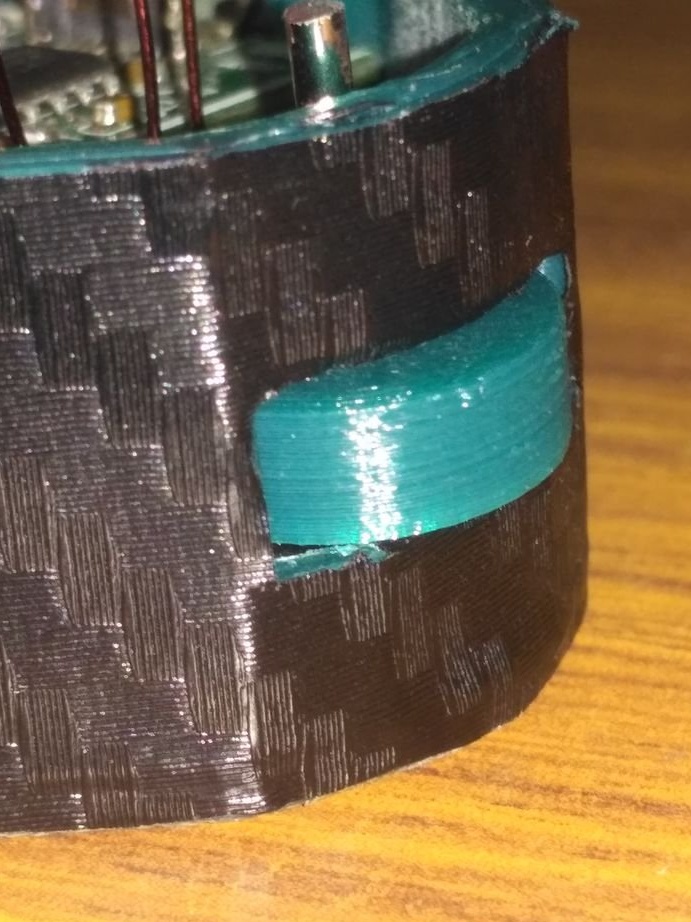
O gabinete foi projetado para tornar o dispositivo o mais compacto possível.
Vamos assistir a um vídeo com exemplos de como o dispositivo funciona.
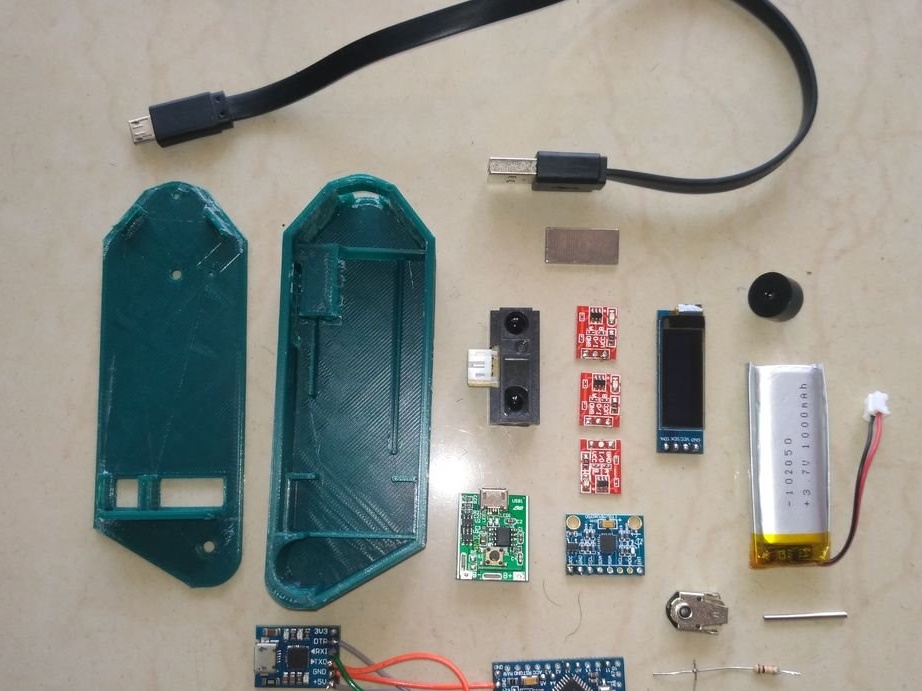
Ferramentas e materiais:
-IR sensor de distância Sharp GP2Y0A41SK0F;
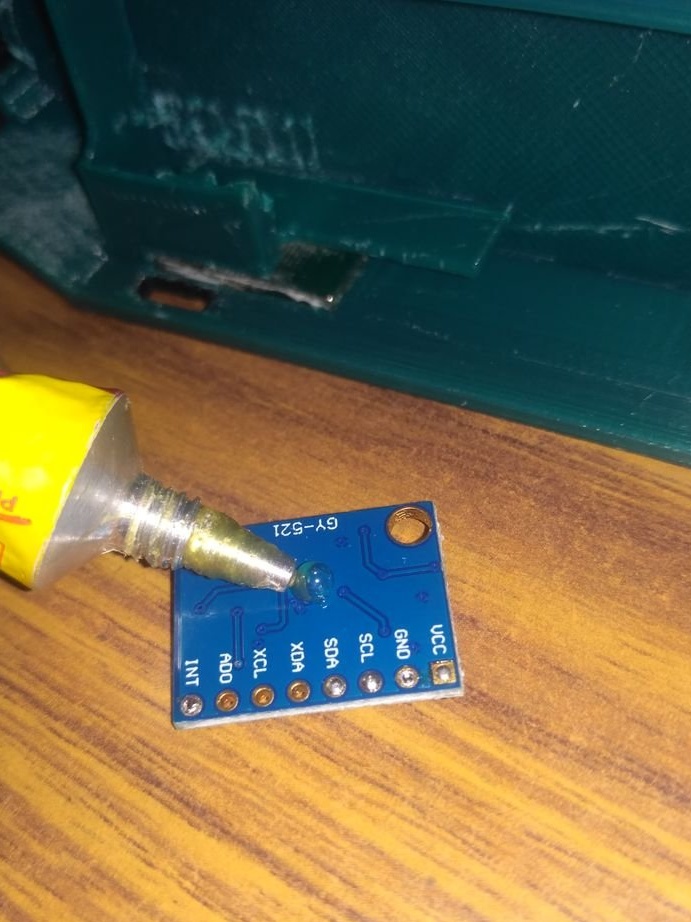
- Módulo acelerômetro / giroscópio MPU6050;
Módulo -Charge;
Codificador
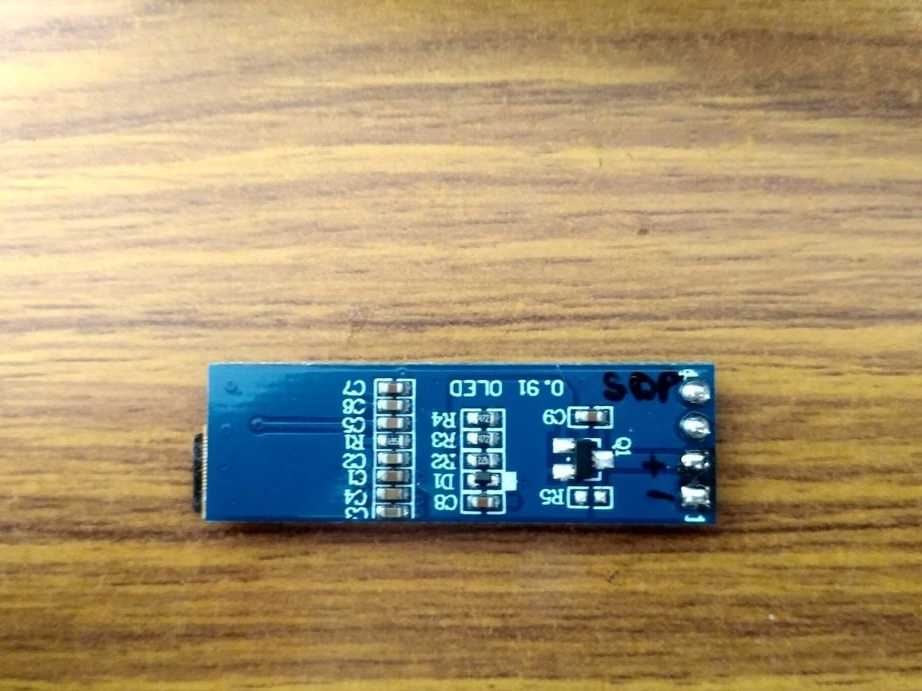
-128 X 32 display OLED;
-Arduino pro mini ATMEGA328 5 V / 16 MHz;
Campainha de -12 mm;
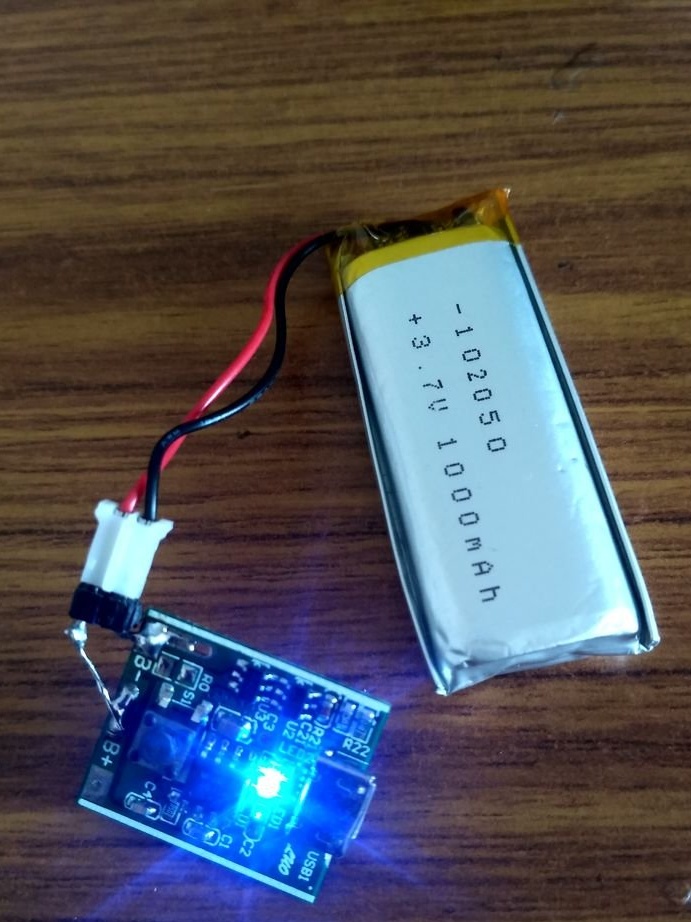
Bateria de polímero de lítio de -3,7 V, 1000 mAh;
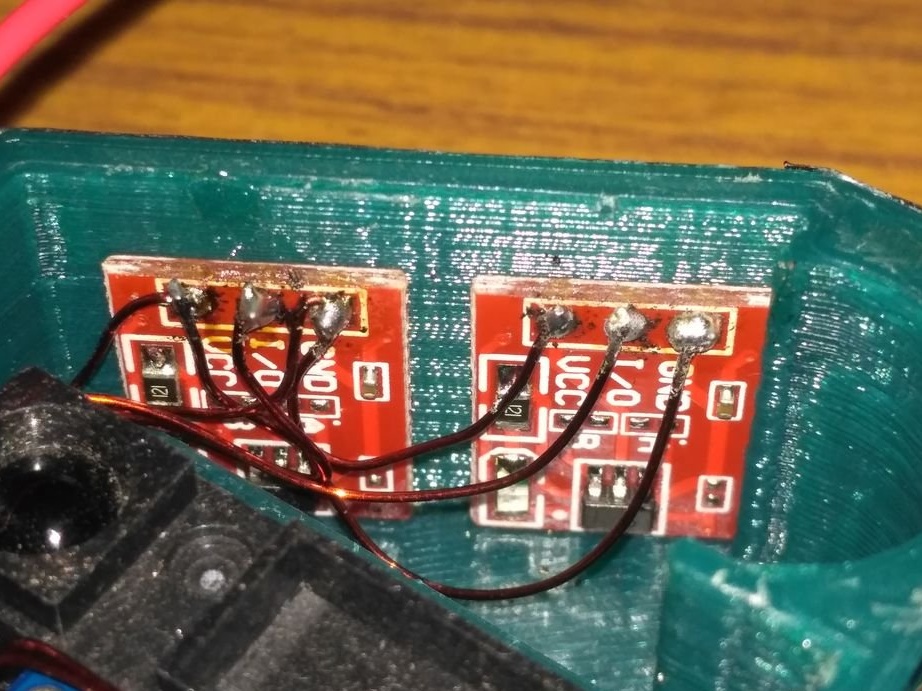
- Módulo de botão de toque TTP223 - 3 peças .;
- ímã de neodímio 20x10x2 mm;
-Conversor de interface CP2102;
Fio de cobre esmaltado;
-Resistores 10K - 2 peças;
- Barra de aço com 19 mm de comprimento e 2 mm de diâmetro;
LED -LED;
Filme de vinil;
- cabo micro USB;
- tesoura;
-Faca;
- pinças;
-Pistola de cola;
-Super cola;
Acessórios de solda;
-Cortador a laser;
- impressora 3D;
-Nippers;
-Desperdício de papel;

Etapa um: o caso
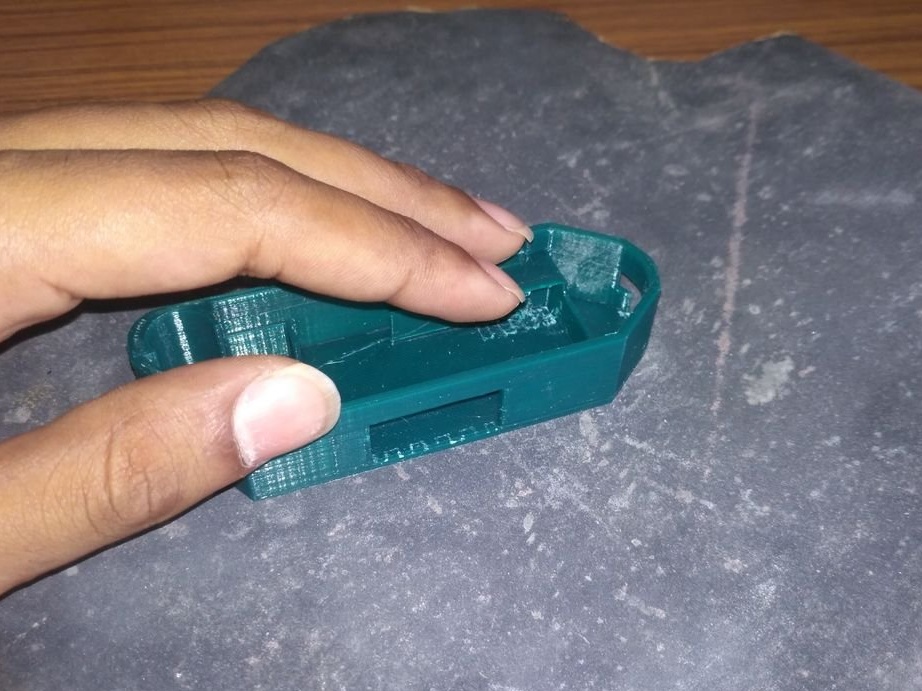
Primeiro, o assistente imprime um estojo em uma impressora 3D. Os arquivos para impressão podem ser baixados abaixo.
BODY.stl
Lid.stl
wheel.stl
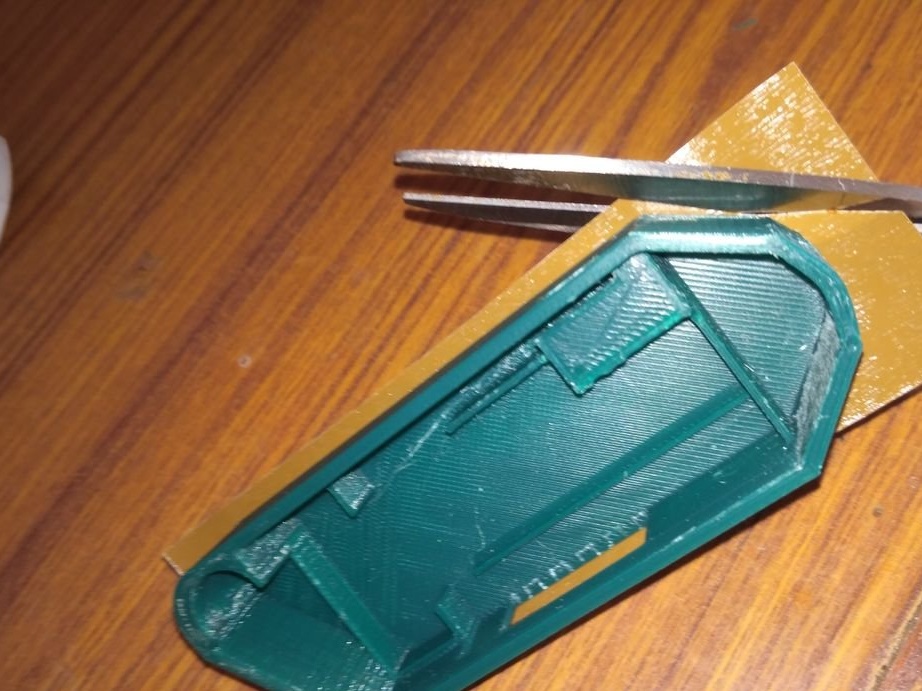
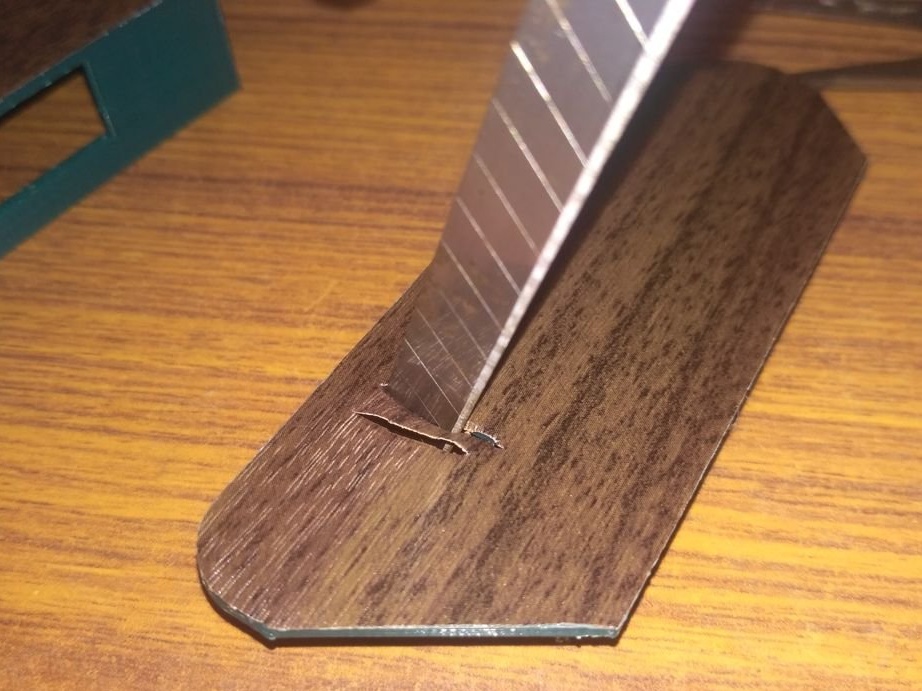
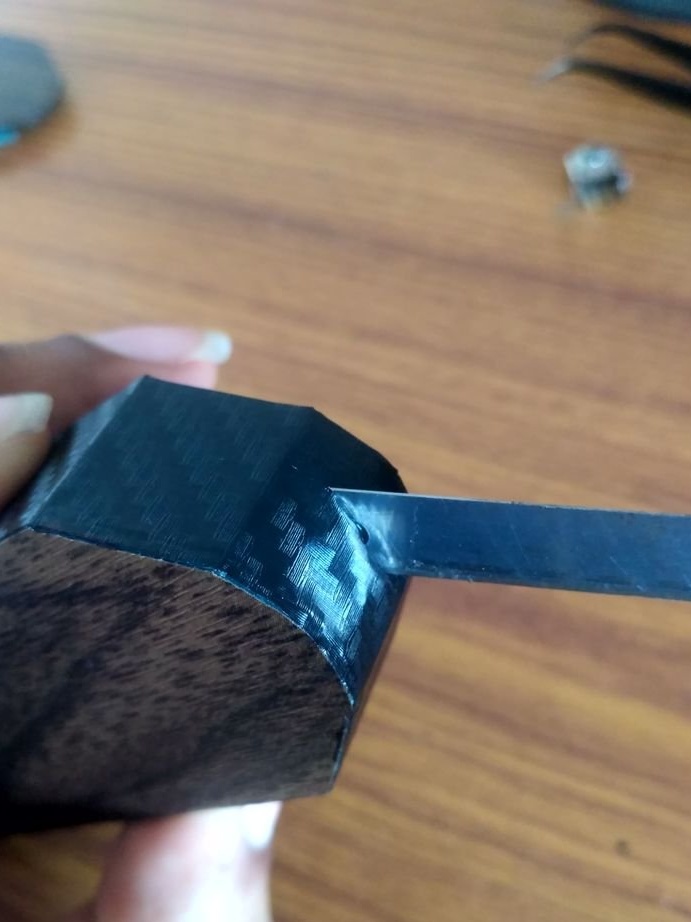
Cola o estojo com filme de vinil, lixando previamente sua superfície.







Etapa dois: esquema
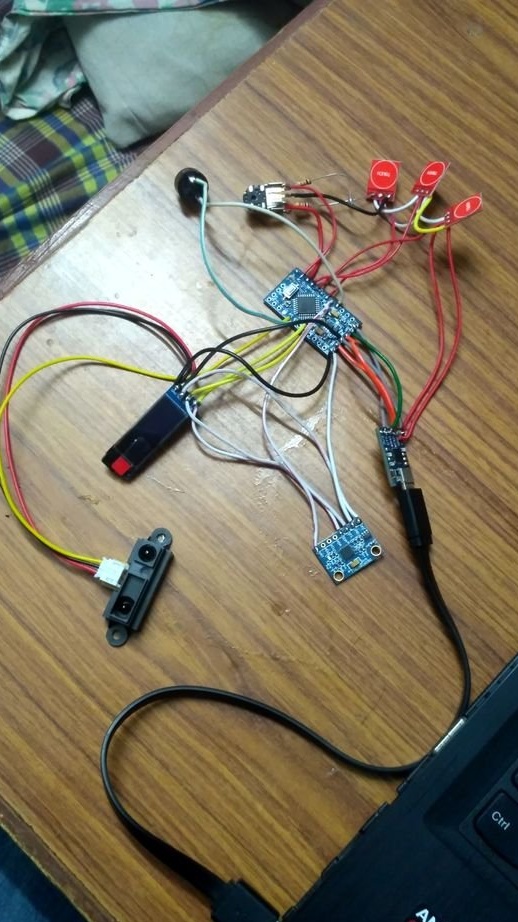
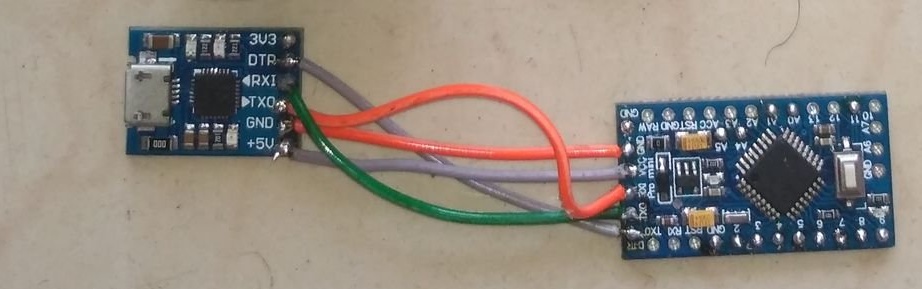
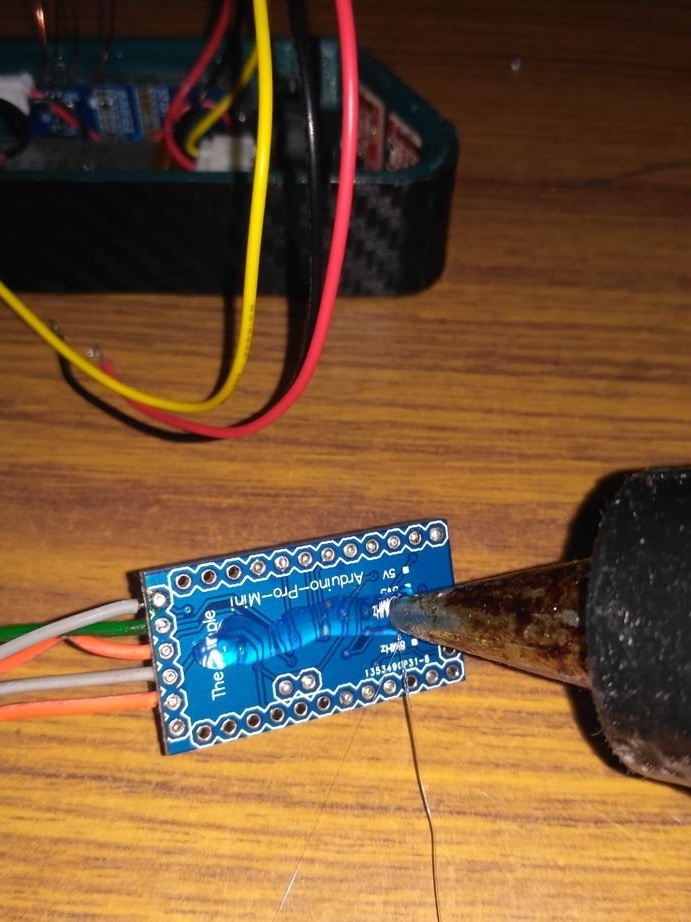
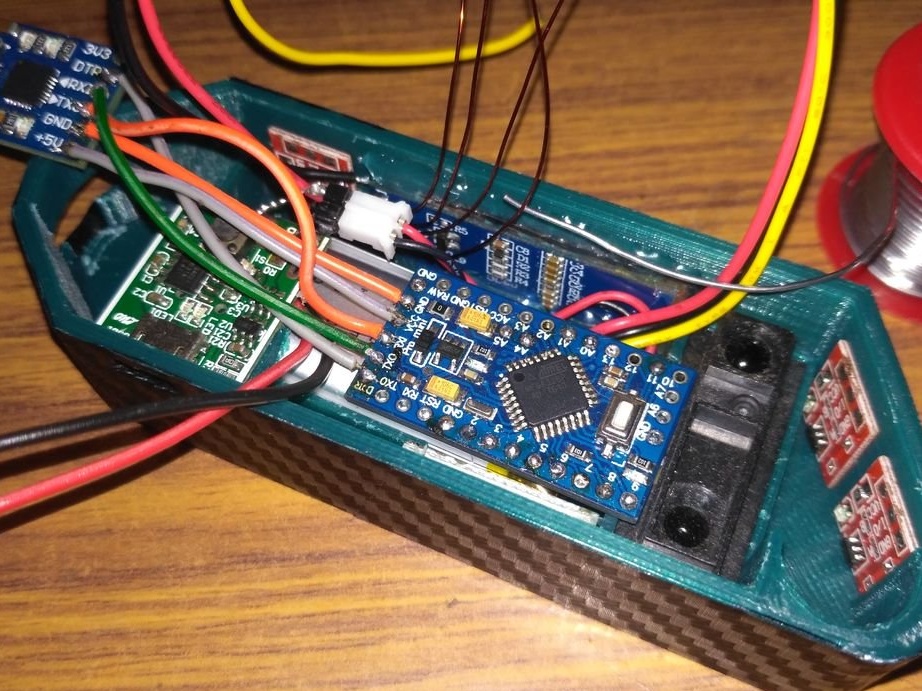
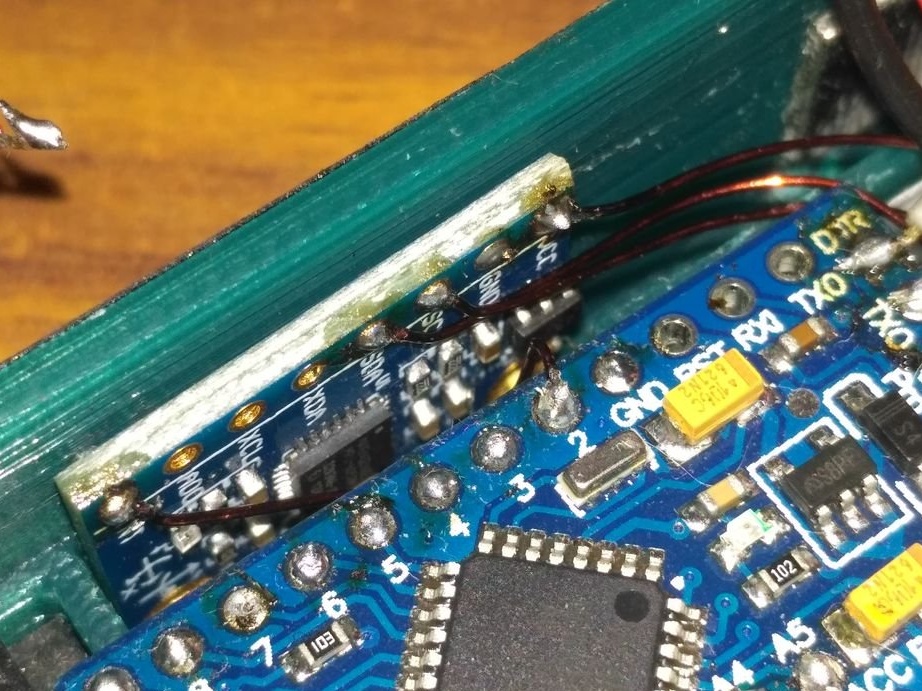
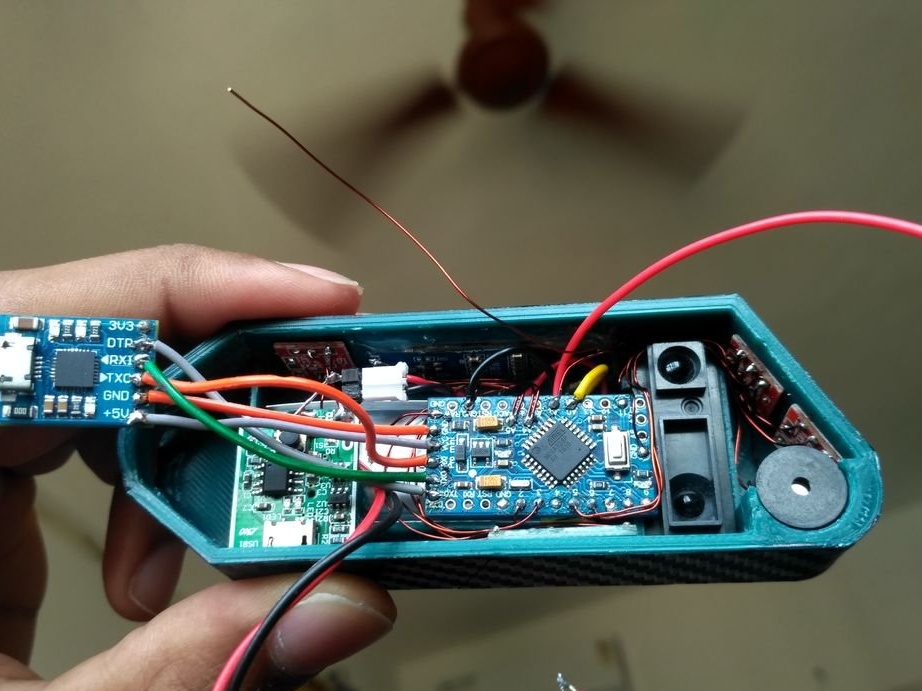
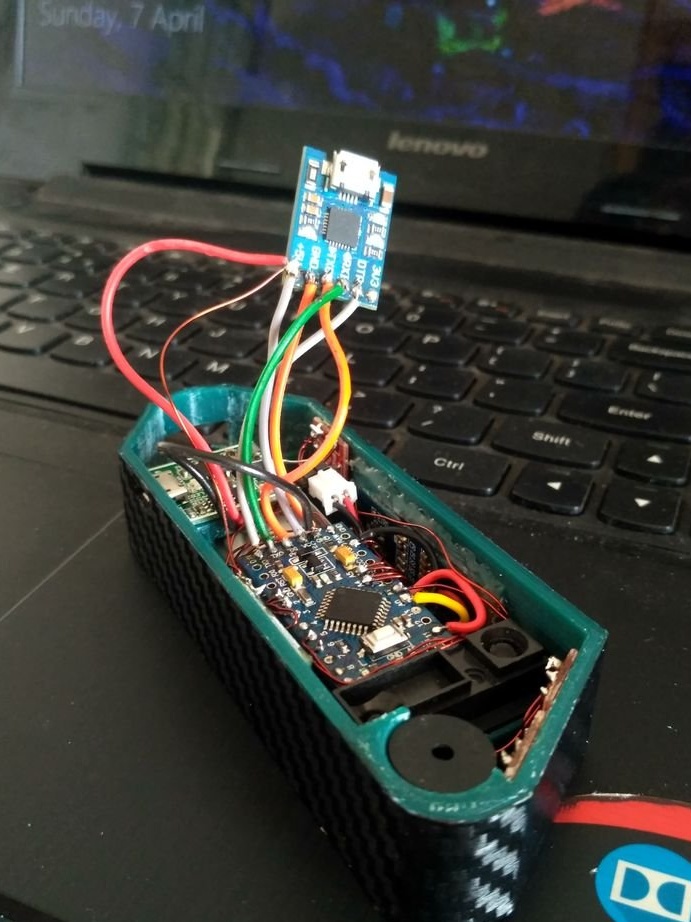
Ao contrário Arduino O nano, pro mini não pode ser programado diretamente conectando um cabo USB. Portanto, primeiro você precisa conectar um USB externo ao pro mini converter para programá-lo. A primeira foto mostra como essas conexões devem ser feitas.
Vcc - 5V
GND - GND
RXI - TXD
TXD - RXI
DTR - DTR
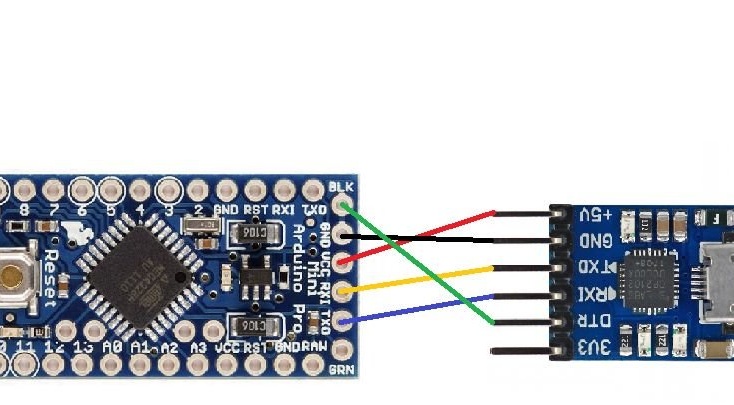
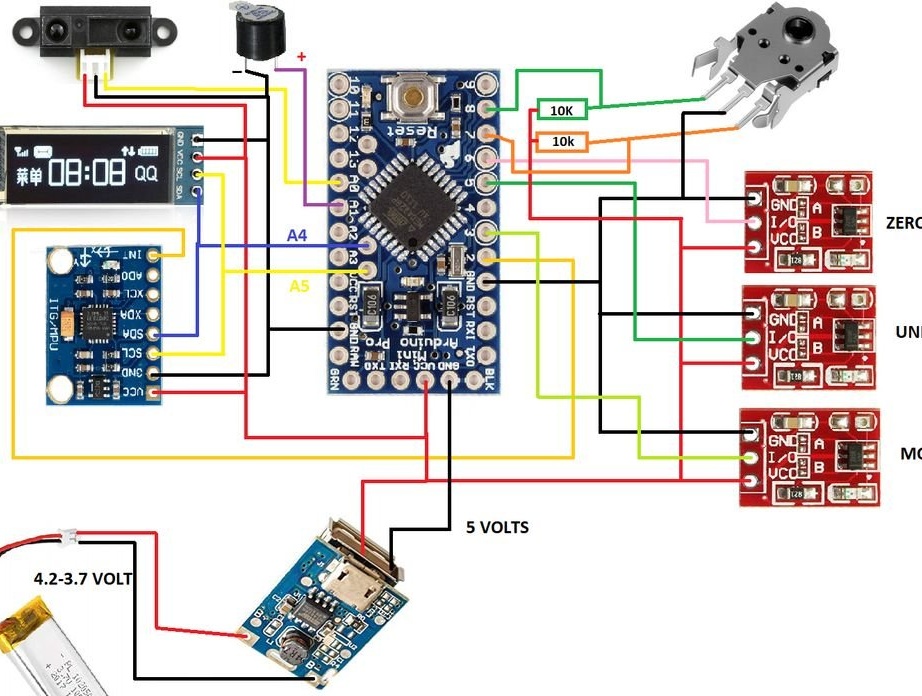
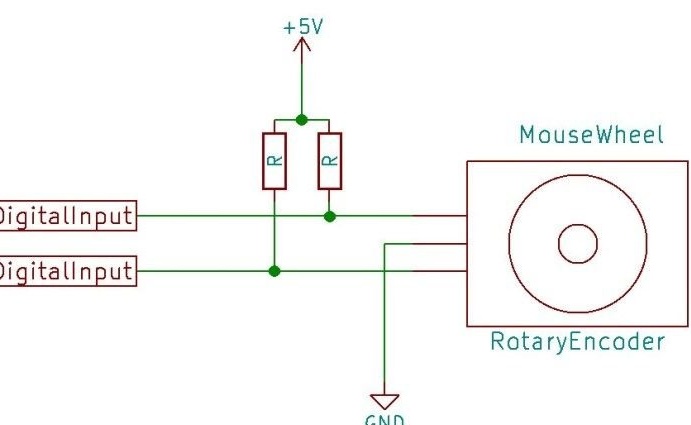
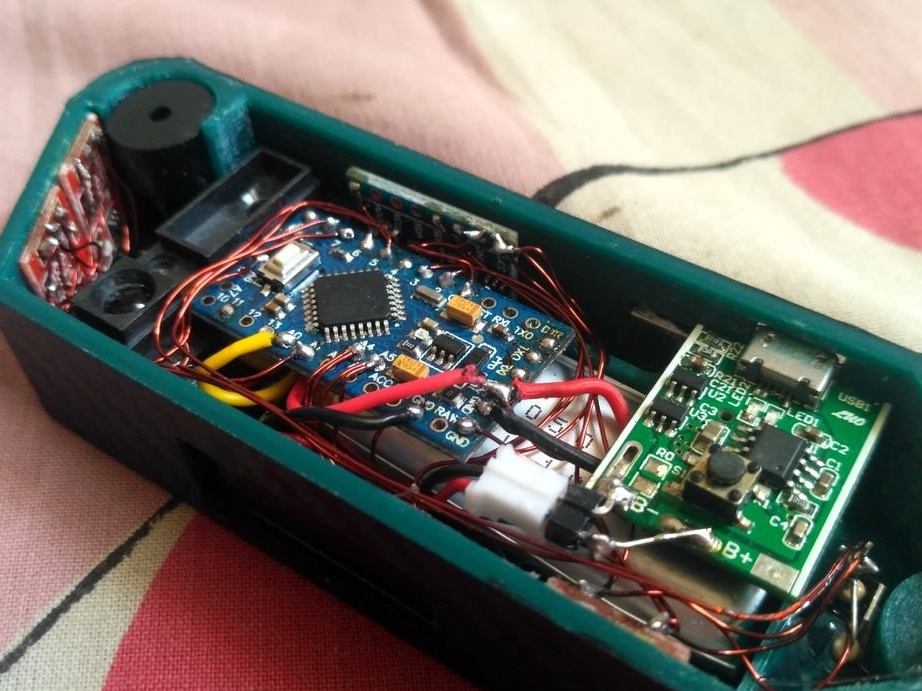
A segunda imagem mostra o diagrama completo do circuito deste projeto.
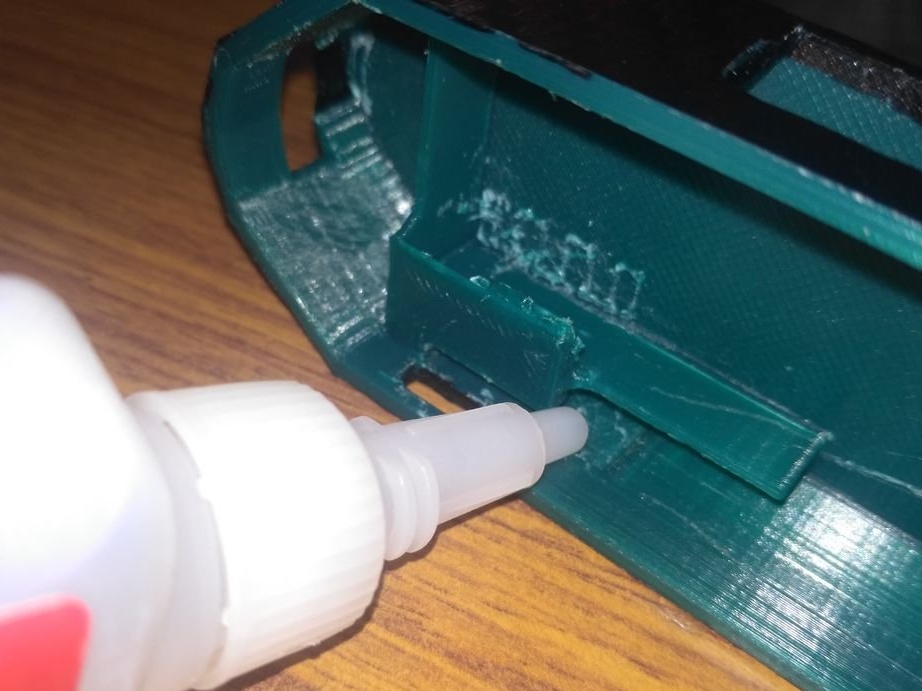
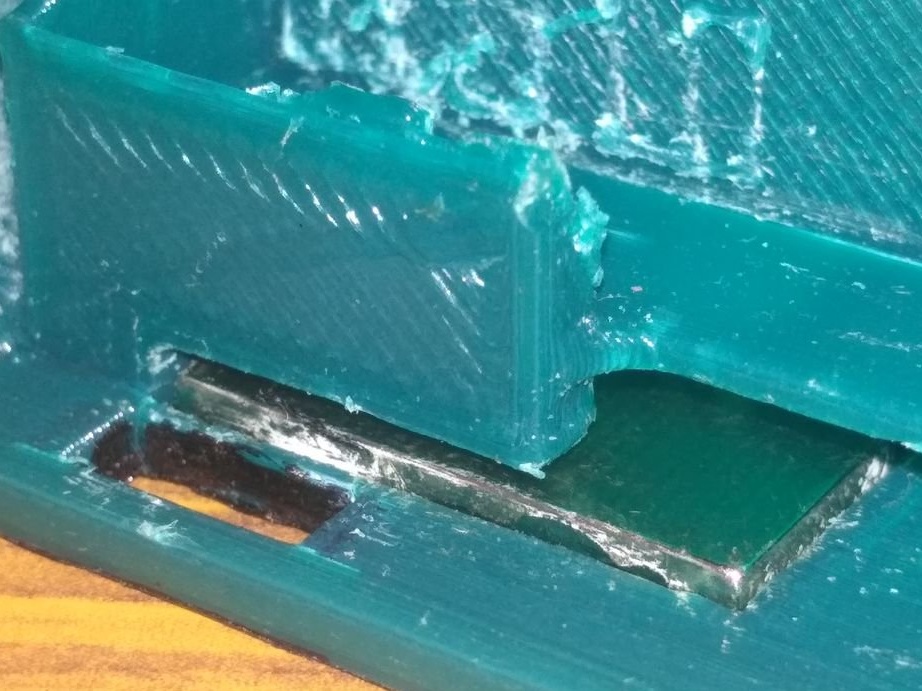
Etapa três: Ímã
Cola o ímã no corpo.

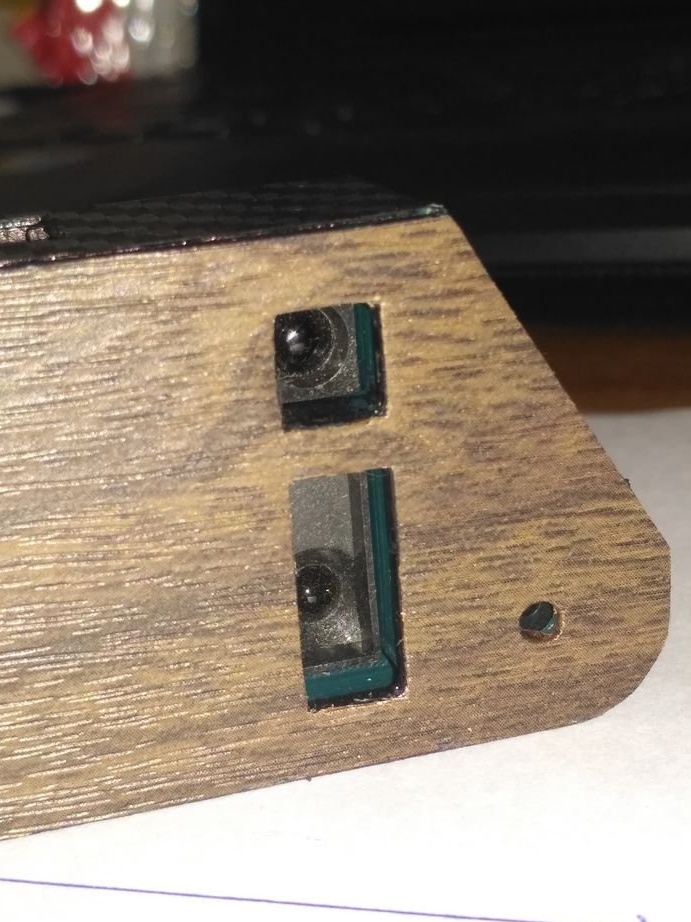
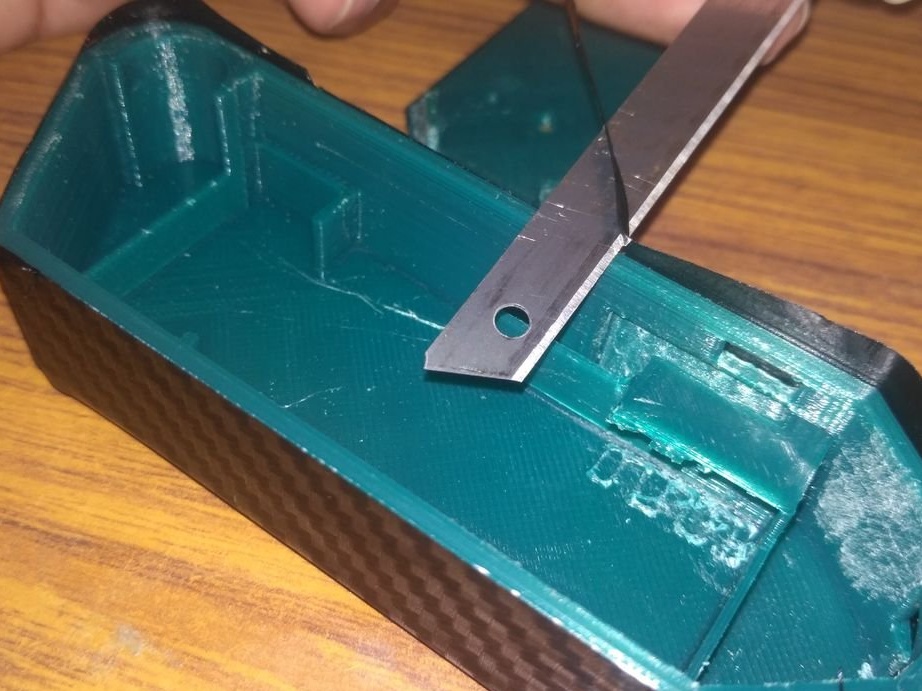
Etapa 4: Alinhamento do sensor
Para reduzir o tamanho, o sensor IR e o codificador são cortados.






Etapa cinco: exibição
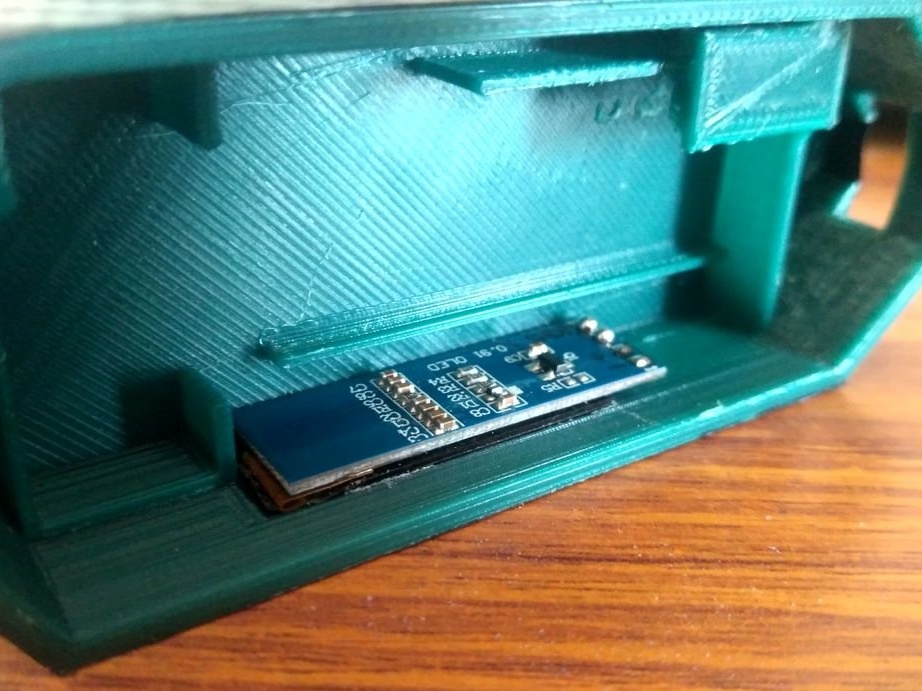
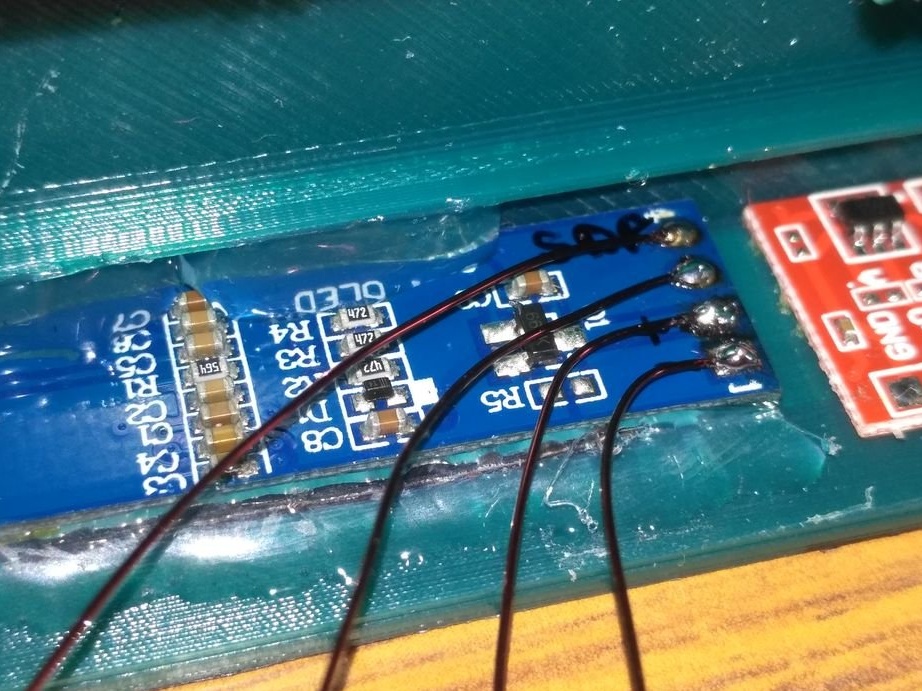
Marca os nomes dos contatos na parte traseira da tela OLED para que você possa fazer as conexões corretas posteriormente. Define a tela OLED para a posição correta, conforme mostrado na segunda figura. Corrige a tela com cola quente.

Etapa 6: Módulos
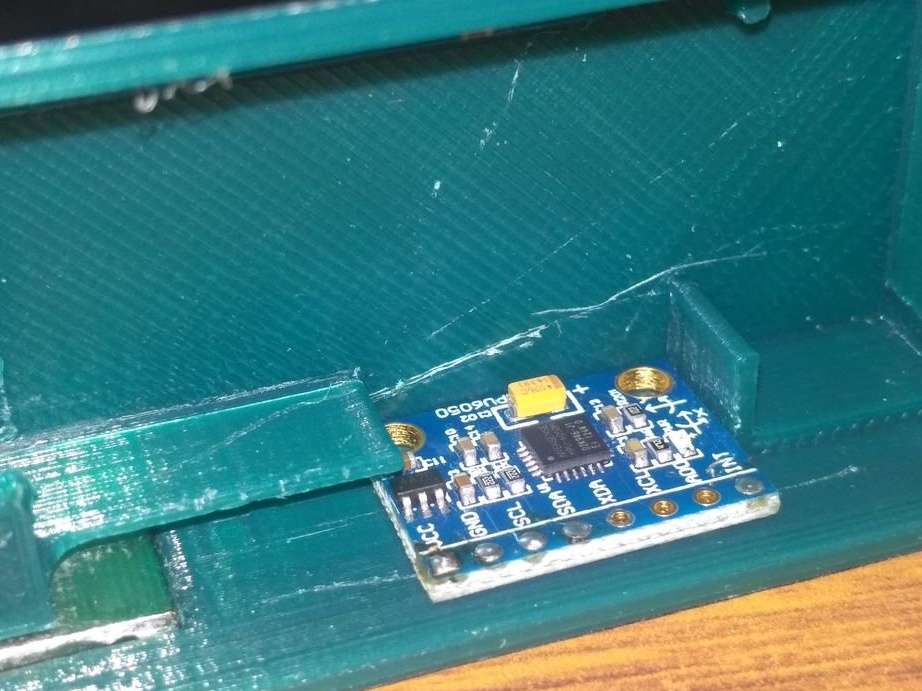
Cola o módulo do sensor e o MPU6050.

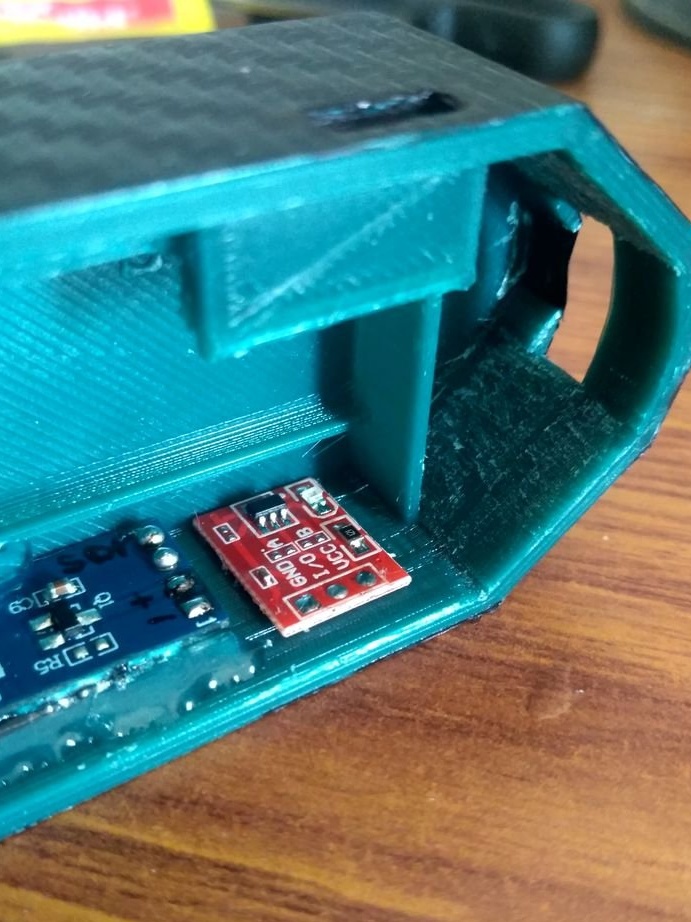

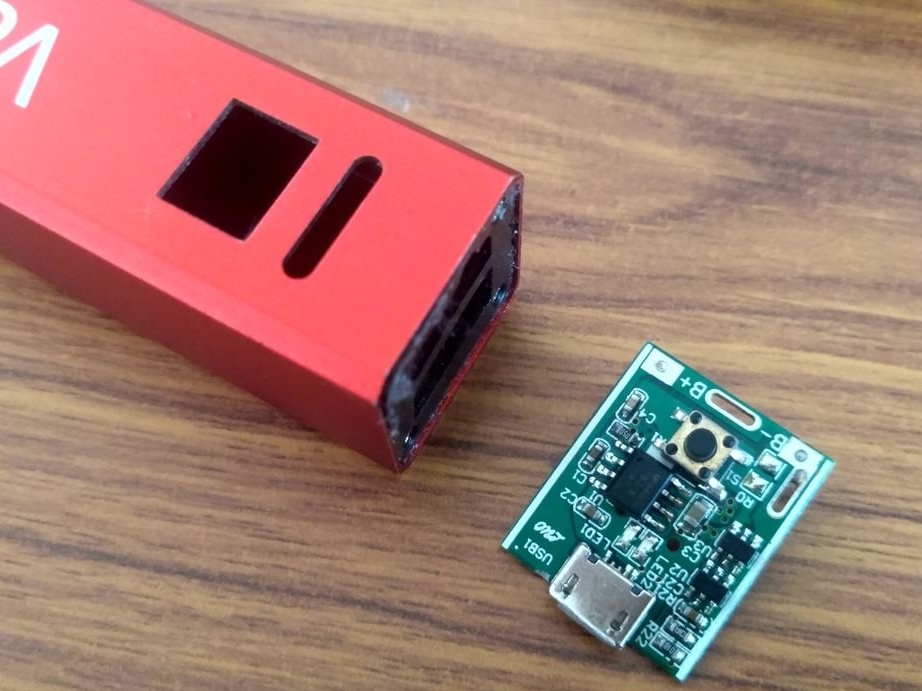
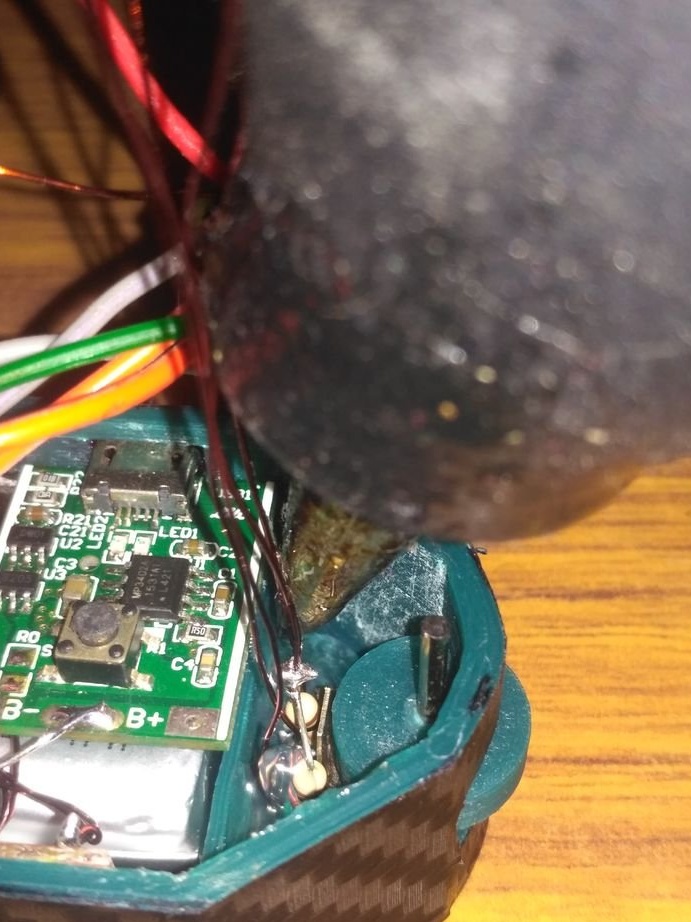
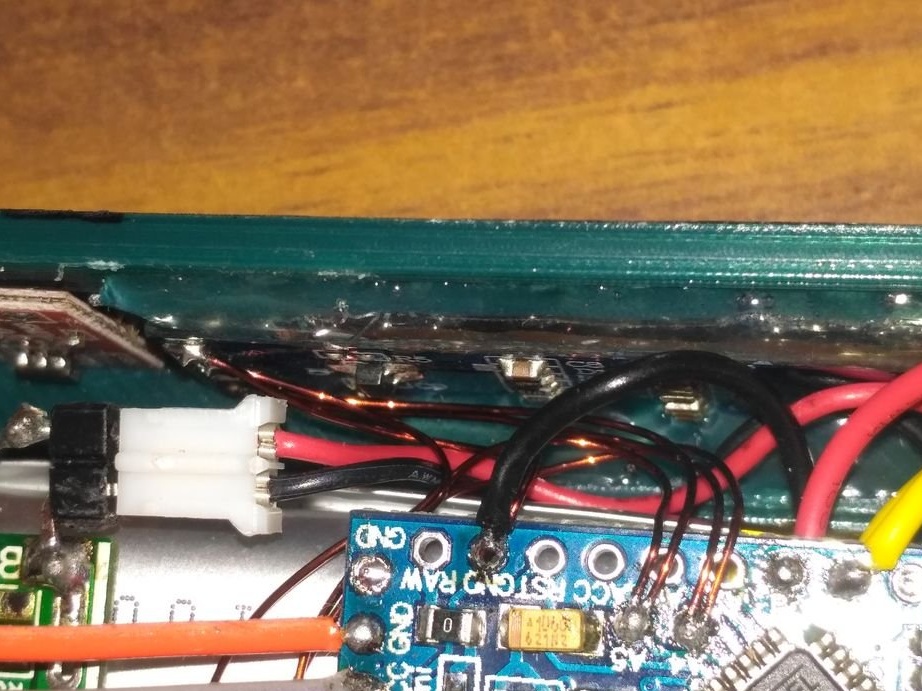
Sétimo passo: módulo de carregamento e bateria
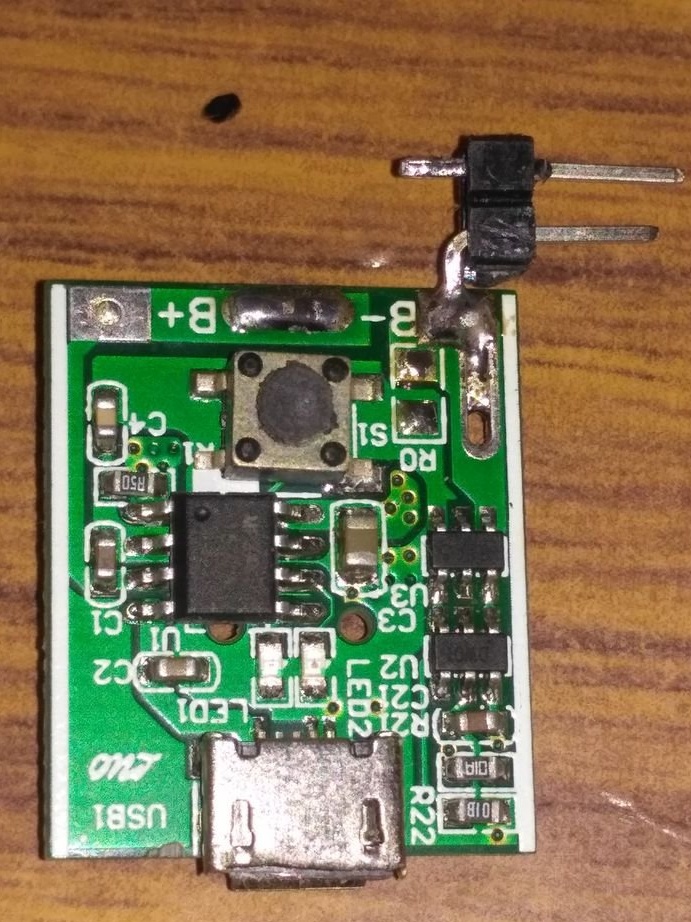
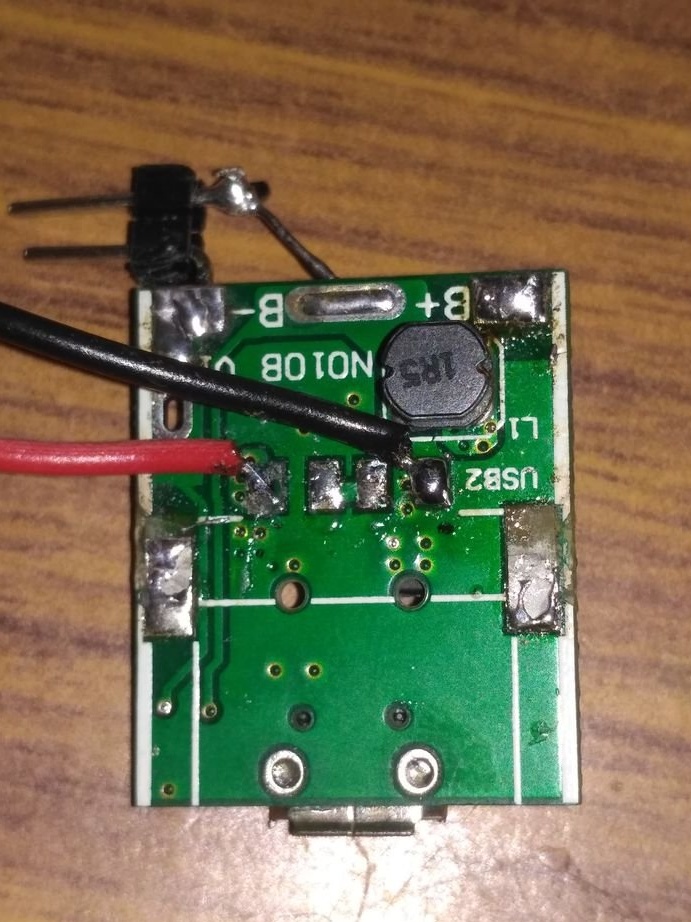
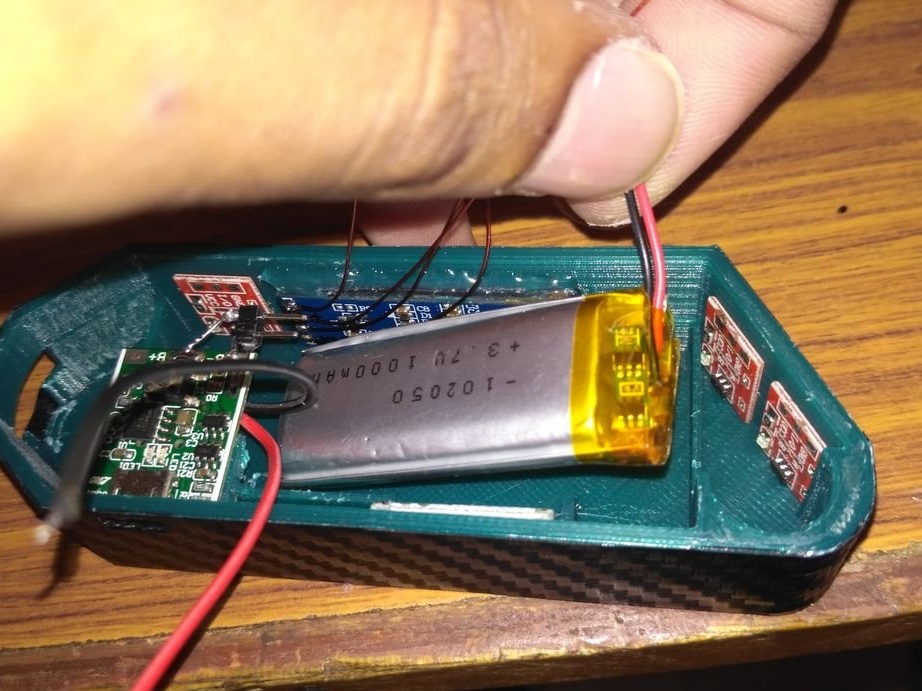
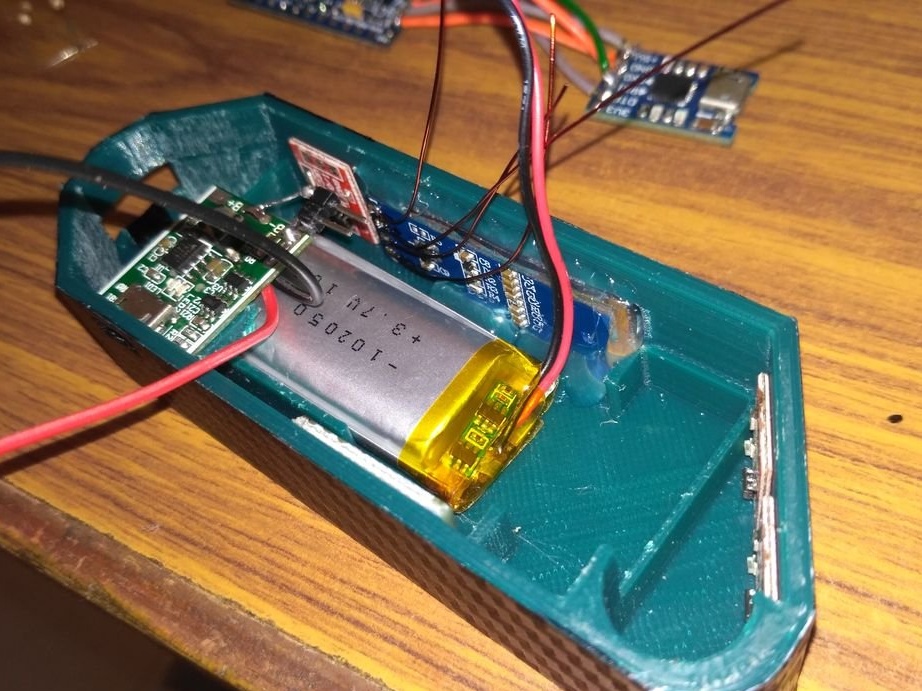
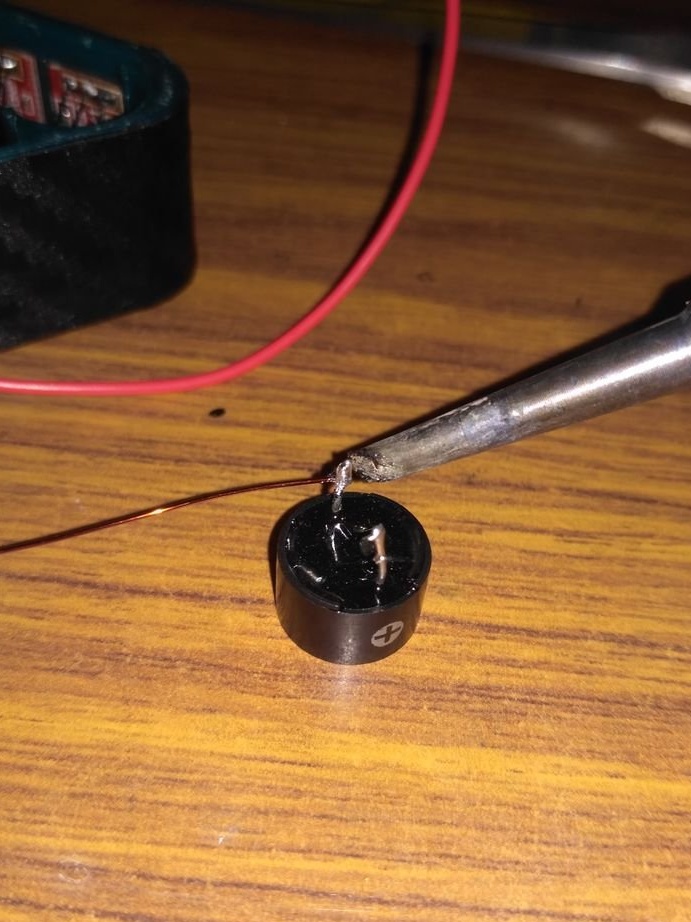
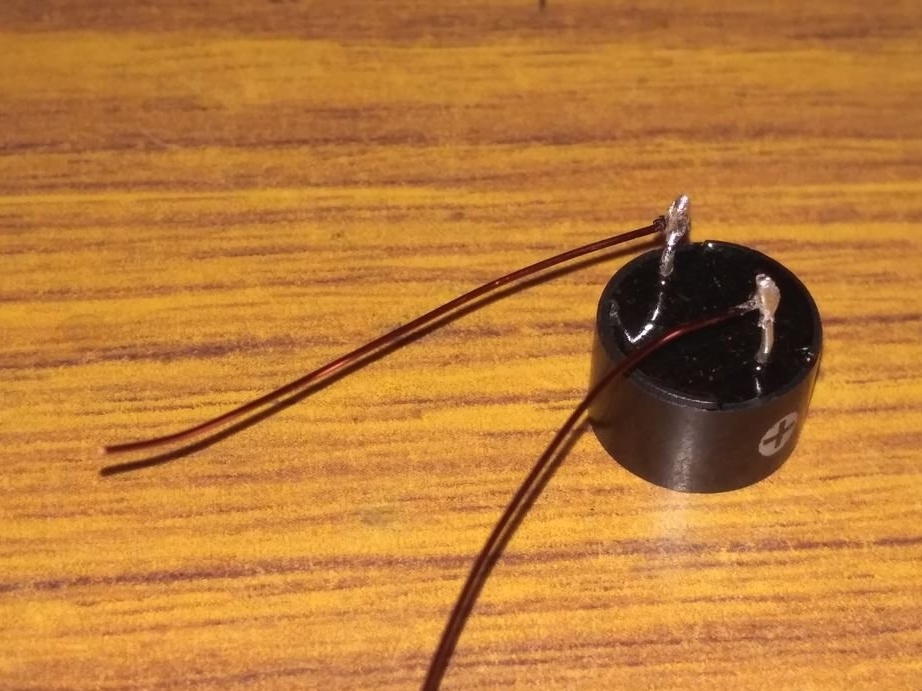
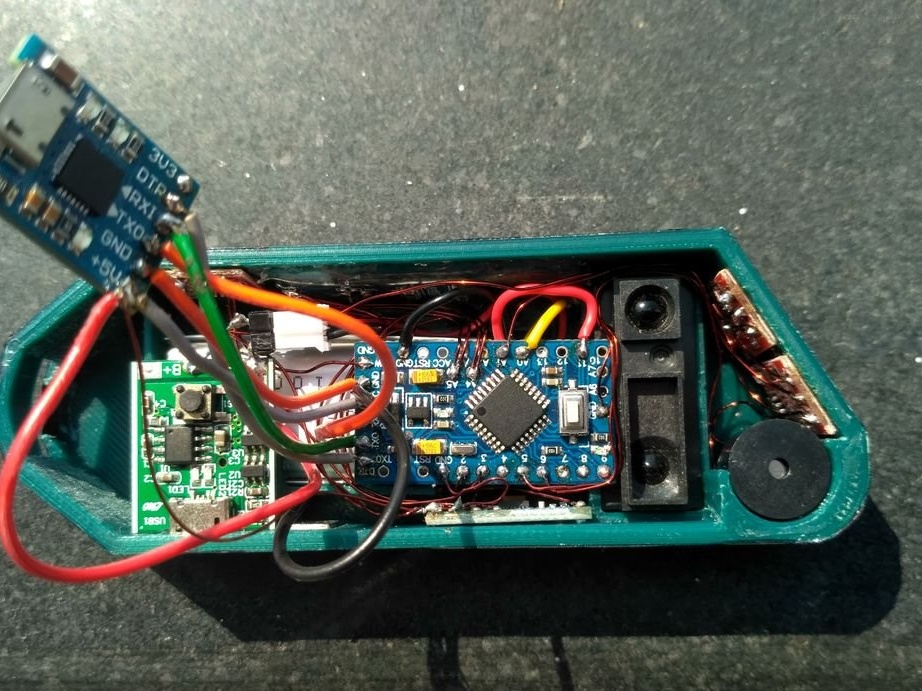
Este módulo possui um circuito de proteção de bateria e um conversor auxiliar de 5 V, 1 A. Ele também possui um botão liga / desliga que pode ser usado como um interruptor de energia. A porta do soquete USB no módulo foi removida usando um ferro de solda e os dois fios foram soldados nos terminais + 5 V e no terra, conforme mostrado na quarta foto.
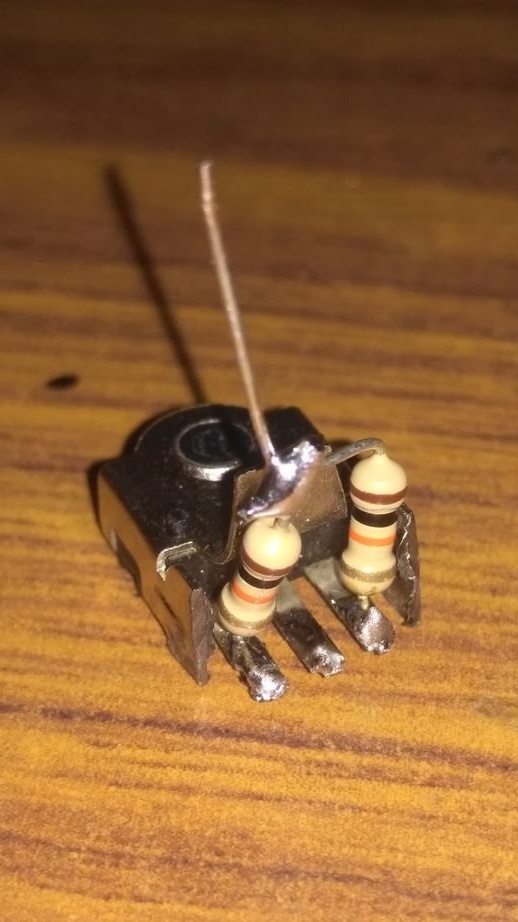
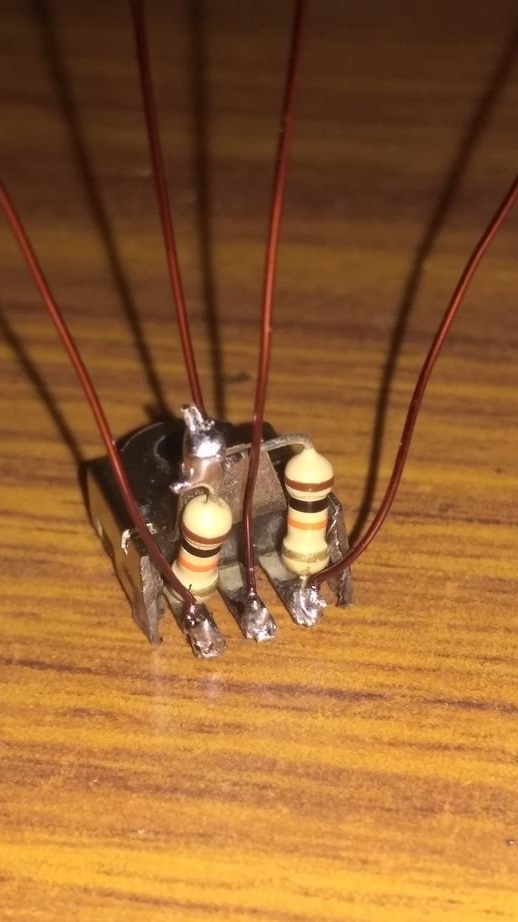
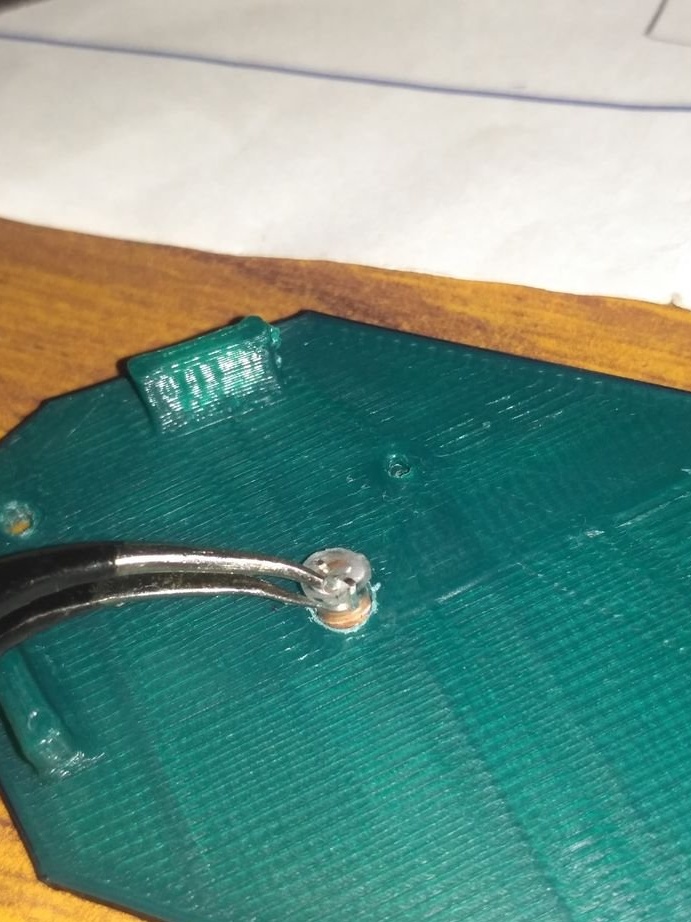
Em seguida, você precisa soldar os 2 conectores de ficha em B + e B-, conforme mostrado nas duas primeiras fotos, e depois verificar se o módulo funciona com a bateria.
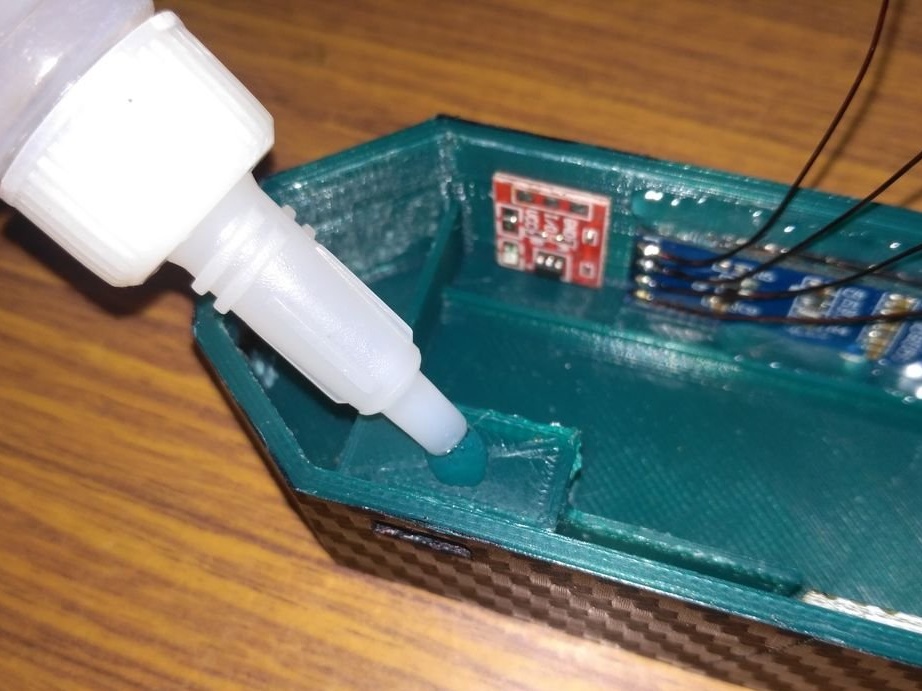
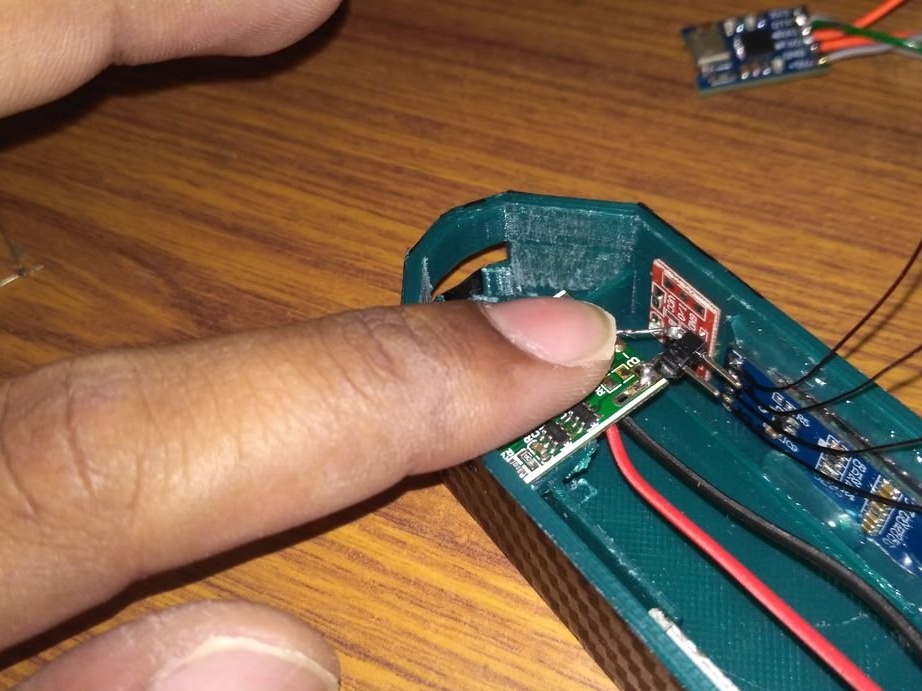
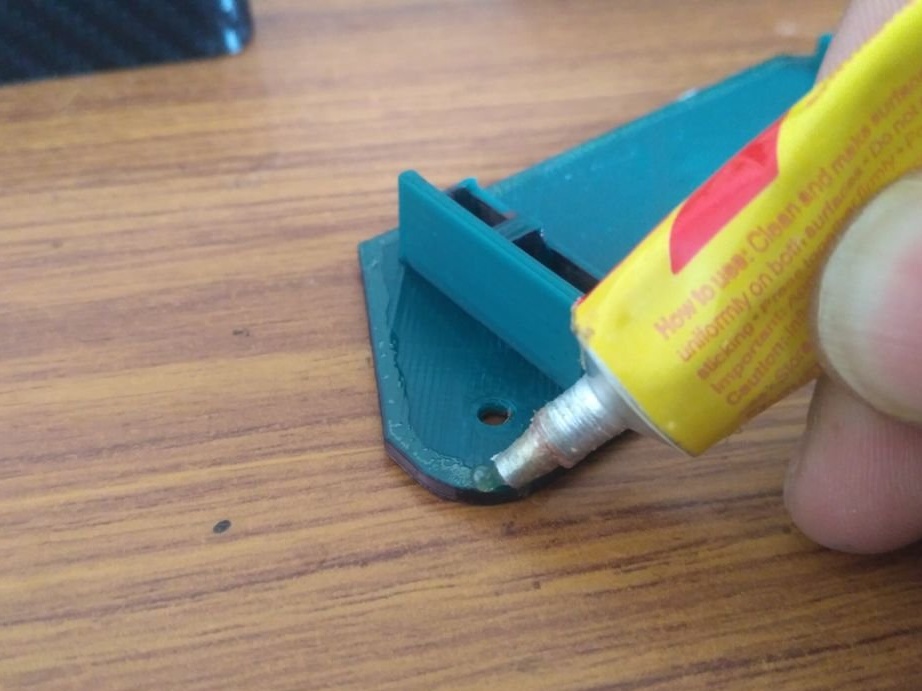
Agora você precisa aplicar cola na plataforma fornecida para o módulo e coloque o módulo com cuidado, certificando-se de que a porta e o orifício de carregamento estejam instalados exatamente nos orifícios.

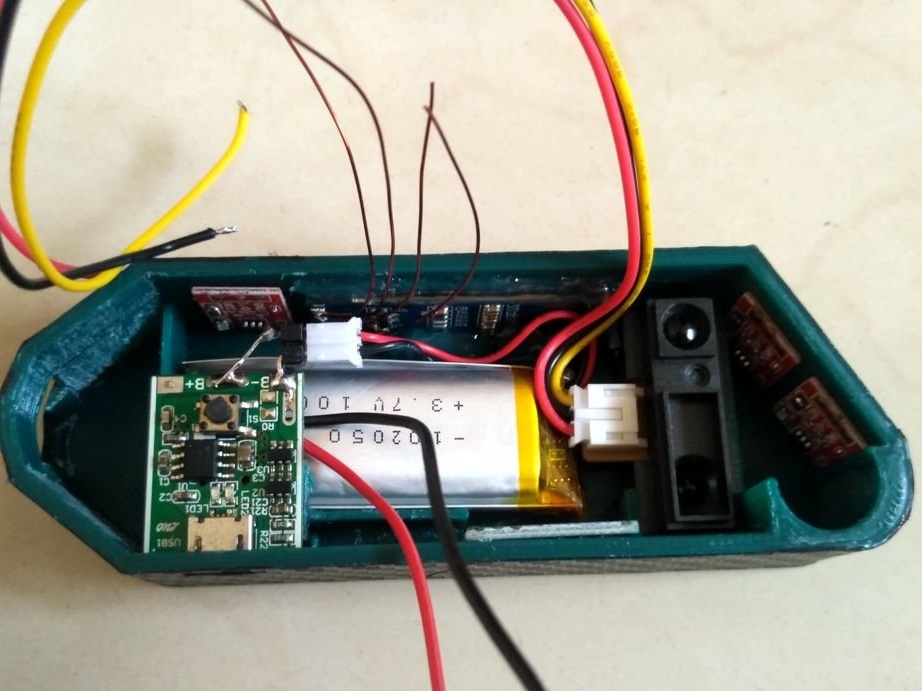
Etapa Oito: Instalando a Bateria e o Sensor IR
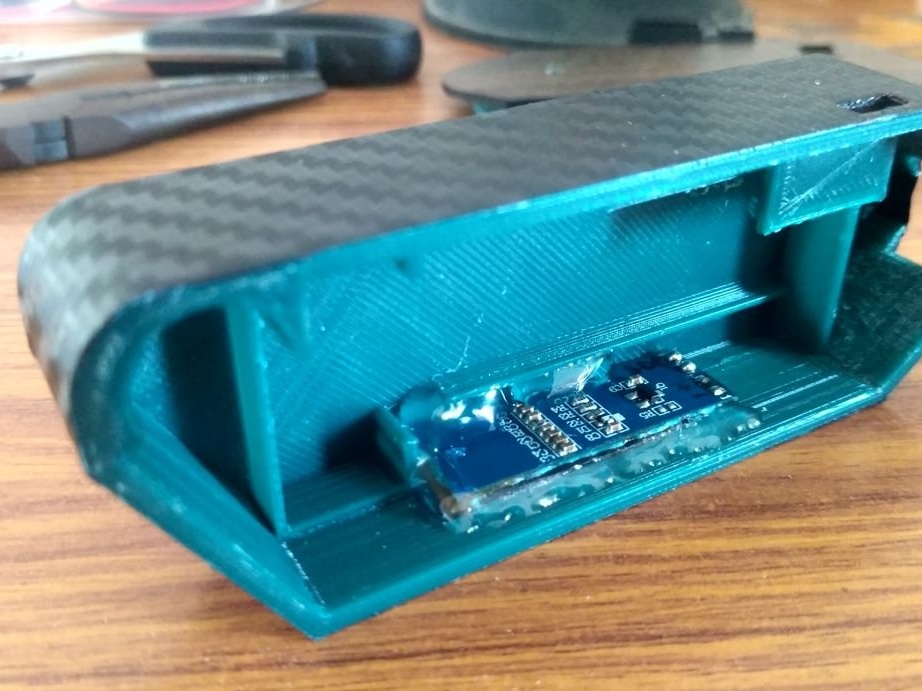
Arames de solda aos pinos da tela. Instala a bateria e o sensor IR.

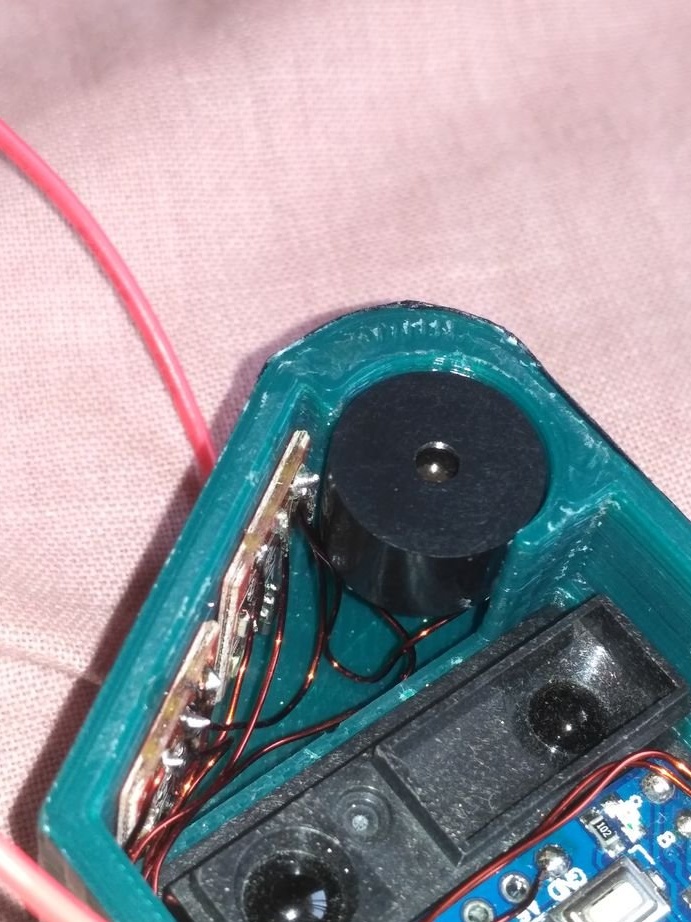
Etapa nove: campainha e módulo de carregamento
De acordo com o esquema, ele monta o módulo de carregamento e a campainha.

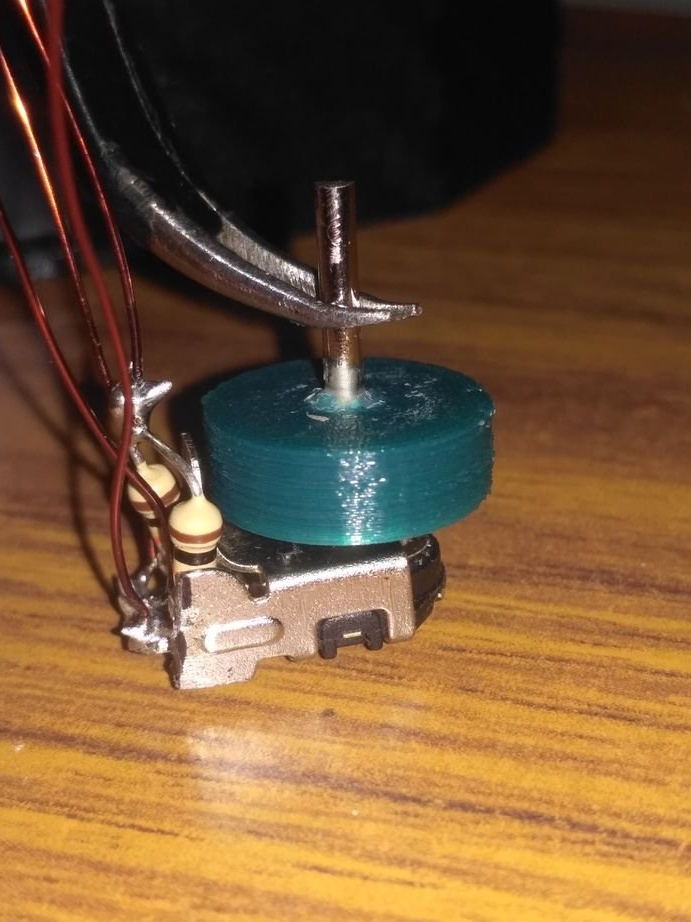
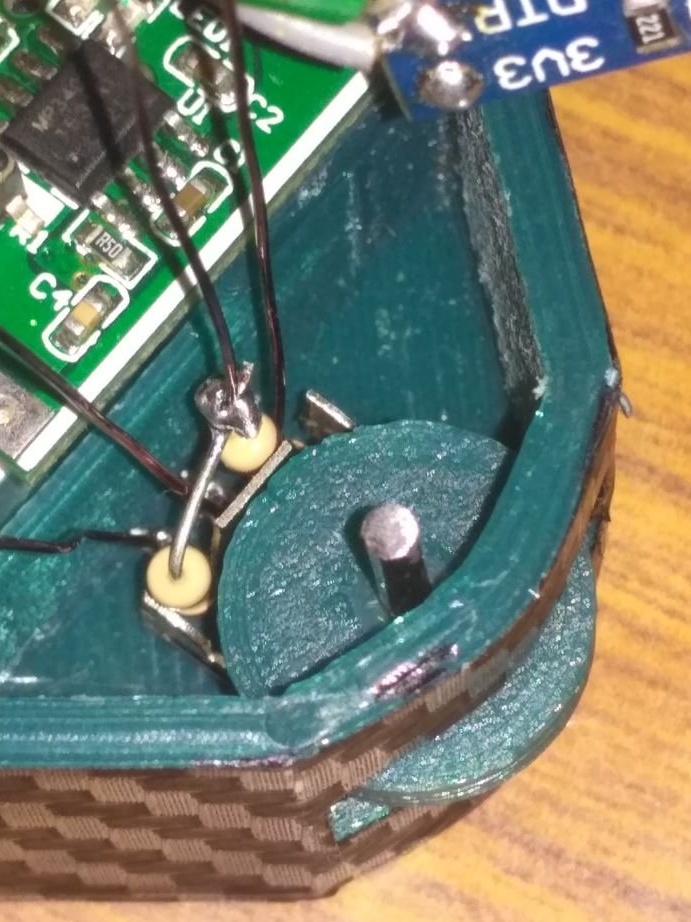
Etapa 10: Codificador
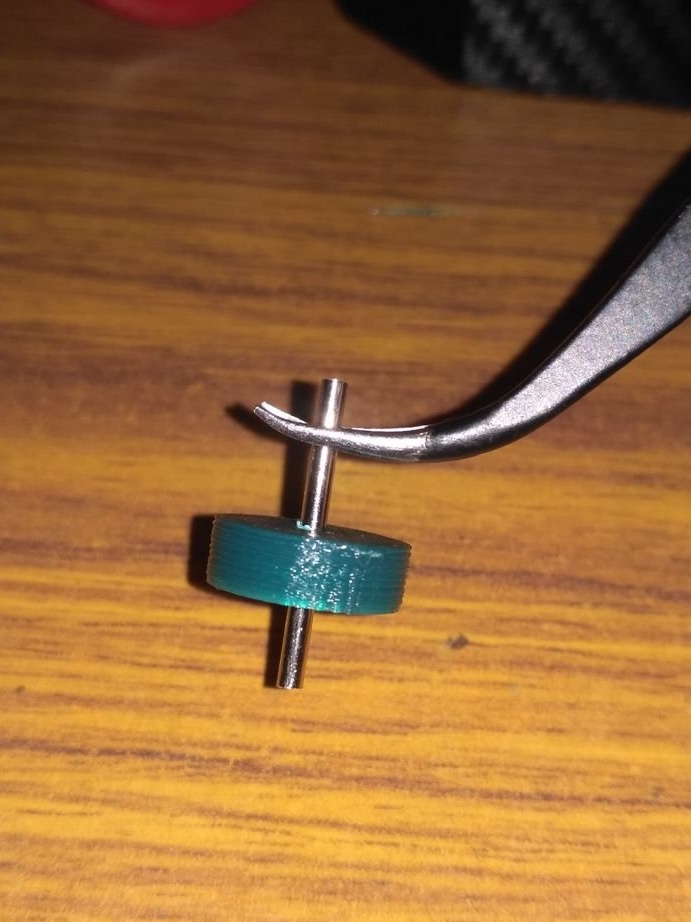
De acordo com o esquema monta o codificador. Insere o eixo de aço no codificador e na roda. Ele usa super cola para fixar o eixo e a roda. Instala um codificador com uma roda dentro da caixa.




Etapa 11: Instalação
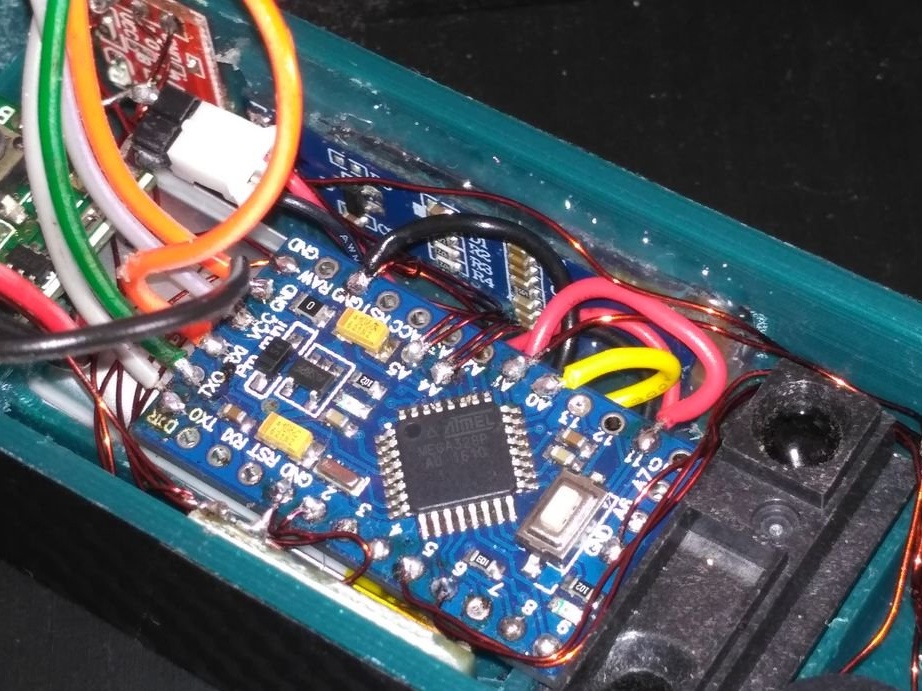
Corrige os módulos do sensor. De acordo com o circuito monta os fios. Durante a instalação, é necessário garantir que os fios não caiam sob a roda e não cubram a visão geral do sensor de infravermelho.


Etapa Doze: Download do Código
Carrega código e bibliotecas.
final_code.ino
Adafruit_SSD1306-master.zip
Adafruit-GFX-Library-master.zip
SharpIR-master.zip

Etapa Treze: Calibração
Primeiro, o giroscópio é calibrado. Como o módulo acelerômetro / giroscópio MPU6050 é simplesmente colado ao corpo, ele pode não estar completamente plano. Portanto, para corrigir esse erro, as seguintes etapas são executadas.
1. Conecte o dispositivo ao computador e coloque-o em uma superfície plana.
2. Alterne para o modo LEVEL no dispositivo tocando no botão “M” e anote os valores X e Y.
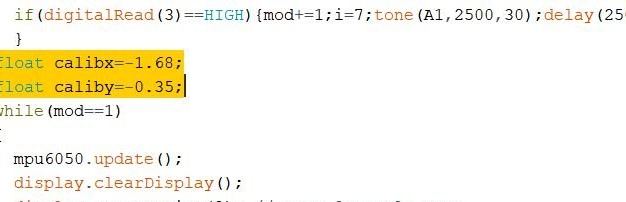
3: atribua esses valores às variáveis “calibx” e “caliby” no código.
4: Baixe o programa novamente.



Agora calcula as distâncias por rotação da roda.
O número de etapas por rotação do eixo do codificador, N = 24 etapas
Diâmetro da roda, D = 12,7 mm
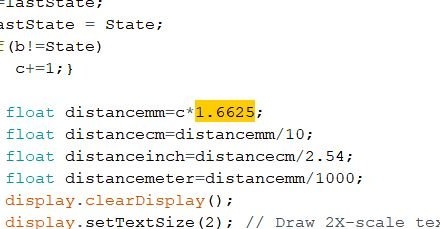
Circunferência da roda, C = 2 * pi * (D / 2) = 2 * 3,14 * 6,35 = 39,898 mm
Portanto, a distância percorrida por etapa = C / N = 39.898 / 24 = 1,6625 mm.
Etapa Quatorze: Teste
Antes de instalar a tampa da caixa, ele testa sensores, módulo de carga, botões e visor.



Etapa quinze: montagem de botões e caixas
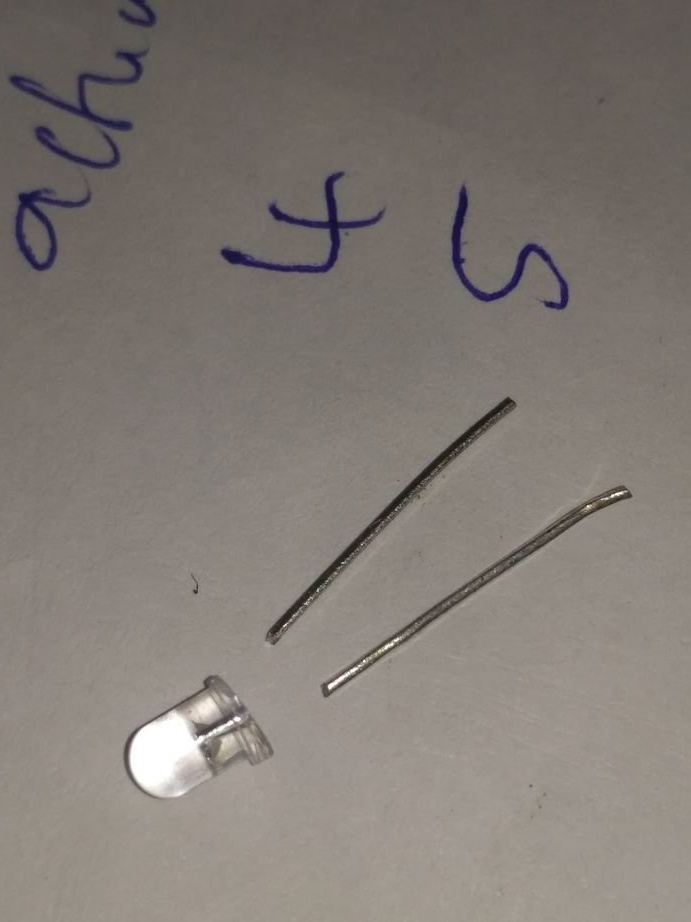
O botão liga / desliga na placa de carregamento é curto e o mestre, cortando as pernas, define um LED adicional, que pressionará o botão.



Cola duas metades do corpo.





Etapa dezesseis: marcando os botões
As letras foram cortadas em um cortador a laser e coladas no corpo.




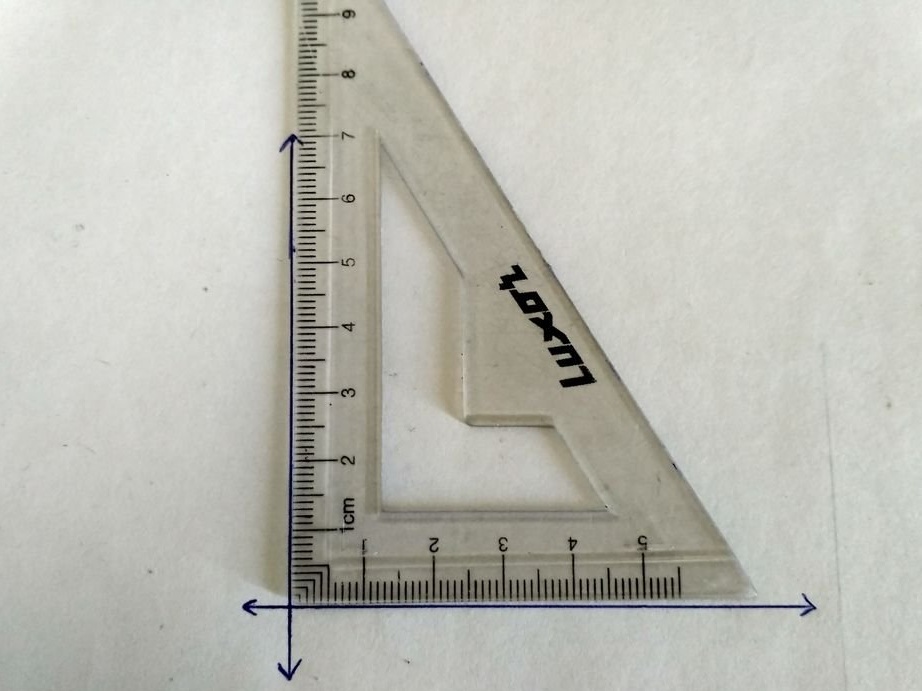
Tudo está pronto, resta apenas testar o dispositivo em operação.