

Hoje, o autor de Instructables sob o apelido Techgenie falou sobre onde eletrônica existe E ele trouxe um link para o primeiro, no qual não é - apenas um eletricista. É mais elegante e será discutido na minha tradução.
Se você ainda não quer ter um, assista ao vídeo e deseje este dispositivo para sua casa desde os primeiros segundos de visualização:
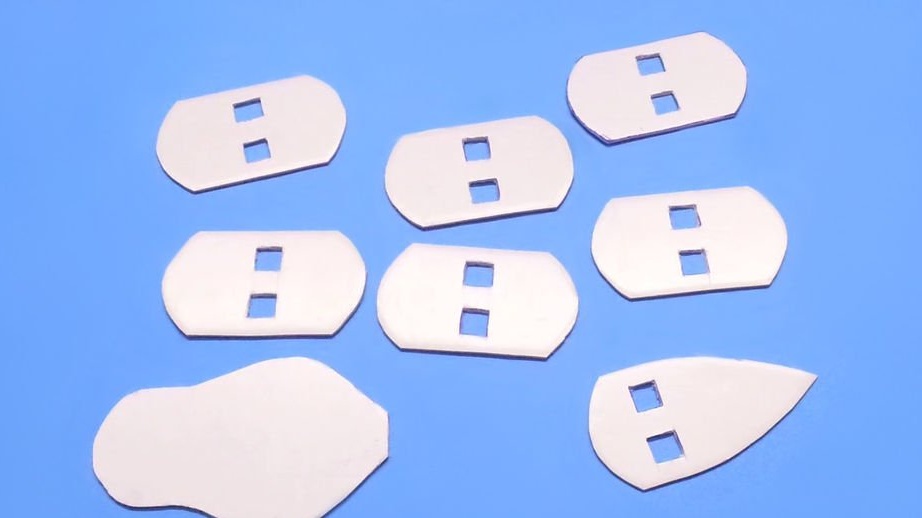
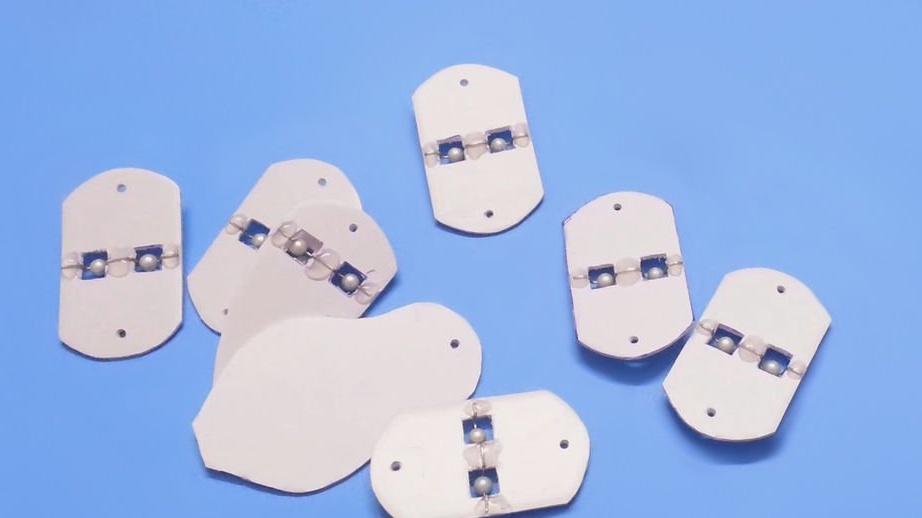
O mestre corta os elos da cobra robótica do papelão:
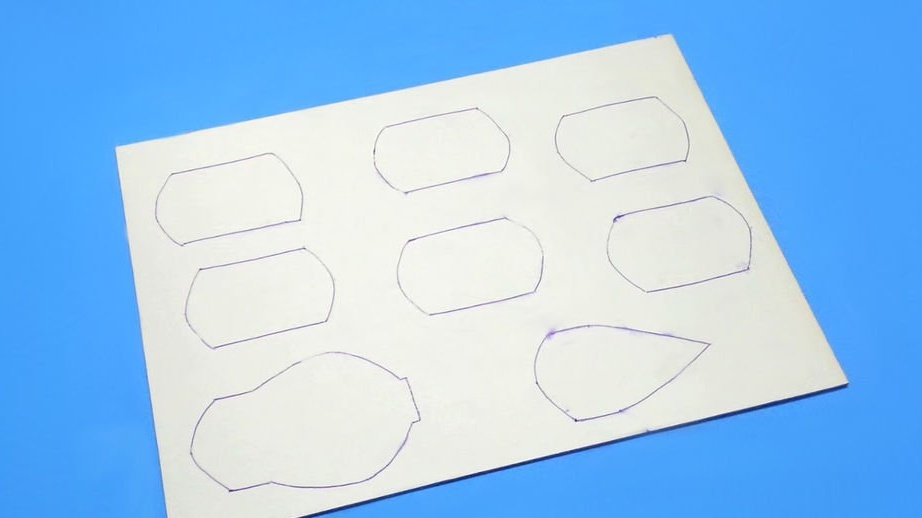
Extrai de uma planilha:

Faz furos quadrados para os rolos:
O que faz de contas e clipes de papel, saudações "DU Vasily Biletsky":
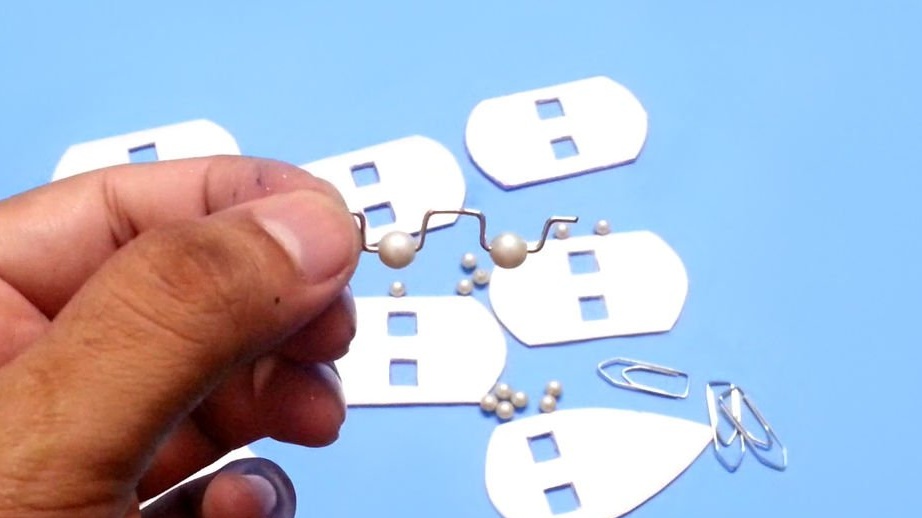
Fixa o eixo dos rolos com uma pistola de cola, certificando-se de que os rolos não estejam presos com cola. Faça furos para conectar os elos:
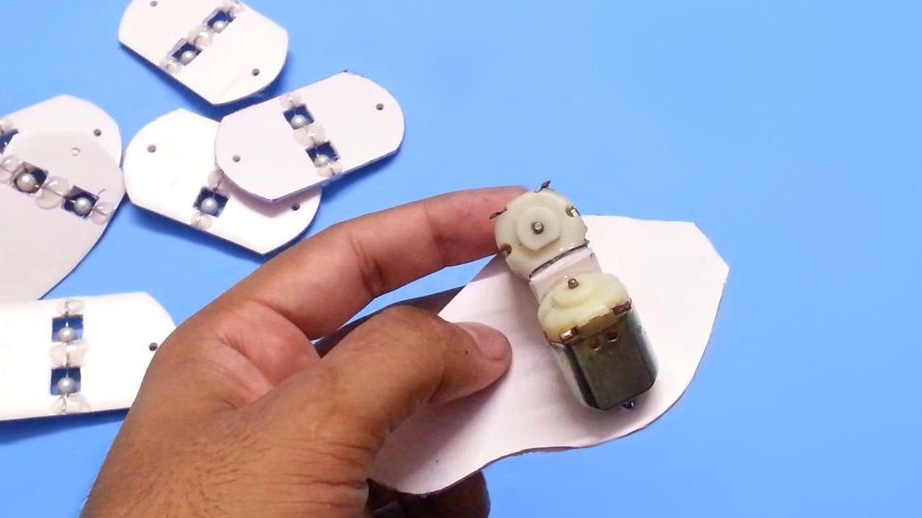
Adere um suporte triangular para motores de corrente contínua:

Aplica motores, observa onde fazer furos para eixos, brocas, eixos roscados, colas e motores:
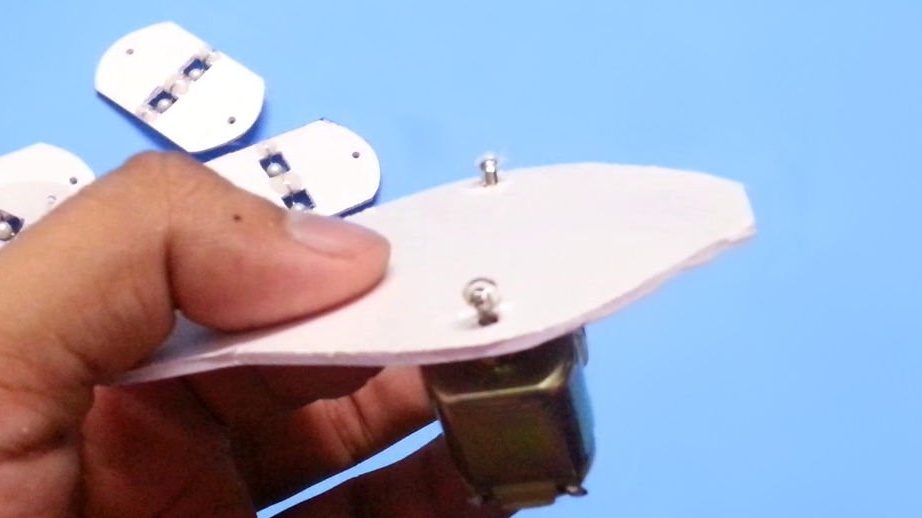
Nos eixos dos motores, produz-se bolas adesivas de fusão a quente:
Conecta links com ... fios e botões:
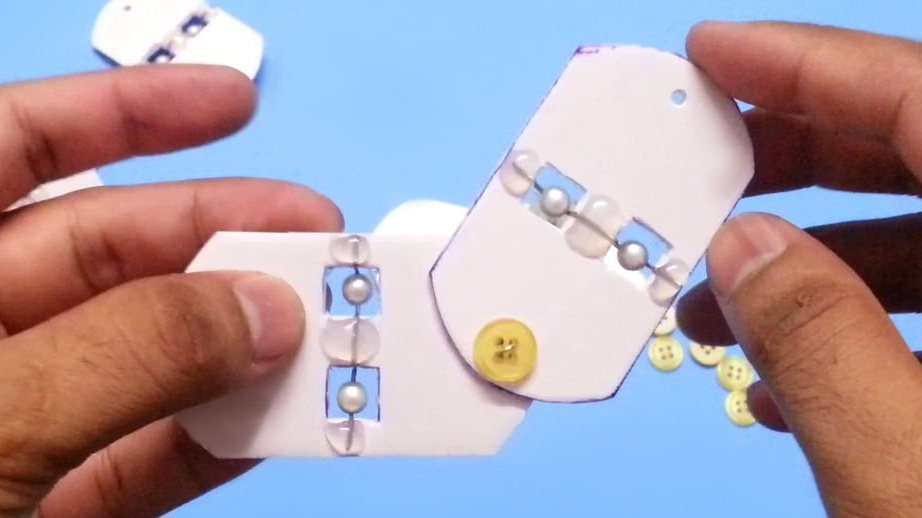
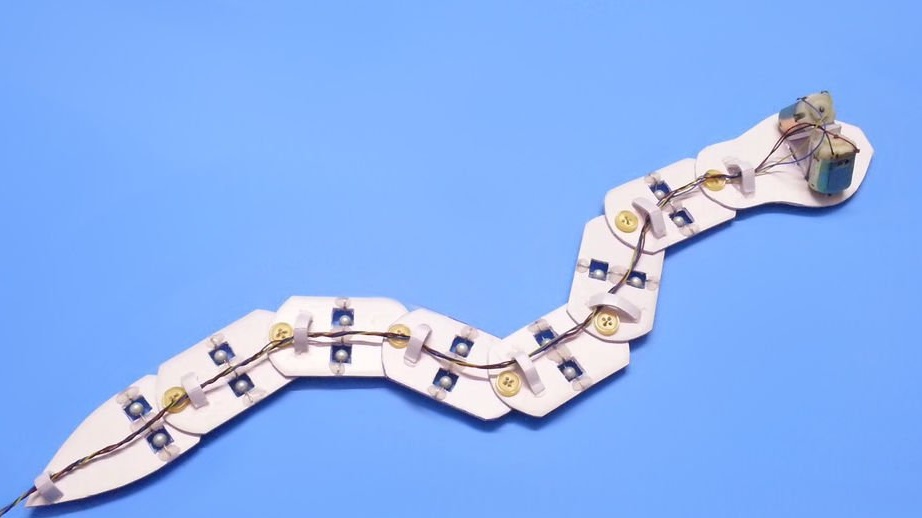
A cobra robótica está montada, mas ainda está imóvel:

Ele corta tiras de papelão, pega um cabo de quatro fios, solda dois fios em cada um dos motores, prende com a primeira tira:

E o resto:
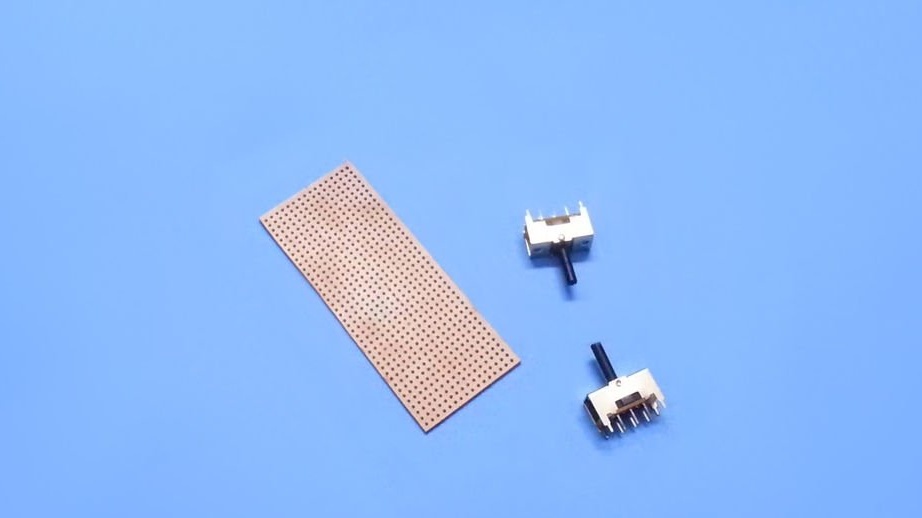
Leva dois interruptores para três posições (do meio para desligado) e duas direções, além de um pedaço de uma tábua de pão do tipo perfboard:
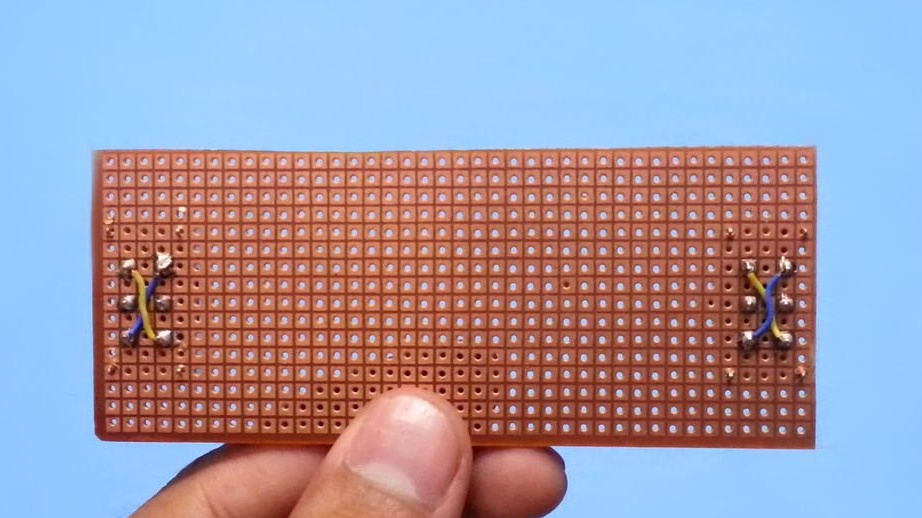
Usando jumpers, transforma os dois switches em reversíveis:
Ele faz molas para a bateria 18650 a partir de clipes de papel, coloca. Não faça isso! Pegue o compartimento acabado! Use a bateria apenas com proteção! Melhor ainda, um compartimento para 2 peças. AA ou AAA com pilhas ou baterias apropriadas.
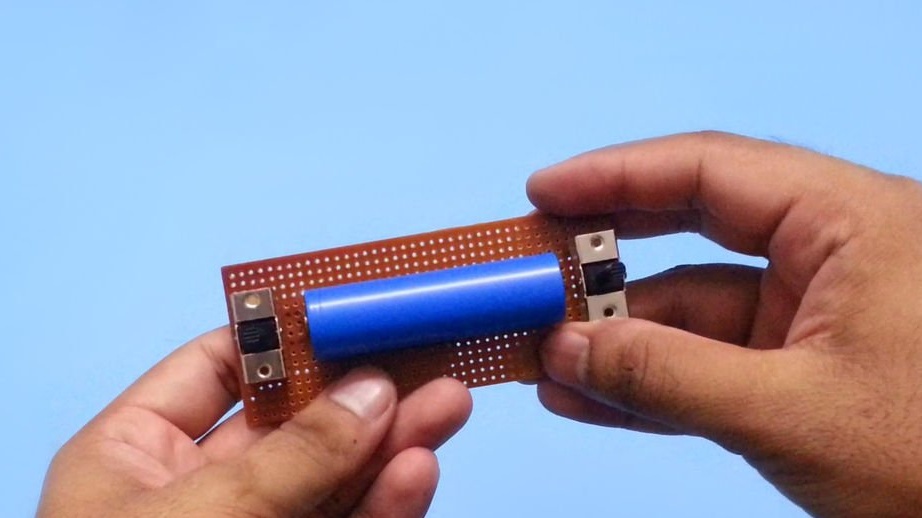
Grampos longitudinais contribuem para manter a bateria no lugar:
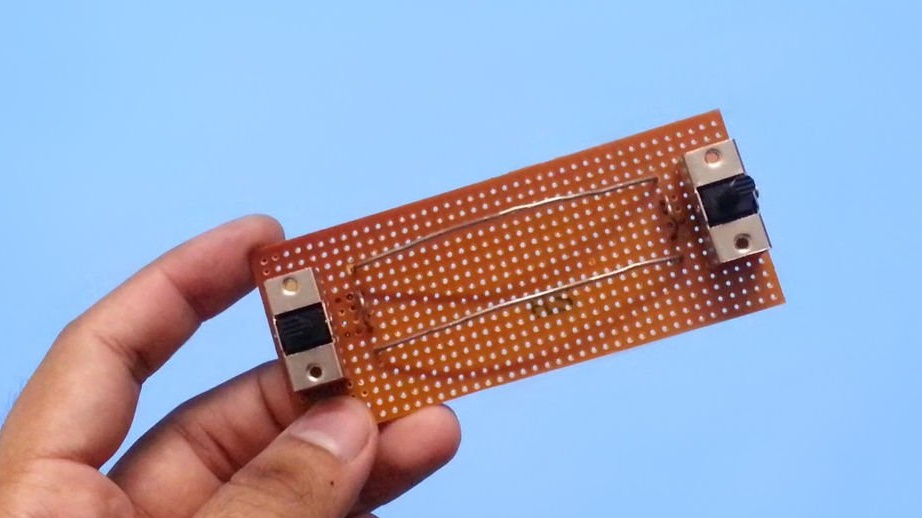
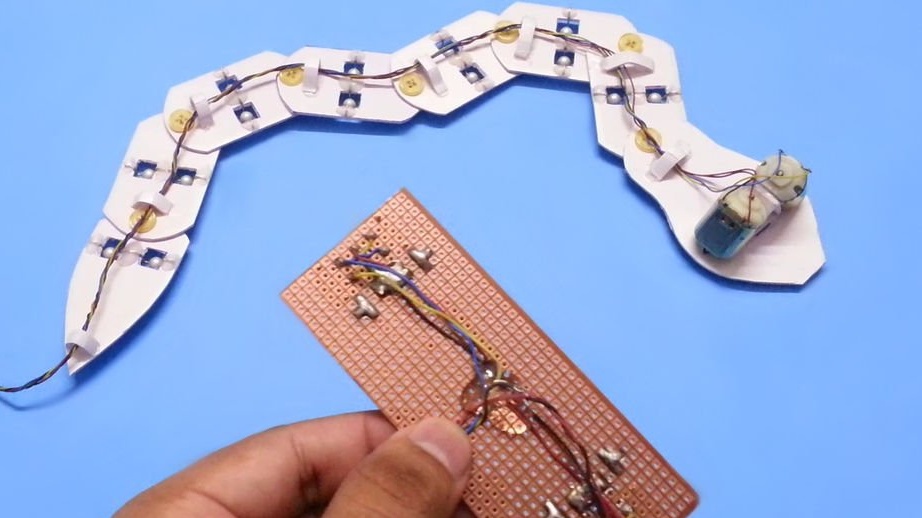
Portanto, enquanto a parte traseira do painel de controle remoto parece:
O mestre conecta o cabo da robosnake, faz conexões de acordo com o esquema:

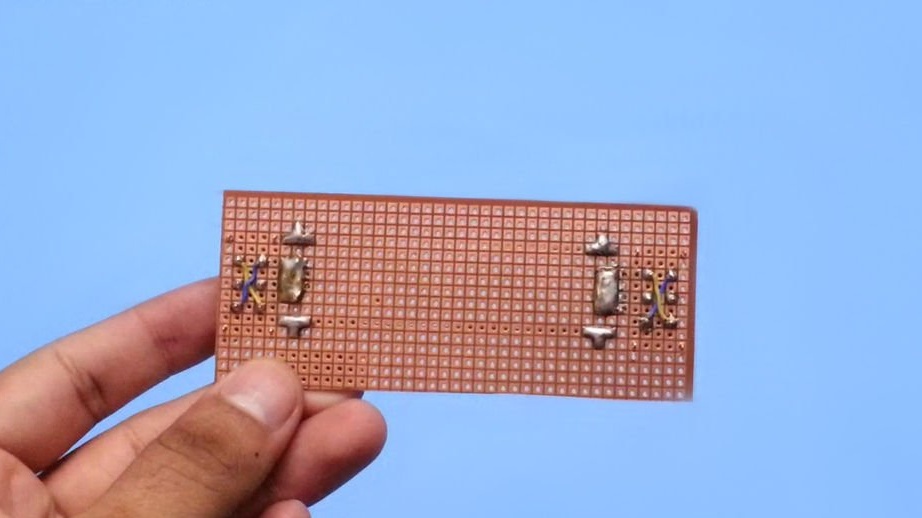
Agora, o outro lado do painel de controle remoto parece diferente. O cabo é fixado com adesivo hot-melt; é importante que exista uma camada isolante desse adesivo entre ele e a placa de ensaio. Agora, esse lado da placa precisa ser coberto com um dielétrico, pois os pulsos de auto-indução ocorrem quando os motores são desligados.
Tudo pronto:

Devido às características de design da robosnake, com as mesmas posições do interruptor, os motores devem girar em direções opostas. Se não for esse o caso, um deles deve ser revertido. Depois disso, escolha experimentalmente a posição do controle remoto, na qual a posição direta dos dois interruptores corresponde ao movimento para frente. Os motores podem ser parados e revertidos separadamente, forçando a robosnake a executar vários truques.