Sua marcha é muito semelhante a uma barata real. Ao caminhar, dá um pequeno passo confiante para a frente. A barata possui um mínimo de peças complexas e é muito fácil de fabricar.
1. teste de vídeo
O vídeo mostra uma barata mecânica de diferentes ângulos durante sua operação e movimento.
2. Características e características.
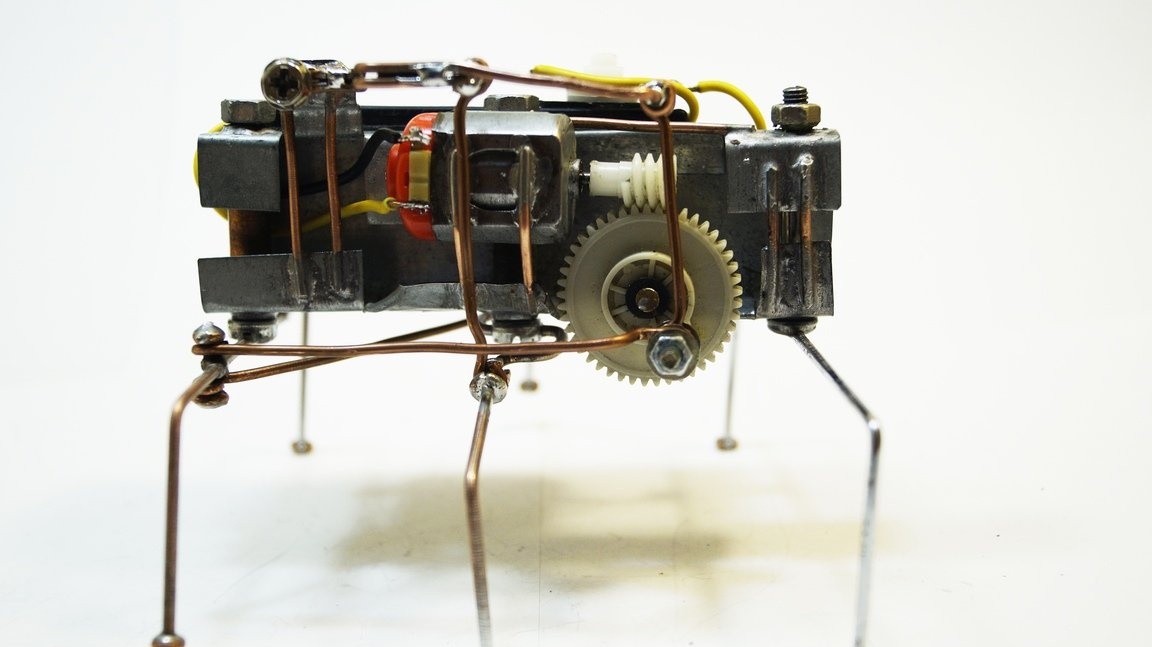
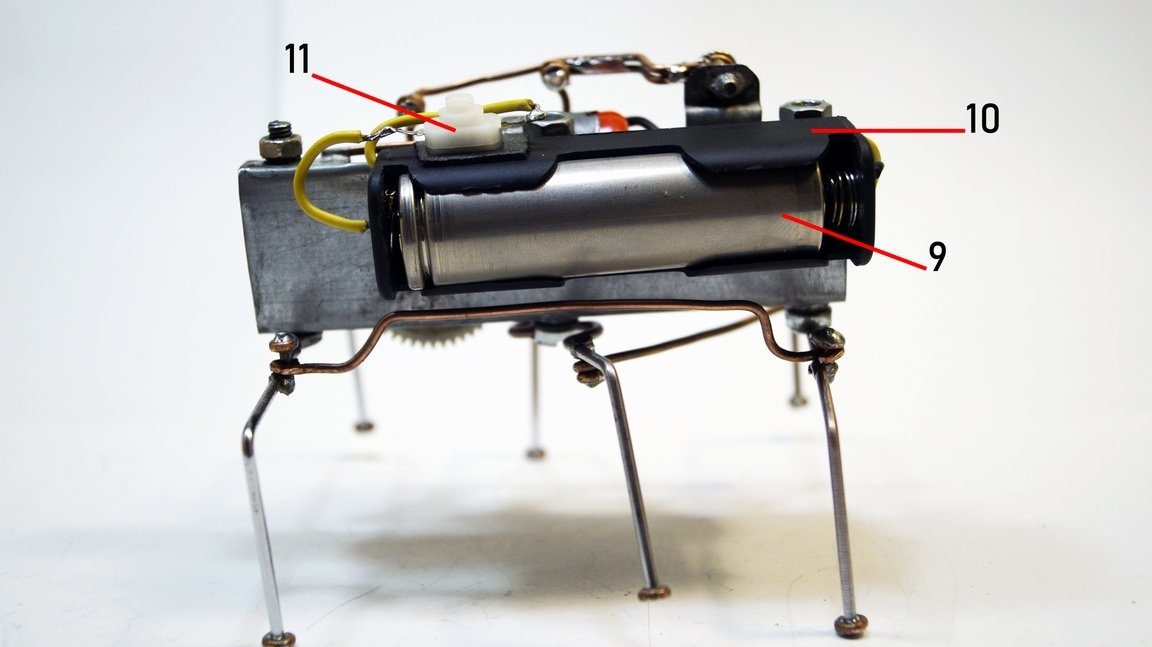
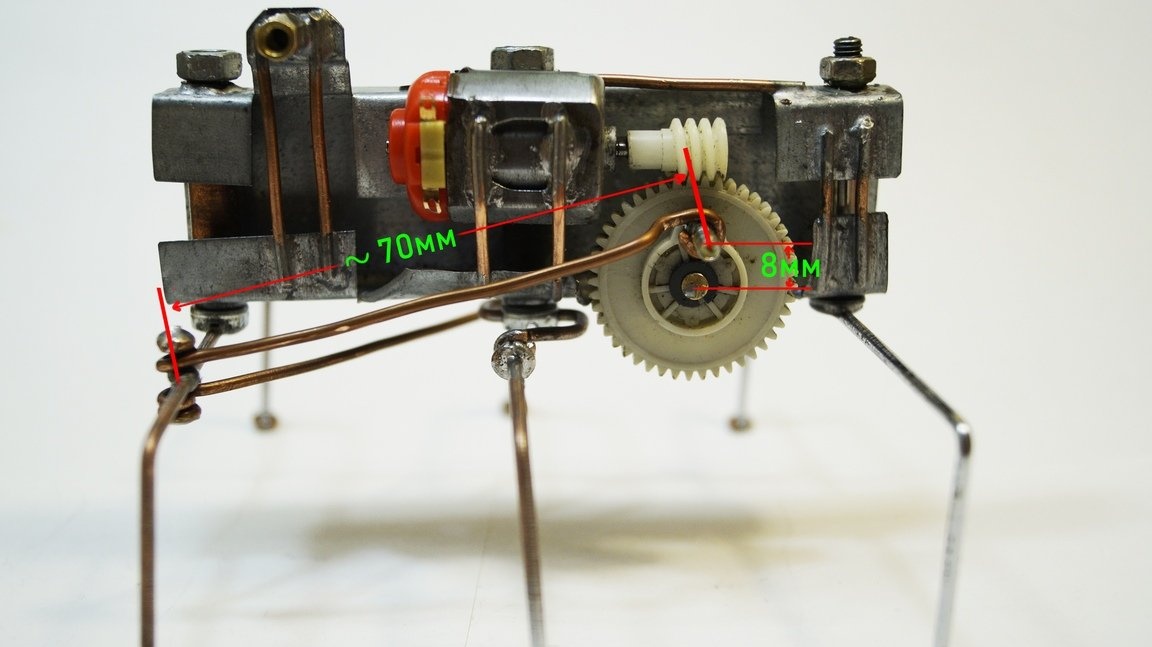
Em uma foto 1. A barata mecânica é mostrada, vista lateral. Em uma foto 2. A vista superior é mostrada.
Foto 1.
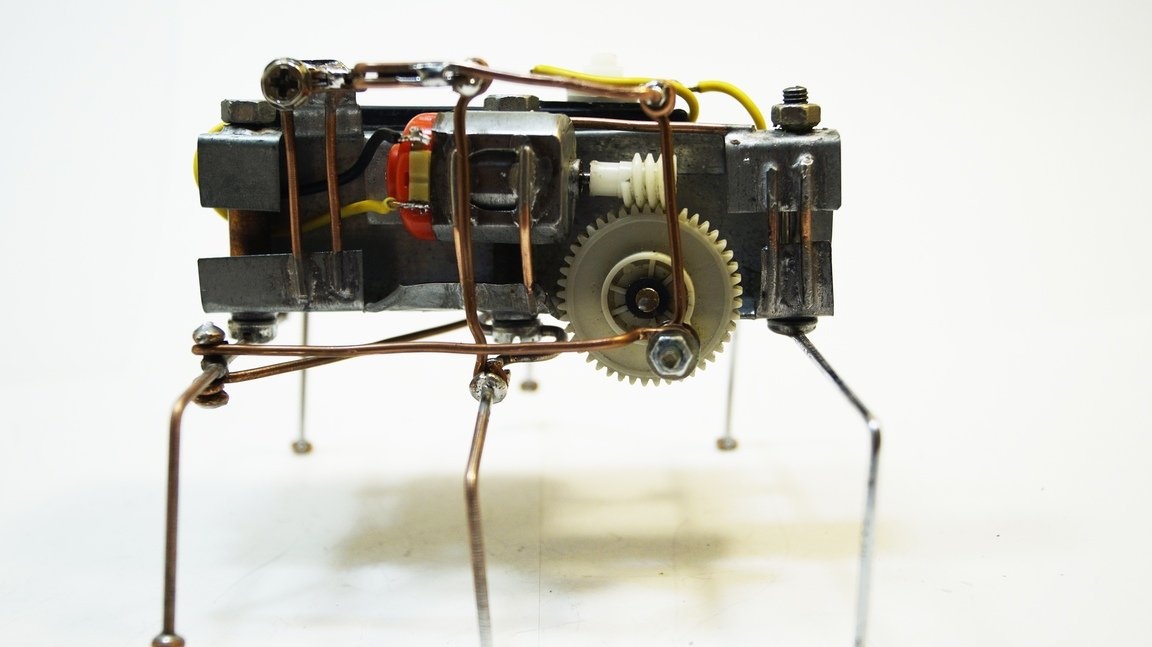
Foto 2.
DESIGN Como moldura, foi utilizado o perfil ppn-2 30X20. O motor e outras juntas foram montadas por solda. As patas de uma barata prendem-se com parafusos M6. O botão liga / desliga e o compartimento da bateria estão colados em fita dupla face. Como tração para acionar as pernas de uma barata, foi utilizado um cabo de cobre com seção de 2,5 mm.
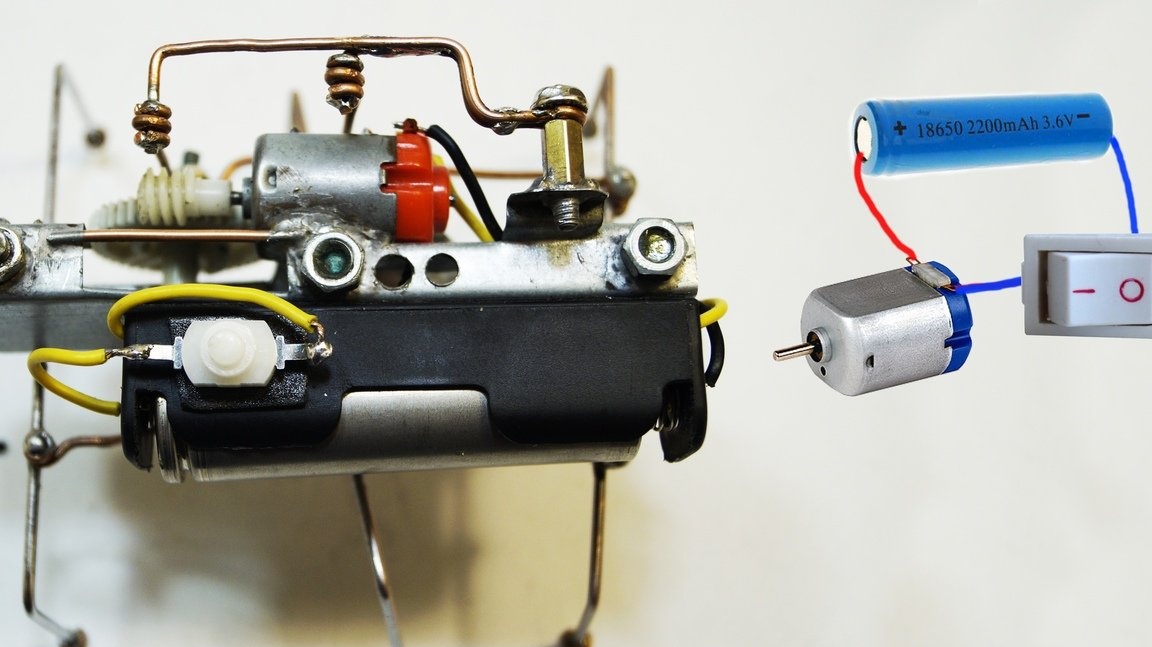
MOTOR E MANIFESTAÇÕES. O motor e o eixo da manivela são soldados ao chassi do POS-61, ácido de solda ZnCl (cloreto de zinco). Para aumentar o torque e reduzir o tamanho, foi usada uma engrenagem helicoidal.
NUTRIÇÃO. Uma bateria 18650 foi usada como potência do robô, a fonte de energia é de 3.7V.
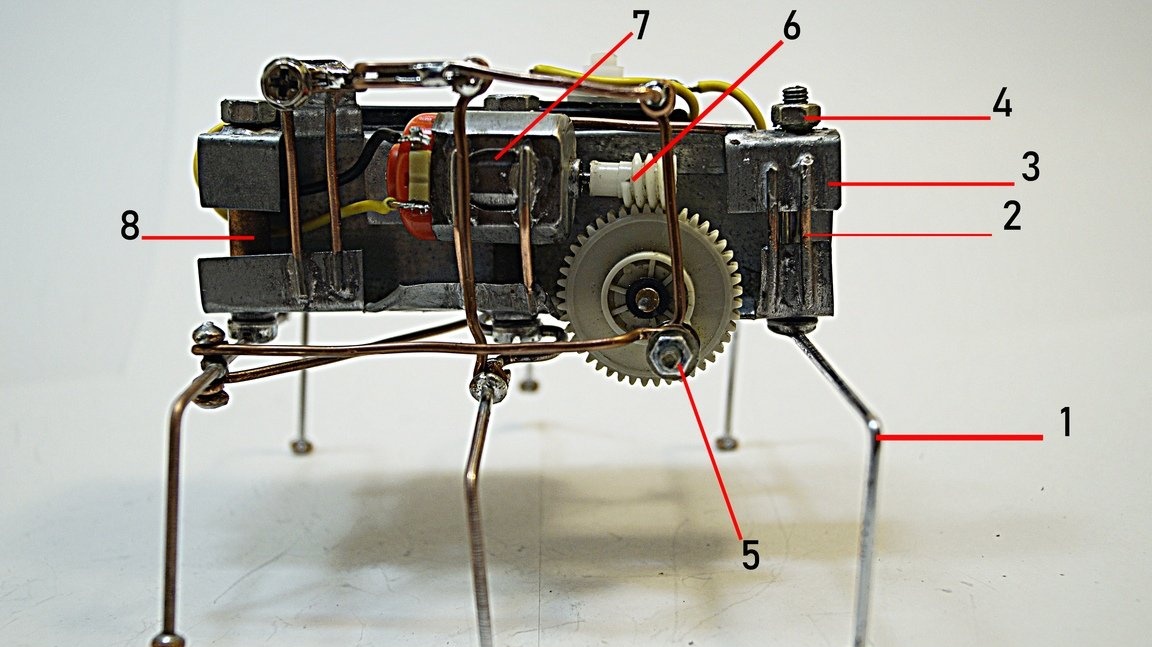
DETALHES DO PROJETO ROBÔ
1. Patas de uma barata.
2. O reforço.
3. O quadro.
4. O eixo das patas de uma barata.
5. Mecanismo de manivela.
6. Worm drive.
7. Motor elétrico F130 5 V.
8. O eixo da manga das patas de barata.
9. Tipo de bateria 18650, 3,7 V.
10. Compartimento da bateria.
11. botão liga / desliga.
3. O princípio do trabalho.
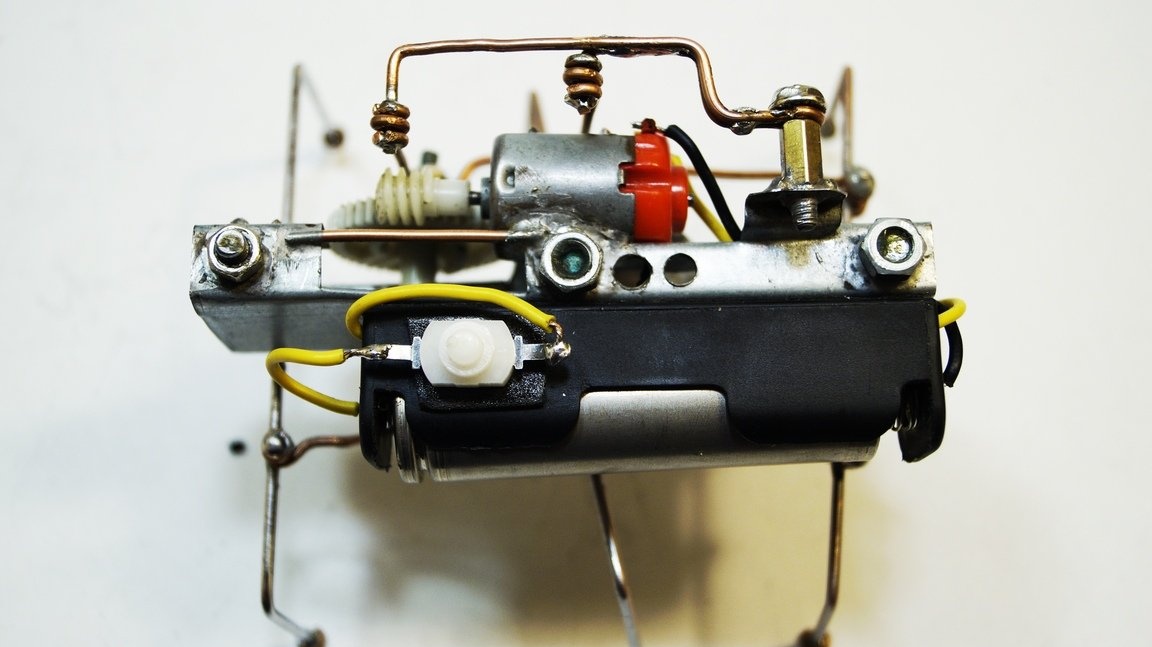
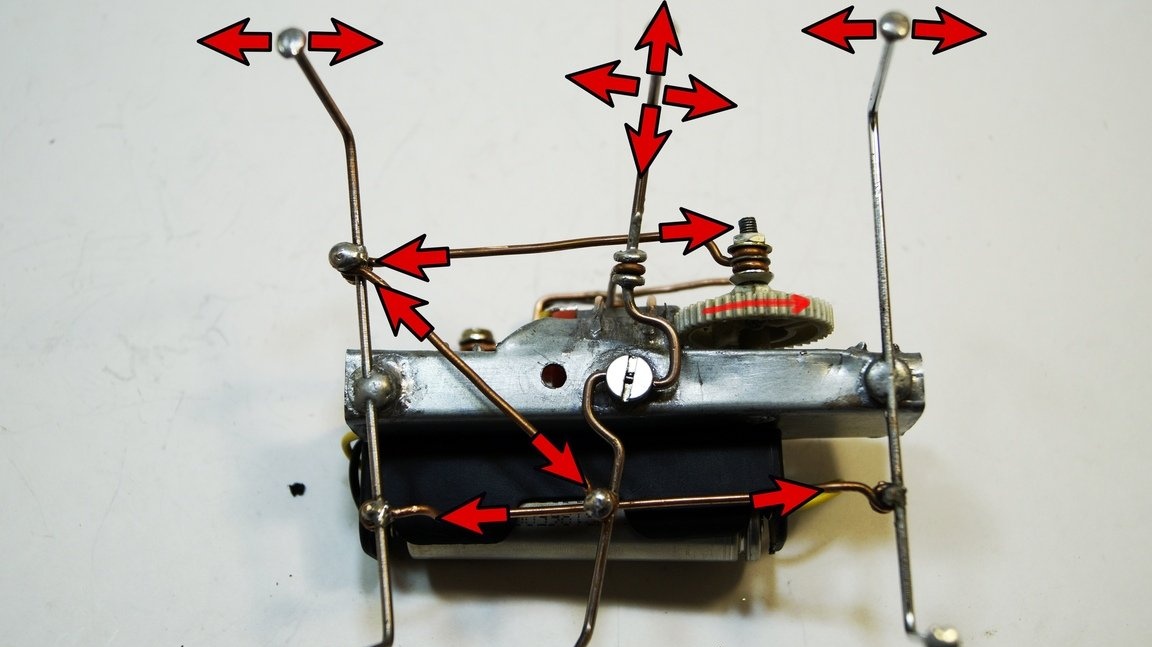
Em uma foto 3. 4. O princípio do trabalho de partes mecânicas de uma barata mostra-se. Vale lembrar que as pernas dianteiras e traseiras do robô estão se movendo horizontalmente, e as pernas do meio estão se movendo vertical e horizontalmente.
A energia é fornecida ao motor elétrico através da chave, o motor gira o mecanismo de manivela. A manivela aciona a pata dianteira por tração, respectivamente, a partir da pata dianteira, o impulso empurra a pata traseira (elas se movem em sincronia). O par de patas do meio está conectado ao primeiro par, transversalmente (eles se movem na antifase).
Para mover o par de patas do meio na vertical, uma alavanca é montada acima do motor, que é acionada pelo mecanismo de manivela.
Foto.3
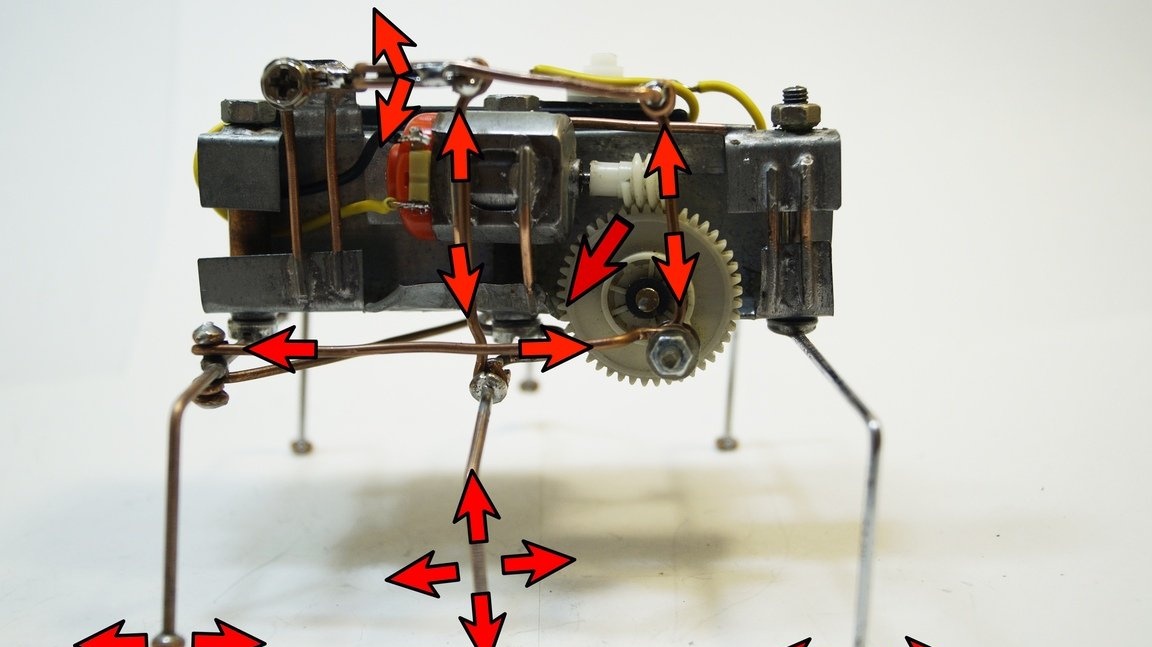
Foto.4
4. Materiais e ferramentas.
1. ferro de solda 50W.
2. Compartimento da bateria.
3.Prysoy POS-61.
4. Um fio de cobre com uma seção de 2,5 mm.
5. Ácido de solda ZnCl (cloreto de zinco)
6. Motor elétrico F130 5V.
7. Tesoura para metal.
8. Worm drive.
9. Alicates.
10. Tubo de aço, diâmetro 80mm.
11. Bateria recarregável 18650.
12.Perfil PPN-2 30X20.
E também: (botão liga / desliga, fita dupla face, fio de montagem)

5. Instruções de montagem.
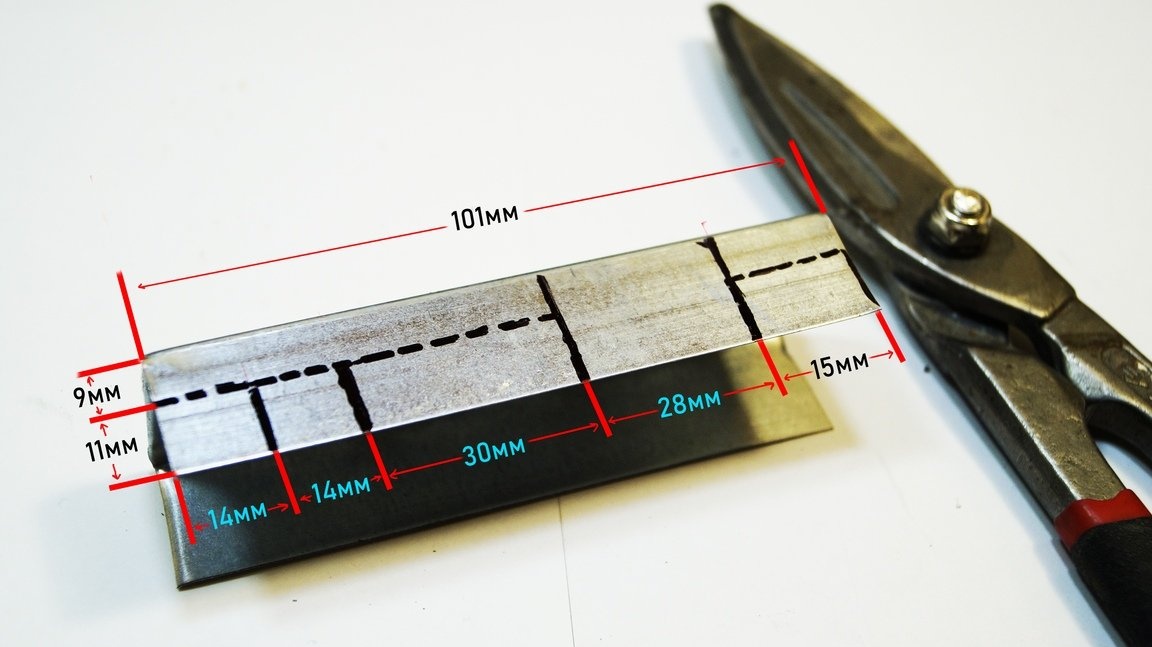
1.Fazer um quadro de barata.
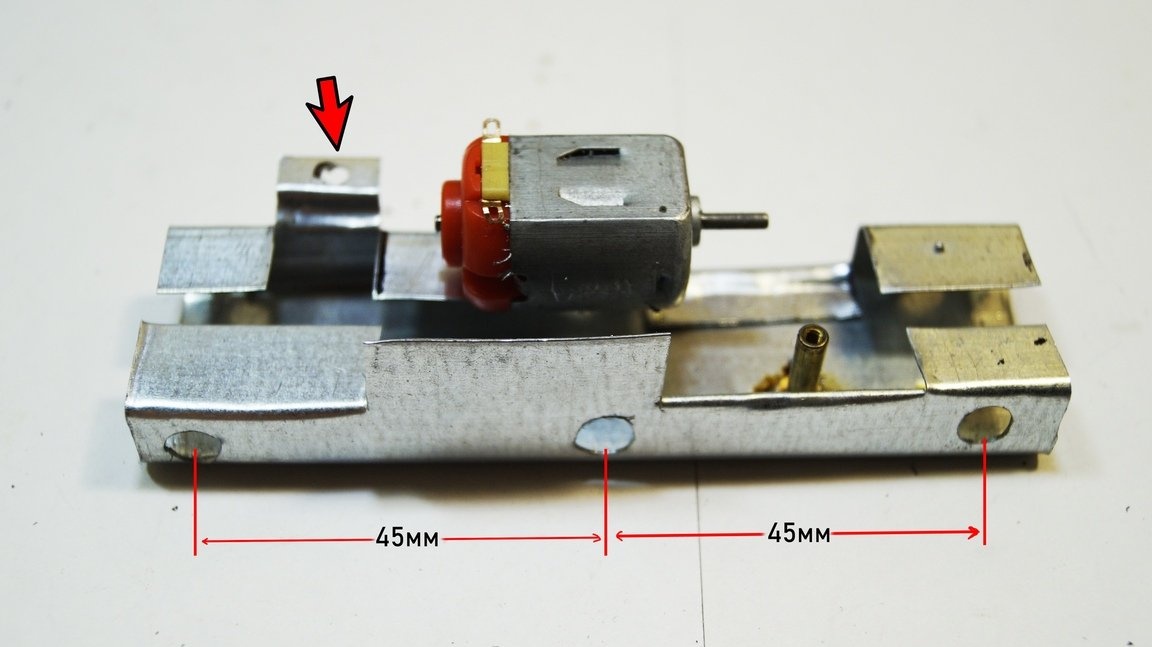
Desenhe a marcação no perfil, conforme indicado na Foto 5.
Foto 5.
Usando uma tesoura para metal, cortamos e dobramos a peça de trabalho com um alicate, como mostrado na foto 6. Marque a parte inferior como indicado na foto 6. Dobre o perfil com um alicate como na foto 7.
Foto 6.
Foto 7.
2. Motor elétrico e eixo de manivela.
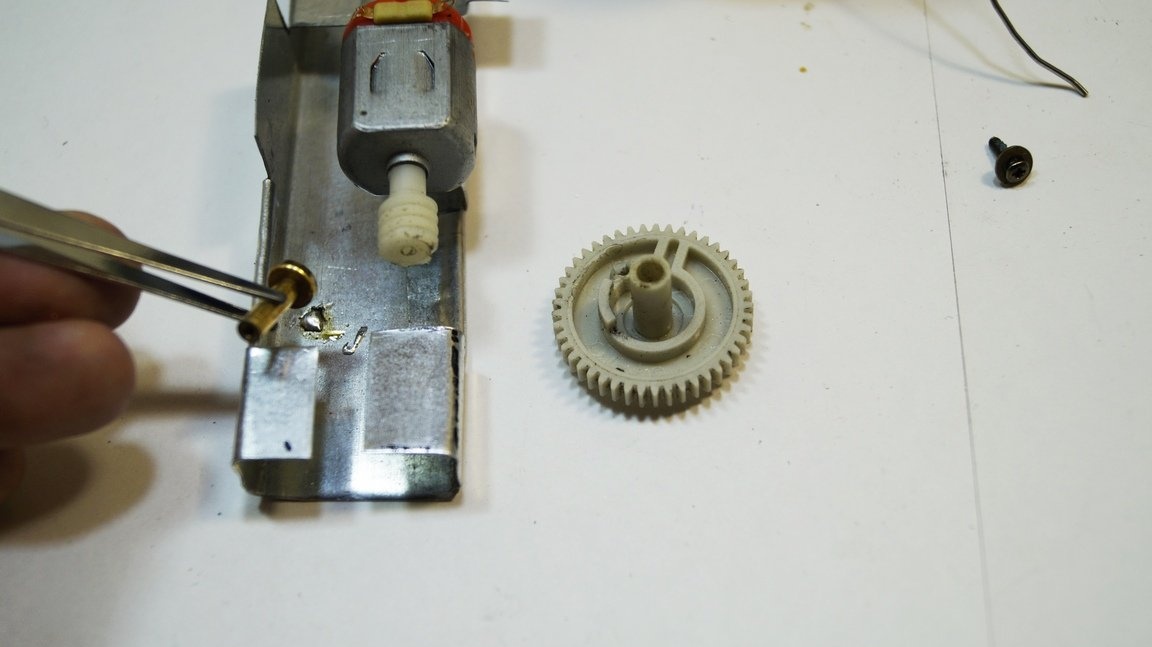
O próximo passo é soldar o motor elétrico no quadro. O motor antes da soldagem precisará ser desmontado. Inundamos a carcaça do motor e a estrutura com um ferro de solda Foto 8.
Soldamos o corpo do motor elétrico e a estrutura juntos, aquecendo bem as peças com um ferro de solda, pressionando-as uma à outra Foto 9. !!! CUIDADO, DETALHES CALOR MUITO AQUECIDO !!!
Foto 9.
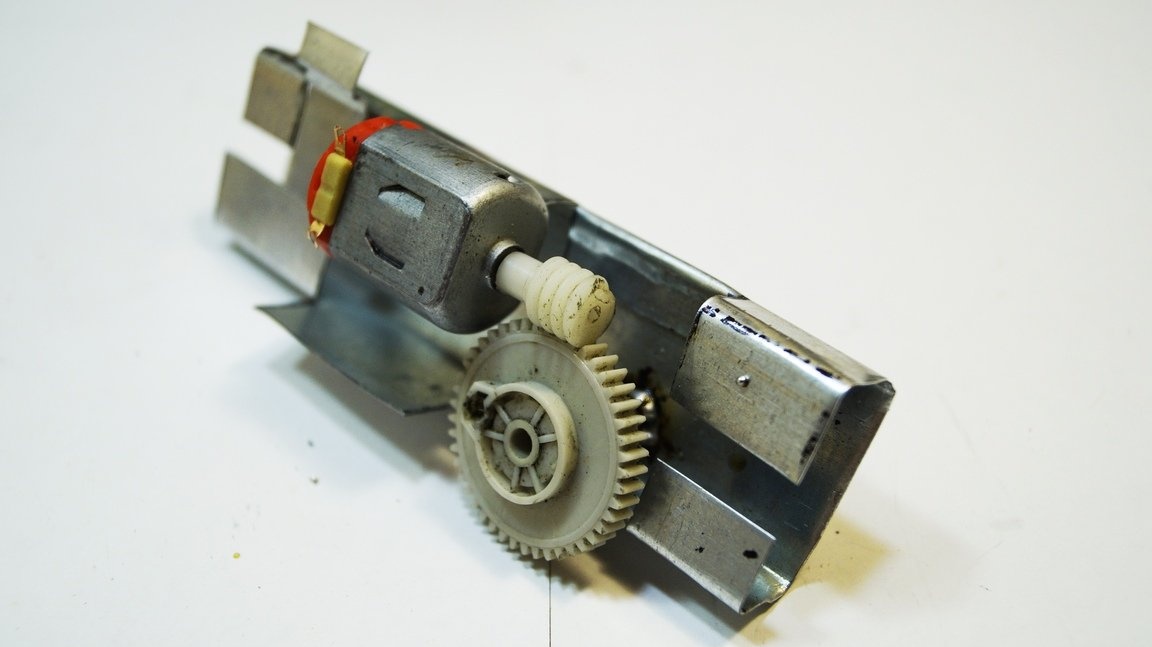
Colocando o motor elétrico de volta. Soldamos o eixo da manivela no lugar, isso é feito experimentalmente. A engrenagem helicoidal deve estar bem montada, as engrenagens não devem ser inclinadas Foto 10.11.
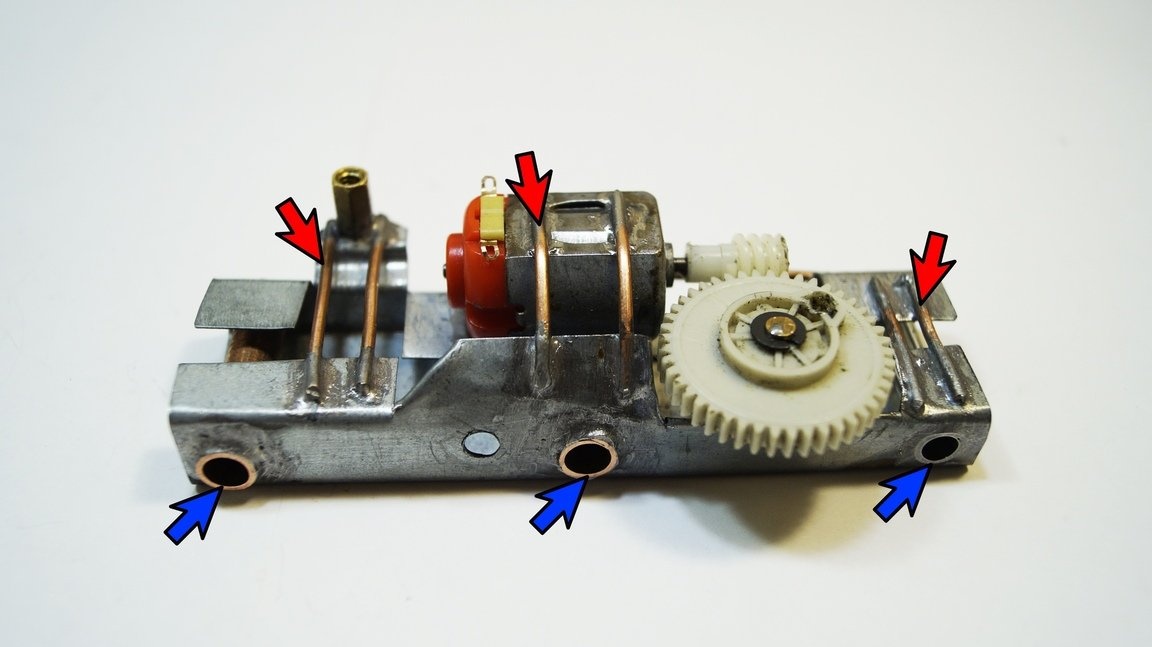
3. Buracos para as pernas de uma barata.
Para prender as patas de barata na estrutura, é necessário fazer furos com uma broca de 8 mm. Realizamos um furo no ouvido atrás do motor elétrico com uma broca de 3,2 mm
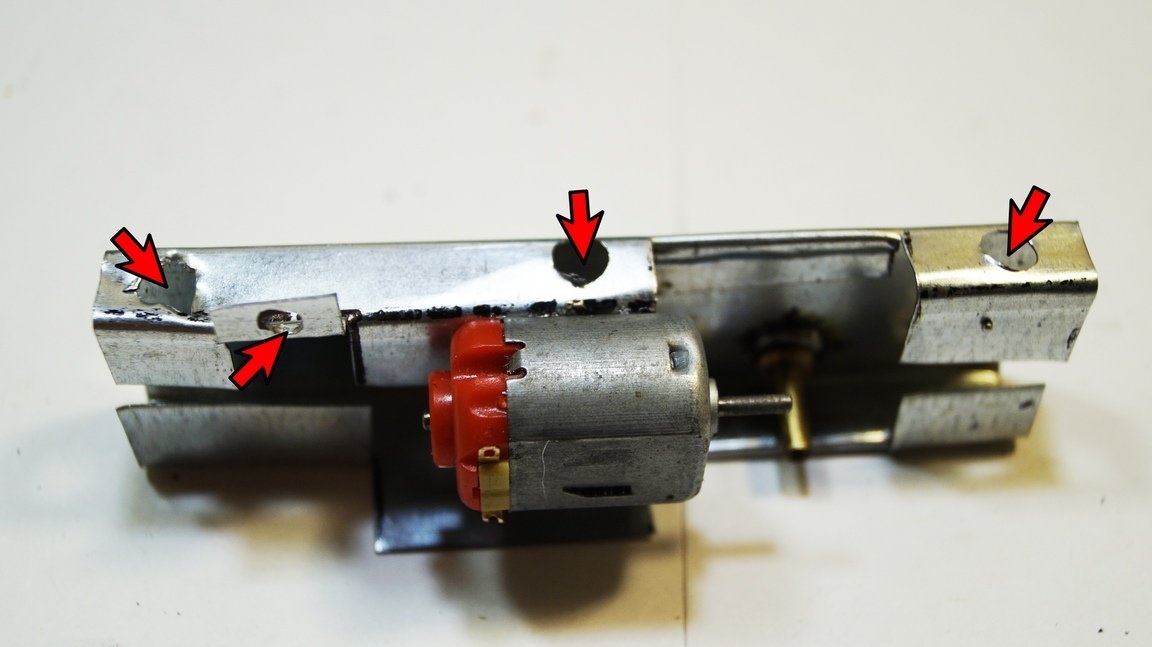
Também soldamos uma porca na orelha atrás do motor elétrico. A alavanca responsável por levantar as patas do meio ao longo do eixo vertical será presa a esta porca
Para reforçar o design da estrutura, os reforços foram soldados com um fio de cobre de 2,5 mm.
As buchas de 8 mm também foram soldadas nos pontos de fixação das patas de barata Foto 15.
4. Patas de uma barata.
Um fio de metal com um diâmetro de 3 mm foi usado como patas de barata. Ele é soldado à cabeça do parafuso M6. Foto 16. O par médio de patas de barata é feito de maneira diferente, um orifício é perfurado na cabeça do parafuso ao longo do diâmetro do fio. O fio é dobrado na forma da letra “S”, permitindo que as pernas da barata se movam verticalmente Foto 17.
Foto 16.
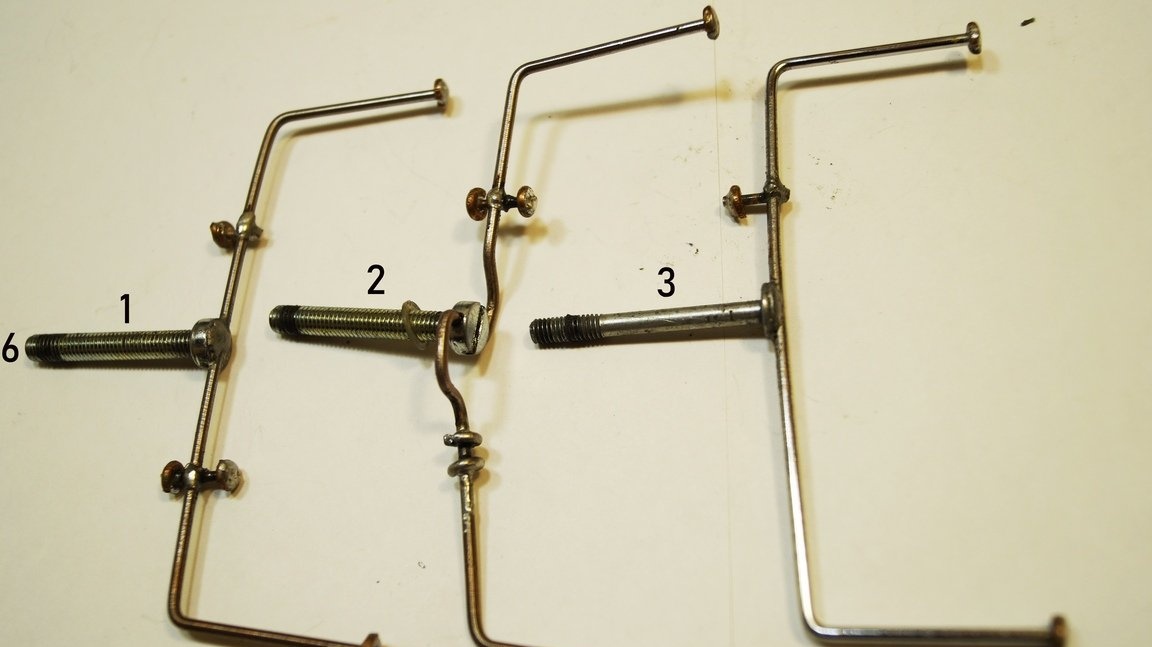
Foto 17.

Para fixar as hastes, um fio de cobre com uma seção de 2,5 mm de comprimento e 12 mm de comprimento é soldado às patas da barata, anéis de cobre são soldados nas extremidades. As hastes são feitas de fio de cobre com uma seção transversal de 2,5 mm, as dimensões são aproximadas, é aconselhável dobrar o fio para que no futuro haja a possibilidade de ajuste ao longo do comprimento da Foto 18.
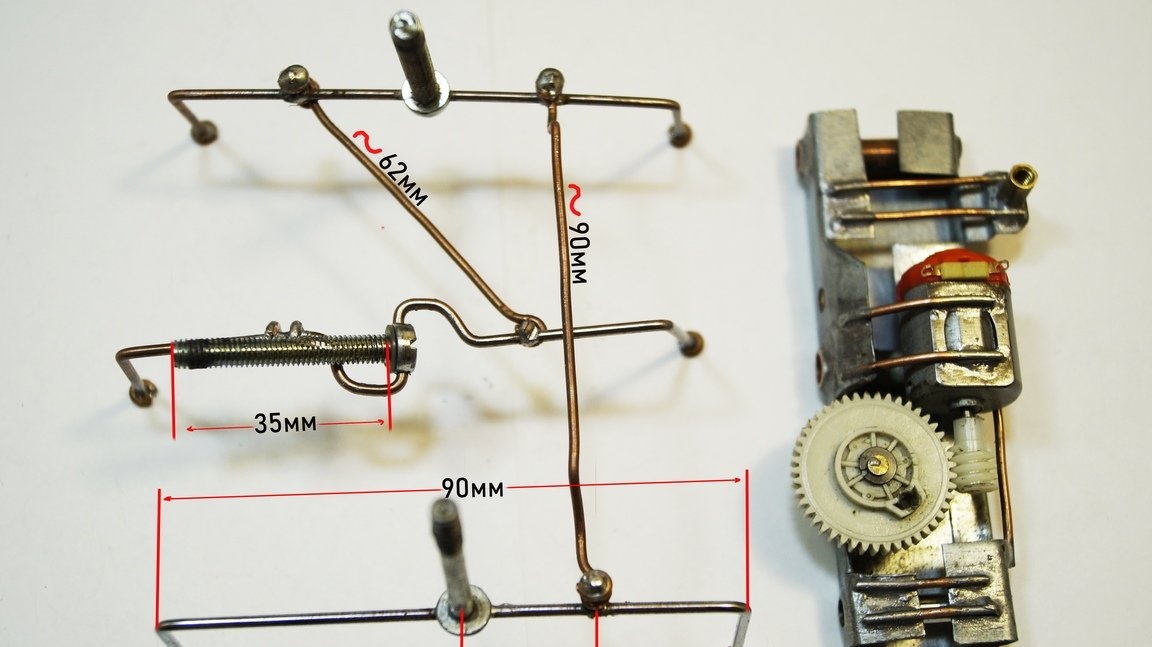
A foto 19 mostra uma vista inferior, com as patas montadas na moldura.
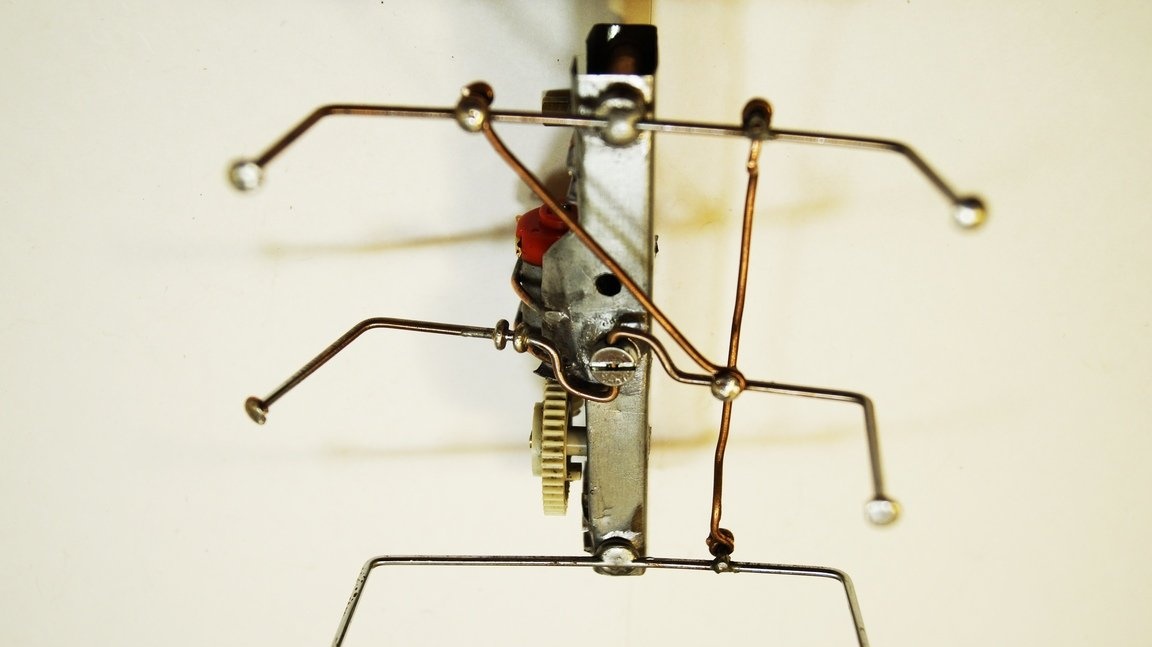
Estabelecemos tração desde o mecanismo de manivela até as pernas dianteiras da barata. Nós fazemos um impulso com uma bainha para a capacidade de ajustá-lo. Raio de manivela 8mm Foto 20.
Fazemos uma alavanca para mover as patas do meio verticalmente a partir do fio de cobre Foto 21.22.
Isso completa a parte mecânica da barata.
Foto 21.

A foto 22 mostra a localização das patas na posição inferior do eixo do mecanismo de manivela.
Foto 22.

5. A parte elétrica.
Cole o compartimento da bateria em uma fita dupla face na moldura da barata. Cole o botão liga / desliga no compartimento da bateria. Soldamos todos os elementos da Foto 23.
O robô - a barata está pronta !!!