


Neste artigo, o Assistente nos dirá como ele criou um barman robótico controlado por um smartphone.
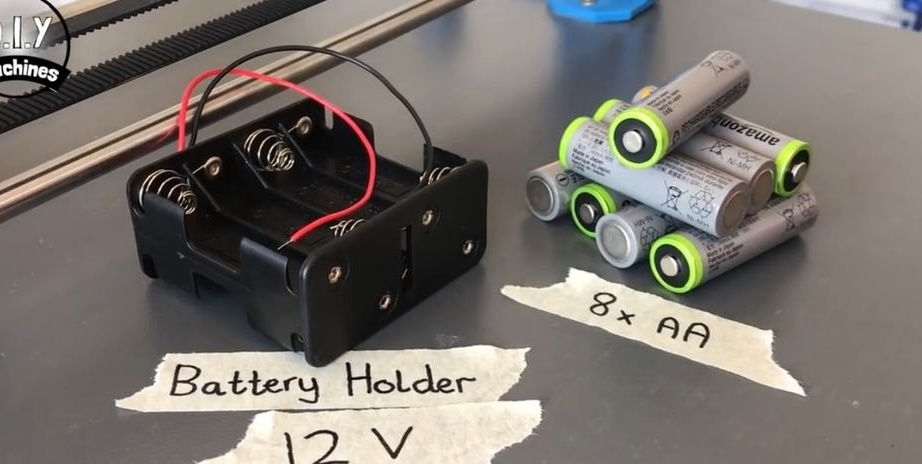
Características do dispositivo: trabalhe com Arduino, preço acessível, controle bluetooth de qualquer dispositivo, autonomia (trabalhe com 8 pilhas AA).
Para criar esse dispositivo, o mestre usou o seguinte
Materiais e ferramentas:
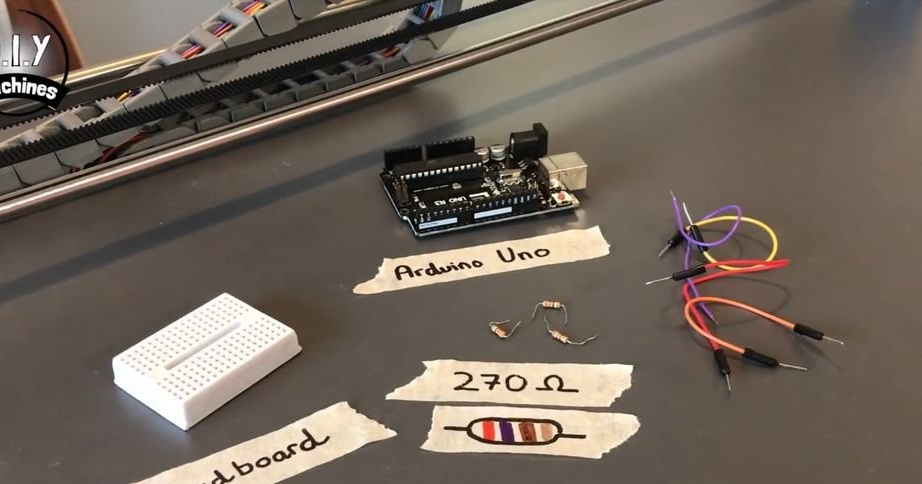
-Arduino Uno;
Motor de acionamento L293D;
- interruptor de contato;
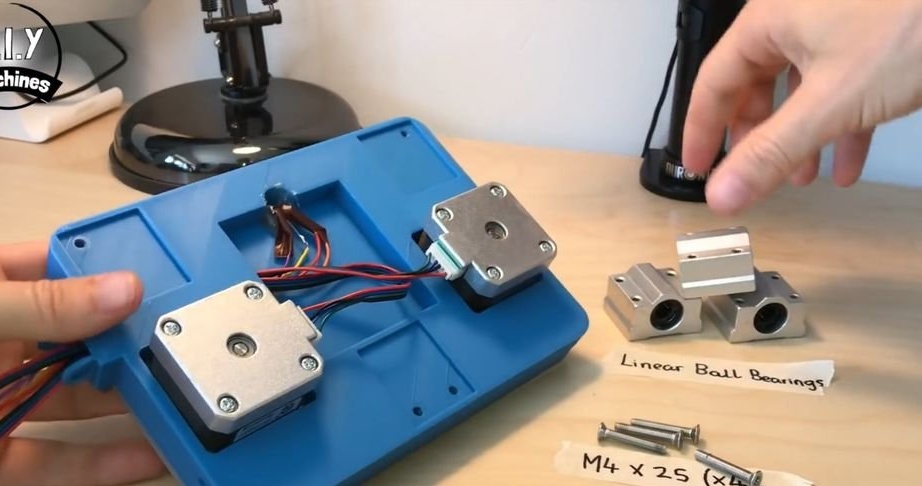
Rolamentos lineares;
Motor -Step;
- Cinto e polia (versão 2m);
- Cinto e polia (versão 5m);
Módulo Bluetooth -HM10;
-A chave de fenda;
-Fixadores;
Pernas;
-Tabela superior;
Impressora 3D;
Hastes de metal;
- chave de fenda;
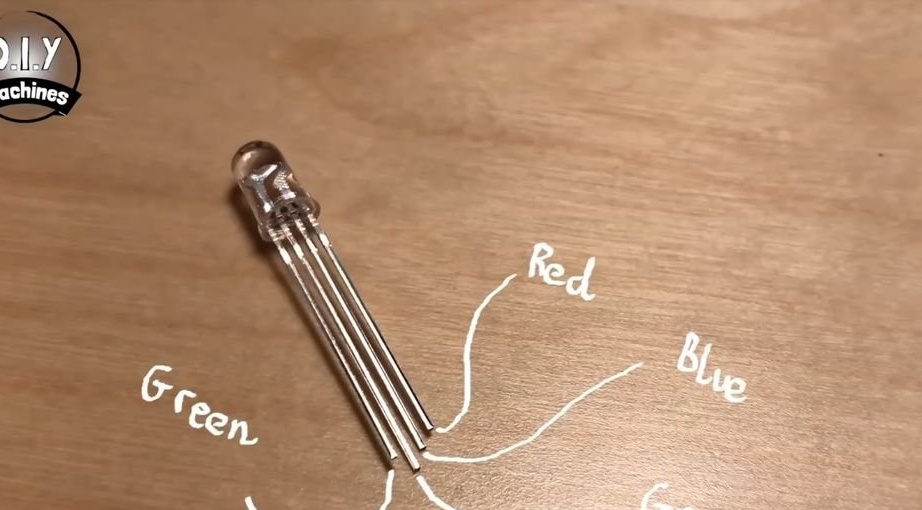
- LED RGB;
Fio;
Acessórios de solda;
-Izolenta;
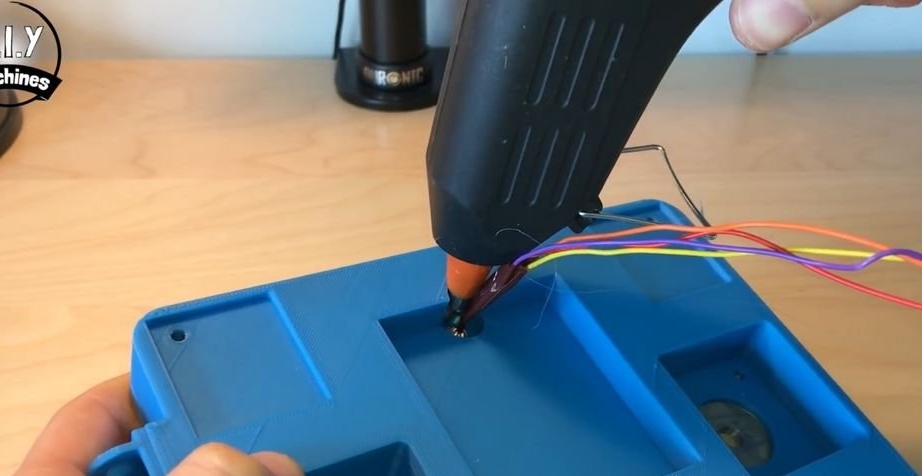
-Pistola de cola;
-Compartimento da bateria;
-Conectores;
-Baterias;
-Computador com software;
- Suportes para garrafas;
Válvula
-Garrafas;
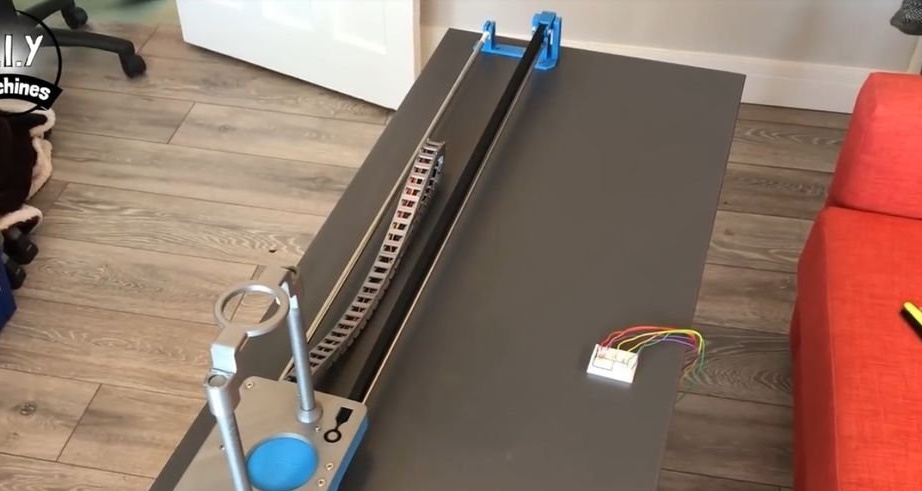
Etapa um: a mesa
Primeiro, o mestre coleta a tabela. Tamanho da mesa 120 * 45 cm, espessura da mesa 18 mm.


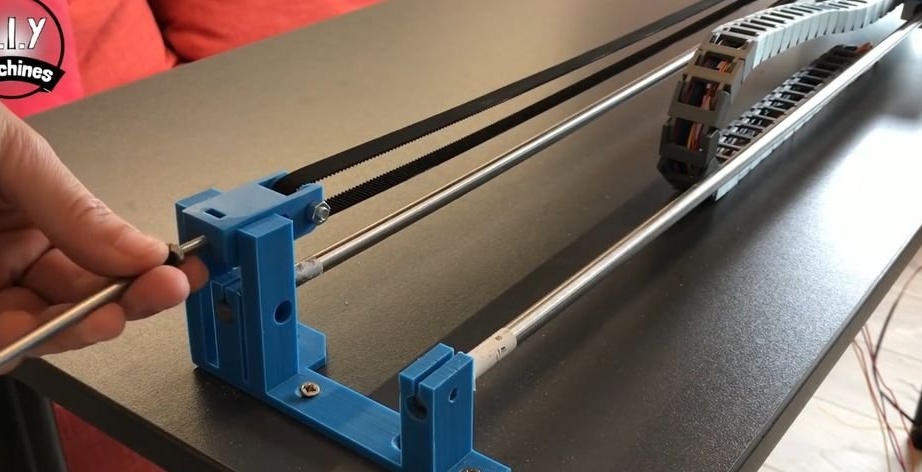
Etapa 2: Tensor
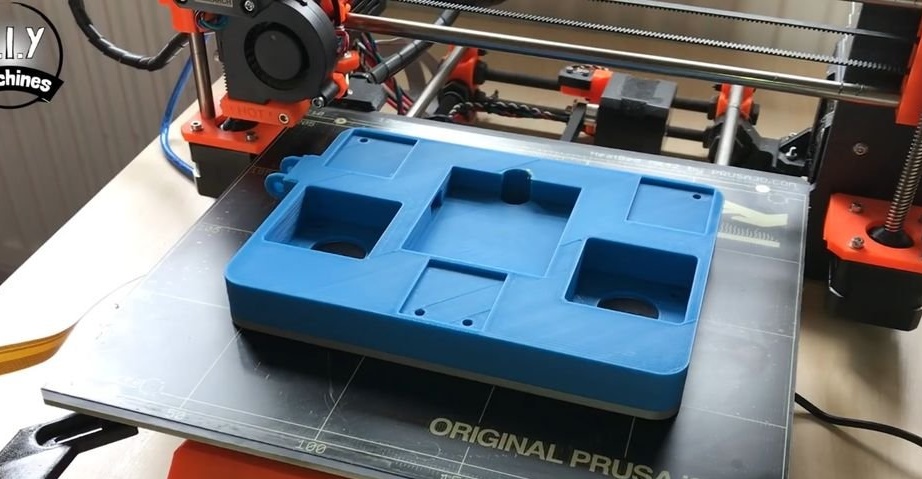
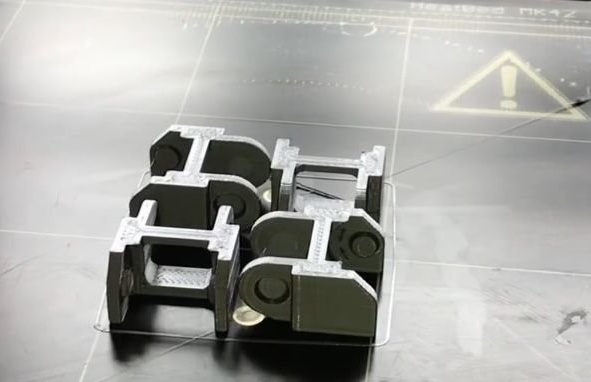
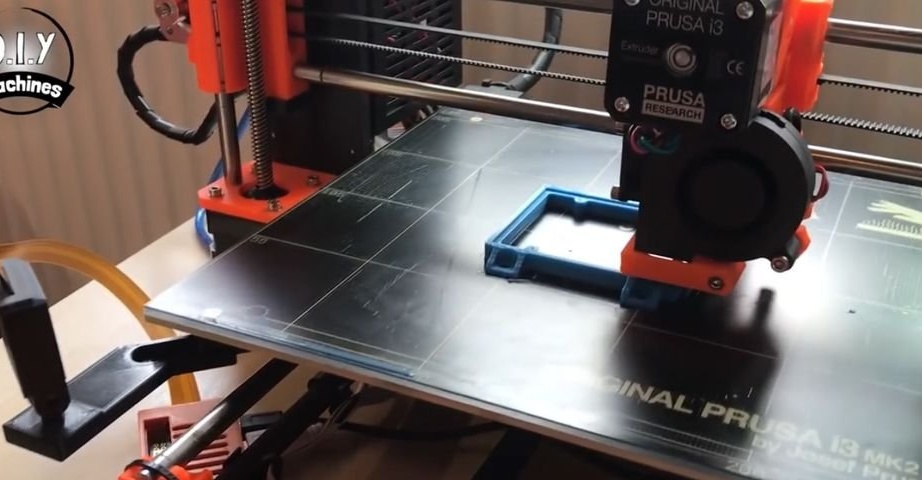
Os arquivos para impressão de peças podem ser baixados abaixo.
Arquivos de impressão 3D.
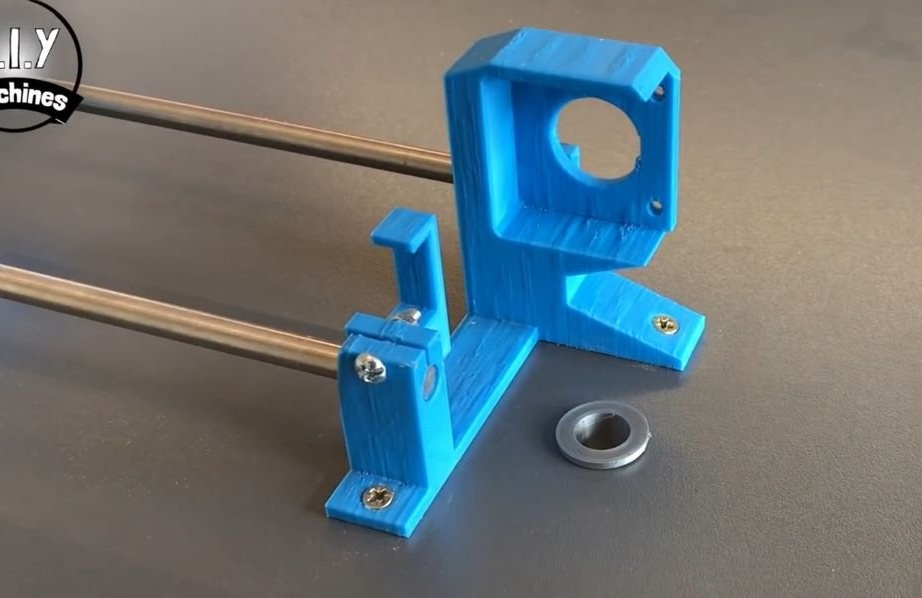
Agora será necessário imprimir os dois primeiros detalhes “idler.stl” e “Rod_Clamp_V5.stl”.
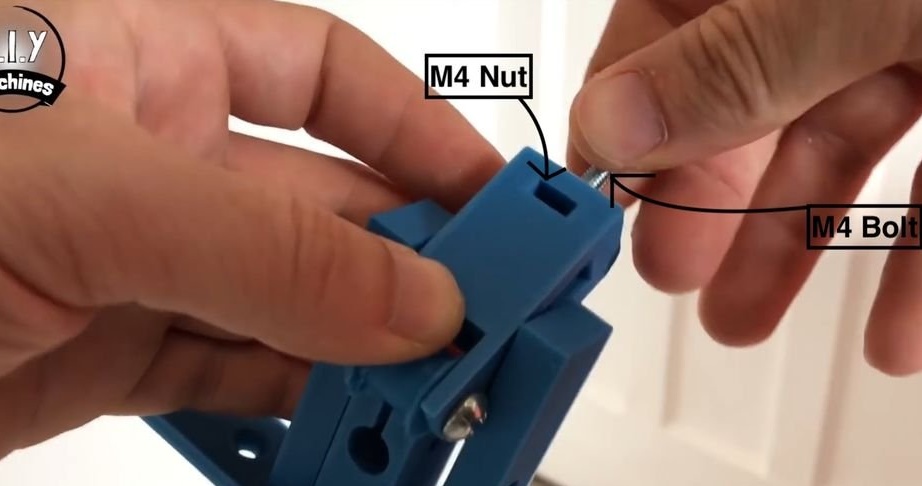
Após a impressão, é necessário conectar o rolo tensor ao grampo da haste usando um parafuso e porca M4 longos. Uma fixação forte não é necessária, pois o rolo deve girar livremente.
Então as duas partes são unidas.
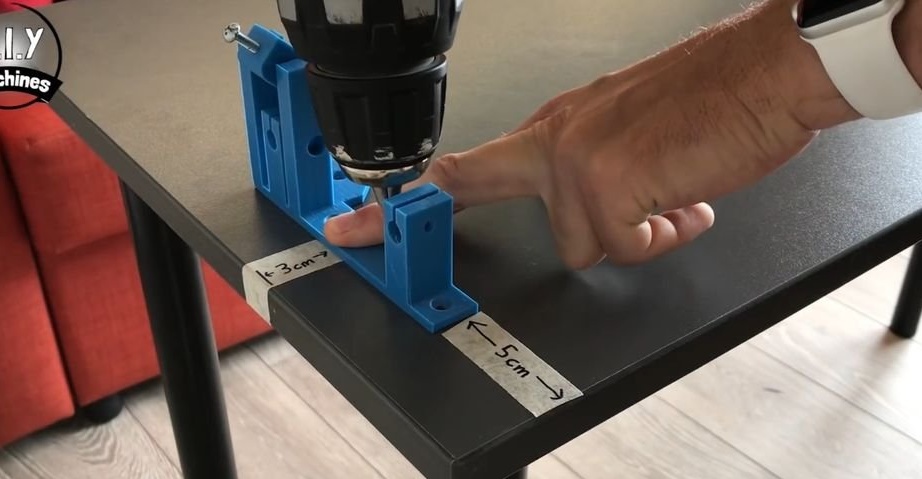
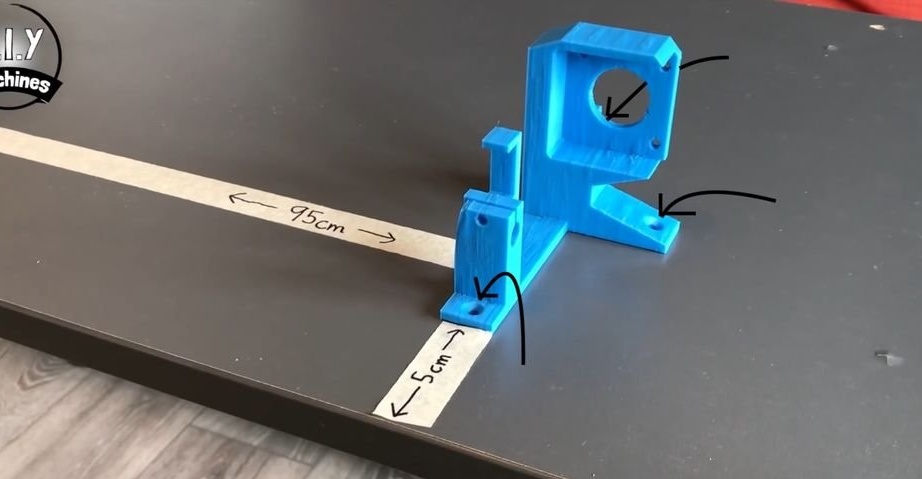
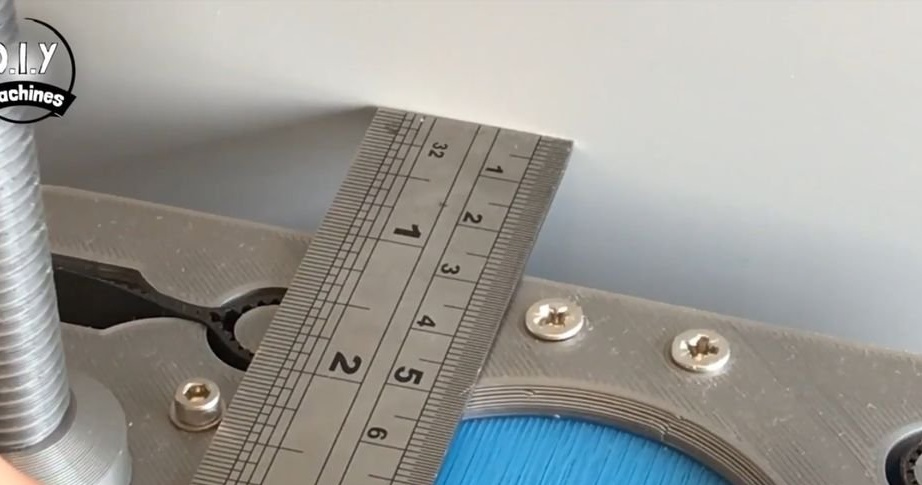
Marca em uma mesa a 3 cm da extremidade curta esquerda e a 5 cm da borda frontal e aperta o tensionador.

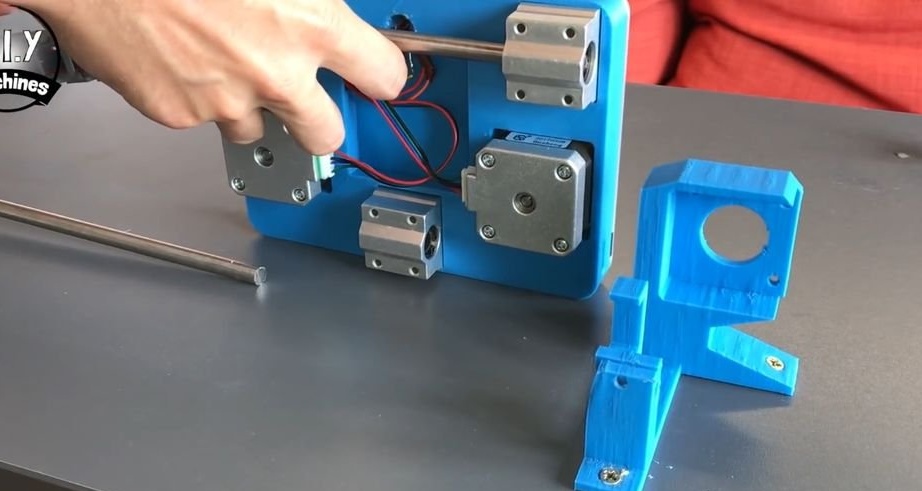
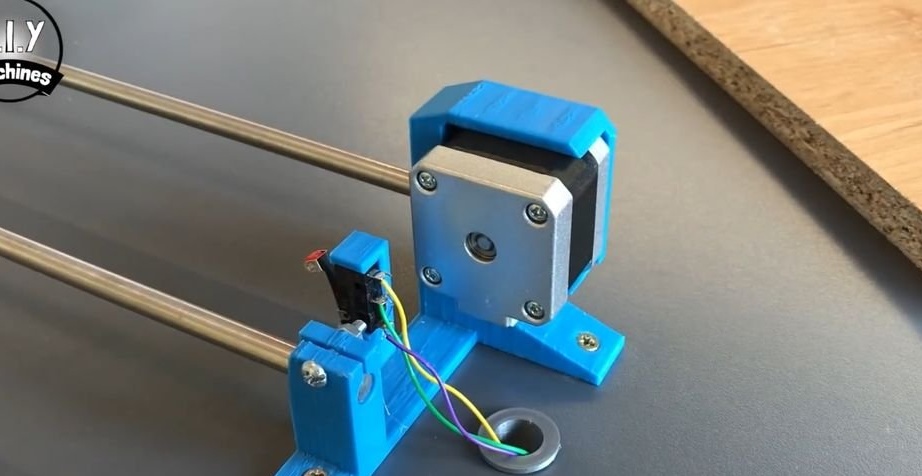
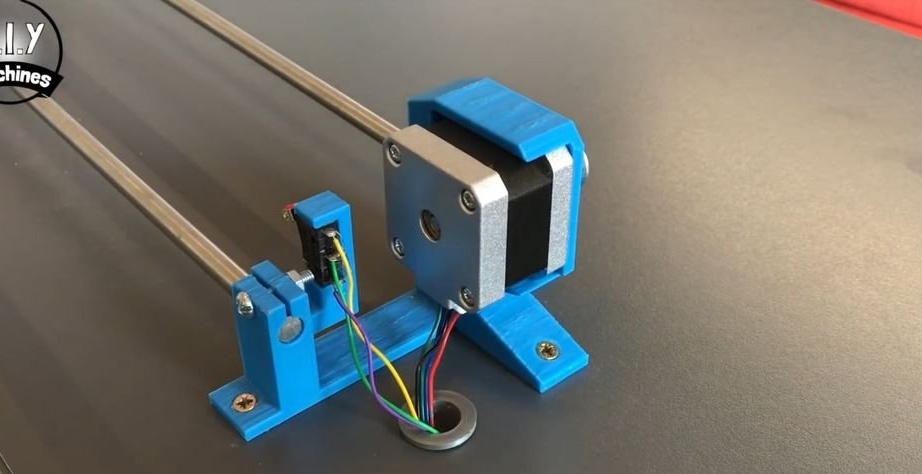
Etapa 2: Montagem do motor
Imprime a montagem do mecanismo, arquivo "X_Axis_Motor_Mount.stl". Prende na mesa a uma distância de 95 cm do tensor e 5 cm da borda da mesa.
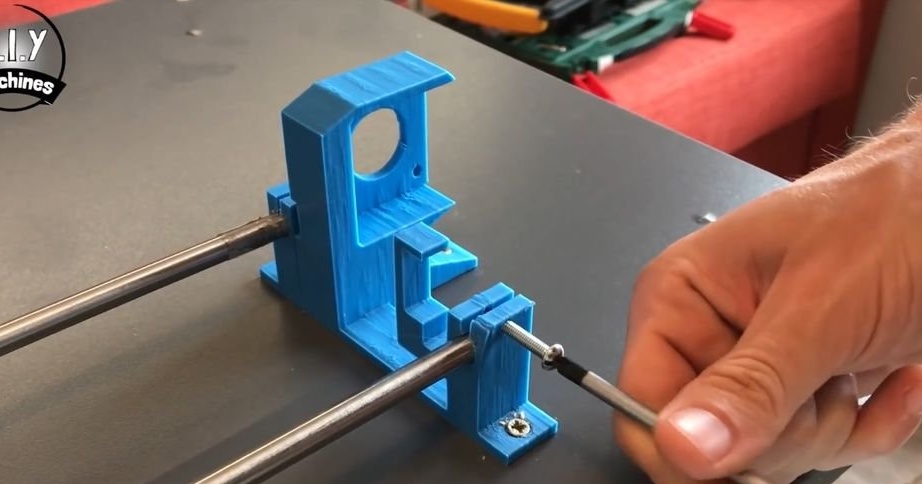
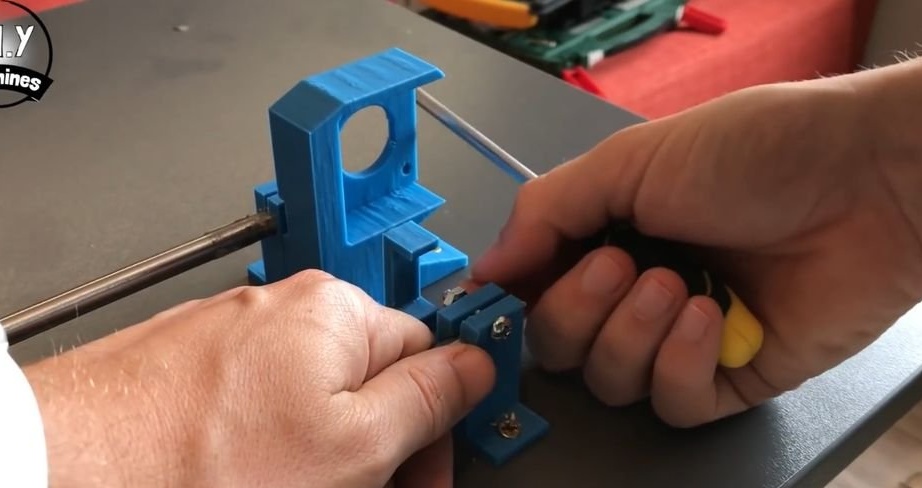
Etapa três: Guias
Define guias. O comprimento das hastes é de 1 metro.
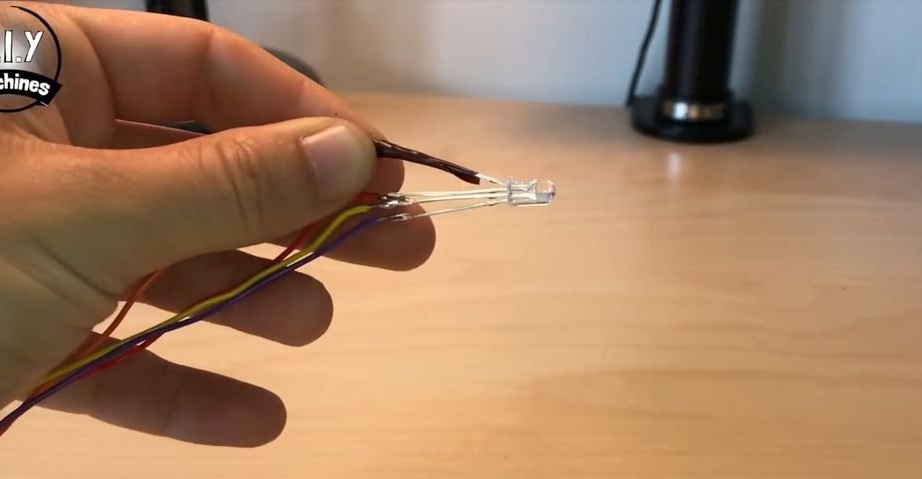
Etapa quatro: LED
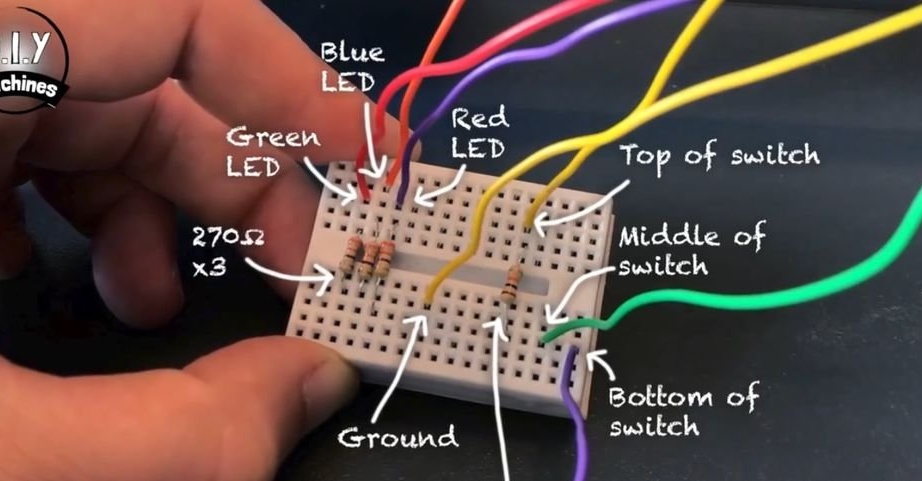
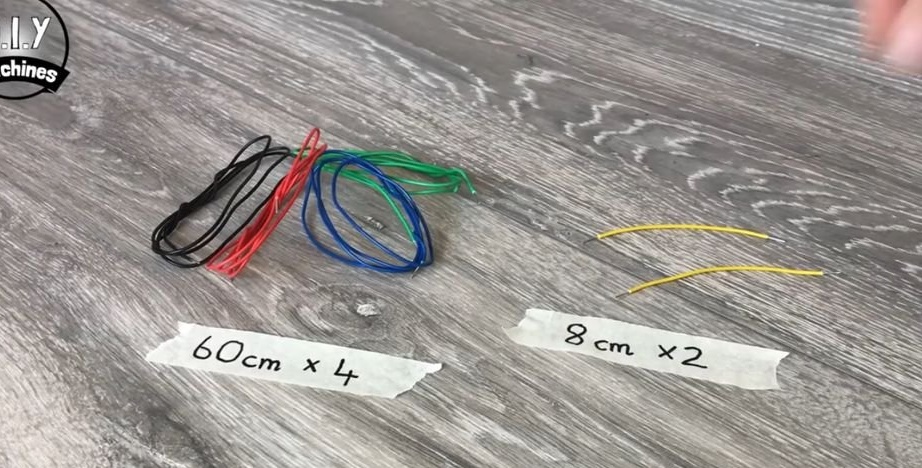
O mestre usará o LED RGB para indicação. Solde fios de 180 cm de cores diferentes para cada perna. A junção isola.




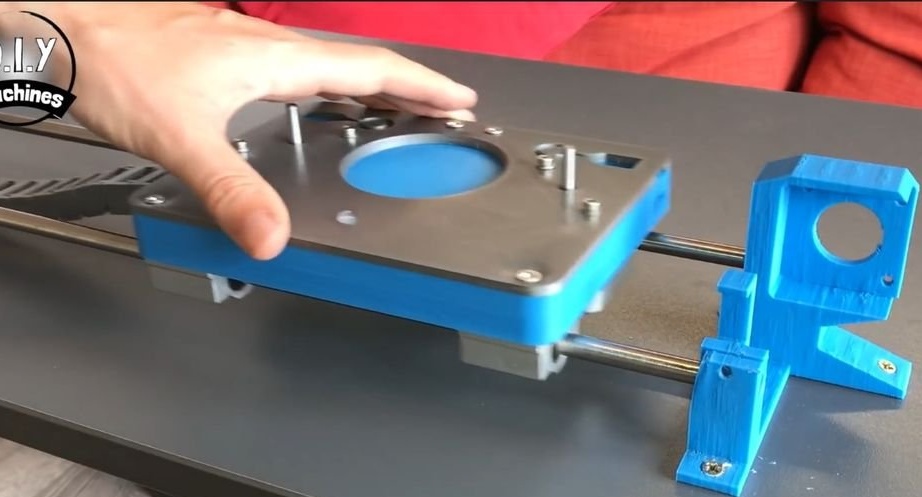
Etapa cinco: plataforma
Imprime a peça 'slider_base_v3.stl'. Corrige um LED. Instala motores de passo.
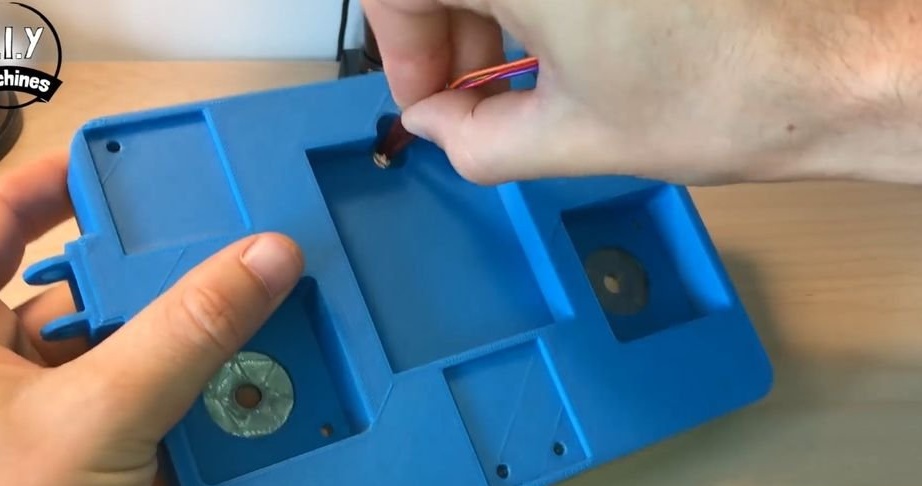

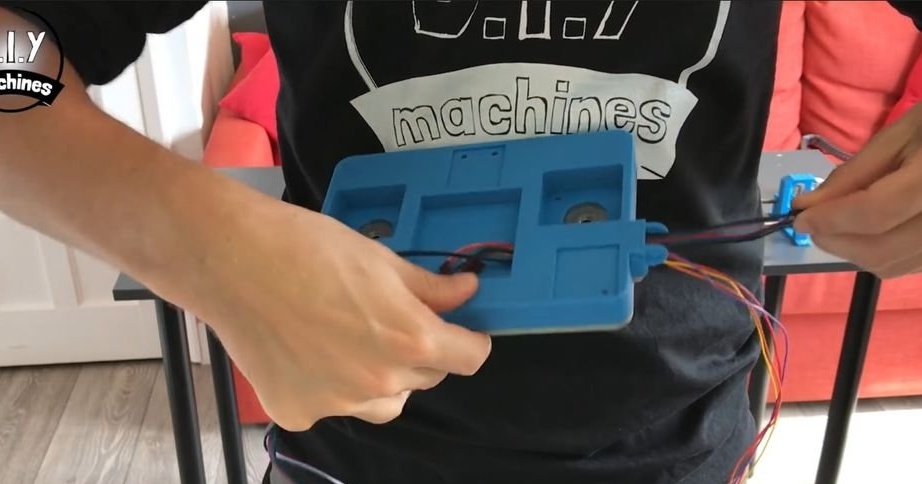
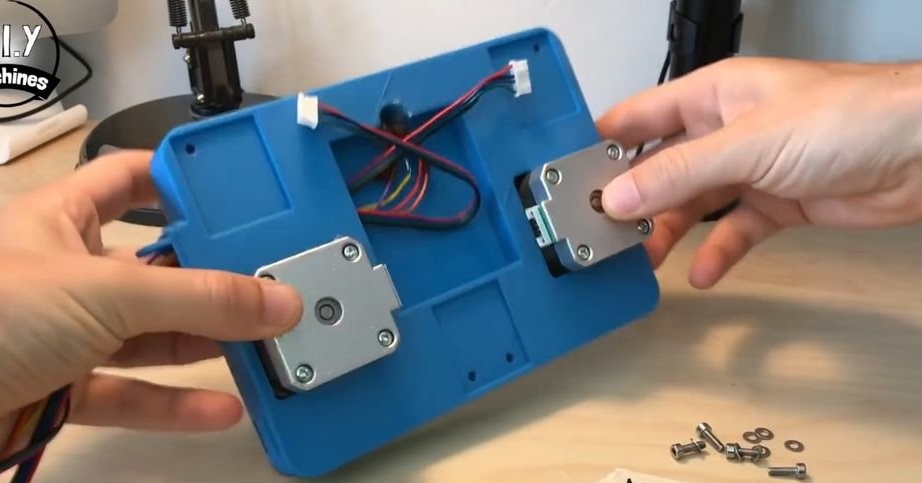
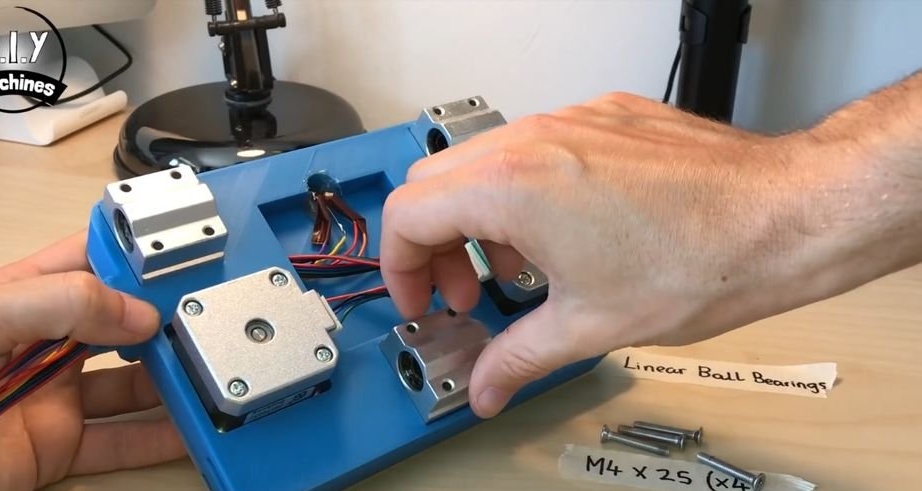
Instala rolamentos lineares.
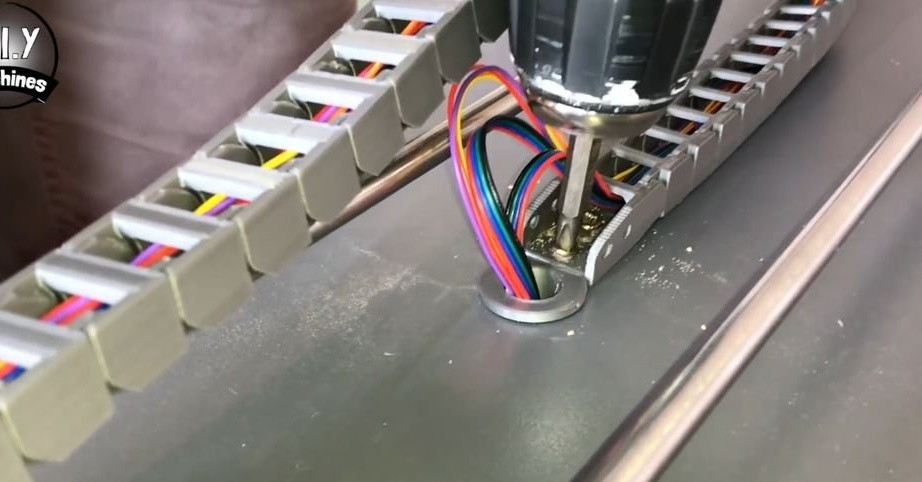
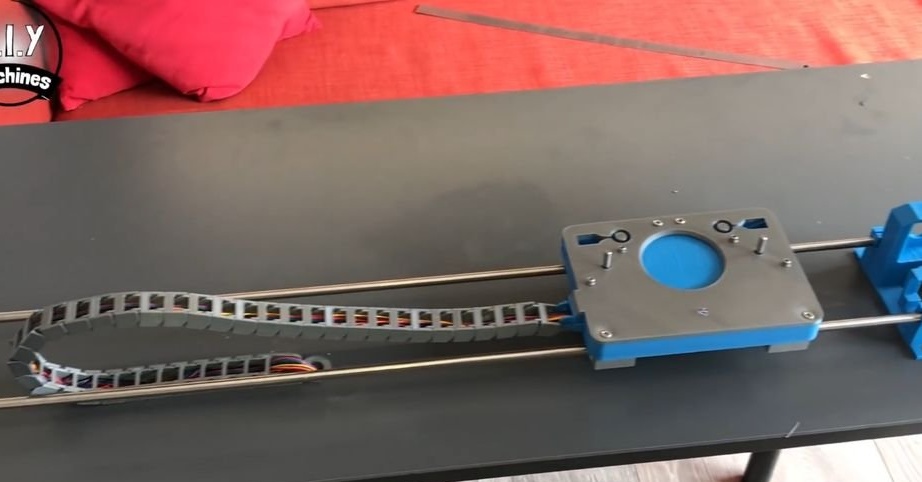
Etapa 6: Canal a cabo
O canal a cabo para o dispositivo consiste em segmentos separados conectados em um único circuito.Dentro do circuito, fios são colocados. A corrente é móvel e dobra, se necessário. Os segmentos de cadeia também são impressos na impressora.


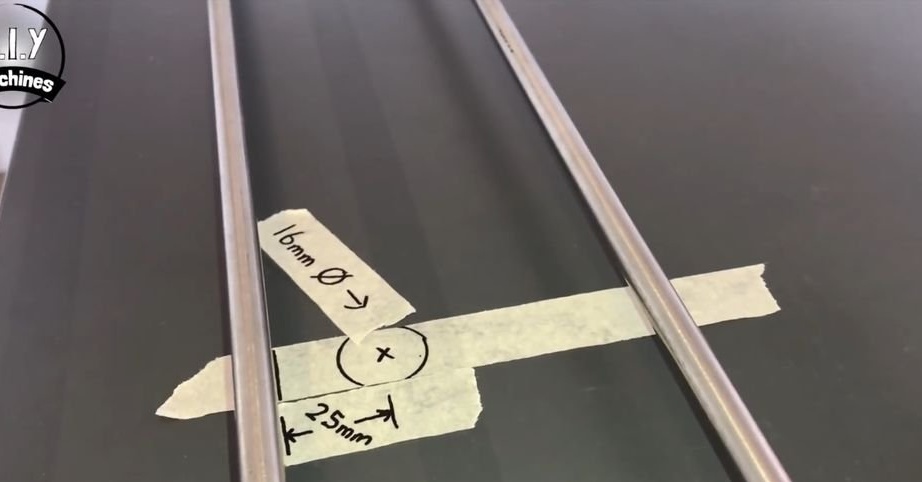
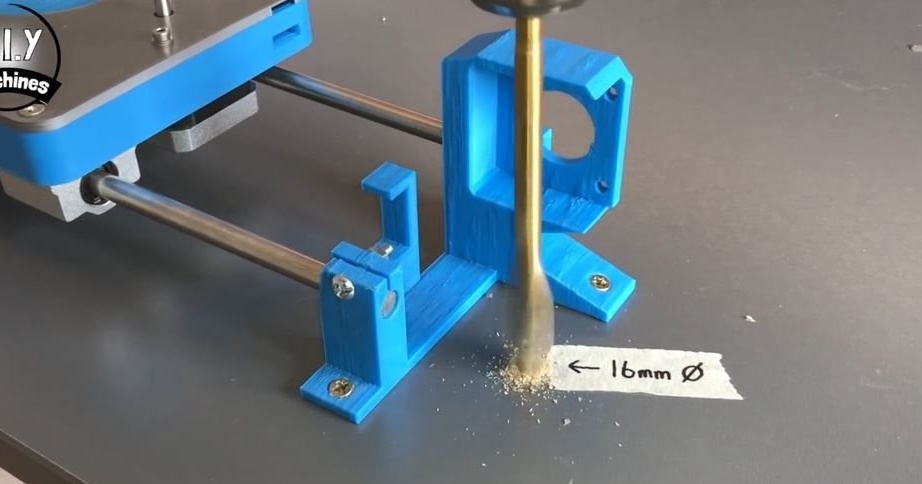
A uma distância de 25 mm da guia extrema e 47 cm do tensionador, faça um furo de 16 mm. Insere a manga "Table_Tidy.STL" no orifício. Prende o canal do cabo em uma extremidade da plataforma, a segunda na bancada ao lado da luva. Estica os fios.



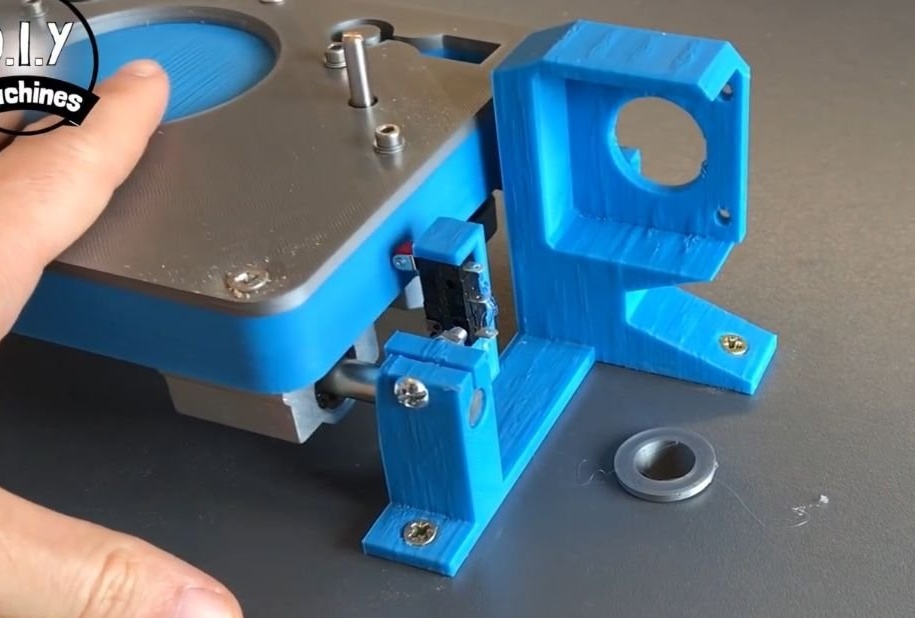
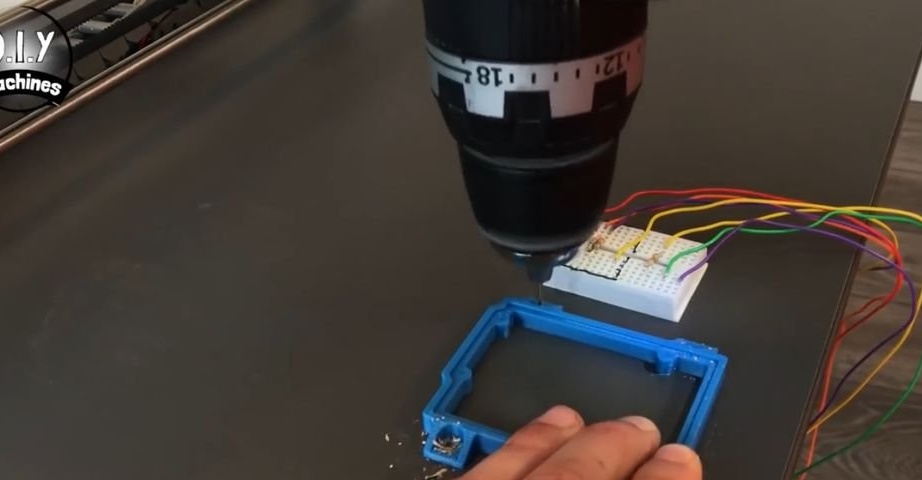
Sétimo passo: mudar
Ao lado do suporte do motor, outro furo de 16 mm é perfurado. Insere uma manga nele. Prende o trailer ao suporte. Solde seus contatos por 1 metro de fio.

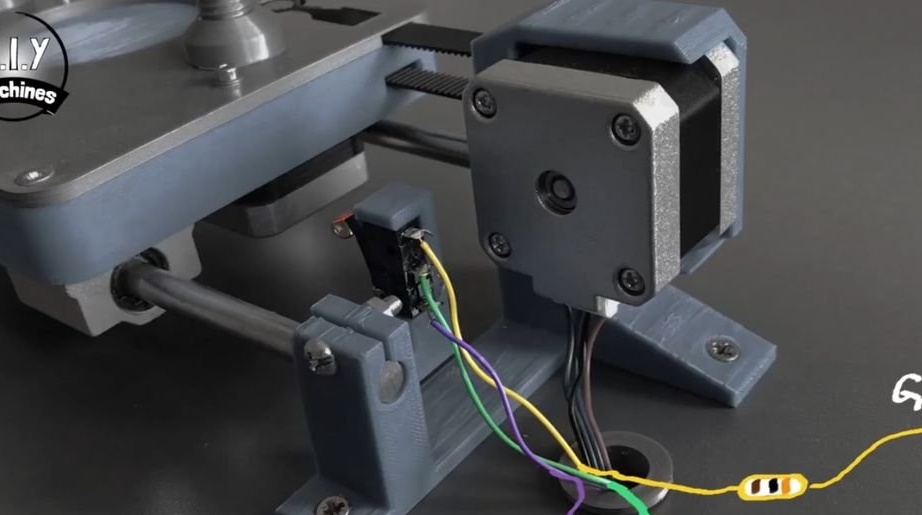
Etapa oito: motor do eixo X
Protege o motor para montar.

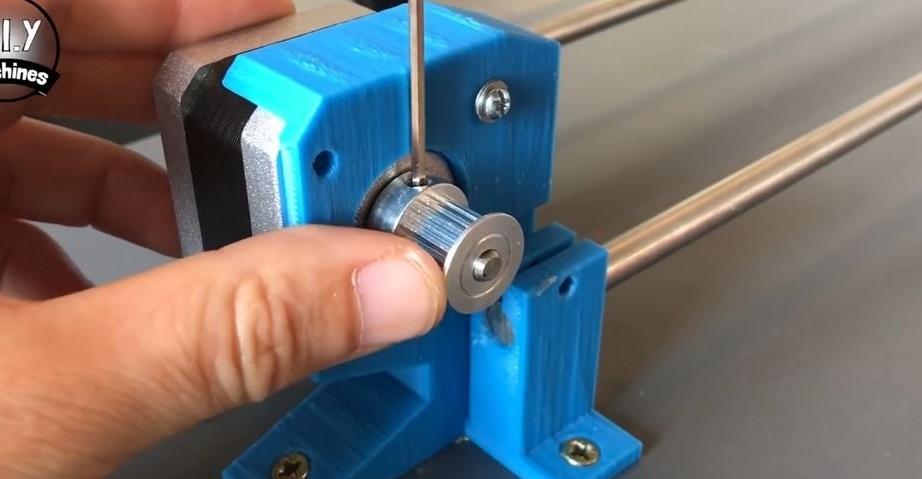
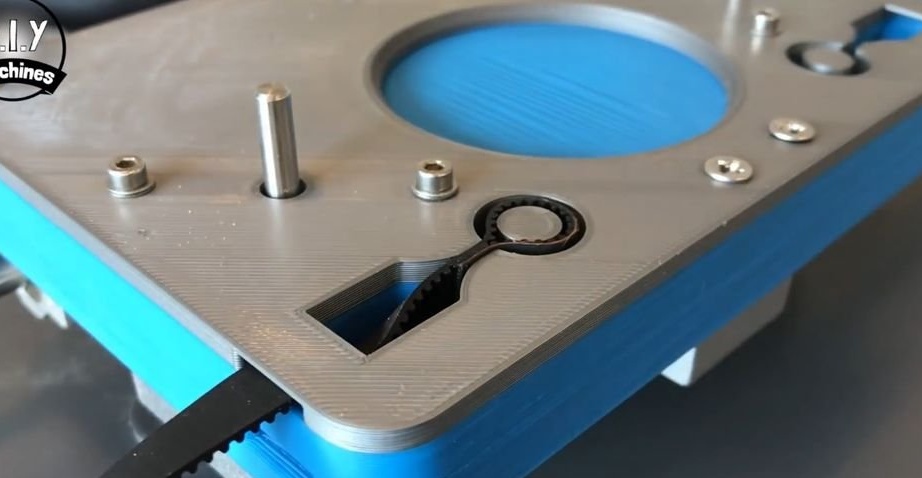
Passo Nove: Cinto
Prende a polia ao eixo do motor. Prende a extremidade do cinto aos suportes da plataforma. Puxa a correia pela polia e pela polia tensora. Prende a segunda extremidade aos suportes. Se necessário, a tensão da correia pode ser ajustada apertando ou desaparafusando o parafuso.







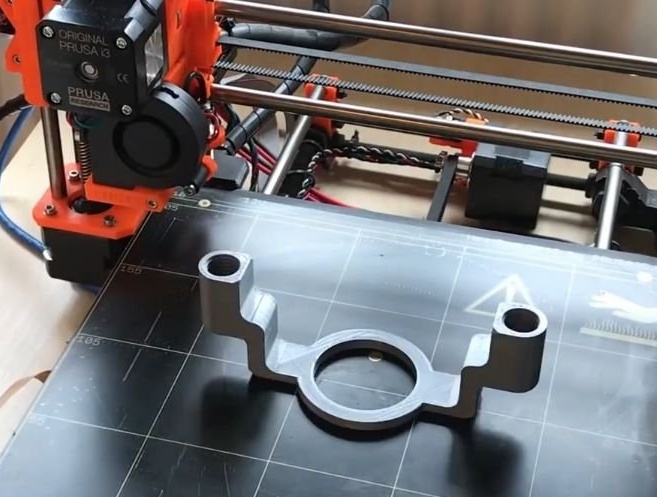
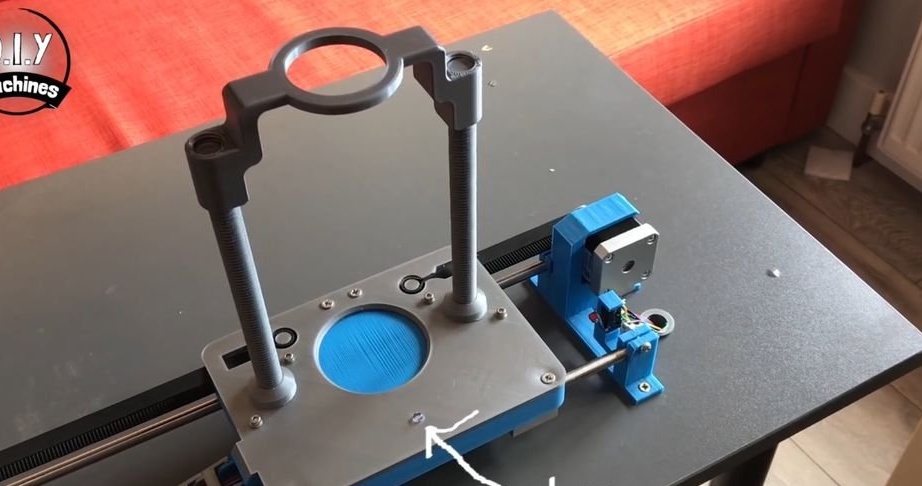
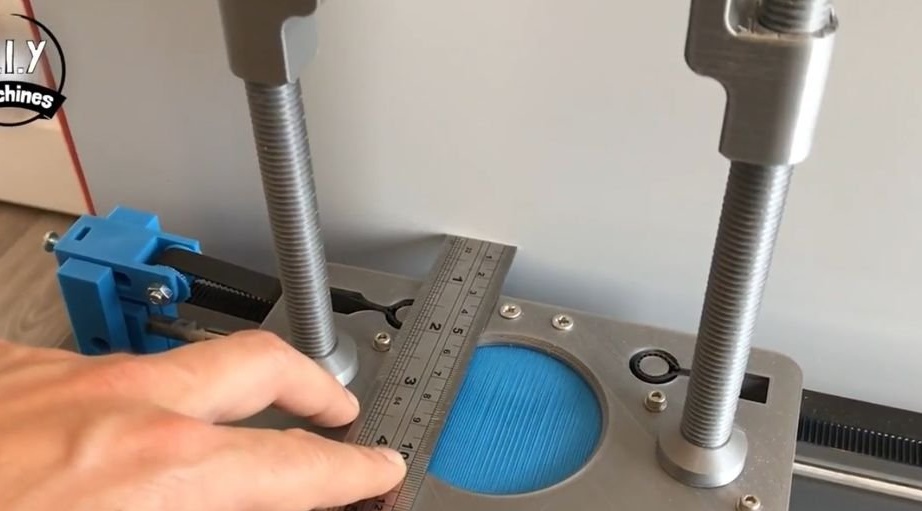
Passo Dez: Suporte de Copo
Imprime duas hastes roscadas main_rod2.3.STL e o suporte Dispenser_Paddle_V2.STL. Aperta em uma plataforma.



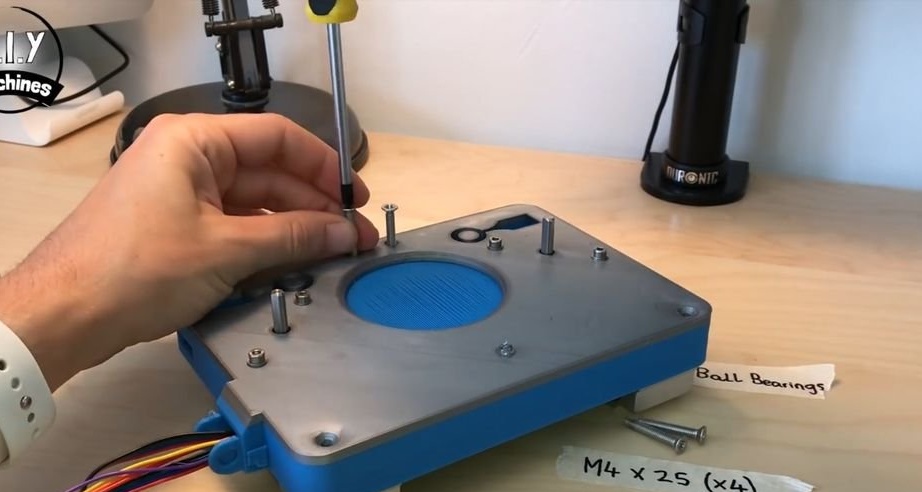
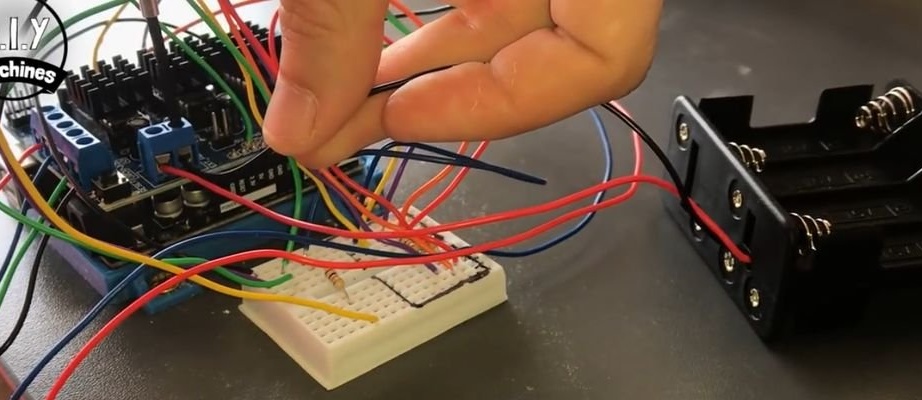
Etapa onze: indicador, reboque, tábua de pão
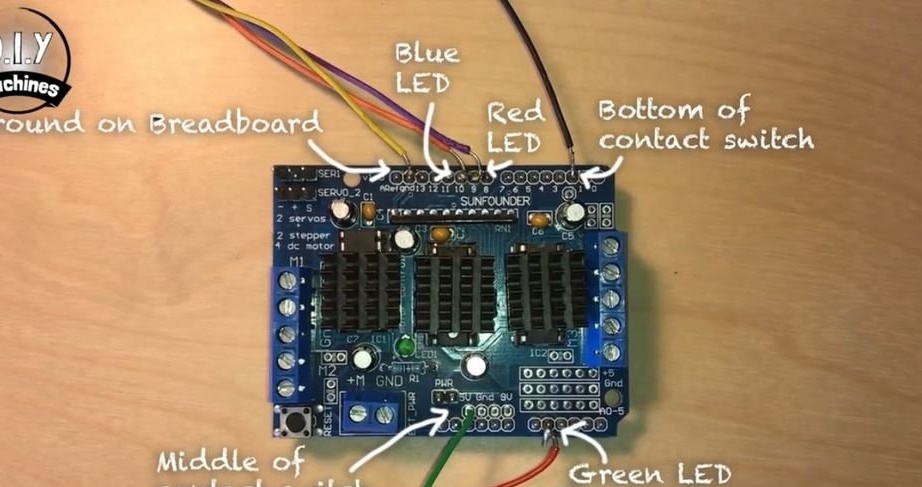
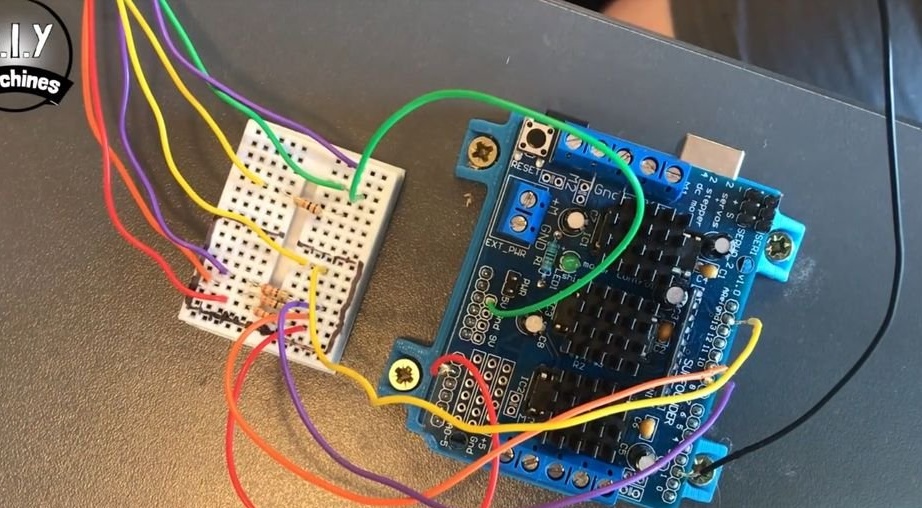
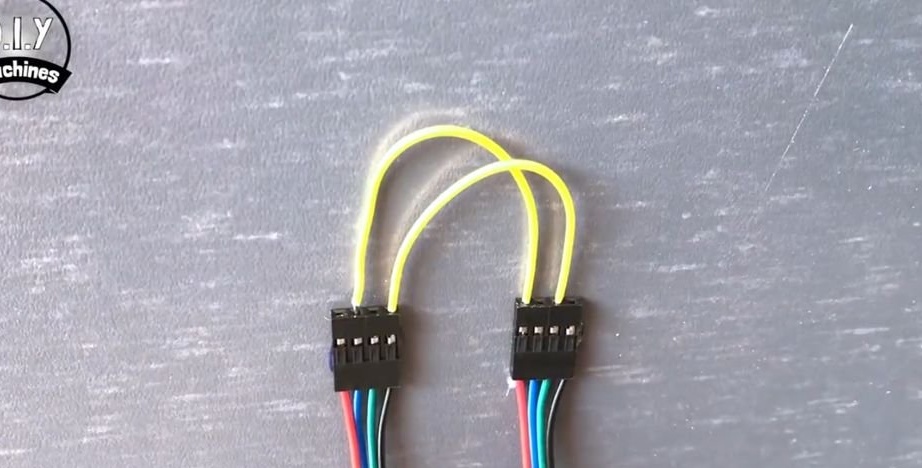
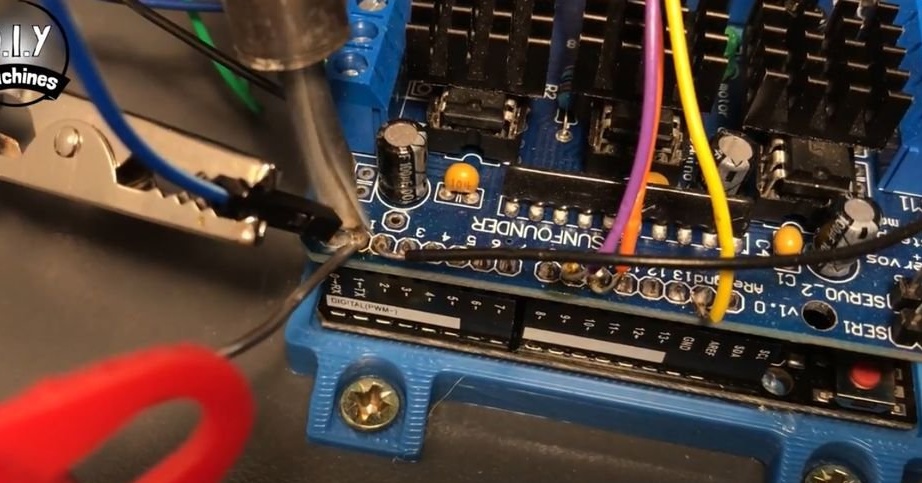
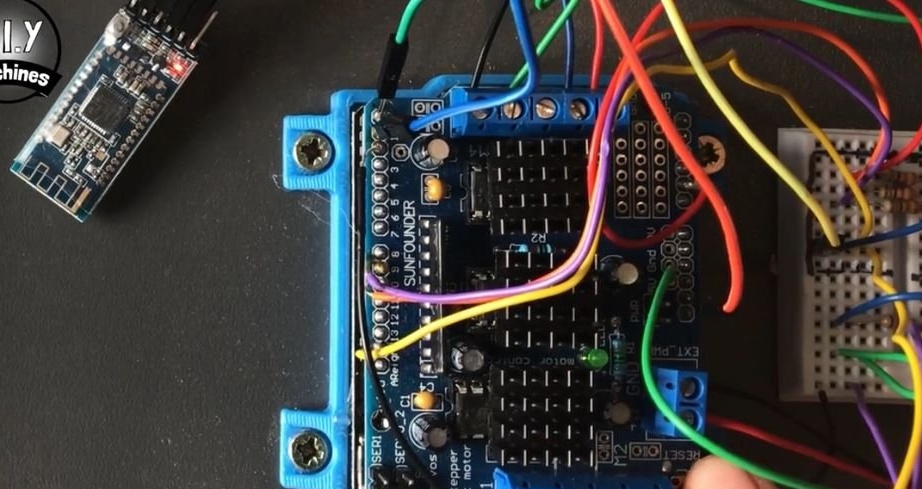
LED RGB, tem quatro pernas. Uma perna é comum e três em cores. O mestre leva mais quatro fios, cada um com cerca de 15 cm de comprimento, e os solda da seguinte forma (pelas cores do brilho do LED) ao módulo do driver do motor:
Vermelho para fixar D9
Azul para fixar D10
Verde para fixar A1
O cátodo para o pino GND.
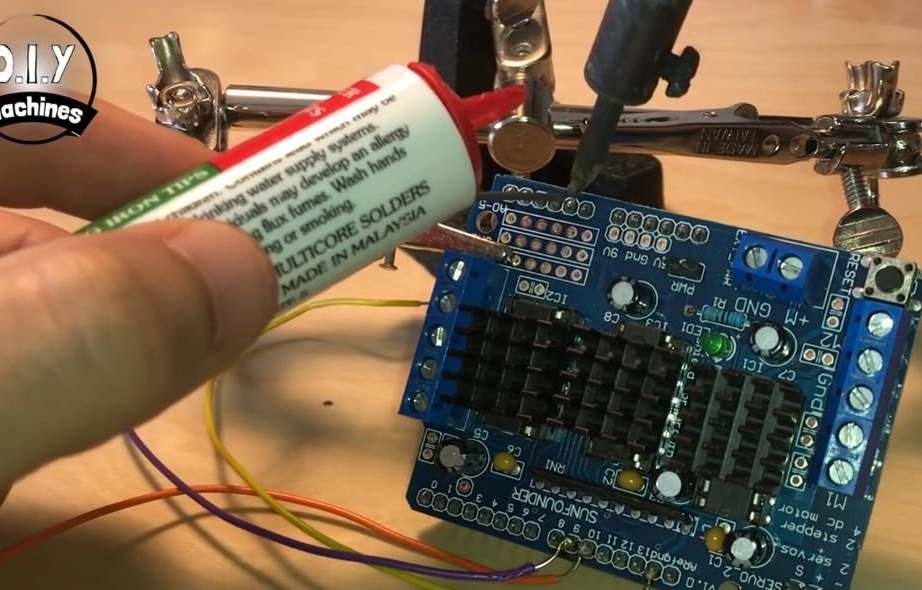
Ele conecta o trailer: o contato superior é GND, o contato do meio é 5 V, o contato inferior é a saída nº 2.
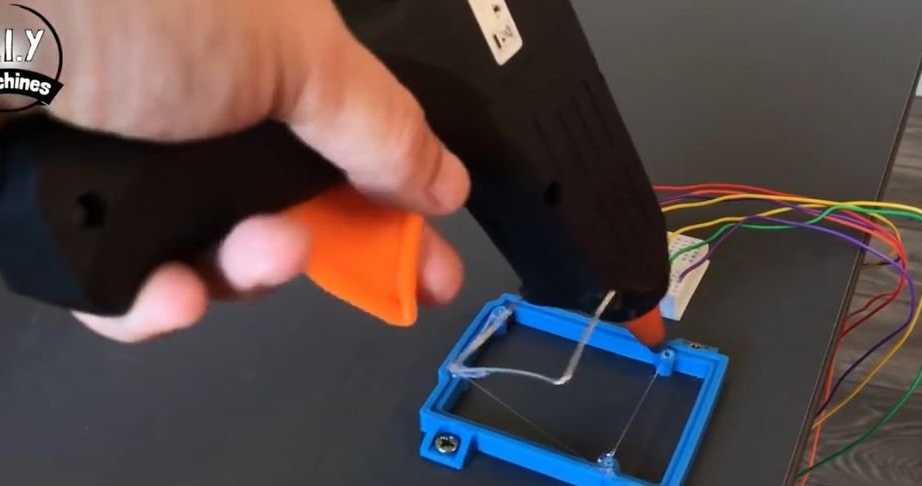
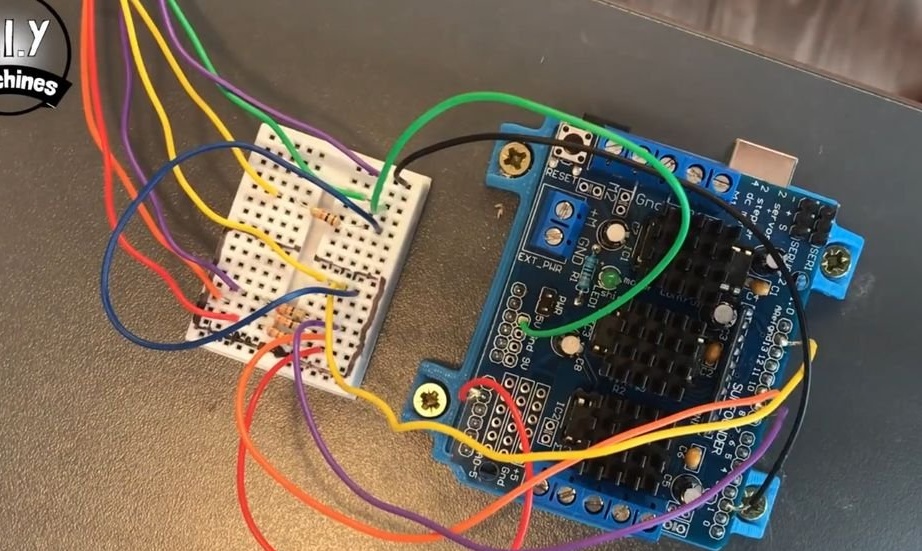
Em seguida, monta tudo em uma tábua de pão (veja a foto). Prende o quadro à mesa.
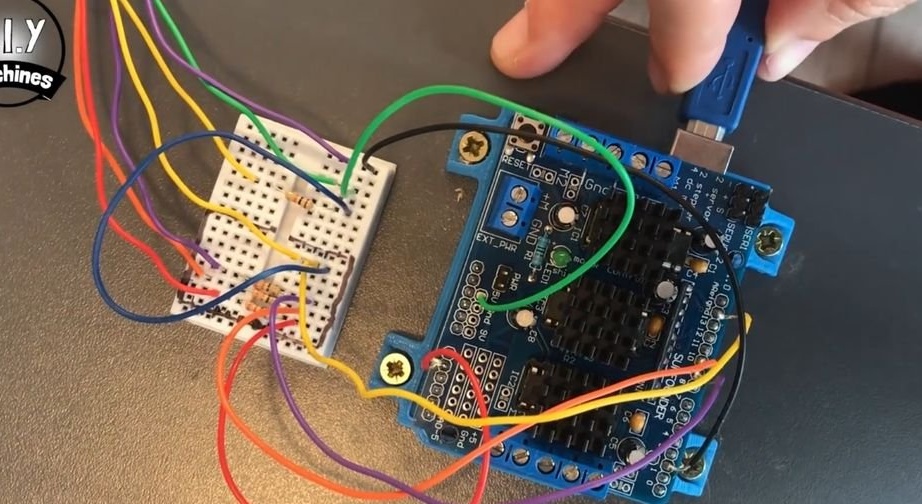
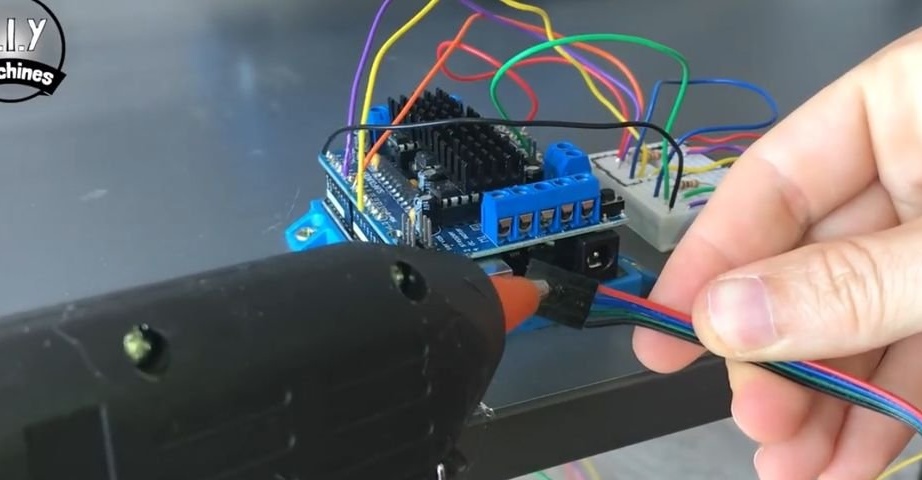
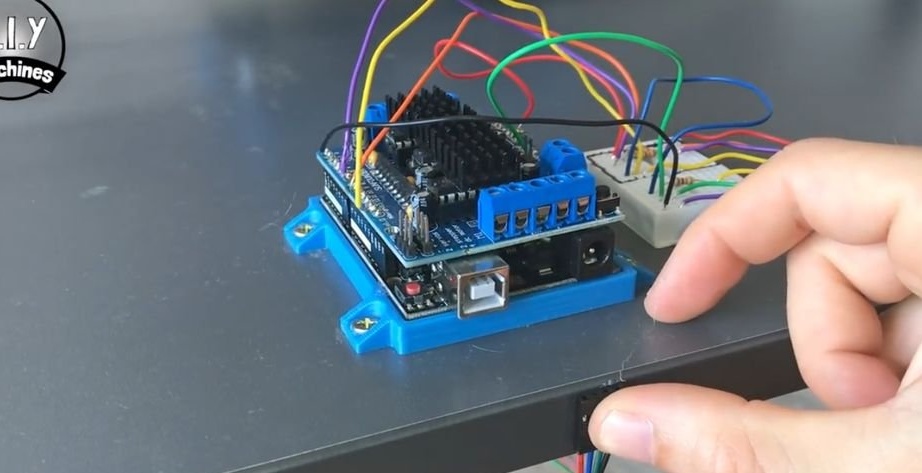
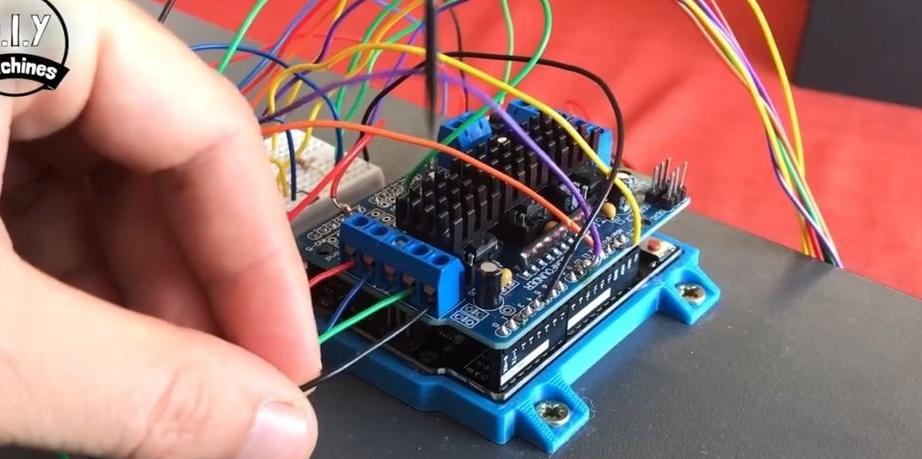
Passo Doze: Arduino
Imprime a placa de montagem para o Arduino. Prende o prato na mesa. Aperta em um prato de Arduino. Instala um módulo de driver de mecanismo no Arduino.
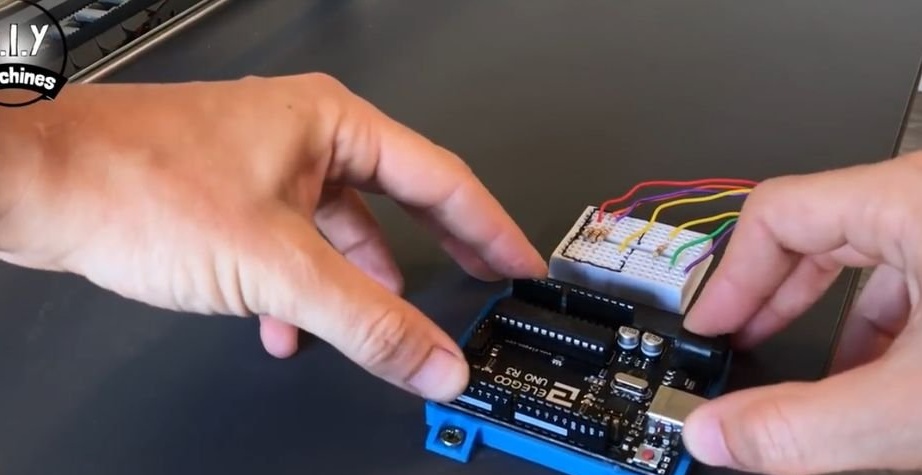
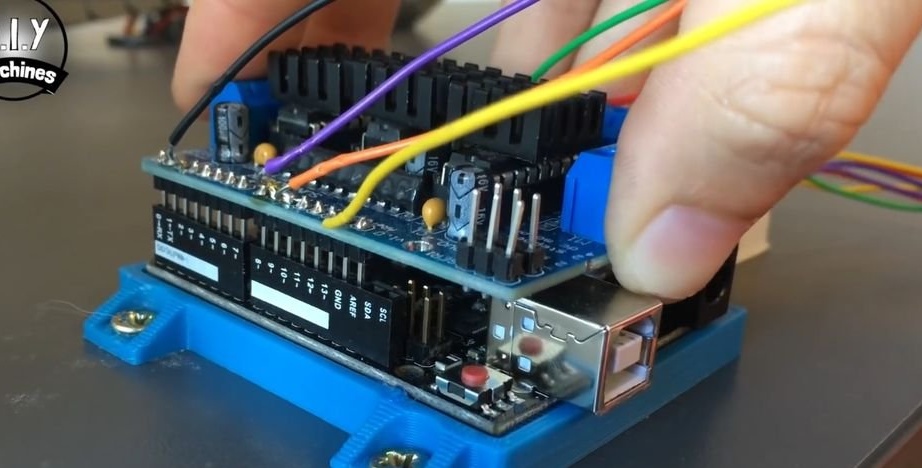
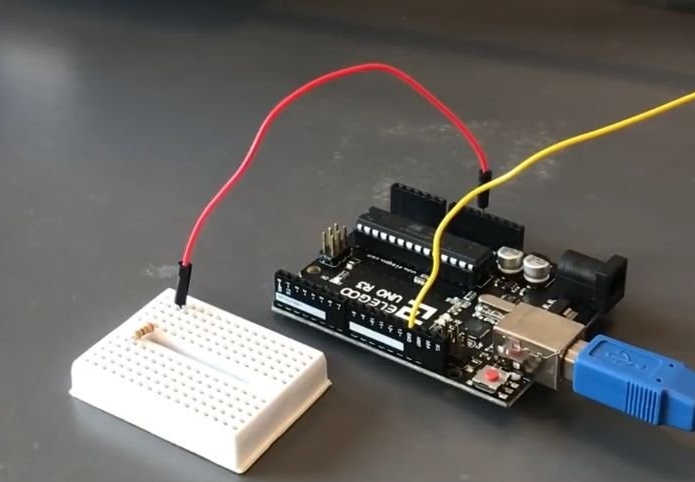
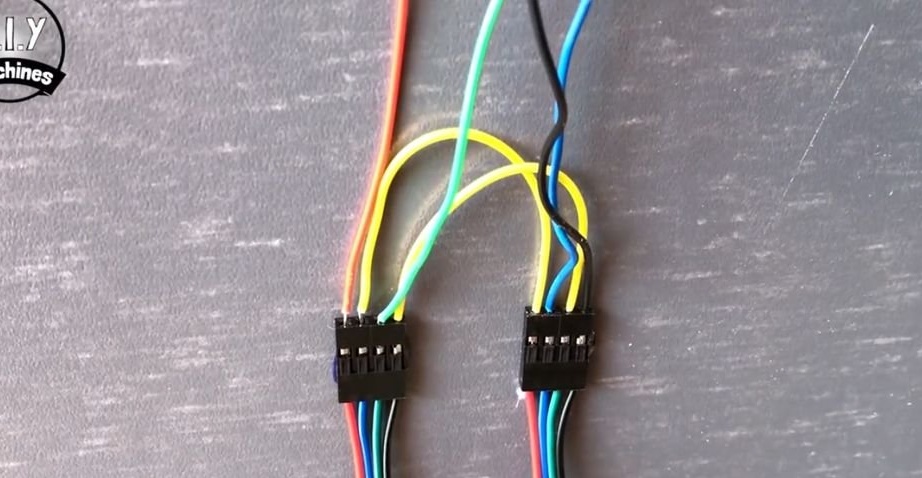
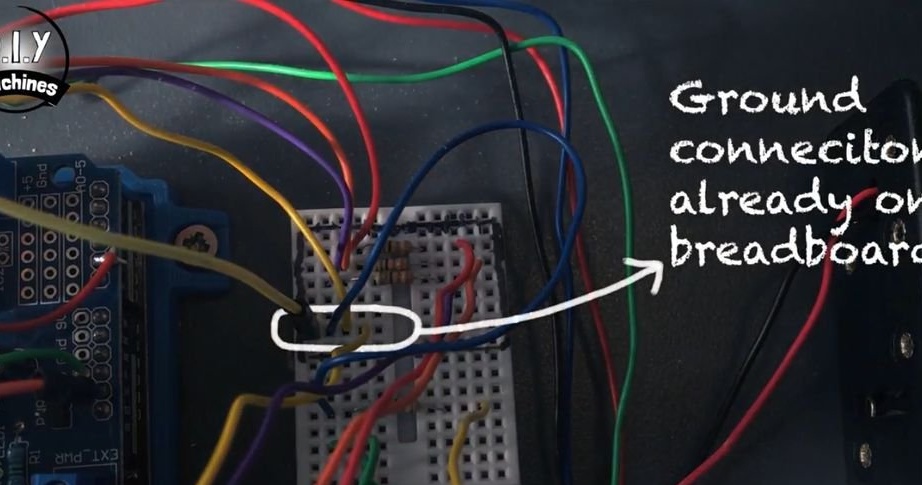
Conecta os fios do driver à placa de ensaio, como na foto.
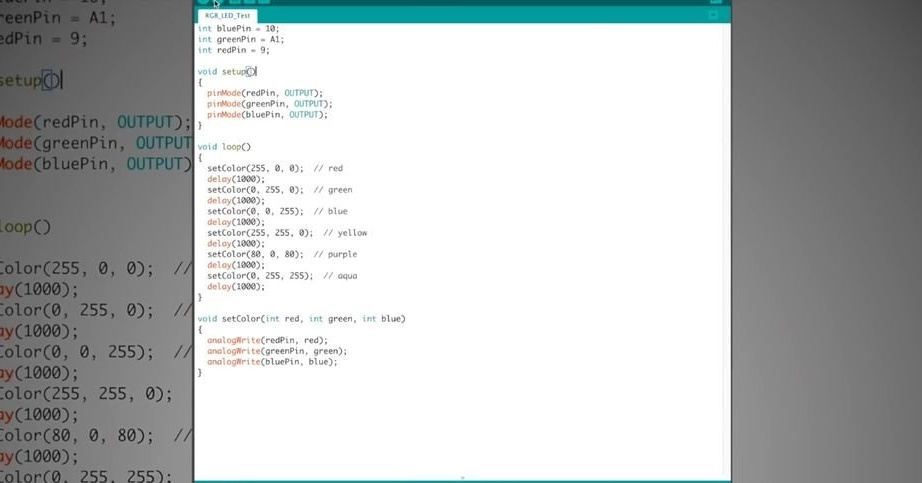
Etapa Treze: Download do Código
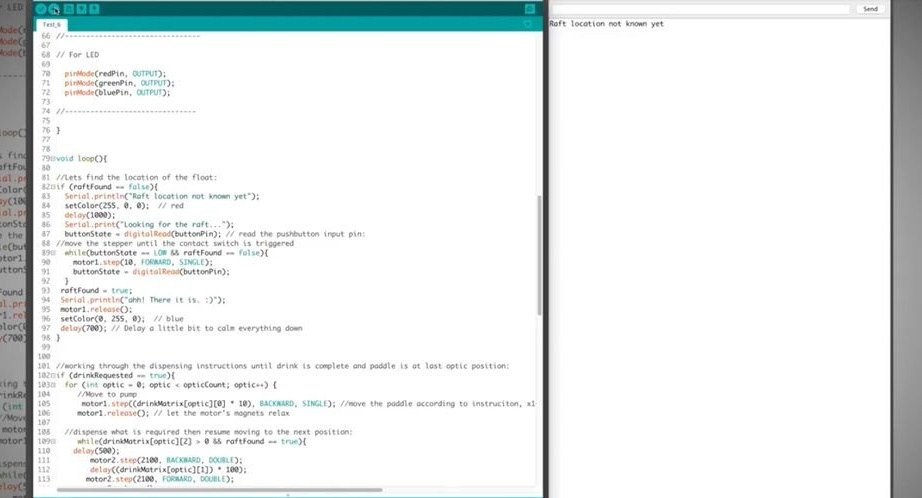
Conecta o Arduino a um PC e baixa o código. Código pode ser encontrado aqui.
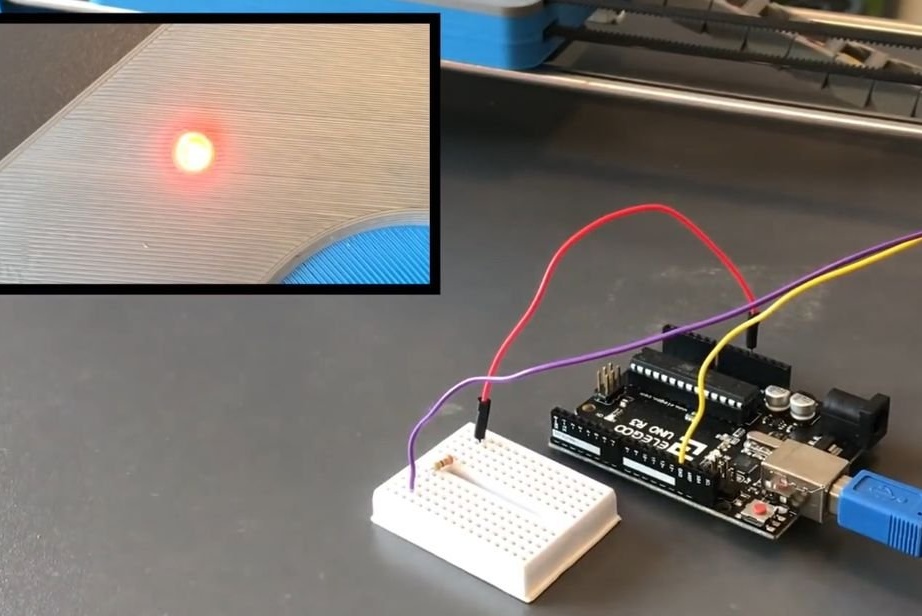
Executa o código de teste do LED. O LED deve acender em cores diferentes.
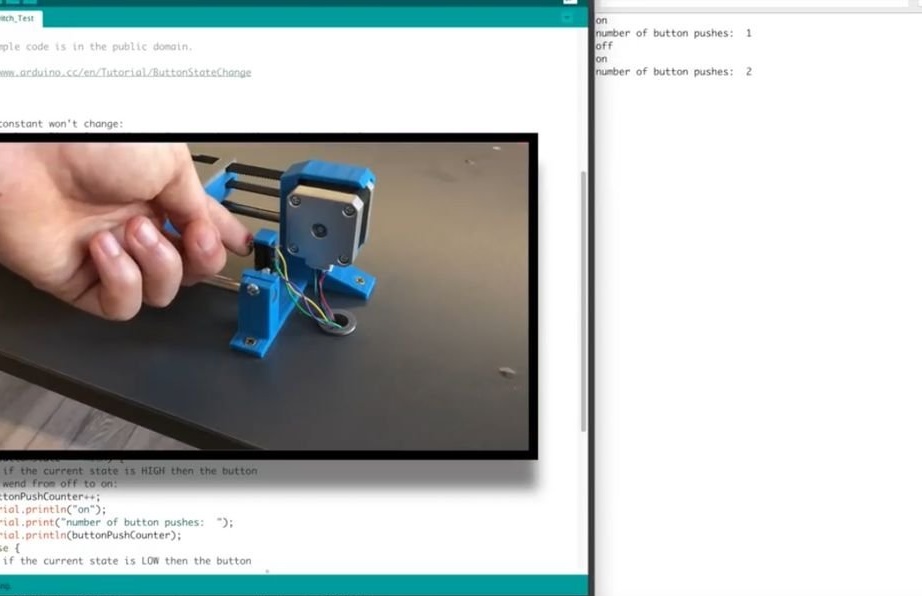
O seguinte script para baixar é "Contact_switch_test". Assim que carregado, cada pressão do interruptor de limite deve ser exibida no monitor.

Etapa catorze: conectando os motores X e Z
Protege o conector que vem do mecanismo X através da tábua de pão sobre a mesa. Conecta-se com os fios do driver.
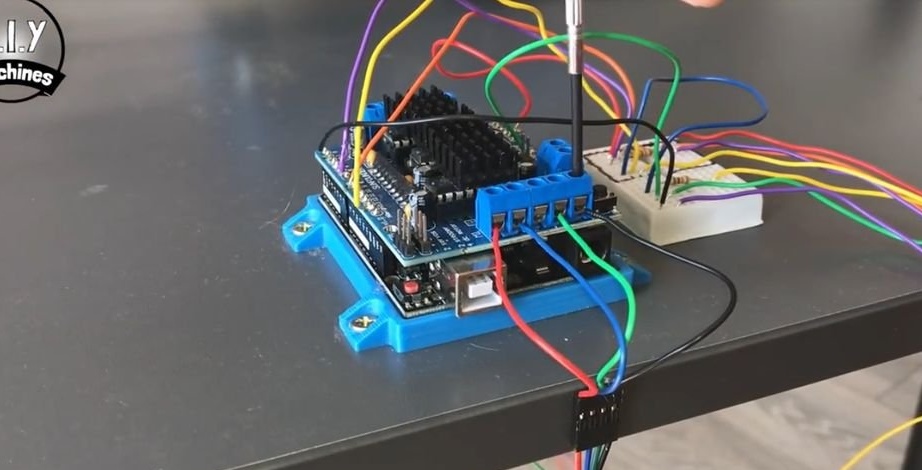
Conecta motores de passo do eixo Z.
Etapa Quinze: Compartimento da Bateria
Remove um jumper em um módulo. Conecta o compartimento da bateria.
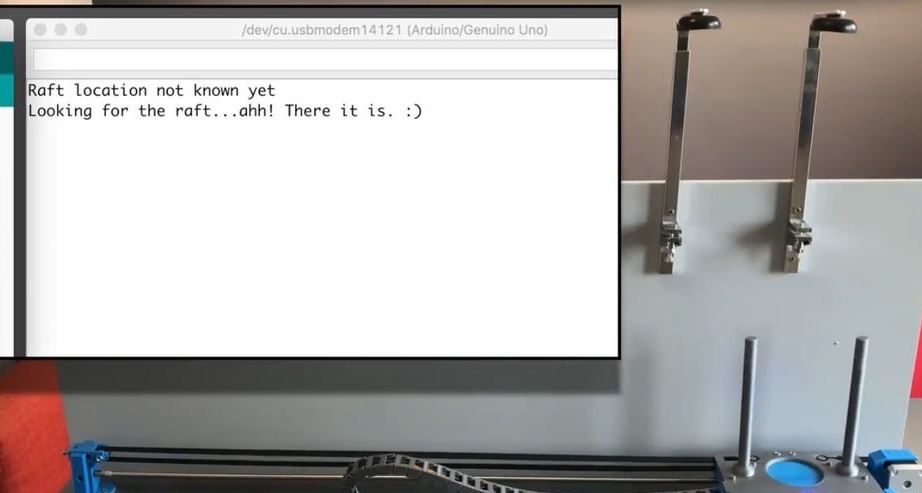
Agora você pode executar o "teste 1". O LED vermelho deve acender e a plataforma deve alcançar o fim de curso. Então o LED ficará verde.
Etapa dezesseis: suportes para garrafas
O uso de suportes protege a parede traseira do MDF.




Move ainda mais a plataforma a 1 cm do interruptor de limite. Alinha o suporte de vidro e prende o suporte de garrafa com o dispensador (infelizmente o mestre não forneceu uma descrição para a fabricação ou compra do suporte). Próximo. os suportes são fixados a cada 12 cm.



Etapa dezessete: código, calibração, teste
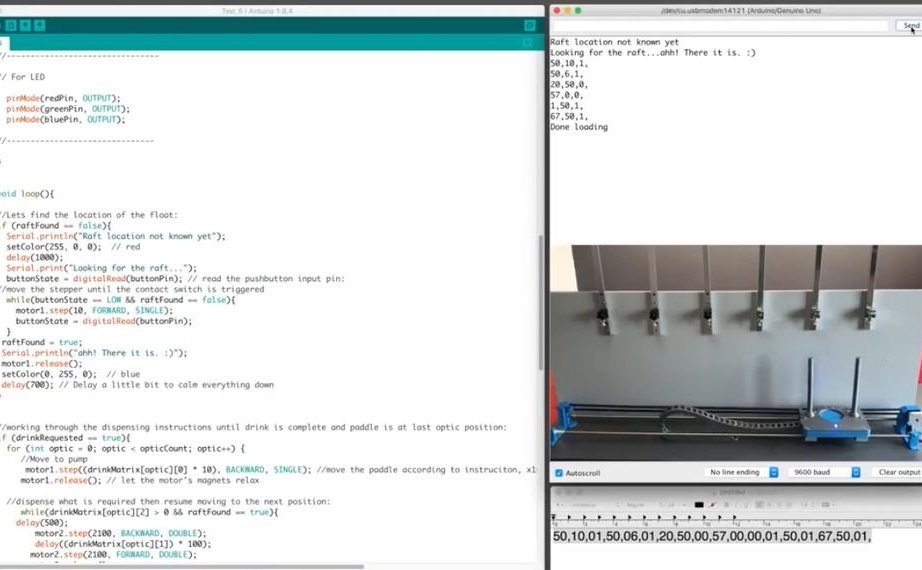
Carrega o código principal em https://www.thingiverse.com/thing:2478890
Os seguintes valores são definidos na configuração: 50,10,01,50,06,01,50,50,00,57,00,00,50,50,02,50,50,00. O mestre tem seis dispensadores. Nas configurações, existem seis grupos de três, em que o primeiro dígito é a distância do interruptor de limite, o primeiro distribuidor, o segundo distribuidor, etc., o segundo dígito é o momento em que a bebida foi derramada no copo, o terceiro é o número de vazamento. Todos esses valores podem ser alterados conforme necessário.


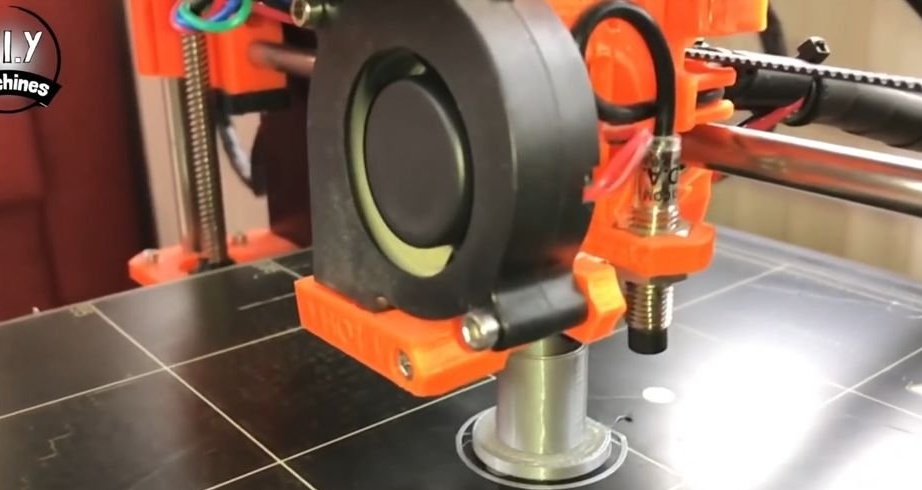
A primeira bebida que o dispositivo preparou foi gim e cola. Para equalizar a pressão na garrafa com cola, você precisa fazer um buraco. Em seguida, o assistente define os parâmetros necessários.



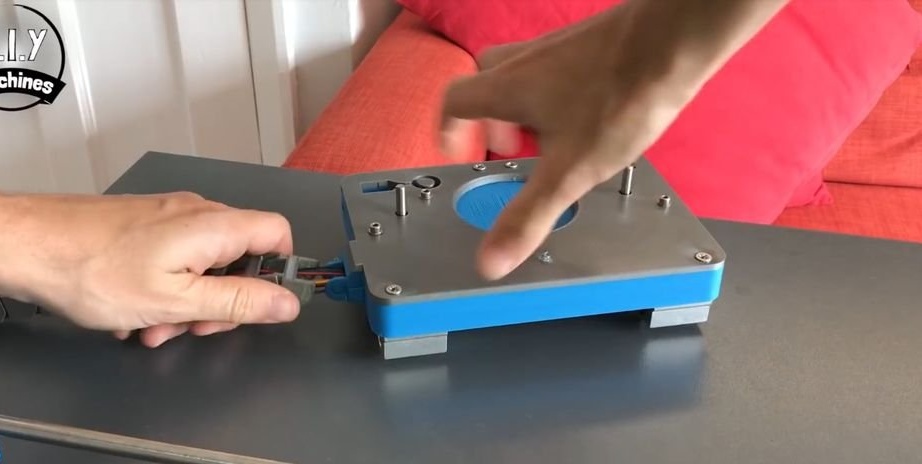
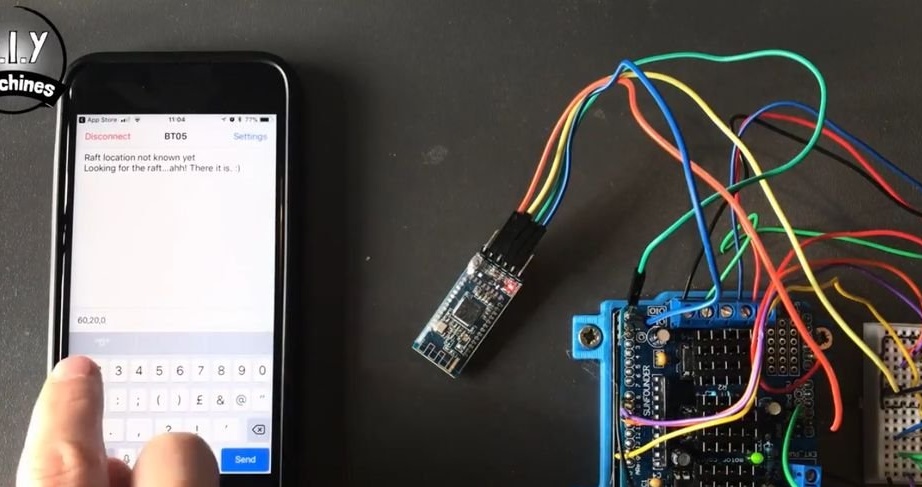
Etapa dezoito: módulo bluetooth
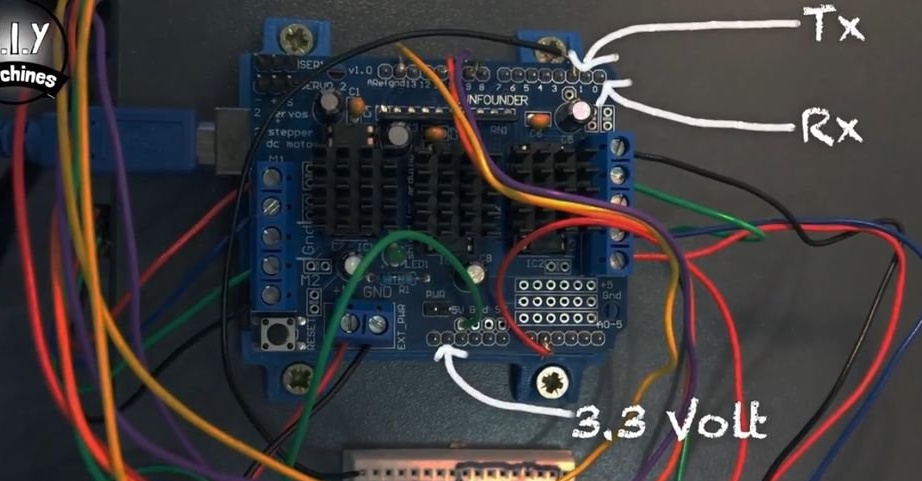
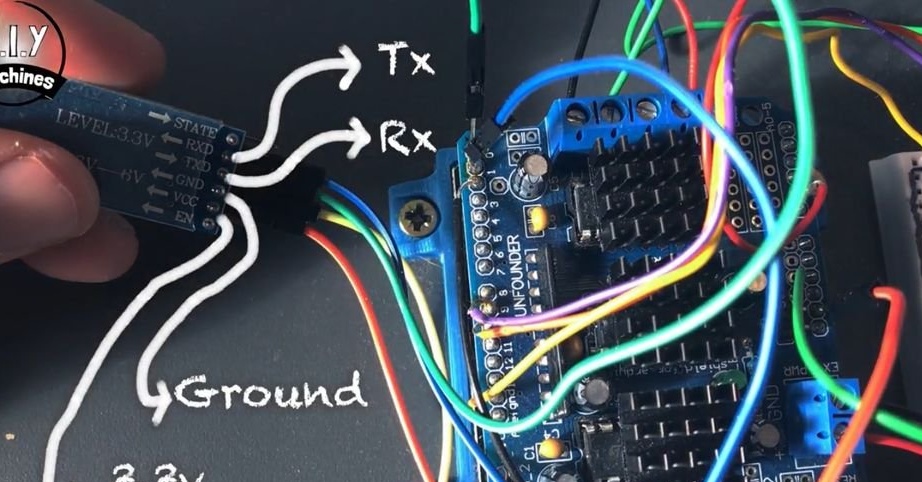
Para controlar o barman a partir do gadget, o mestre instalou um módulo Bluetooth. O módulo se conecta da seguinte maneira.
HM10 -> Escudo do Arduino
RXD ------> TX
TXD -------> RX
GND ------> Terreno
VCC ------> 3.3V

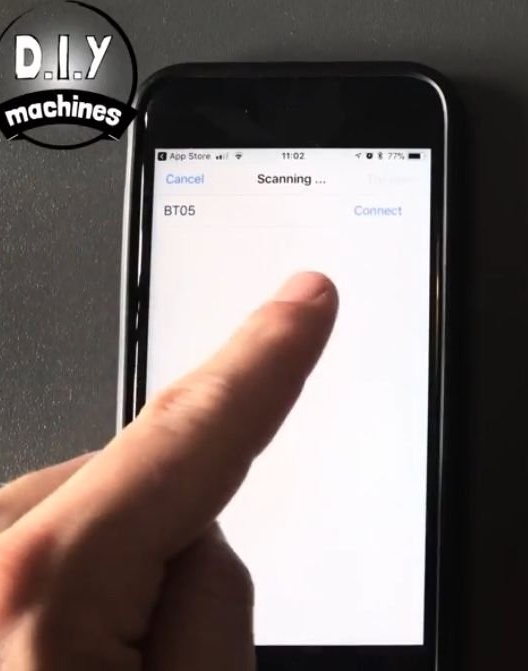
O mestre possui um smartphone executando o iOS. Para esse sistema, ele baixa o "hm10 bluetooth serial lite" na loja de aplicativos. Em seguida, estabelece conexões e entra nas configurações.

Está tudo pronto e, para informações mais completas, alguns vídeos.