
Bom dia a todos os queridos amigos! No artigo de hoje, gostaria de mostrar uma ideia bastante interessante caseiro, o que pode ser feito por quase qualquer pessoa que tenha feito pelo menos um pouco bordado e quem sabe um pouco sobre o Arduino.
Em geral, hoje faremos simples robôs aspirador de papelão faça você mesmo. Mas você me diz, porque eu já lhe disse como tornar um robô mais limpo, e você estará certo, mas esse aspirador de pó robô é muito mais simples, mais barato e mais conveniente do que o anterior. Sim e isso o modelo modificado e com uma aparência melhor e também possui automação completa a bordo. Isto artesanato, não apenas ajudará a passar o tempo, mas também se tornará um assistente indispensável em sua casa ou oficina. Em suma, a coisa é útil e não complicada.
Bem, então, chega do prefácio longo, vamos lá!
E assim, para este produto caseiro, precisamos:
papelão ondulado (muito papelão)
-
fios de conexão
-
-
-Rodas para motores de engrenagem
- driver de drivers para o Arduino (o autor do produto caseiro usa um driver de modelo, que você só precisa inserir no arduino para se conectar, mas você pode usar um driver que seja conveniente para você, o principal é que a tensão coincide com os motores das engrenagens)
-
tampas de garrafa de plástico
- cerdas de uma vassoura
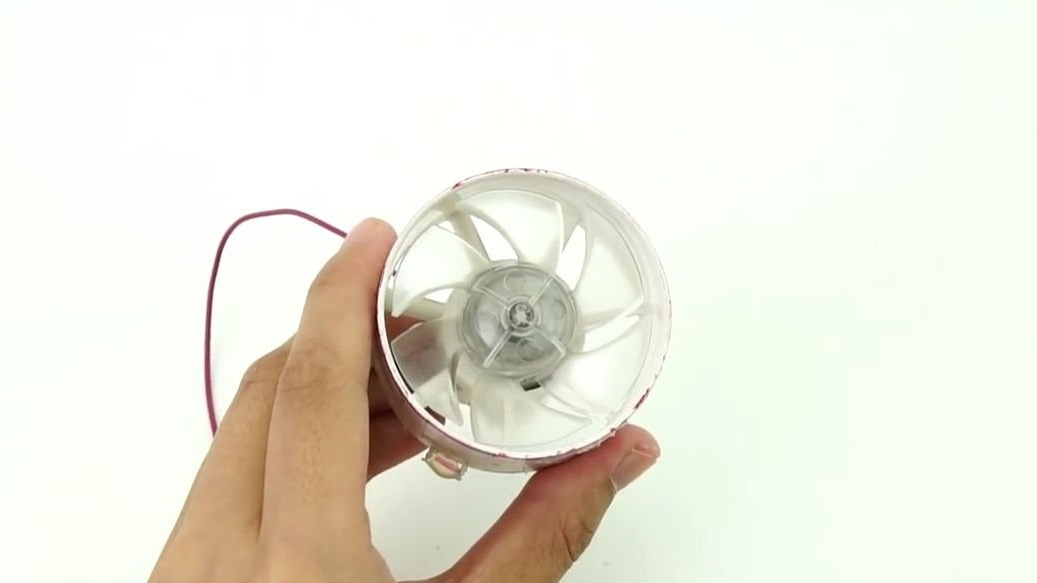
-motor com um ventilador de turbina, em princípio, você pode fazer isso sozinho
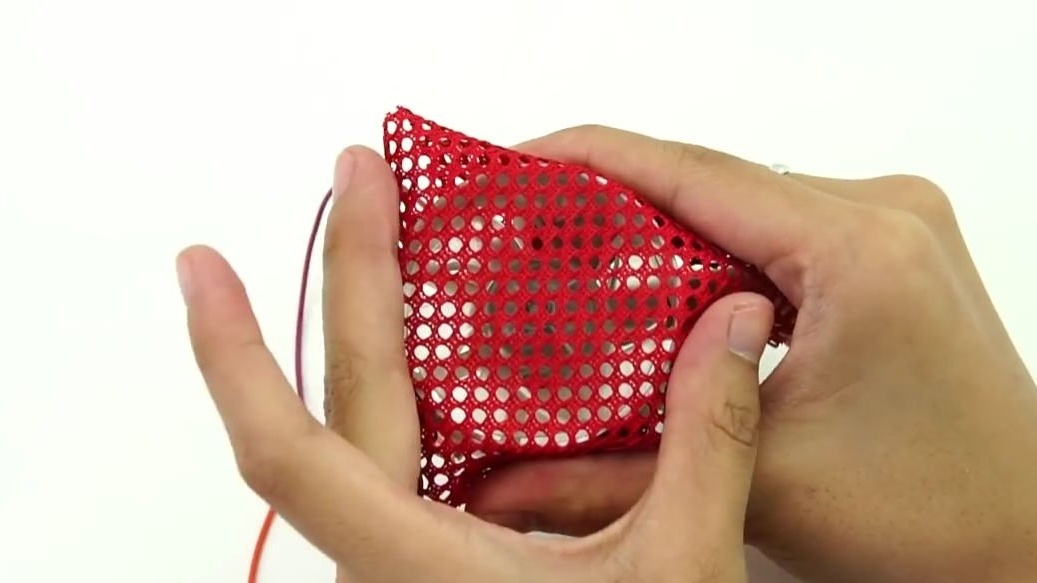
malha de plástico
- recipiente pequeno
caixa para duas baterias 18650
-
Das ferramentas também precisaremos:
ferro de solda
pistola de cola
faca de papelaria
linha
- lápis ou marcadores
O primeiro passo é pegar uma grande folha de papelão, uma régua e uma bússola. Medimos 13 cm com uma bússola e desenhamos um círculo em papelão, após o que o cortamos, no total precisamos de dois desses círculos:


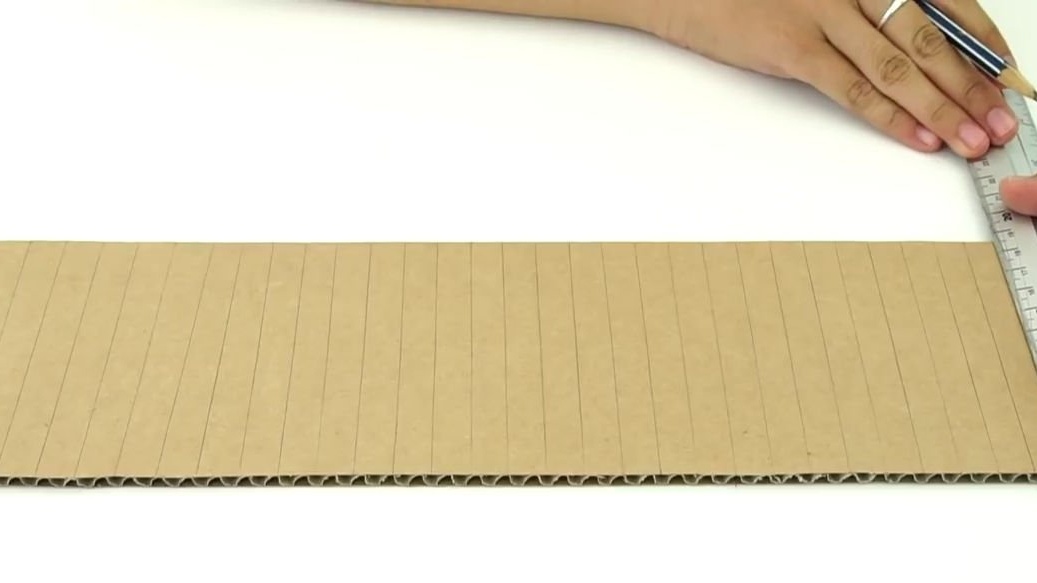
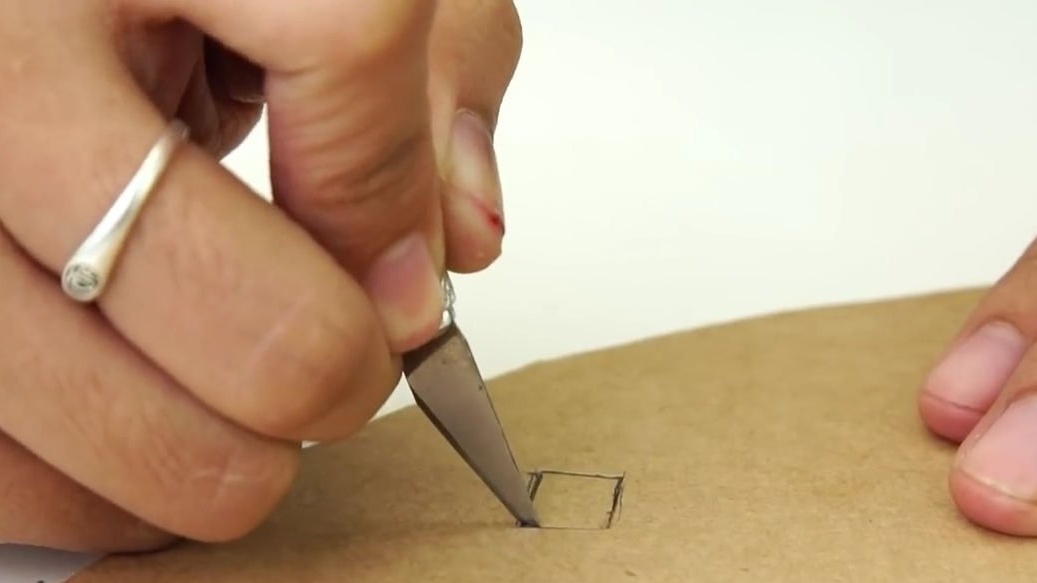
Depois recortamos um retângulo de tamanho pequeno do mesmo papelão. Pegamos uma régua e um lápis, com um lápis, desenhamos um papelão com um intervalo de cerca de 1 cm. Após esse procedimento, pegamos uma faca de escritório e fazemos pequenos cortes da camada superior de papelão, sem tocar no fundo. Isso é necessário para que o papelão fique mais elástico:



Torcemos a peça inicial feita em torno de um dos círculos de papelão e, é claro, colamos com cola quente:

Vamos lidar com a eletrônica e a parte mecânica.
Para começar, pegue o motor de engrenagem e coloque uma roda nele, fazemos o mesmo com o segundo motor:

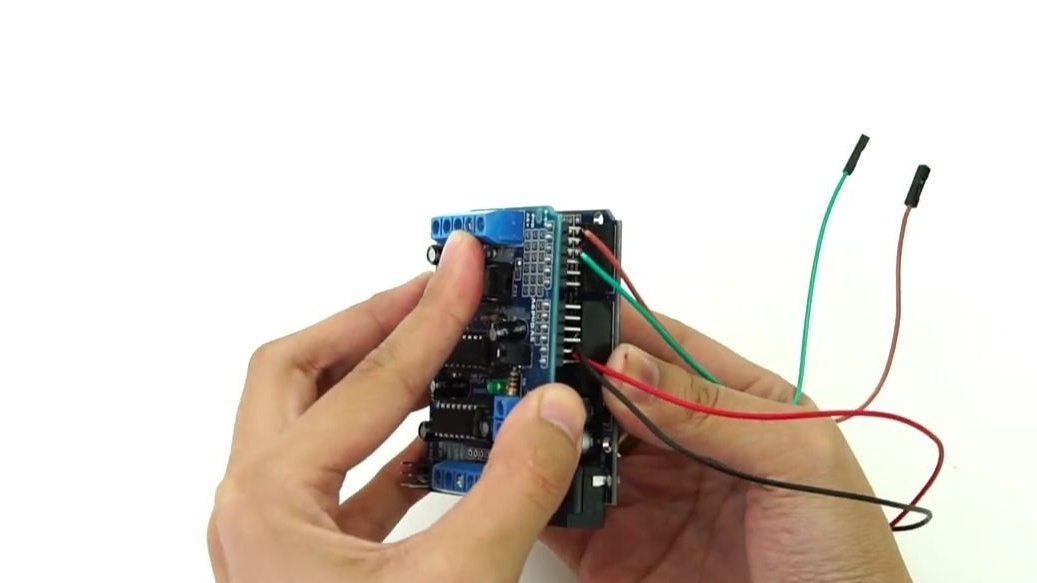
Em seguida, pegamos a placa Arduino Uno e os fios de conexão, que por sua vez devem estar conectados a determinados pinos (contatos) na placa. Por conveniência, adotamos cores diferentes: conectamos vermelho a 5 volts, preto a GND e os outros dois a dois pinos diferentes. Quais pinos para conectar os fios, você deve descobrir imediatamente com base no código ou escrever os pinos aos quais seus fios estão conectados. Em geral, não há nada complicado aqui, nós conectamos:

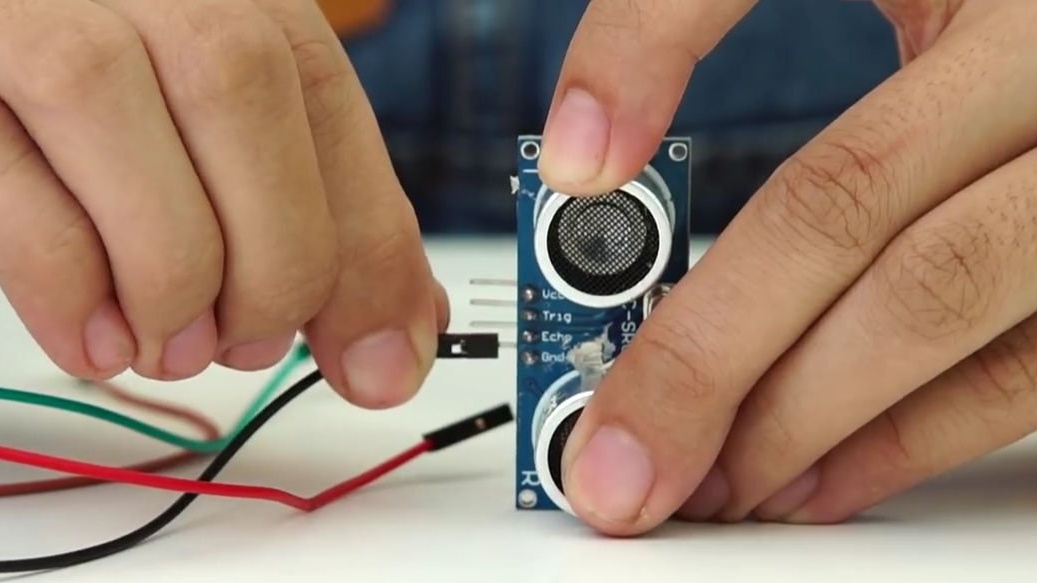
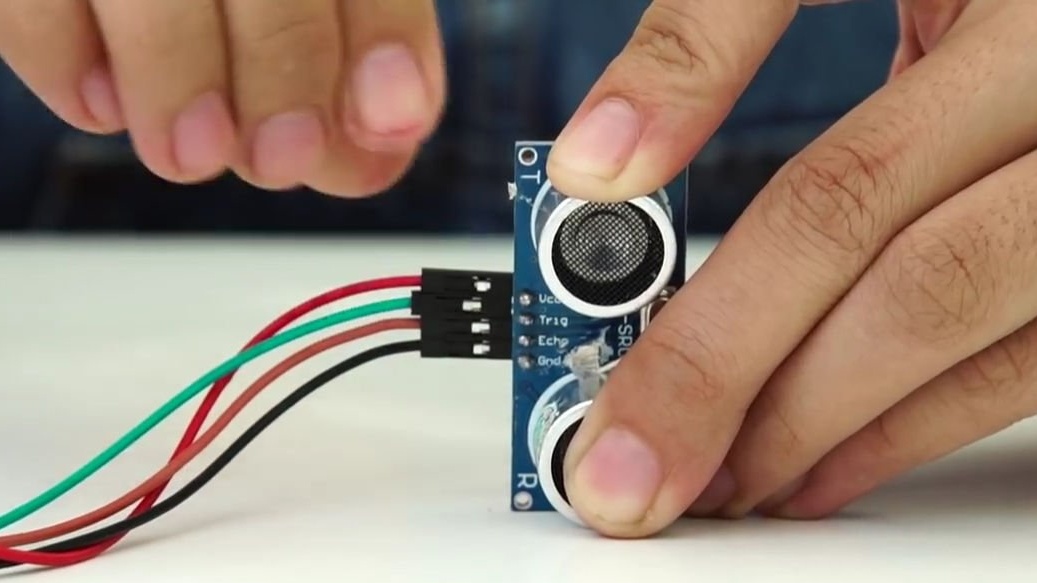
Conectamos o lado oposto dos fios ao telêmetro ultrassônico, como mostra a foto abaixo. Se não estiver claro, você poderá assistir ao vídeo do autor.
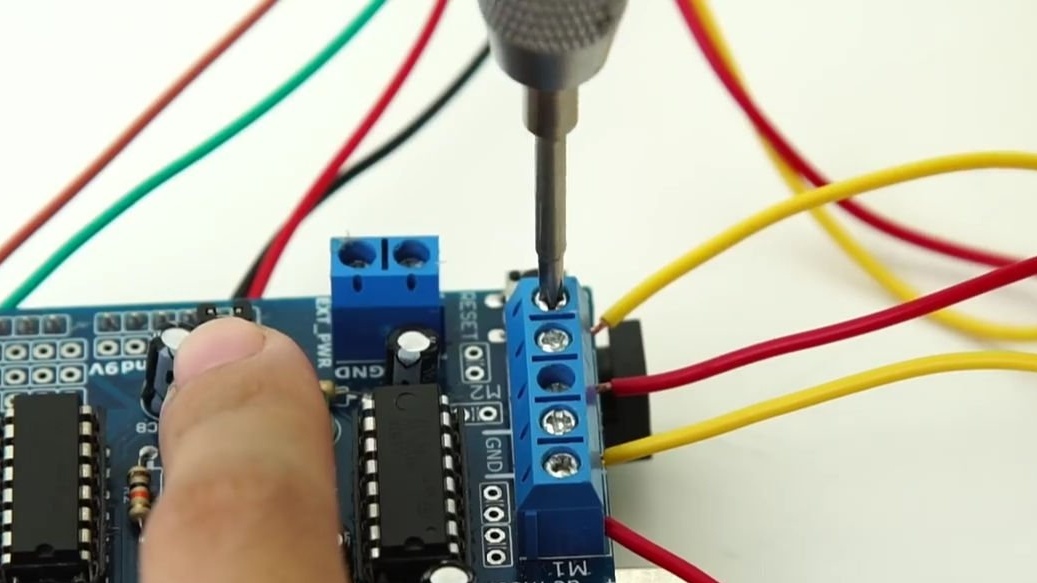
Conectamos os motores à engrenagem, você nem precisa soldar nada, basta inseri-lo nos grampos e é isso:
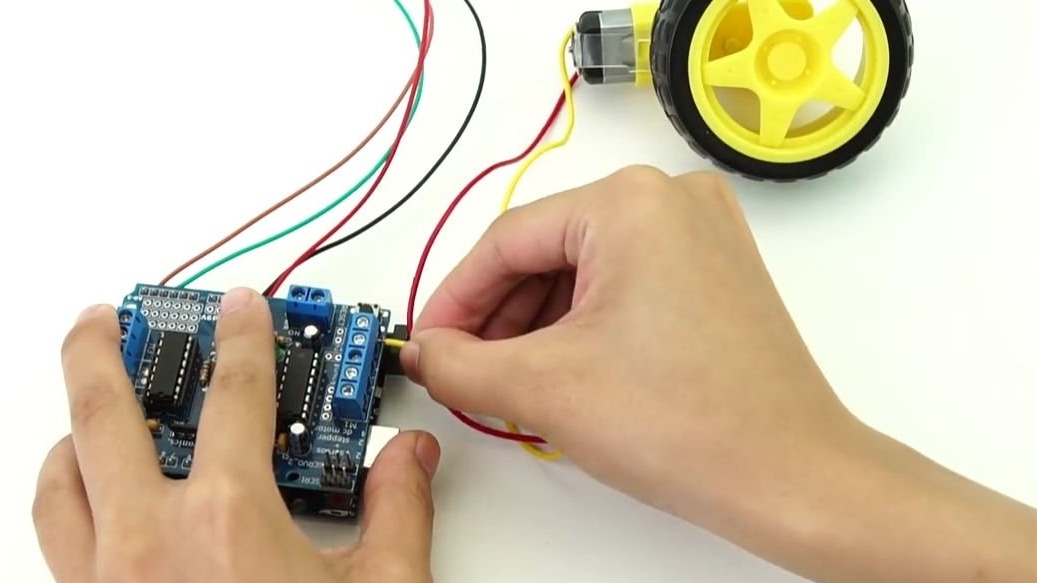

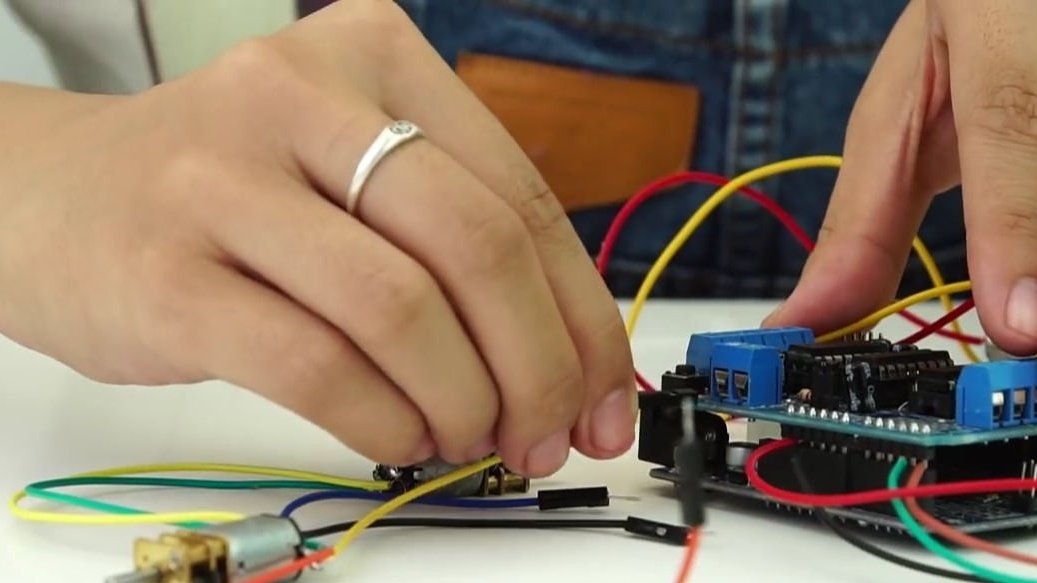
É necessário soldar os fios de conexão aos mini motores, com a ajuda de que vamos conectar esses mesmos motores ao motorista do motor. Em geral, conectamos:
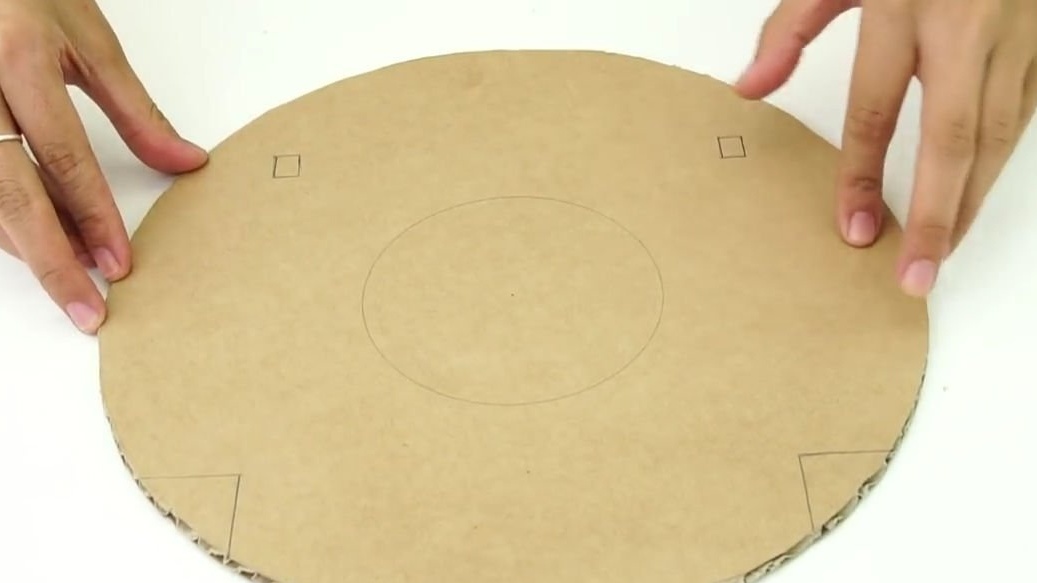
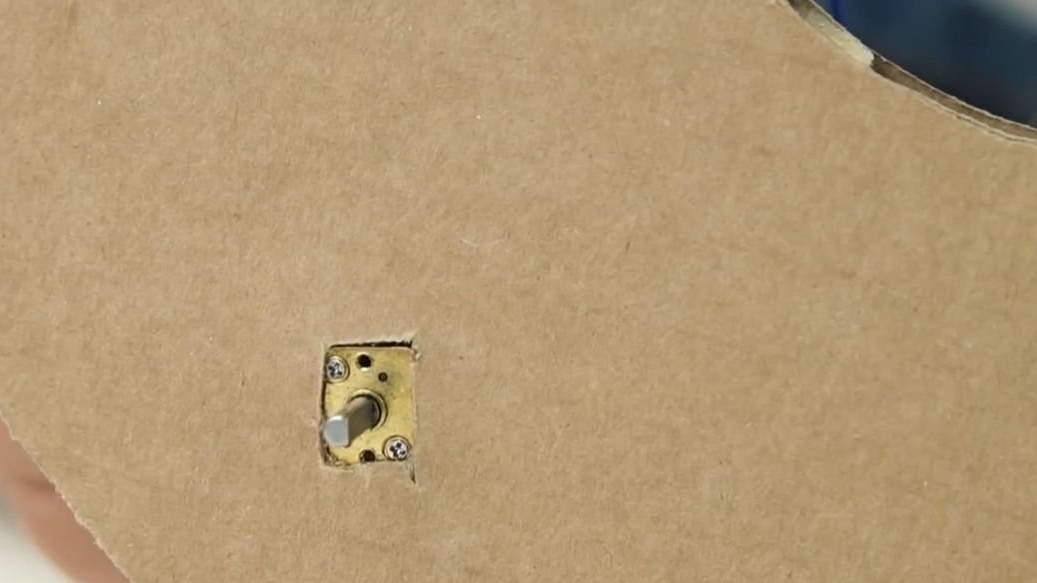
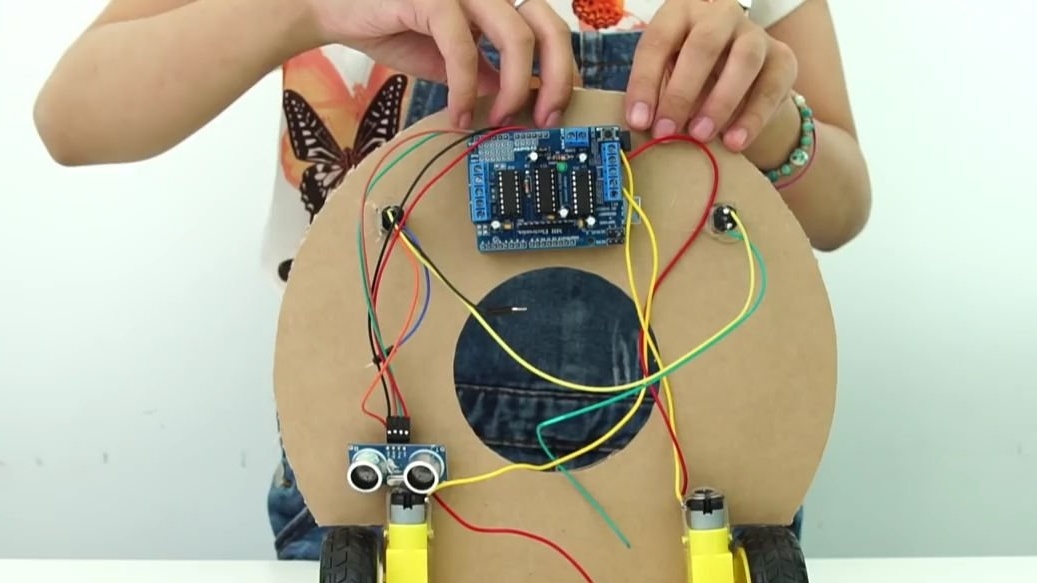
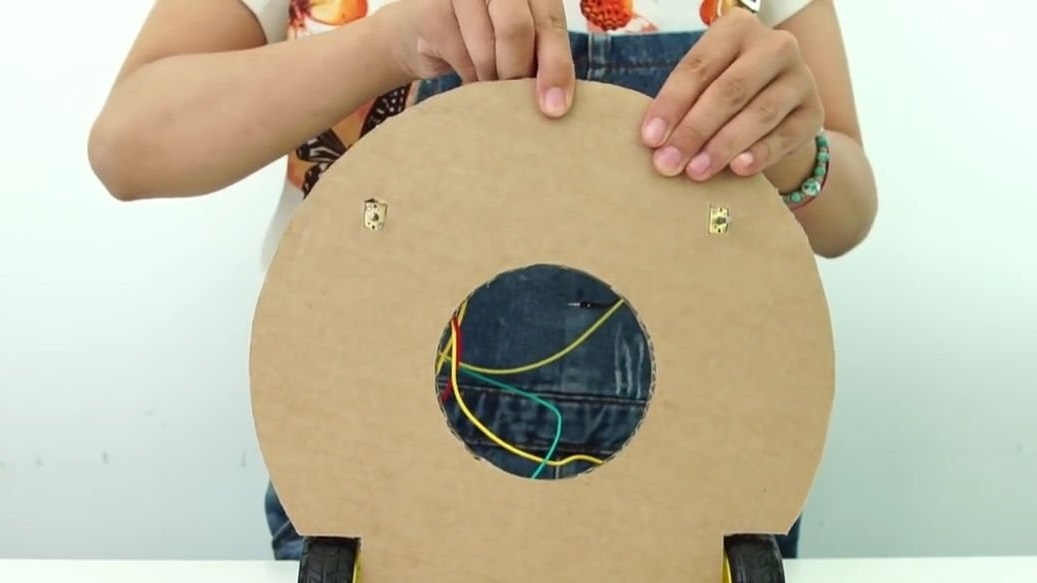
Agora pegamos o círculo de papelão restante, que foi feito no começo. Nele, você precisa desenhar outro círculo no centro e vários retângulos. Você pode ver toda a marcação na foto abaixo. Em seguida, cortamos os orifícios marcados, da mesma forma que na foto abaixo:

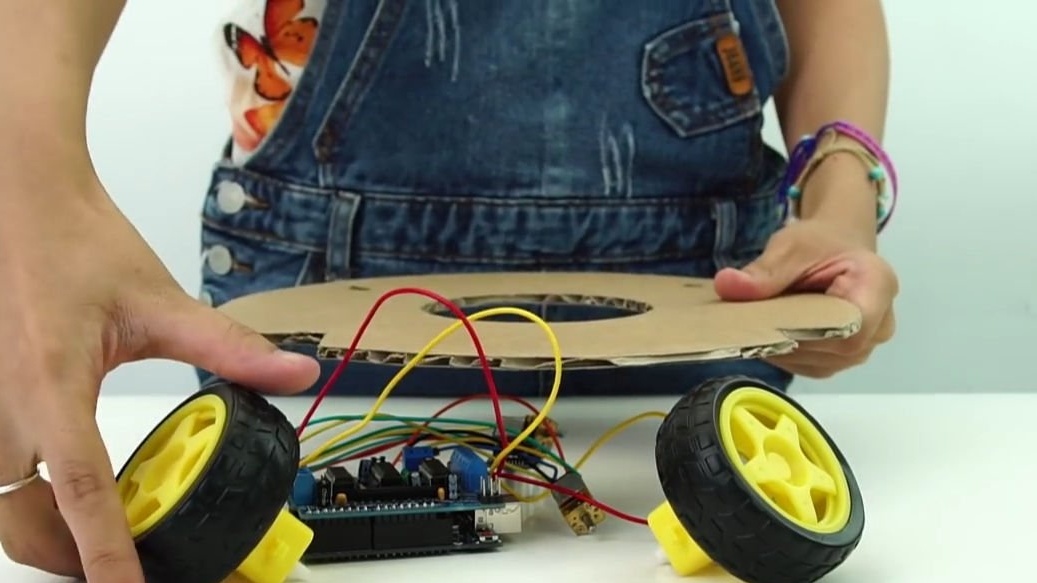
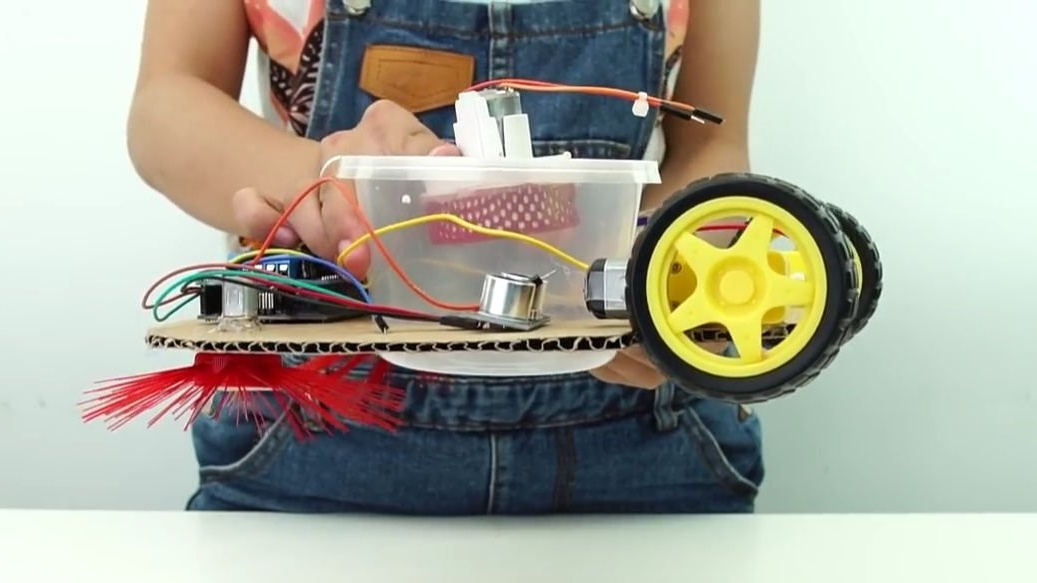
Pegue o todo eletrônica e coloque-o em um círculo de papelão feito anteriormente. Inserimos pequenos motores nos orifícios retangulares e fixamos o restante dos componentes eletrônicos ao adesivo hot-melt, conectamos grandes motores de engrenagem paralelamente à traseira e não tocamos no telêmetro ultrassônico:

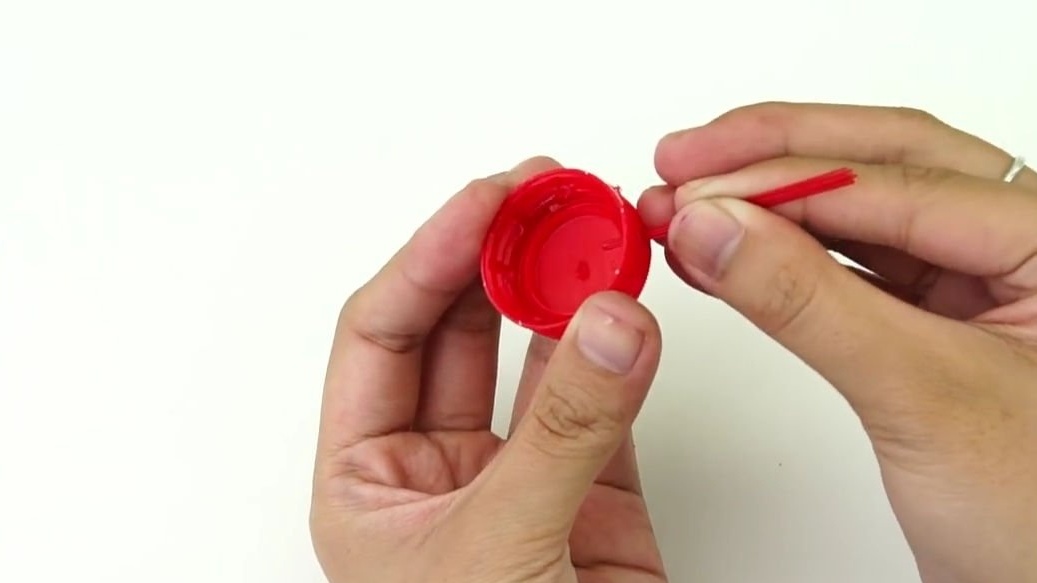
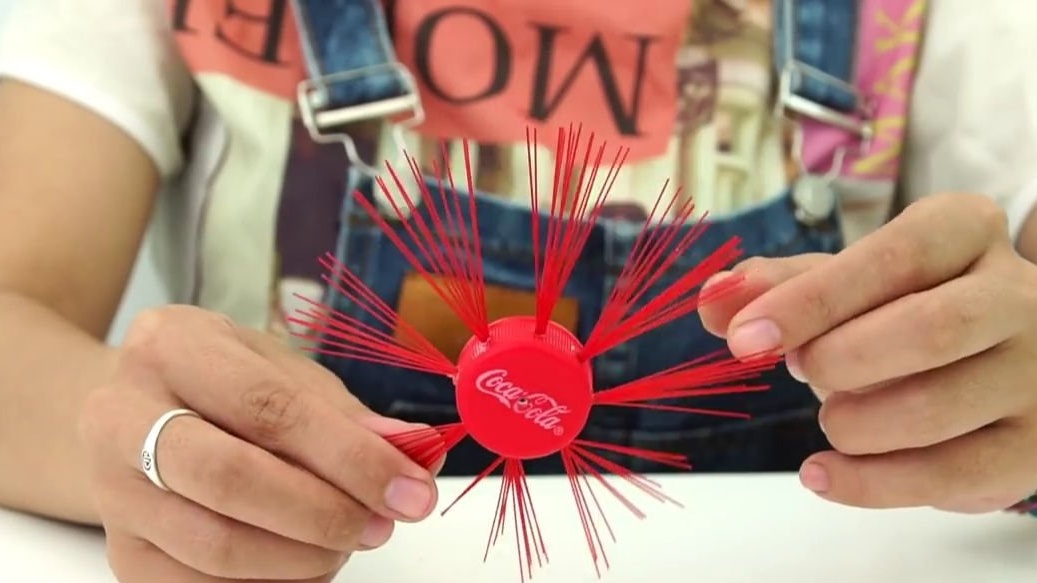
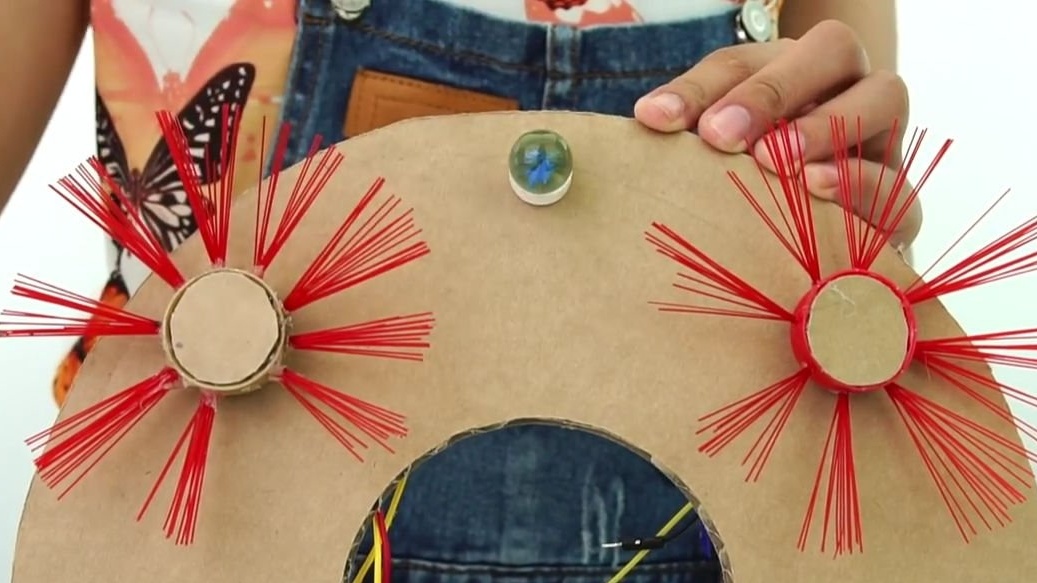
Nós removemos as tampas das garrafas de plástico, precisamos de apenas duas peças. Usando um ferro de solda, uma unha quente ou um furador, fazemos furos: um no centro da tampa e outro nos lados com um recuo de cerca de 1 cm. Nos furos laterais, tiramos as cerdas previamente preparadas da vassoura, elas devem ter o mesmo tamanho. Consertamos essas cerdas com cola quente. No total, dois desses espaços em branco devem ser feitos.
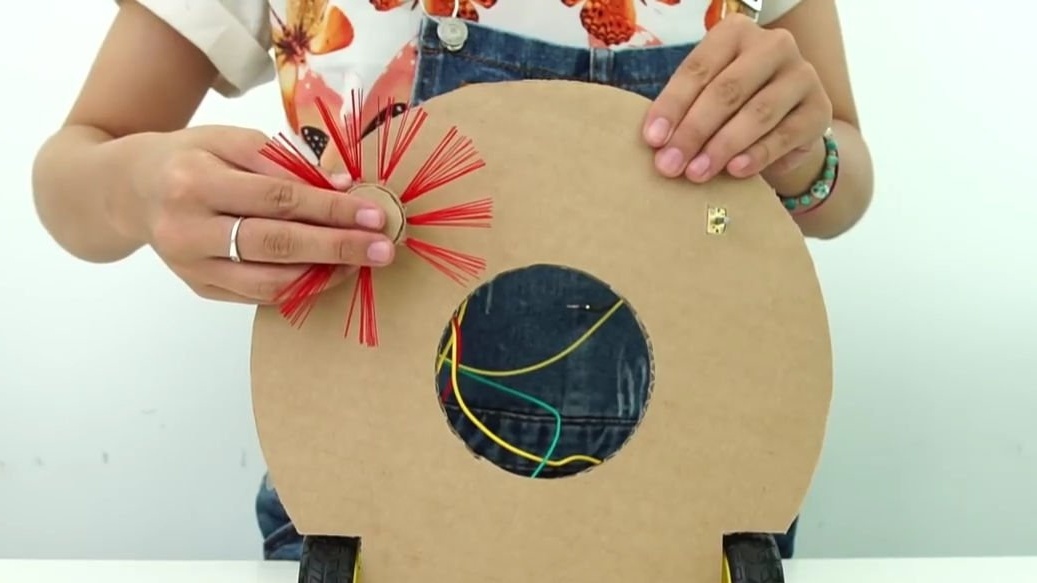
Nós os colamos no eixo de pequenos motores, localizados em um círculo de papelão. Colamos novamente com cola quente:



Na frente, entre duas escovas, cole uma pequena bola ou uma pequena roda que possa girar em torno de seu eixo:
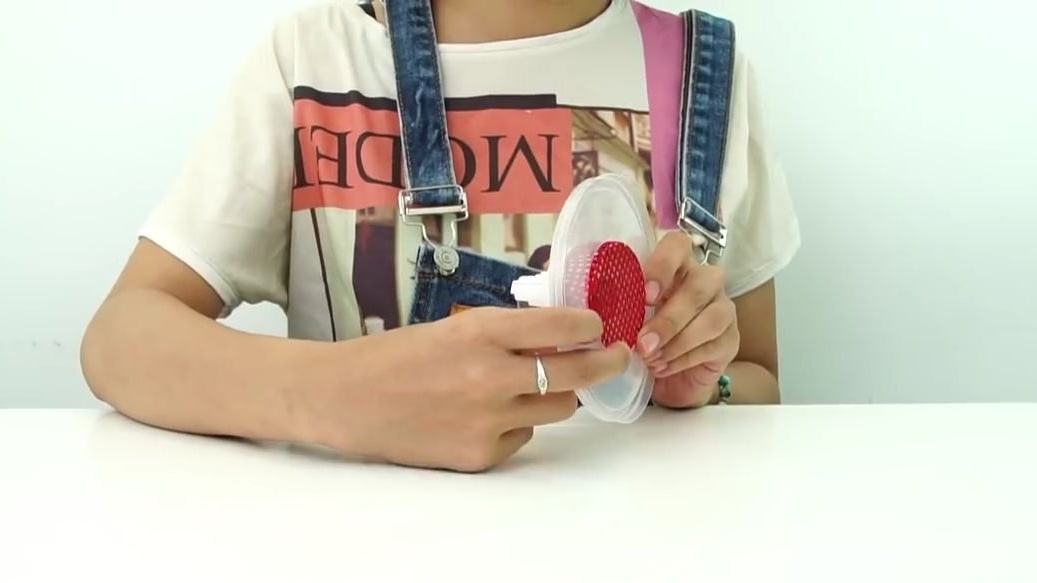
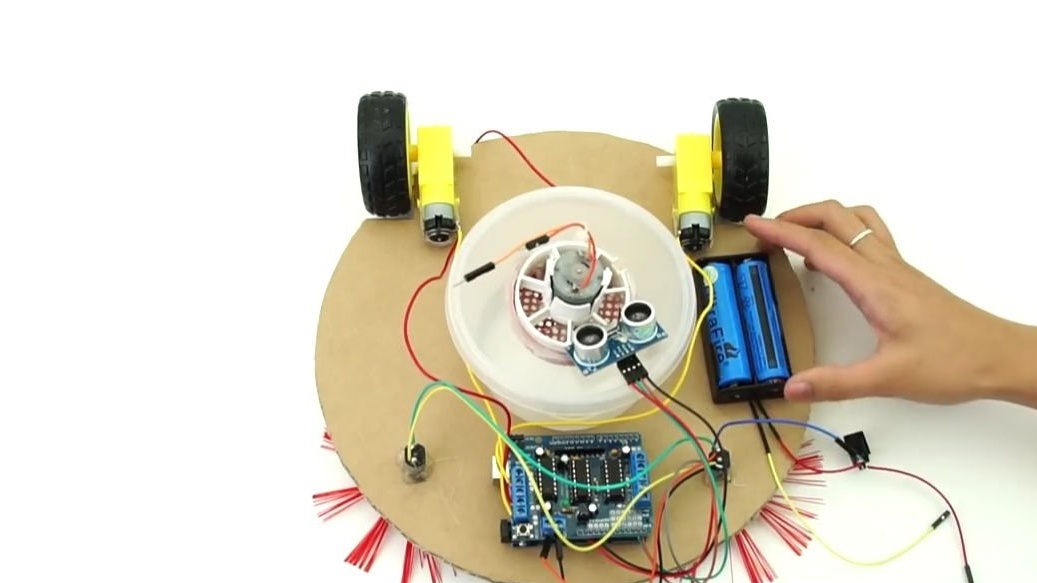
Agora precisamos de um motor elétrico com uma turbina que possa aspirar o ar e, em geral, um resfriador muito poderoso pode surgir. Colocamos e consertamos uma malha de plástico na parte frontal da turbina, é necessário proteger a turbina, ou seja, para impedir que detritos grandes entrem e filtrem. Retire a tampa do recipiente de plástico. O recipiente deve preferencialmente ter uma forma redonda. Na tampa, fazemos um furo redondo e uniforme no qual é necessário inserir e colar a turbina com uma malha. No próprio contêiner, fazemos um pequeno orifício retangular com a borda. Colocamos a tampa com a turbina no recipiente e pronto. A parte de sucção do robô está concluída. Quero lembrá-lo de que tudo deve ser feito conforme mostrado na foto abaixo:



Pegamos a base do robô e instalamos um contêiner com uma turbina no orifício central e colamos tudo firmemente com cola quente. Em seguida, na lateral da estrutura, instalamos uma caixa com 18650 baterias e um interruptor conectado a um dos fios provenientes da caixa. Conectamos novos fios para alimentar o Arduino, fazemos cortes de cabelo finais e podemos continuar.
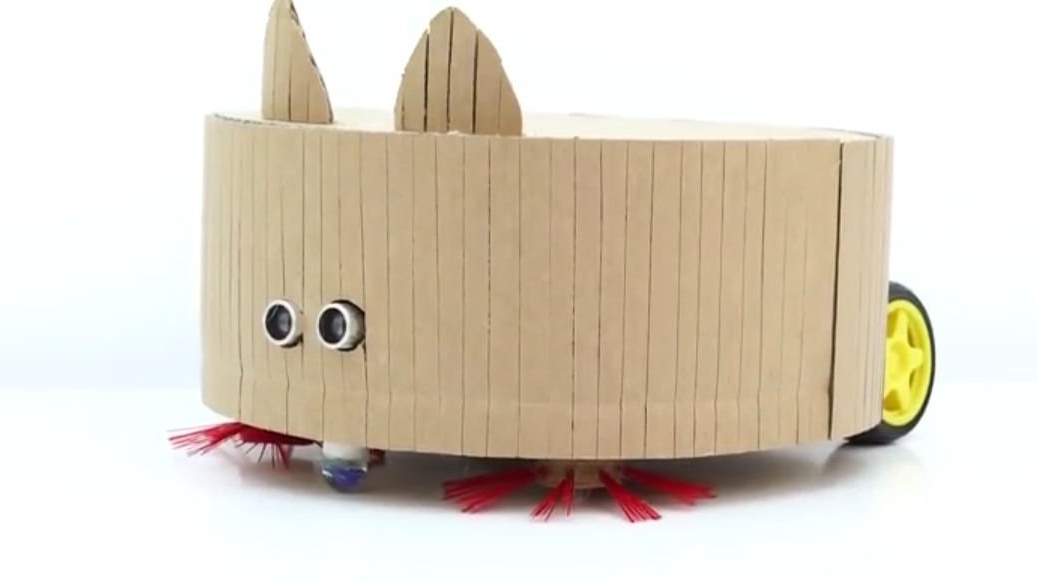
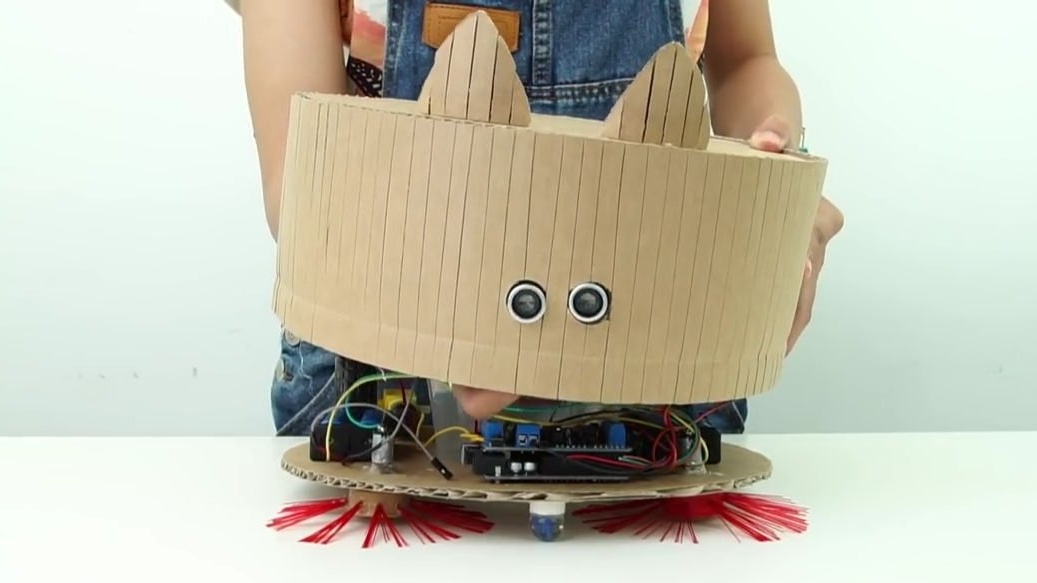
Inserimos o telêmetro ultrassônico em furos especiais que precisam ser feitos com antecedência no corpo do robô. Este edifício, como você deve se lembrar, foi construído no início. O autor do artigo também adicionou elementos decorativos em forma de orelhas, e um telêmetro ultrassônico aparece no lugar dos olhos, tudo isso parece muito bom. Colocamos o estojo sobre a base da estrutura e o consertamos, mas não muito, porque, nesse caso, você precisará obter as baterias para carregar.Obviamente, você pode instalar um modelo para carregar baterias diretamente no robô, mas é improvável que substitua o carregamento de alta qualidade.
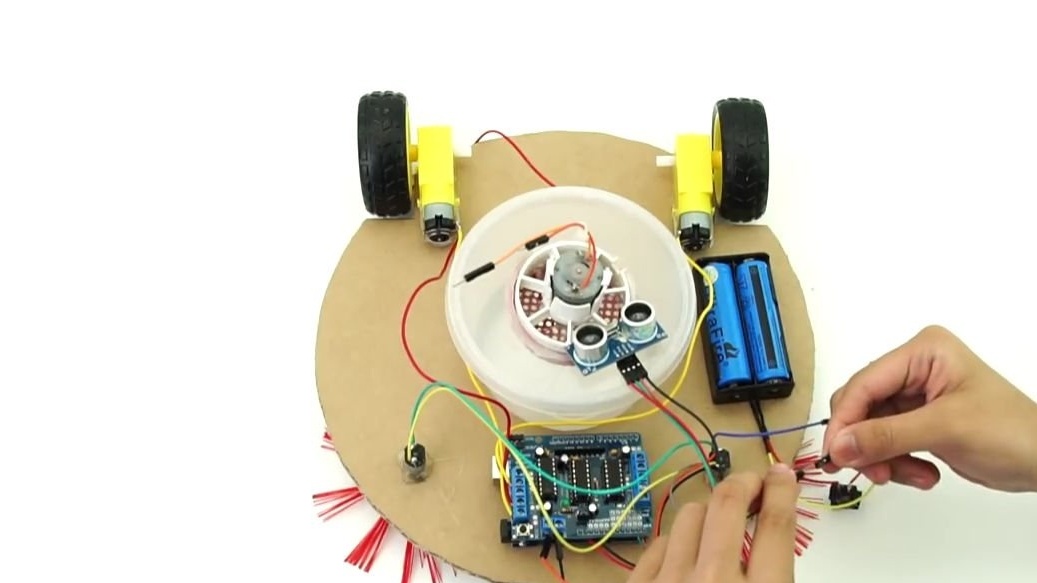

Resta apenas fazer o upload do firmware para o Arduino; em geral, é melhor fazer isso depois de conectar todos os componentes eletrônicos para verificar o circuito e o código, mas você pode fazer isso mais tarde. É melhor escrever um esboço para despejar no Arduino, mas você pode simplesmente encontrar na Internet um esboço pronto para robôs com um sensor ultrassônico que contorna um obstáculo, o benefício de tais esboços agora está completo. Mas, para evitar várias armadilhas, é melhor escrever de forma independente para si mesmo.
Bem, é isso! Um aspirador de pó robô simples e funcional está pronto e resta apenas testá-lo! Para fazer isso, basta ligá-lo e começar a andar no chão e aspirar todo o lixo. O robô se move e gira quando o obstáculo se aproxima, e isso é muito mais conveniente que os modelos anteriores.



Aqui está um vídeo do autor com uma montagem detalhada e testes caseiros:
Você também pode alimentar esse robô de um banco poderoso. Você pode ver minha análise detalhada de uma boa, é claro, quem estará interessado nisso:
Bem, todos boa sorte em projetos futuros, amigos!