







O principal conceito deste projeto é que, com a ajuda de várias ondas cerebrais, o usuário poderá controlar o robô, o cursor no PC ou ligar / desligar as luzes da casa, enquanto o microcontrolador (Particle Photon) cria uma análise on-line das ondas cerebrais do usuário. Então sim, com este dispositivo você pode realmente usar o Poder do Pensamento
 ... Este dispositivo não se destina apenas a preguiçosos ou fãs, foi criado para dar às pessoas a oportunidade. que lutam todos os dias com sua deficiência. O robôdesenvolvido pelo autor funciona como um sistema de cadeira de rodas casa a automação ajudará o usuário a controlar a luz ou a televisão, mesmo que ele não possa se mover. O modo de controlador de PC pode ser útil mesmo para aqueles que são completamente saudáveis.
... Este dispositivo não se destina apenas a preguiçosos ou fãs, foi criado para dar às pessoas a oportunidade. que lutam todos os dias com sua deficiência. O robôdesenvolvido pelo autor funciona como um sistema de cadeira de rodas casa a automação ajudará o usuário a controlar a luz ou a televisão, mesmo que ele não possa se mover. O modo de controlador de PC pode ser útil mesmo para aqueles que são completamente saudáveis. Como isso funciona?
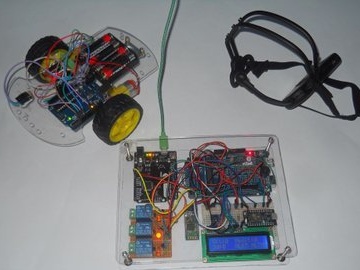

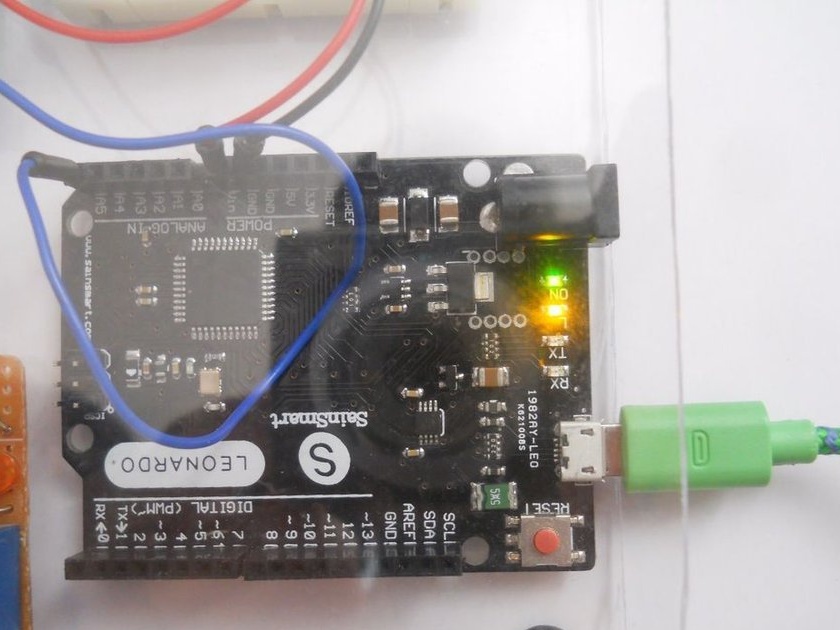
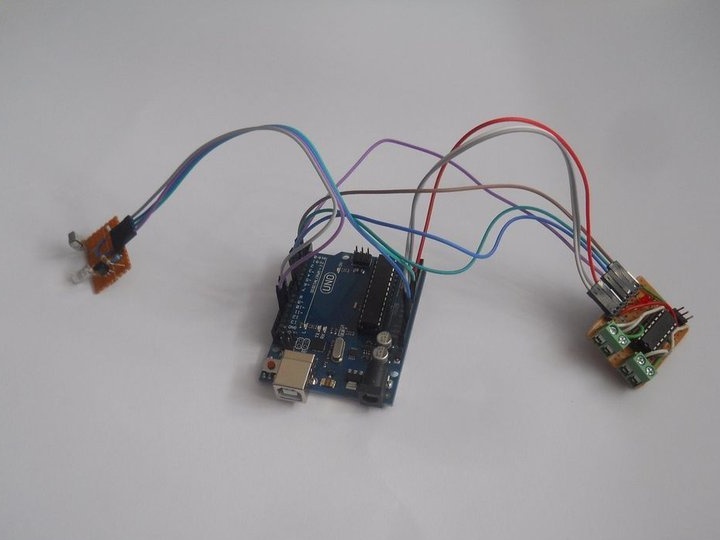
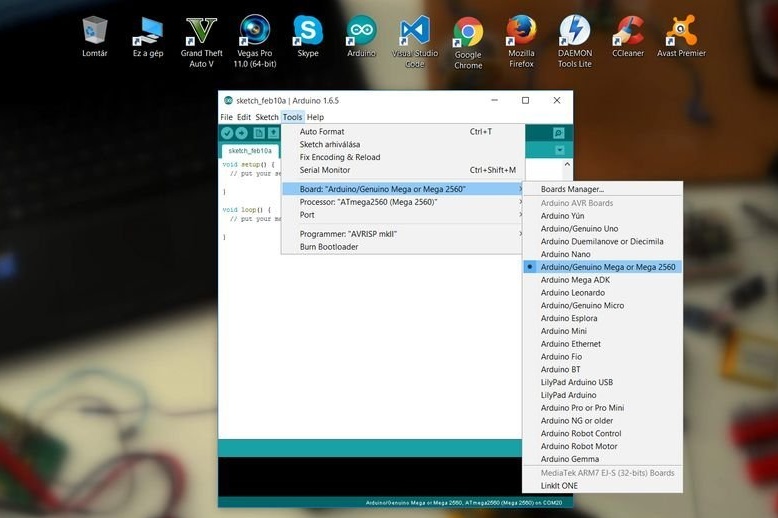
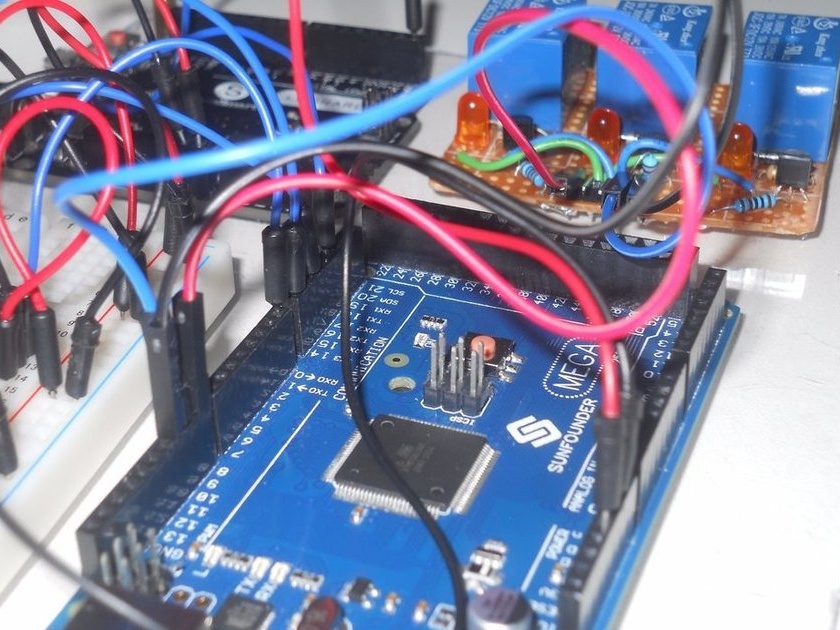
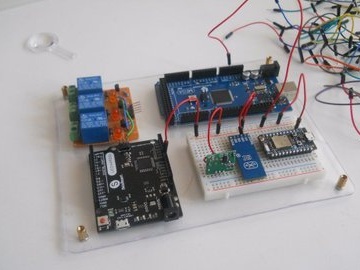
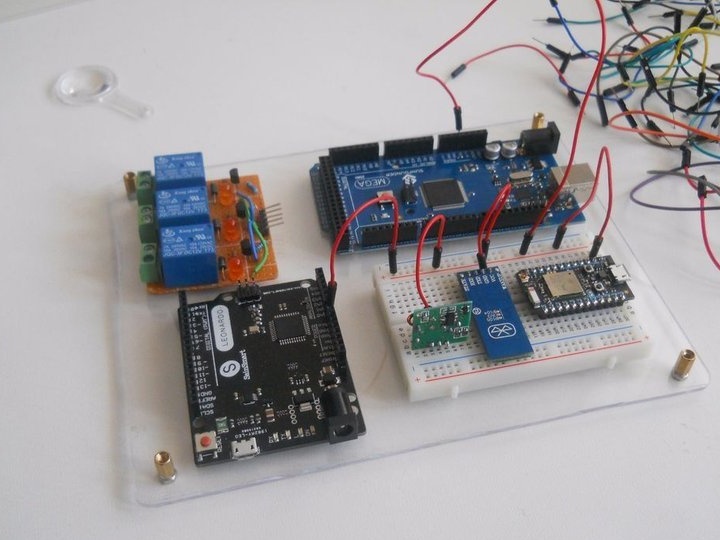
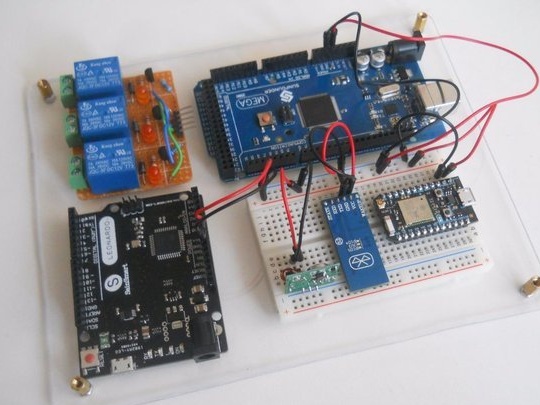
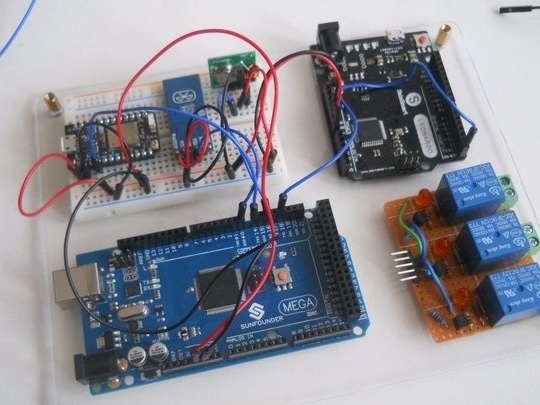
Quatro microcontroladores foram usados para dar vida a este projeto: Arduino Mega, Arduino Leonardo, UNO e Particle Photon. Mega é o cérebro do projeto, que recebe sinais do fone de ouvido, analisa e envia comandos para outros dispositivos. Passa todos os dados para o Particle Photon, que cria um servidor web. O Leonardo controla o mouse em um PC e o Uno é usado para receber IR (sinais infravermelhos) e controlar o robô. Um dispositivo é capaz de controlar três dispositivos diferentes (ou mais, se você quiser programar outra coisa). Além disso, esses três dispositivos diferentes serão chamados de canais. O dispositivo alterna entre esses canais se você fechar os olhos:
Feche os olhos por 1-2 segundos: mude para a função de automação residencial
Feche os olhos por 2-4 segundos: alterne para o modo de controle do robô
Feche os olhos por 1 a 6 segundos: alterna para o modo de controle do mouse
Para tornar a função de automação residencial, à qual você pode conectar qualquer coisa: uma TV, lâmpadas, soquetes, o que você quiser, relés foram usados
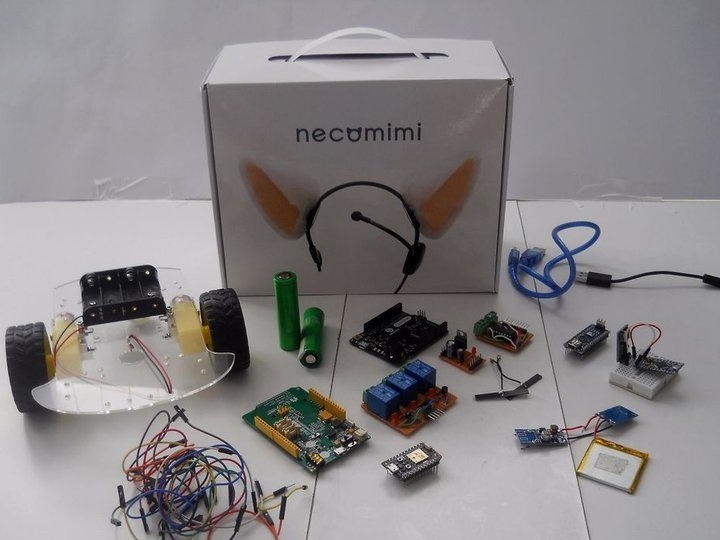
Para a percepção das ondas cerebrais - Necomimi, que pode mover seus ouvidos dependendo das ondas cerebrais (atenção, meditação). Dentro de um pequeno chip que lê as ondas cerebrais, filtra o ruído e dá um sinal muito bom. Funciona com a interface UART (Serial), portanto, com alguns hackers, podemos usar o Arduino para ler ondas cerebrais.O papel desse fone de ouvido é transmitir ondas cerebrais sem fio para um servidor central.
Se você já está familiarizado com projeto anteriorentão você pode pular a fase de desmontagem e remodelação da Necomimi.
Desça para ver como desmontar e criar um fone de ouvido Bluetooth sem fio.
Sistema de controle de automação residencial
Se você alternar para o modo de automação residencial, aumente o nível de atenção acima de 70 para ligar o primeiro relé, aumente o nível de meditação acima de 70 para ligar o segundo relé e aumente os dois valores acima de 70 para ligar o terceiro relé. É um pouco difícil, mas não impossível, após algum treinamento da mente. Se o relé já estiver ligado, use o mesmo comando para desligá-lo (se estiver ligado, alcance 70 para desligá-lo). Quando o sistema estiver pronto, qualquer dispositivo de alta tensão (luz, TV, computador, ventilador, qualquer coisa) pode ser conectado ao módulo de relé.
Controle do mouse
O cursor é controlado por emoções. Se o nível de atenção for menor que 25, ele se move para a esquerda, se entre 25 e 50 se move para a direita, se entre 50 e 75 sobe e se entre 75 e 100 desce. Você pode emitir um clique no botão do mouse aumentando o nível de meditação. Claro, você precisa treinar para isso.
Controle de robô
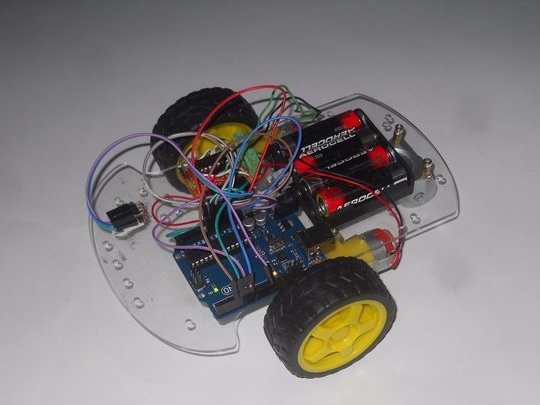
O robô tem apenas três equipes diferentes: pare, vire à esquerda e siga em frente. Por que apenas duas opções de movimento? Porque essas duas direções são suficientes para mover o robô para qualquer lugar. Use seu nível de meditação para girar com o robô e, quando tiver atingido a direção que deseja mover, pare o robô e, em seguida, avance com o nível de atenção. Essa é a melhor maneira de controlar o robô, e mesmo os iniciantes que não conseguem controlar seus valores de atenção / meditação podem brincar com ele.
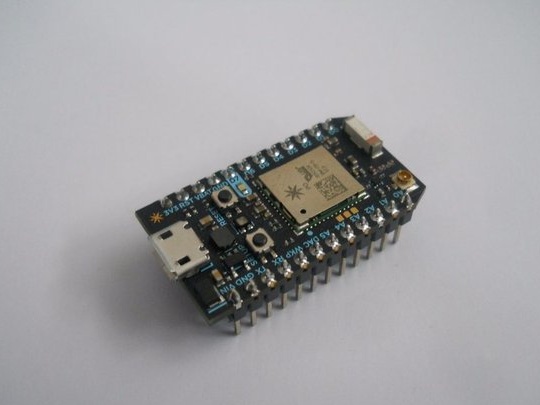
O fone de ouvido transmite sinais BT (Bluetooth) para o Arduino Mega, que analisa os bytes recebidos e, dependendo dos pensamentos do usuário, controla várias funções. A princípio, o autor queria usar o Particle Photon como transmissor de dados, mas esse pequeno módulo teve um papel na criação de um servidor da web. Foi a maior modificação em todo o projeto. Ele também usou módulos caseiros do Arduino, mas você pode comprá-los online.
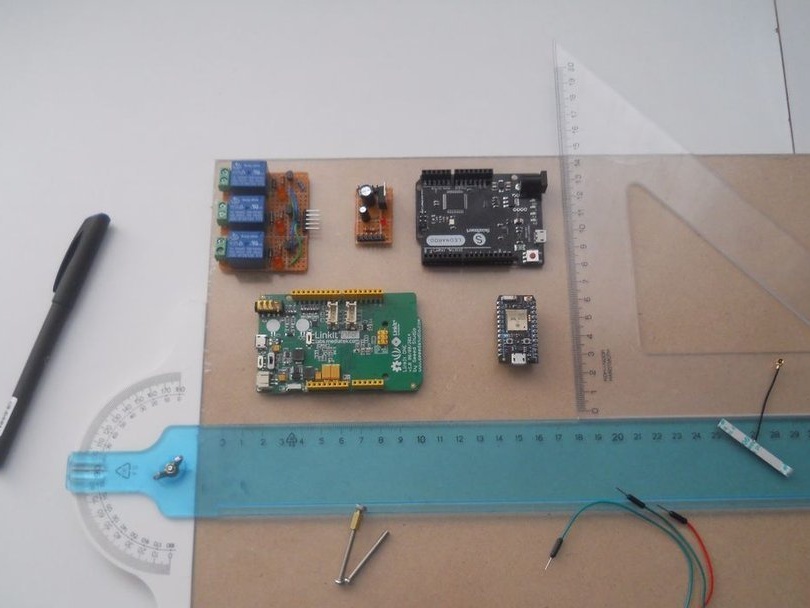
Todas as peças são da GearBest.com. Esta é uma loja online, igual à do eBay, mas as peças de reposição são entregues muito mais rapidamente (talvez tudo isso esteja no aliexpress). Portanto, se você deseja criar seu próprio controlador de jogo, controlador de robô ou Force Detecto, comece comprando peças.






Ferramentas necessárias:
ferro de solda
solda
pistola de cola
fita autoadesiva / fita dupla face
descascador de fios
cortadores de fio
Equipamento
/ Arduino Nano
Software:
Hacking Necomimi







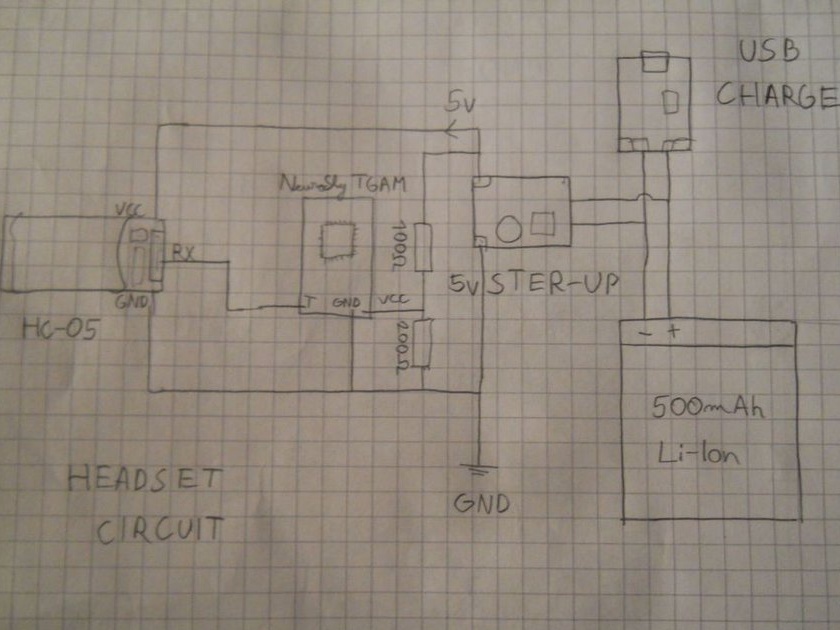
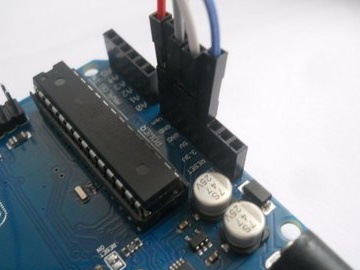
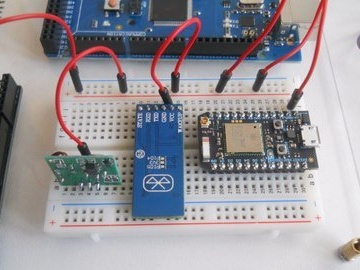
Queremos modificar este brinquedo EEG para transferência de dados via Bluetooth, então primeiro desmontaremos o gabinete. Os parafusos estão sob o adesivo. Remova o adesivo e a parte traseira do dispositivo e você encontrará pequenas pranchas dentro. O da placa principal é o chip Neurosky TGAM. 4 fios da placa principal do microcontrolador são soldados a ele; portanto, pegue um ferro de soldar e remova cuidadosamente este circuito. Agora solde os três fios ao pino GND, ao pino VCC e ao pino T. Um pino-T é uma saída de transmissor com uma velocidade de 57600 baud, que envia pacotes de dados ao nosso microcontrolador. Depois de soldar os três fios acima, você poderá construir sua própria fonte de energia recarregável. O autor usa uma bateria de íon de lítio de 500 mAh, um circuito de carregador USB, um circuito de reforço de 5 V e dois resistores (100 Ohms e 200 Ohms) para fornecer uma fonte de alimentação separada de 3,4 V para o chip e o módulo Bluetooth. Na foto, o diagrama de conexão.
Se o circuito estiver pronto, configure o módulo Bluetooth.
Siga as instruções e figuras abaixo e crie seu próprio fone de ouvido EEG sem fio.
A parte mais importante é conectar o pino “T” ao “RX” no módulo Bluetooth.



HC-06: Primeiro carregue o esboço chamado “HC_06_Bluetooth” no Arduino UNO, depois conecte o módulo Bluetooth conforme mostrado no diagrama.
// HC-06-Bluetooth
configuração nula () {
// Inicie a série do hardware.
Serial.begin (9600); // taxa de transmissão padrão do HC-06
atraso (1000);
Serial.print ("AT");
atraso (1000);
Serial.print ("AT + VERSION");
atraso (1000);
Serial.print ("AT + PIN"); // para remover a senha
atraso (1000);
Serial.print ("AT + BAUD7"); // Defina a taxa de transmissão como 576000 - por exemplo, Necomimi dafault
atraso (1000);
Serial.begin (57600); //
atraso (1000);
}
loop vazio () {
}Abra o Serial Monitor no Arduino IDE e aguarde o Arduino configurar o módulo BT. O seu módulo Bluetooth está agora definido para 57600 baud. Você pode experimentar muitos aplicativos BCI (Brain Computer Interface) porque este brinquedo Necomimi hackeado será compatível com todos os aplicativos Neurosky.
Você pode usar esses aplicativos para aprender a controlar suas ondas cerebrais.
HC-05: Em seguida, use “HC_05_Bluetooth” e carregue o seu Arduino da mesma maneira que antes.
// HC-06-Bluetooth
void setup () {
// Inicie a série do hardware.
Serial.begin (9600); // taxa de transmissão padrão do HC-05
atraso (1000);
Serial.print ("AT");
atraso (1000);
Serial.print ("AT + VERSION");
atraso (1000);
Serial.println ("AT + ROLE = 1"); // define o HC-05 no modo master
atraso (1000);
Serial.println ("AT + LINK =" Insira seu endereço aqui "); // agora o módulo deve se conectar automaticamente
atraso (1000);
Serial.print ("AT + UART = 57600,1,0"); // Defina a taxa de transmissão como 576000
Serial.begin (57600); //
atraso (1000);
}
loop vazio () {}
Conecte o pino "EN" do HC-05 ao Arduino 3v3. Você deve escrever o endereço do seu módulo HC-06 no código. Verifique o endereço do módulo BT no seu smartphone Android. Substitua ":" (pontos duplos) por "," vírgulas no código.
E você deve alterar o endereço no código: 20: 15: 09: 15: 17: 82 = 2015.09.151782 Assim, o módulo HC-05 pode reconhecer o endereço.
Controle remoto
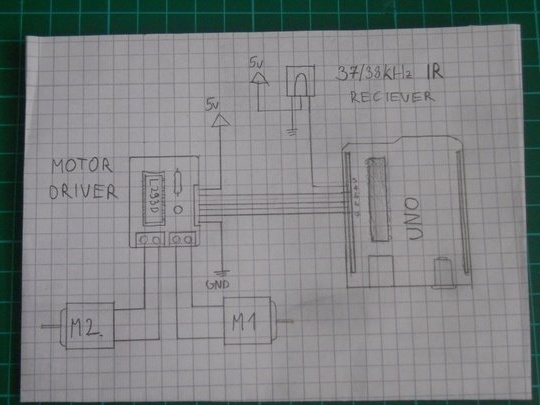
Para criar esse robô barato, foi usado um sensor infravermelho de 38 kHz, usado nos controles remotos da televisão.
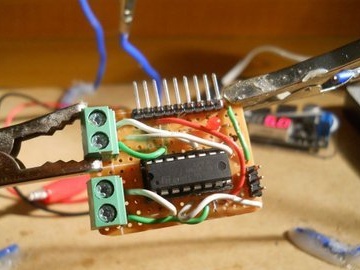
Motorista
Diagrama de acionamento do motor - Você precisará dos seguintes detalhes:
2 terminais de parafuso
L293D IC3
Pino do cabeçalho (90 graus)
Resistor 1k
LED vermelho
Fios
Placa de circuito
Usando vários fios de cobre e, seguindo o diagrama, conecte os pinos do microcircuito aos pinos do conector. Não importa qual perna do microcircuito a qual pino do conector, lembre-se de onde você os conectou. O LED é conectado em série com o resistor e em paralelo com 5 V VCC.
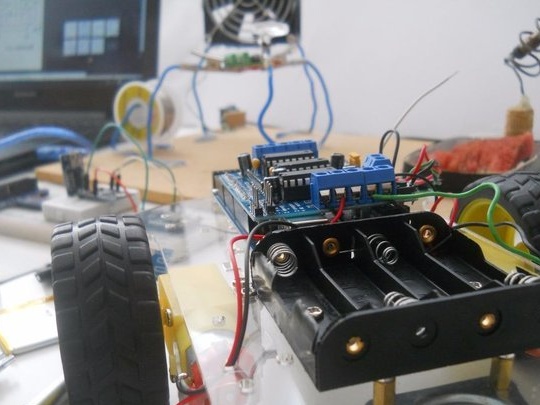
montagem de chassi
Como motorista de motor elétrico, é usado o chip L293D, que pode controlar dois motores. Veja o diagrama para criar o diagrama.
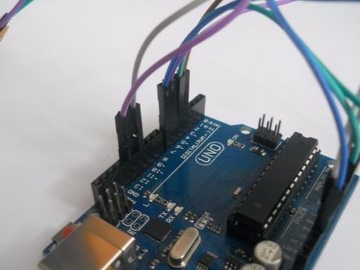
Conectar peças ao Arduino
Pin do Arduino == & gt; motorista do motor
4 == & gt; 15
5 == & gt; 10
6 == & gt; 7
7 == & gt; 2
VIN == & gt; 85v == & gt; 1, 9, 16
GND == & gt; 4, 5, 13, 12
Portanto, observe o diagrama de circuitos do módulo L293D e conecte seus contatos ao Arduino UNO, conforme descrito acima. Pino 5v O Arduino deve ser conectado aos pinos 1, 9, 16 para ativar a função de controle do motor do chip. Finalmente, use os terminais de parafuso para ligar os motores.
A biblioteca usa o IRremote, um código que lê sinais infravermelhos de 38 kHz, decodifica-os e move o robô. (Faça o download da biblioteca na seção "software").
Existem comentários no código, mas o resultado final é que ele decodifica os sinais infravermelhos vindos do servidor principal e, dependendo do que o usuário deseja, liga os motores, após o que o robô avança ou vira à esquerda. Faça o download do código: "Robot_Code". Faça o download no seu Arduino e seu robô estará pronto.
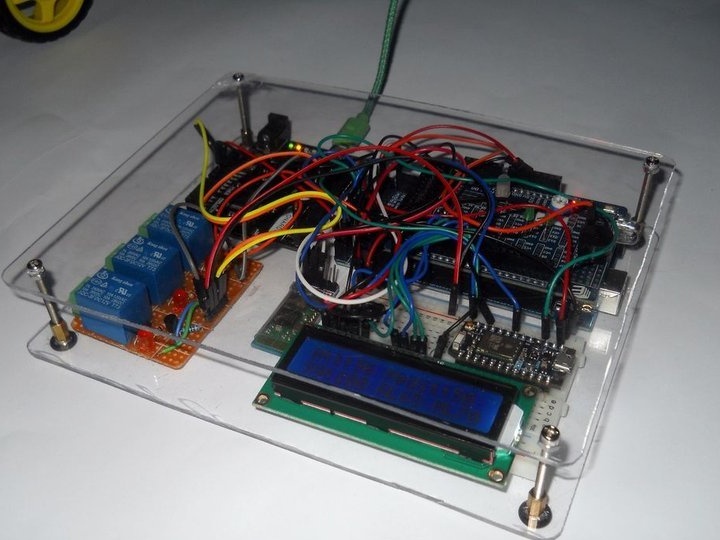
Servidor principal (Arduino Mega, Leonardo, Photon)




O servidor lê pacotes de dados recebidos do fone de ouvido sem fio. Usaremos o módulo BT configurado para fornecer comunicação entre o fone de ouvido e o servidor. O Arduino Mega é o cérebro de todo o circuito, tudo está conectado a este microcontrolador: Bluetooth, LED transmissor infravermelho, servidor web e controlador de mouse. O código é um pouco complicado, mas como regra, ele tem comentários para entender.
Habitação
Tudo é simples. Duas placas de acrílico de 18x15 cm, alise as bordas com uma lixa. Vários parafusos para conectá-los um ao outro.
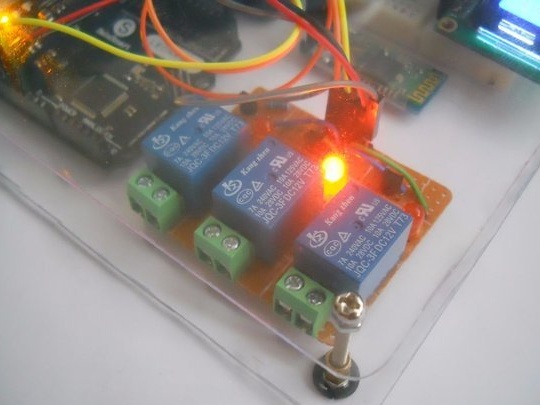
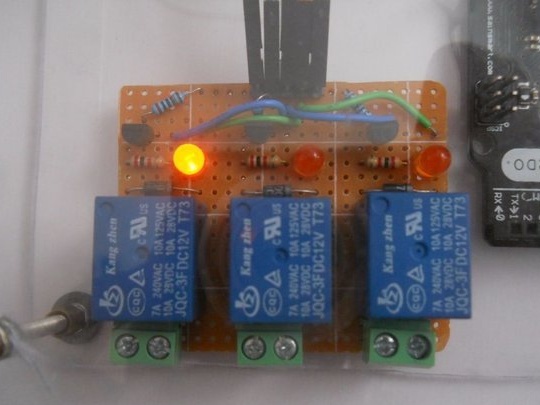
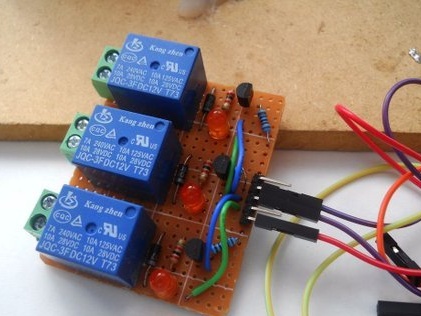
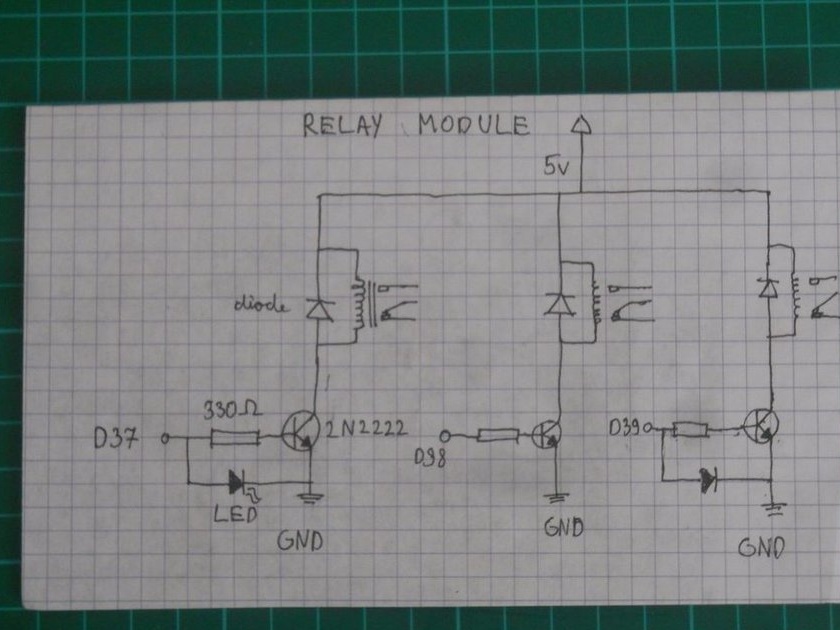
Placa de relé
Você precisará dos seguintes detalhes:
Transistor 2n2222 (3 peças)
diodos de germânio (3 peças)
Resistores de 330 ohm (3 unid.)
Resistores de 1 kOhm (3 unid.)
Relé 5 V (3 unid.)
conectores de pinos
Placa de circuito
Uma imagem vale mais que mil palavras; portanto, observe o diagrama de como conectar peças em uma placa de circuito impresso.
Se a saída “Signal” for de um Arduino, o relé será ativado. O transistor amplifica o sinal para fornecer energia suficiente para o relé. Usaremos 37-38-39 contatos para controlar os níveis ALTO BAIXO de cada relé.
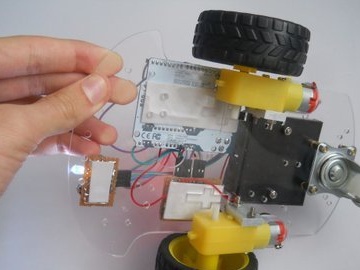
Para instalar peças em uma caixa de acrílico, o autor usou fita dupla face. Ele praticamente detém os detalhes.
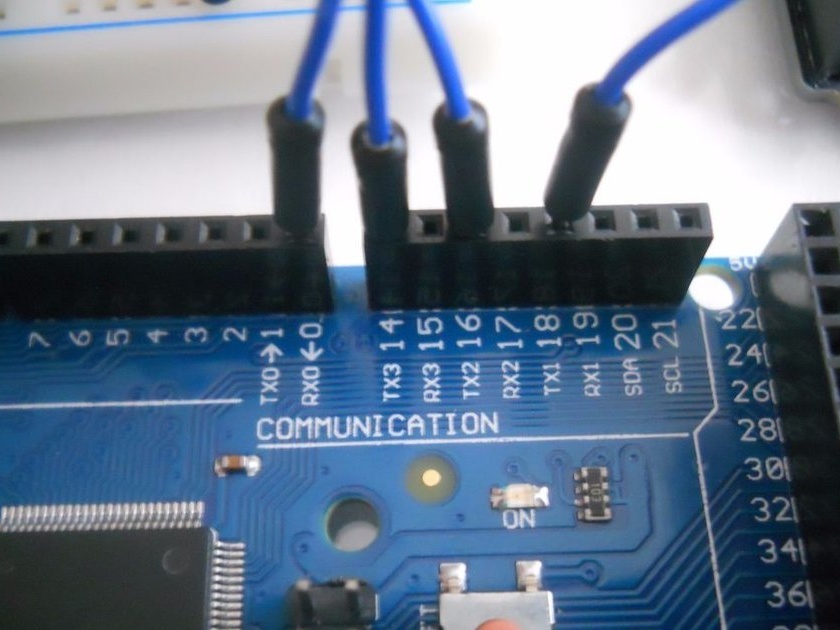
Este é um servidor de software, portanto, fazer um circuito não é tão difícil. Você só precisa ligar os microcontroladores e estabelecer uma conexão entre eles. O LED IR está conectado ao pino D3 e o relé está conectado ao 37-38-39. O D16 Arduino Mega vai para o RX Photon e o D18 para o RX Leonardo.
Conexão do robô
[2.02 Kb] (downloads: 14)
Mas agora o código está pronto e funcionando, então você só precisa baixar seus microcontroladores. Faça o download do arquivo .ino ou copie / cole o código no seu IDE e use-o. O código do Particle Photon deve ser baixado via IDE do navegador. Para fazer isso, registre-se em. E conecte seu laptop ao microcontrolador.Tudo acontece quase automaticamente, basta adicionar o ID do seu dispositivo.
Antes de baixar os códigos, verifique se nada está conectado aos pinos RX / TX. Portanto, desconecte seu módulo Bluetooth do Mega e desconecte o Mega do Leonardo e do Photon.
[489 b] (downloads: 15)

Servidor WebPara adicionar a função IoT (Internet das Coisas) ao seu projeto, o autor criou um registrador de dados on-line usando o Particle Photon. Dependendo do que você faz com o dispositivo, o Photon cria um servidor pessoal e grava dados na nuvem.Isso pode parecer intimidador a princípio, mas imagine que você possa determinar se está estressado (os níveis de atenção aumentam e diminuem rapidamente) ou vale a pena ir dormir
(o nível de meditação está sempre acima de 80)
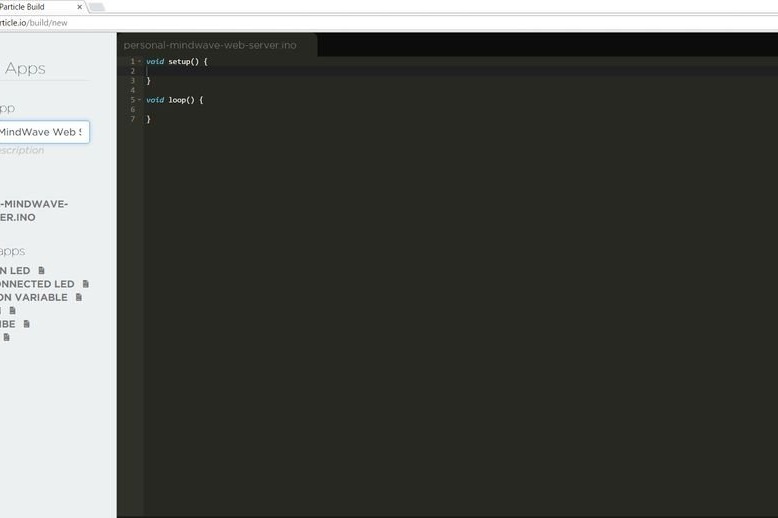
. Este servidor da Web pode ajudá-lo a viver de maneira mais saudável.
Codificação do Navegador
O Particle também possui um painel on-line onde você pode publicar quaisquer dados usando "Particle.publish ();" sintaxe. Os desenvolvedores da barra de ferramentas economizam muito tempo para os usuários.
