
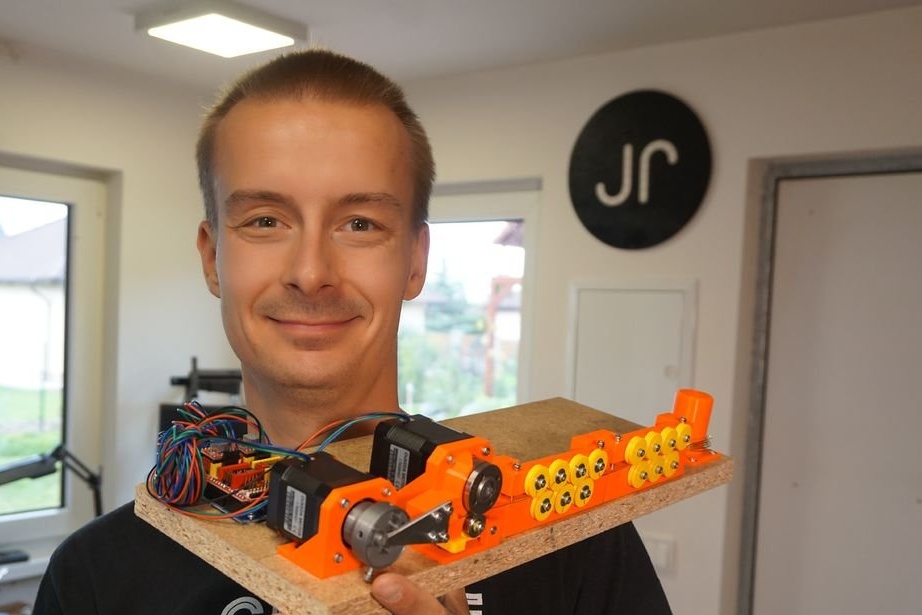
Um dispositivo interessante foi inventado e fabricado pelo Mestre, este é um aparelho para dobrar fios de qualquer forma. Fazer molas é uma das suas características. Esta máquina é capaz de dobrar fios de 0,8 / 0,9 / 1 mm em qualquer formato 2D.
O principal objetivo da fabricação desta máquina era automatizar o processo de dobragem. Outras máquinas caseiras não são muito precisas e suas curvas têm um raio bastante grande.
A segunda tarefa era simplificar o máximo possível, usando peças e componentes geralmente disponíveis. Algumas partes da máquina são impressas em uma impressora 3D e peças de metal podem ser compradas na loja.
Para que serve o mestre dessa máquina? Ele está interessado em fazer figuras de LED, flocos de neve, estrelas, flores, etc. Em sua fabricação, são necessárias peças idênticas de arame, e esta máquina facilitará sua fabricação.
Vamos assistir a um pequeno vídeo com um exemplo do dispositivo.
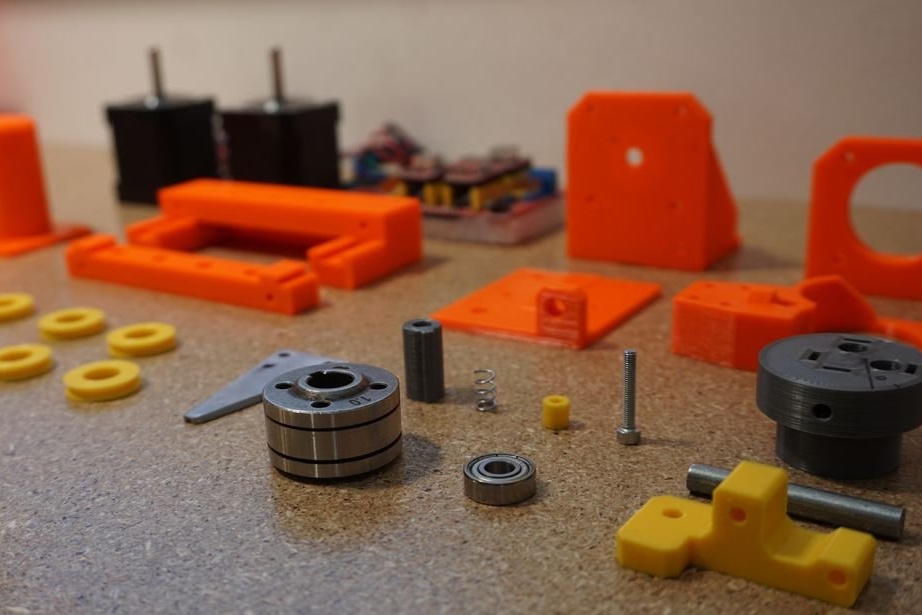
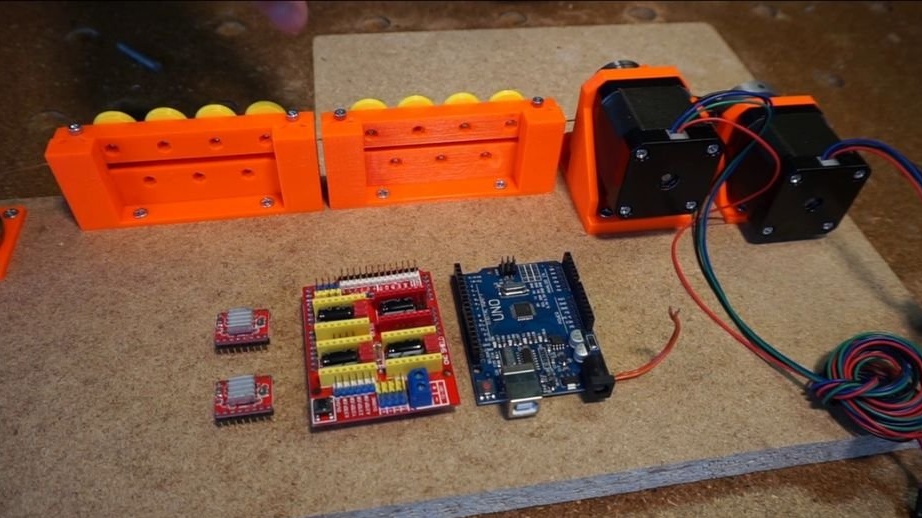
Assim, para a fabricação dessa máquina, o mestre usou os seguintes
Ferramentas e materiais:
Detalhes -3D (os arquivos de impressão podem ser baixados aqui);
-Fixadores;
-Arduino ONU;
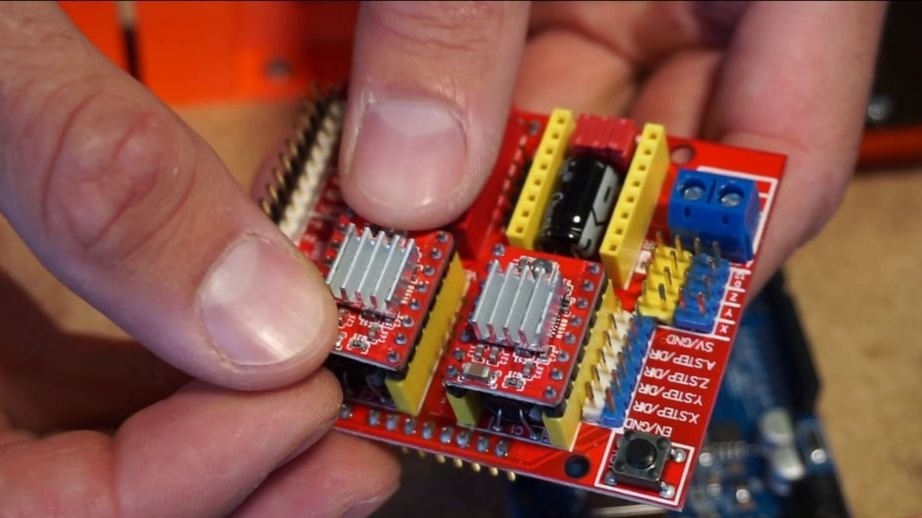
-Placa de expansão para o Arduino UNO;
- Driver de passo A4988 -2 peças;
Motor de passo NEMA17 -2 peças;
-12V 3A fonte de alimentação;
- mecanismo de alimentação de arame;
-Mola de aço 4x6 mm;
- Rolamento 3x10x4 mm;
-Suporta 6x15x4 mm;
Haste de aço de -6 mm;
- Chapa de aço com 2 mm de espessura;
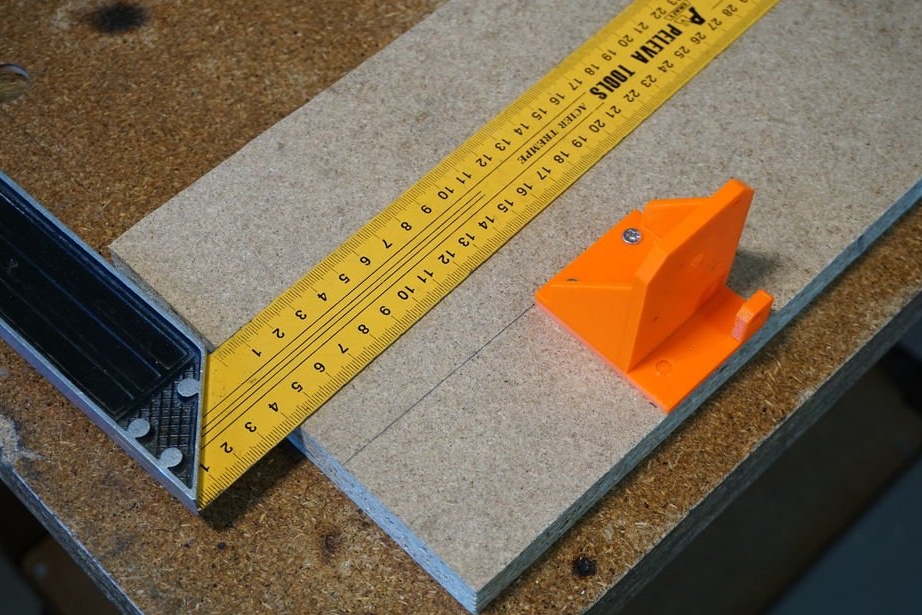
-Placa de madeira para a base 450x100 mm;
- chave de fenda;
-Gon;
Etapa 1: como funciona
Vamos ver como a máquina funciona (da direita para a esquerda).
Suporte do carretel - ele segura o carretel de fio para processar a máquina.
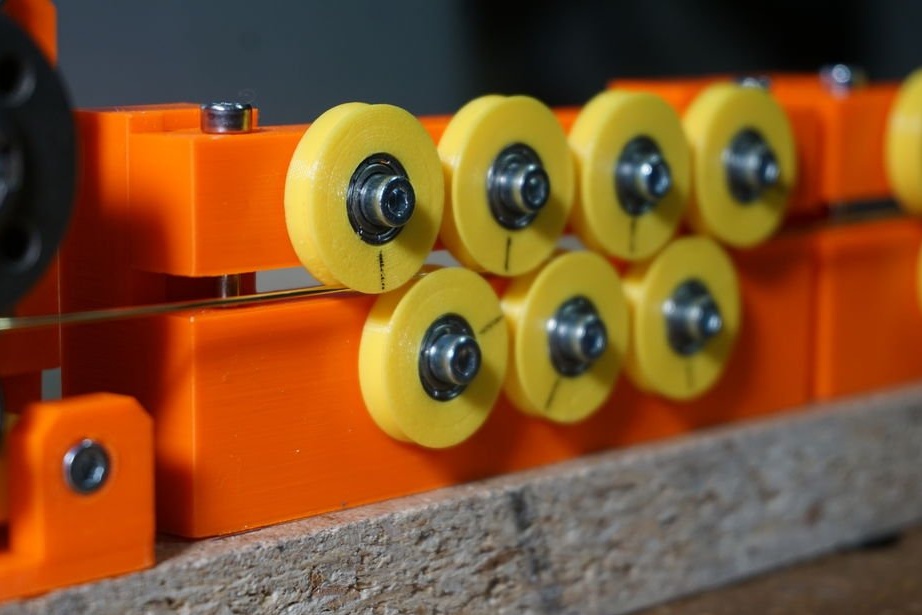
Retificador - um conjunto de 7 rolos para que o fio fique o mais uniforme possível. Trabalhar com fio reto é crucial. É por isso que dois retificadores.
Broche - você pode encontrar um mecanismo semelhante na sua impressora 3D. Um conjunto de engrenagens puxa o fio do carretel através dos rolos e o empurra para a cabeça de flexão. O mecanismo de alimentação deve ter pressão de fio suficiente para que não escorregue. Mais sobre isso mais tarde.
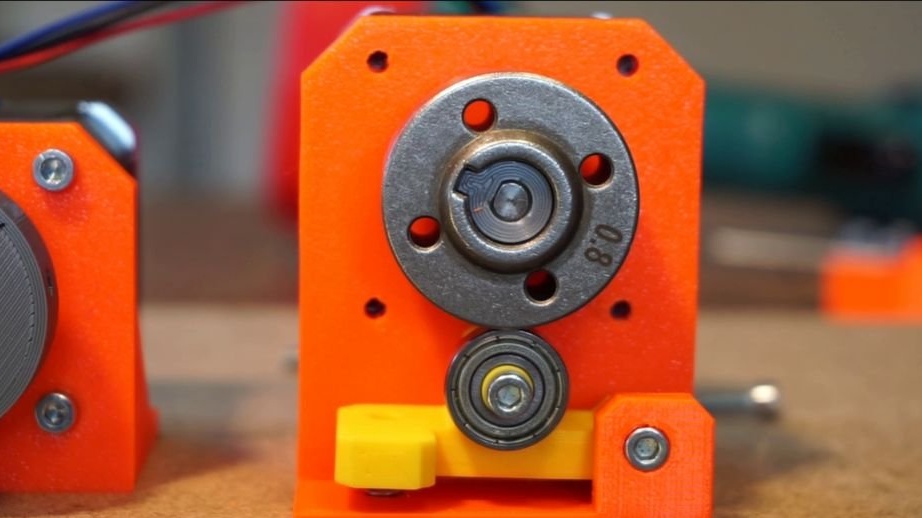
Dobradeira - dobra o fio em uma forma programada.
Tudo isso é controlado por um Arduino UN com uma blindagem CNC.Um comando é enviado ao Arduino a partir do computador e os converte em comandos para motores de passo.

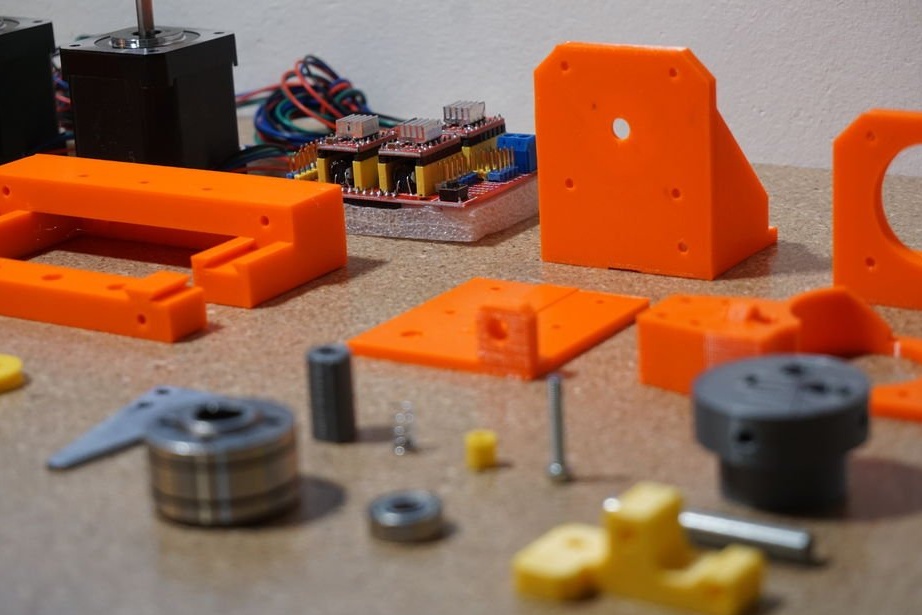
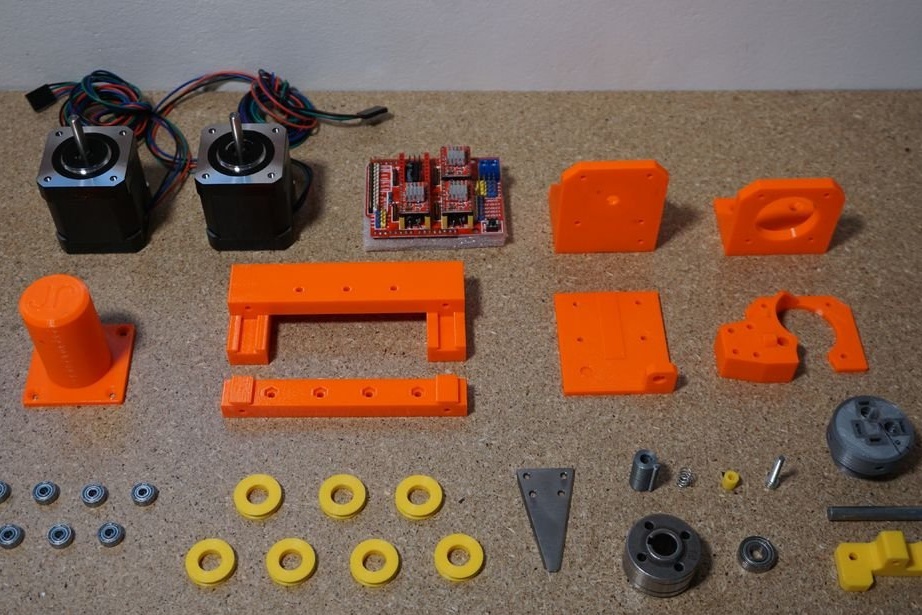
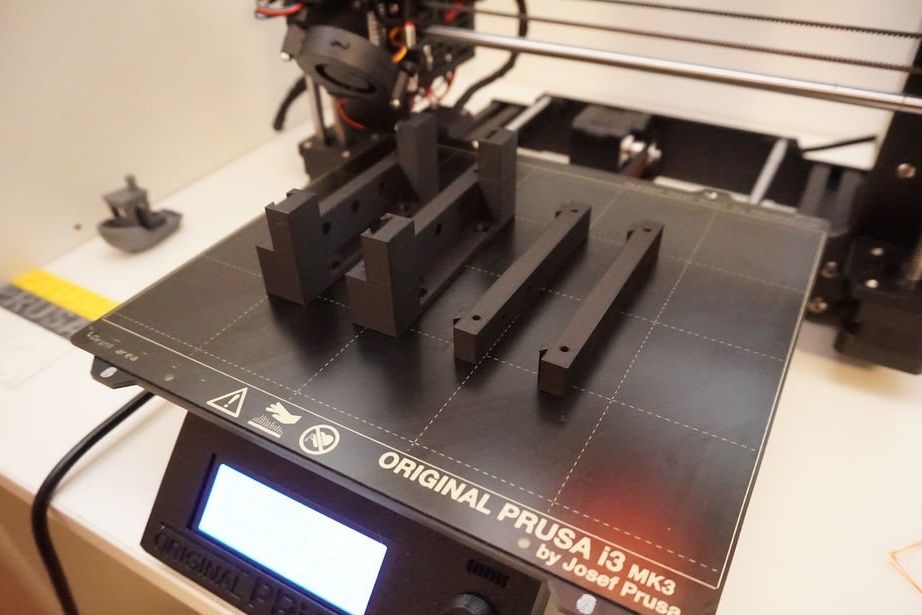
Etapa 2: Imprimir peças
Você precisa imprimir os seguintes detalhes e na seguinte quantidade (para evitar confusão, o texto original):
Bender
Cabeça ferramenta
Quadro do motor
Feeeder
Quadro do motor
Quadro inferior
Guia do fio
Transporte da engrenagem intermediária
Espaçador da engrenagem intermediária
Espaçador de engrenagem de alimentação
Placa de flexão (modelo)
Rolos alisadores (2x)
Estrutura de cama (2x)
Quadro das engrenagens superiores (2x)
Rolo (14x)
Suporte do carretel
Altura da camada ao imprimir 0,15 mm. 40% de enchimento. A impressão demora 2 dias.

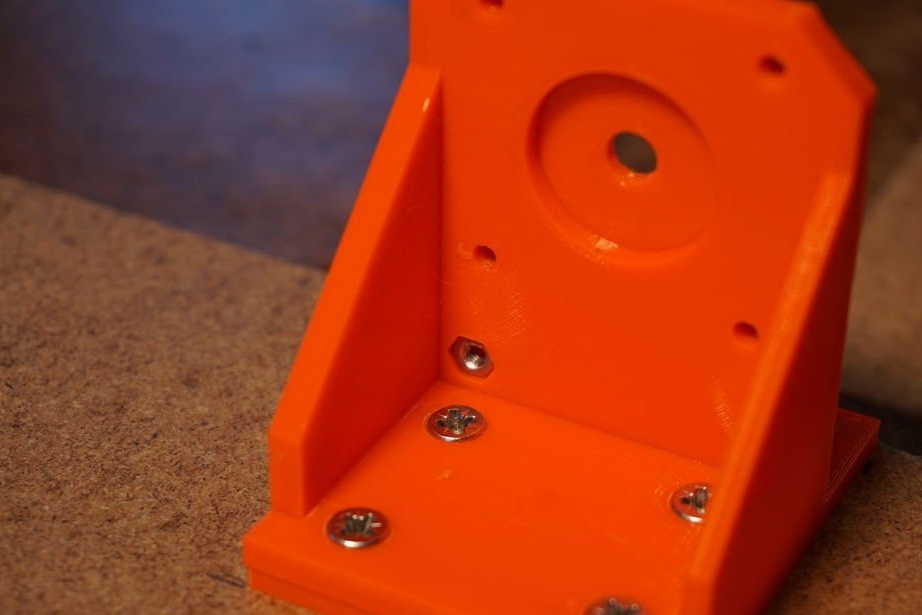
Etapa três: dobradeira
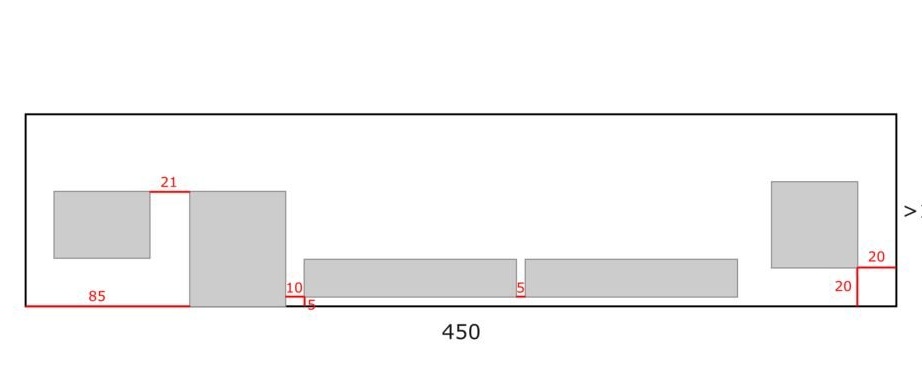
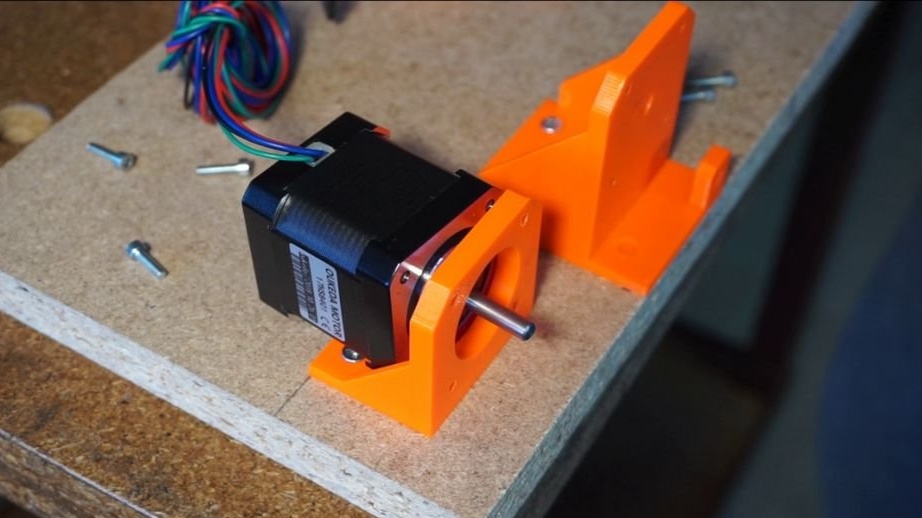
O mestre parafusa dois quadros na base. É importante instalar os dois quadros, como mostrado no desenho.
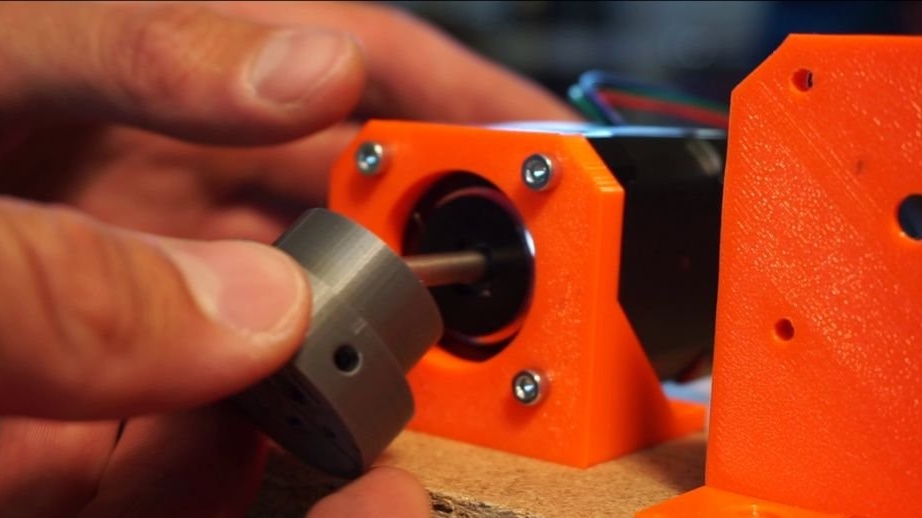
Prende o motor de passo ao quadro. Prende a cabeça no eixo do motor.



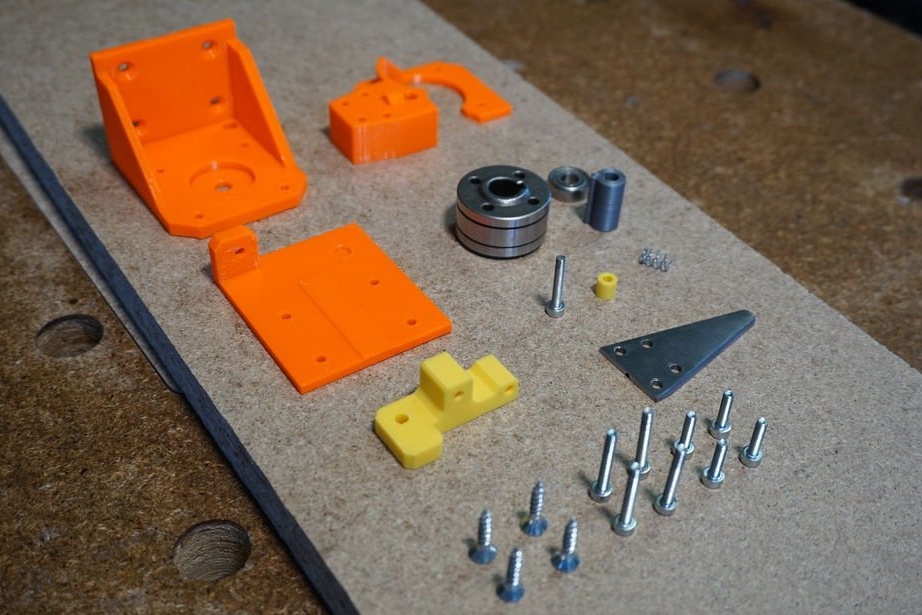
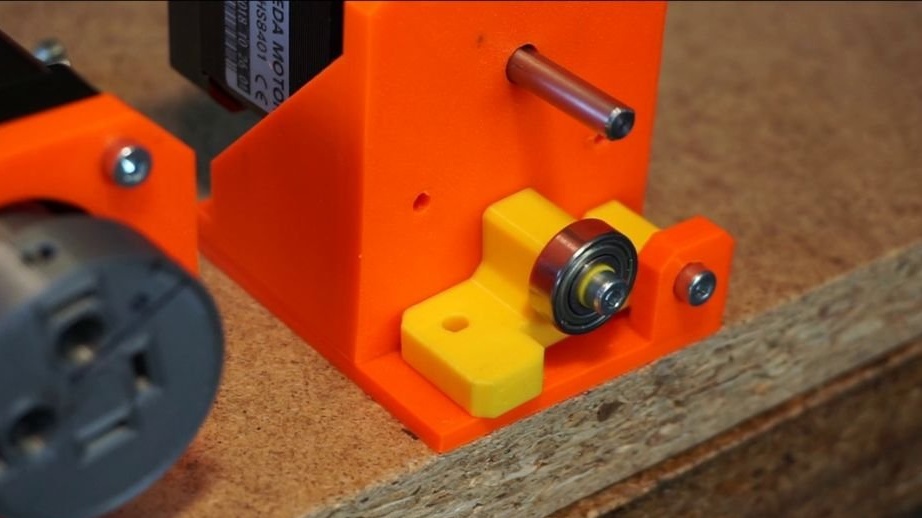
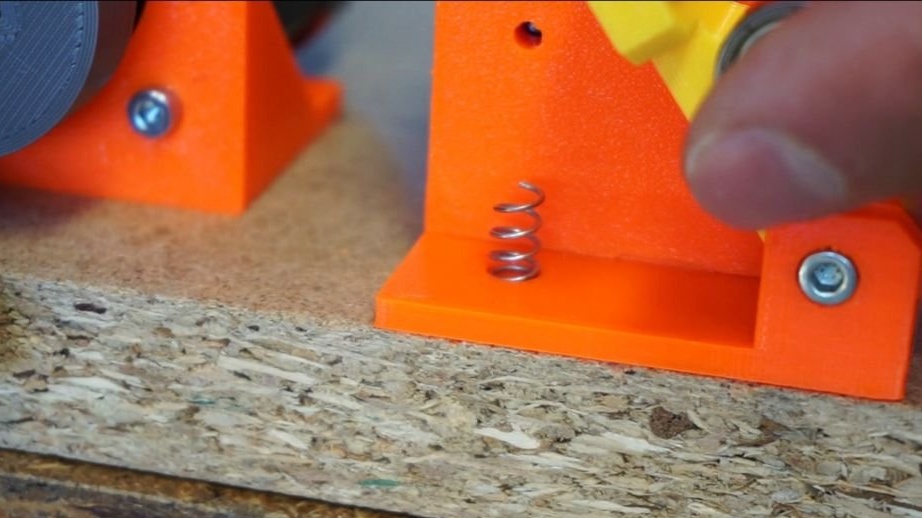
Etapa quatro: espeto
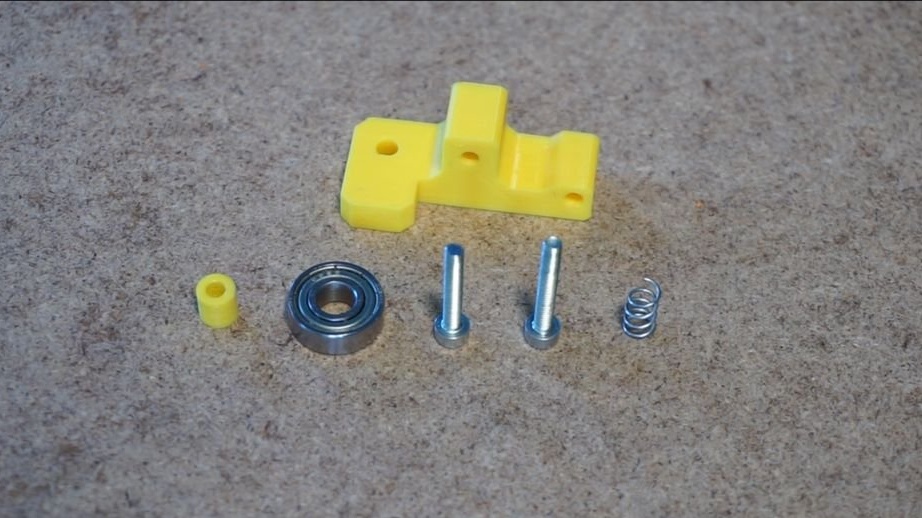
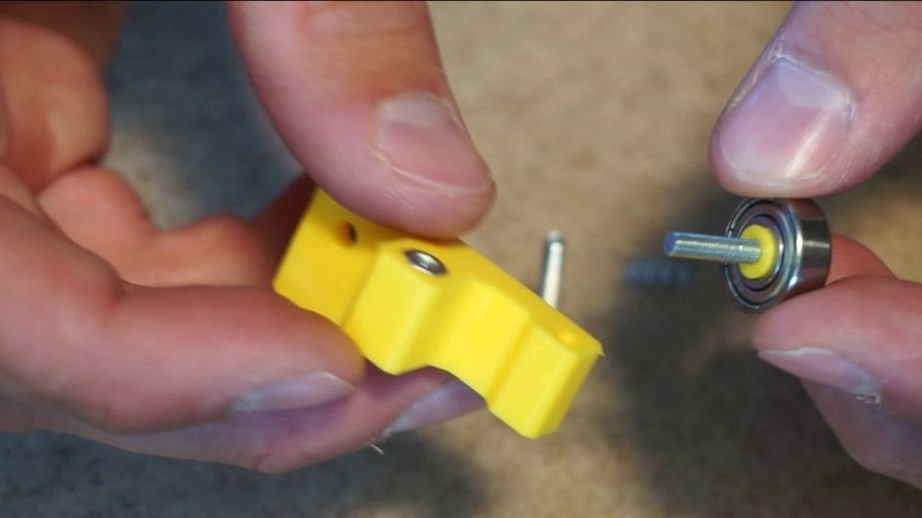
A estrutura já está instalada, portanto, o primeiro passo na criação de um mecanismo de alimentação é construir um carro para a engrenagem intermediária, que pressionará o fio no mecanismo de alimentação. Remova a junta de plástico dentro do rolamento 6x15x4 mm. Instale o rolamento no parafuso M3x20. Instale a porca M3 no carro e parafuse o rolamento no parafuso. Verifique se o rolamento gira livremente. Insira a segunda porca M3 na estrutura do motor (lado do motor no canto inferior esquerdo) e aparafuse o carro através do suporte pequeno usando o parafuso M3x20. Não aperte demais o parafuso, o carro deve se mover livremente. Levante o carro e insira a mola no orifício abaixo dele.
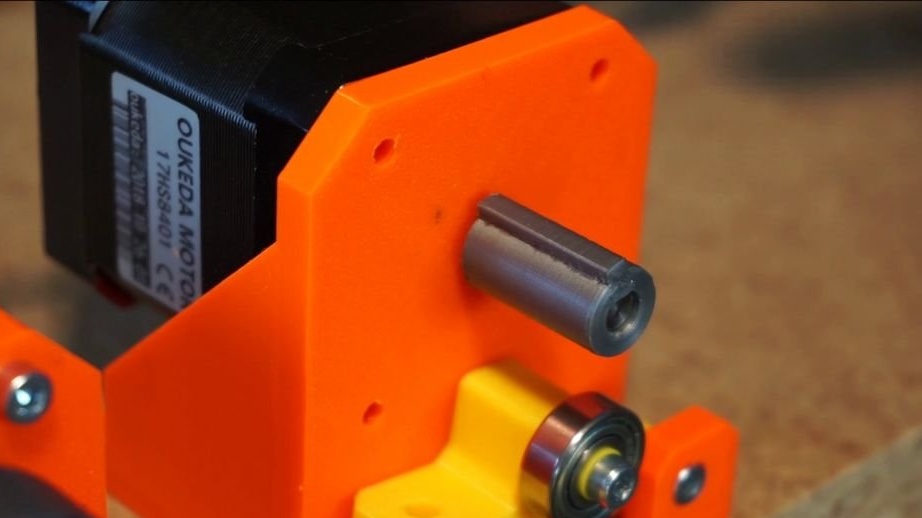
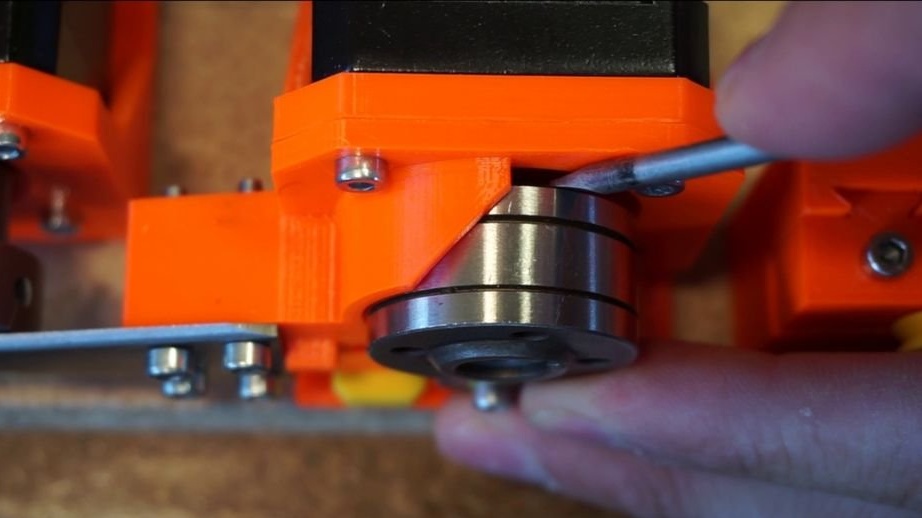
Pegue o segundo motor de passo e instale-o na estrutura do motor. Não estrague ainda. Pressione o espaçador do mecanismo de alimentação no eixo do motor e instale o mecanismo de alimentação.
O mecanismo de alimentação usado pelo mestre é obtido de uma máquina de solda MIG. O mecanismo possui dois recessos na bobina. Um para fio de 0,8 mm e outro para fio de 1 mm. Ao contrário das engrenagens (anteriormente o mestre tentou alimentar o fio com elas), esse mecanismo não deixa vestígios no fio.
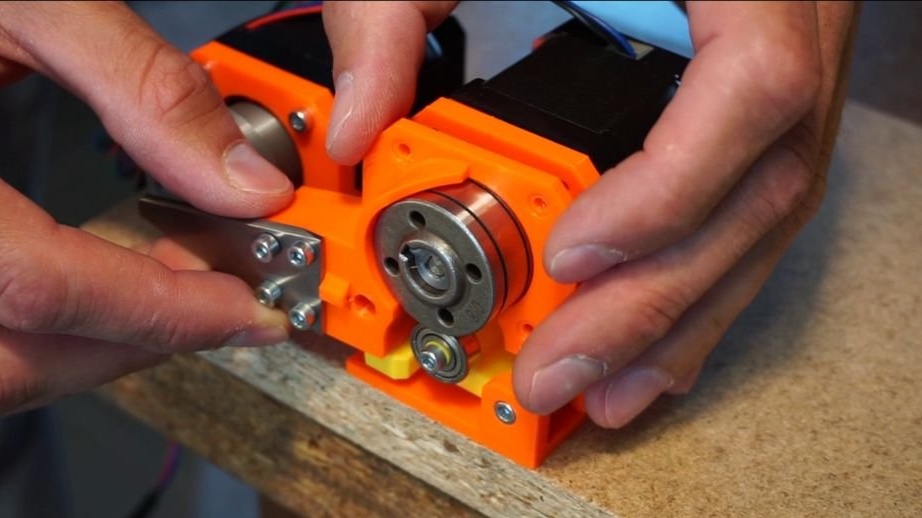
O alimentador e o dispositivo de flexão são conectados por uma placa de flexão - uma placa de metal com 2 mm de espessura e uma pequena ranhura na parede traseira, que alimenta o fio diretamente no centro da cabeça de flexão para uma flexão perfeita. Para a impressão, existe uma placa dobrável de plástico que funciona muito bem, mas se desgasta rapidamente e requer substituição frequente. Você pode usá-lo ou fazer uma placa de metal nele.
Em seguida, pegue a parte plástica da guia de arame e instale as quatro porcas M3 nos orifícios na parte traseira. Agora aparafuse a placa dobrável com os parafusos M3x20. Coloque a guia de arame na frente da estrutura do motor do mecanismo de alimentação e prenda-a ao motor com quatro parafusos M3x12. Ajuste a posição da placa de flexão. Deve estar exatamente no centro da cabeça de flexão.
O broche está pronto. Se você tem um fio reto, pode usá-lo agora. Caso contrário, você precisa de um retificador.





Quinto passo: espeto
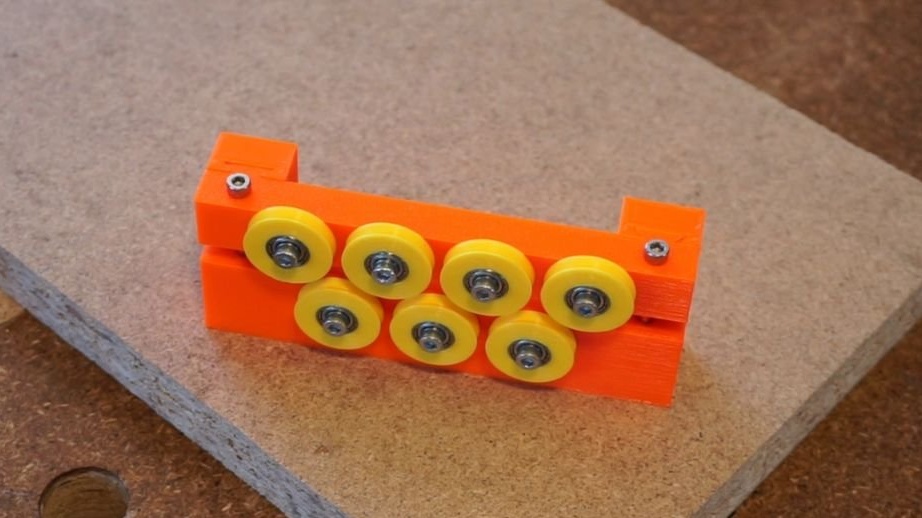
O fio é geralmente fornecido na forma de bobina. Para dobrar o fio, primeiro você precisa endireitá-lo. O retificador consiste em 7 rolos (4 na parte superior e 3 na parte inferior), que podem ser pressionados um contra o outro para garantir a tensão correta do fio. Também evita torcer o fio durante a dobra.
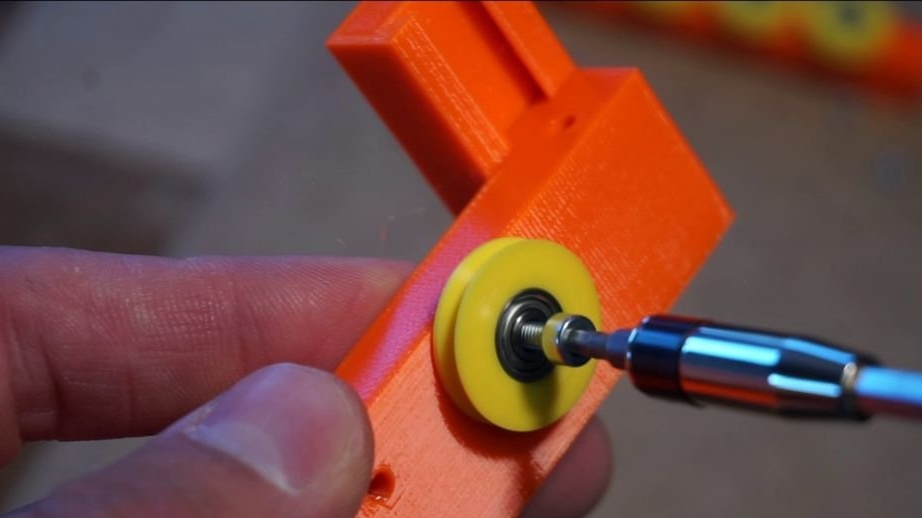
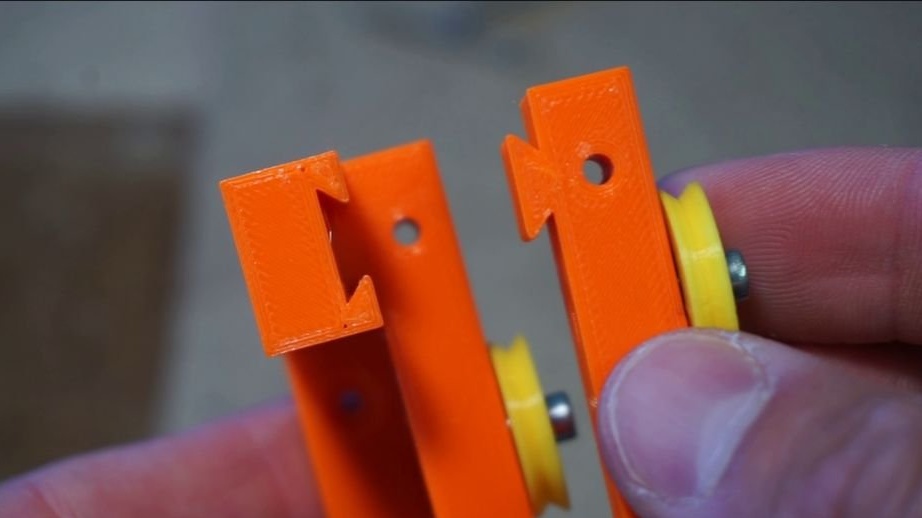
Inicie a montagem com os rodízios. Primeiro você precisa pressionar o rolamento 3x10x4 mm na carcaça do rolo de plástico. Insira o parafuso M3x12 em um lado e a arruela M3 no outro lado do rolo. A arruela evitará o atrito da roda na estrutura. Aparafuse todos os rolos nos quadros inferior e superior. Conecte os dois quadros. Prenda os quadros com dois parafusos M3x40.
Você pode economizar algum dinheiro com rolamentos de rolos. Imprima a parte Straightener_RollerNoBearing em vez de Straightener_Roller. Mas o desempenho será um pouco pior.
Para resultados ainda melhores, use 2 alisadores seguidos.




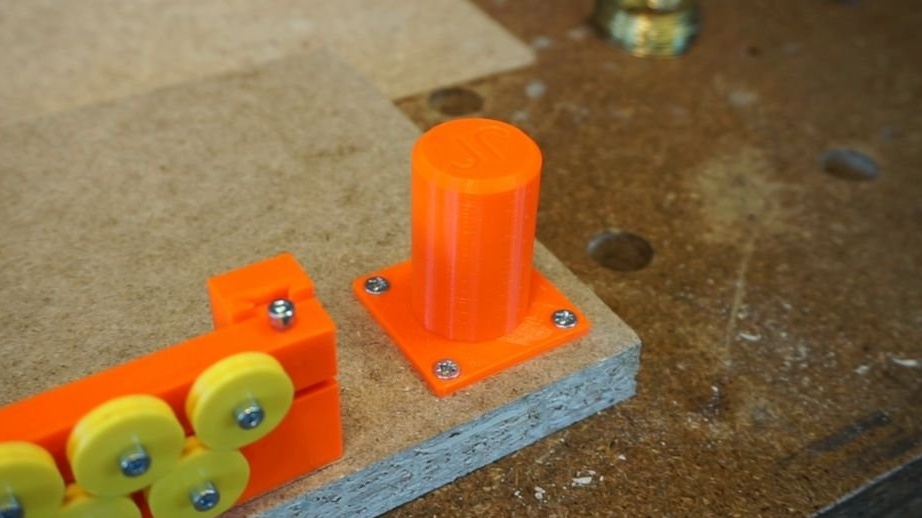
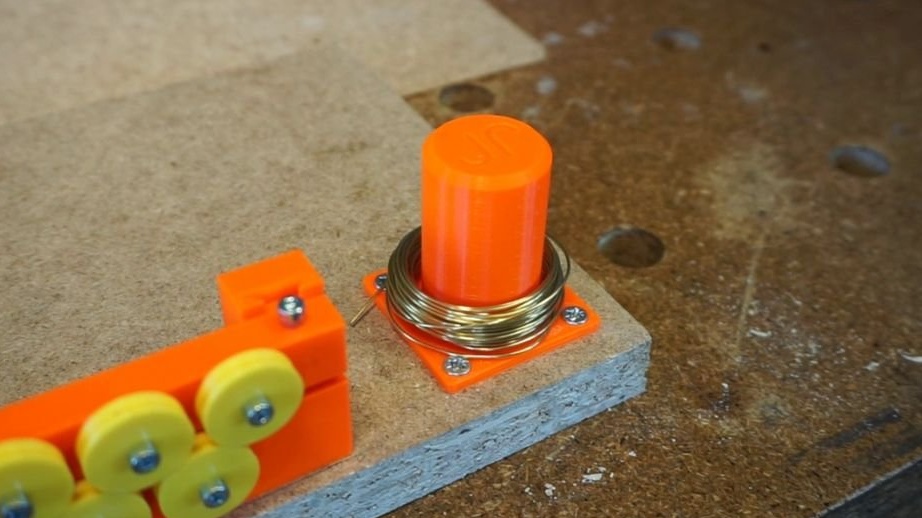
Etapa 6: Suporte da bobina
O porta-bobina é um cilindro simples que segura o fio e permite que ele se desenrole da bobina. Aparafuse-o à base com quatro parafusos 3x16.
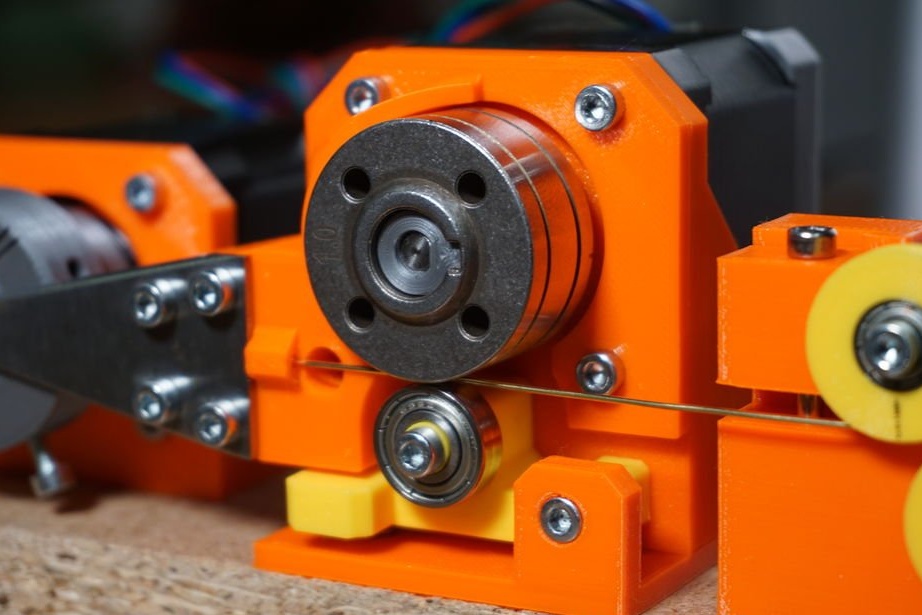
Etapa sete: conectar
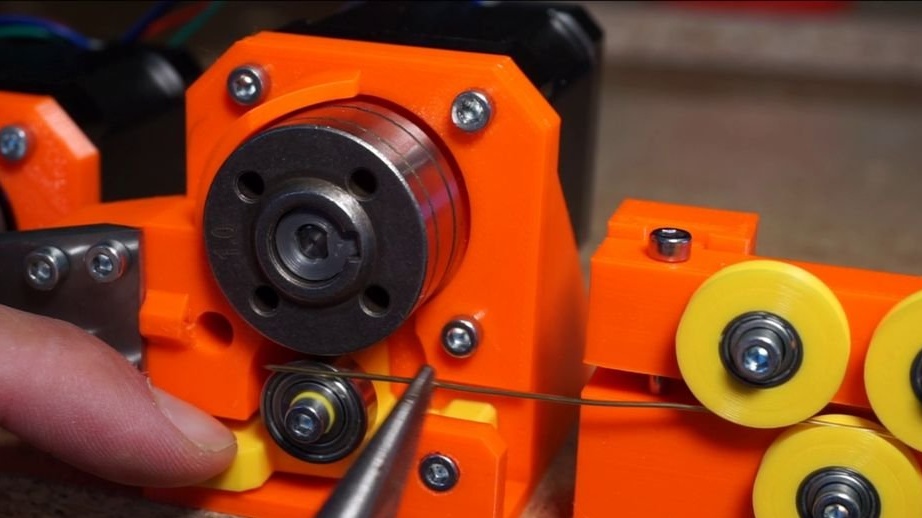
Primeiro, o fio de flexão deve ser alimentado à máquina. O mestre usa fio de latão de 0,8-1 mm na forma de uma bobina.
O fio passa da bobina através dos rolos. Basta enfiar o fio entre os rolos. Então ela passa pelo espeto.Ajuste a posição do mecanismo de alimentação para que a calha fique nivelada com a superfície da guia de arame. Pressione a alavanca na engrenagem intermediária e empurre o fio através do alimentador até a placa de flexão. Solte a alavanca e deixe-a pressionar contra o mecanismo de alimentação. Agora você pode rolar o mecanismo de alimentação manualmente para empurrar o fio até a cabeça de flexão. Ajuste cuidadosamente a tensão nos rolos, apertando os parafusos. Os rolos não devem girar livremente, mas o fio deve se mover suavemente.
Em segundo lugar eletrônica O controlador também deve estar conectado. O mestre usa o clássico Arduino UNO com CNC e dois drivers de motor de passo A4988. O motor de alimentação está conectado ao eixo Z e o motor da cabeça flexora está conectado ao eixo X. Os drivers são configurados para a maior precisão possível - todos os 3 jumpers sob os drivers de passo são inseridos. Tudo deve estar conectado a uma fonte de alimentação de 12V 3A.
Etapa Oito: Firmware
Agora você pode tentar iniciar a máquina. Mestre usa GRBL junto com cncjs. Eles são projetados para trabalhar em uma fresadora, mas funcionam muito bem para qualquer tipo de CNC. O GRBL é o firmware que você precisa instalar no Arduino UNO. Existe um bom cliente da Web cncjs para definir parâmetros. Instale o GRBL no Arduino e o cncjs no seu computador.
Após a instalação, é necessário conectar-se à máquina e verificar seu funcionamento pressionando os botões Z +/- ou X +/-.
Agora você precisa calibrar: 10 mm = Z10 $ 102 = 34 $ 110 = 1600 $ 111 = 600 $ 112 = 1000 $ 120 = 500 $ 121 = 350 $ 122 = 350
Este é um conjunto de valores que determinam como converter o número indicado no código em movimento do motor. Por exemplo, se você definir o eixo Z como 30, na verdade, ele empurrará 30 mm de fio através do alimentador.
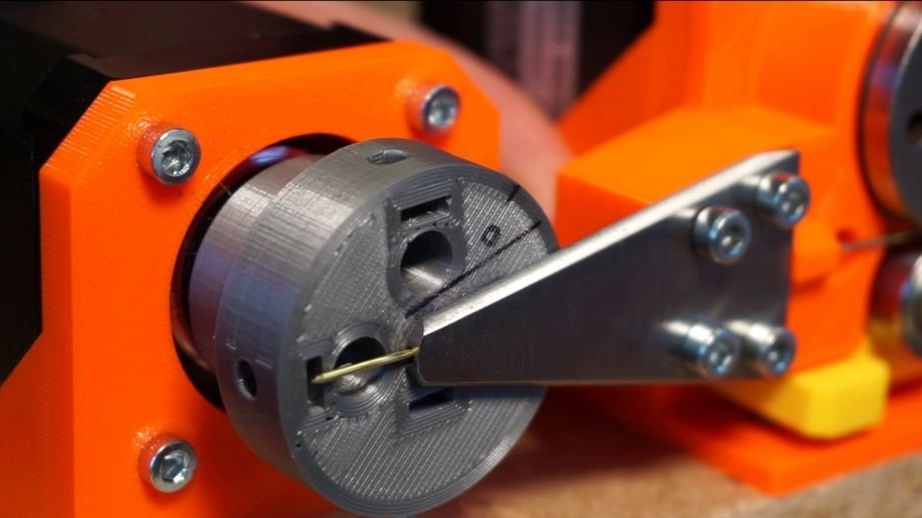
Nós descobrimos a calibração, agora você precisa definir a cabeça de flexão na posição zero.
O movimento da cabeça de flexão é determinado pela posição fixa bem conhecida da cabeça de flexão. Nesse caso, é a posição na qual o pino de flexão na cabeça está voltado para a esquerda. Veja a foto.
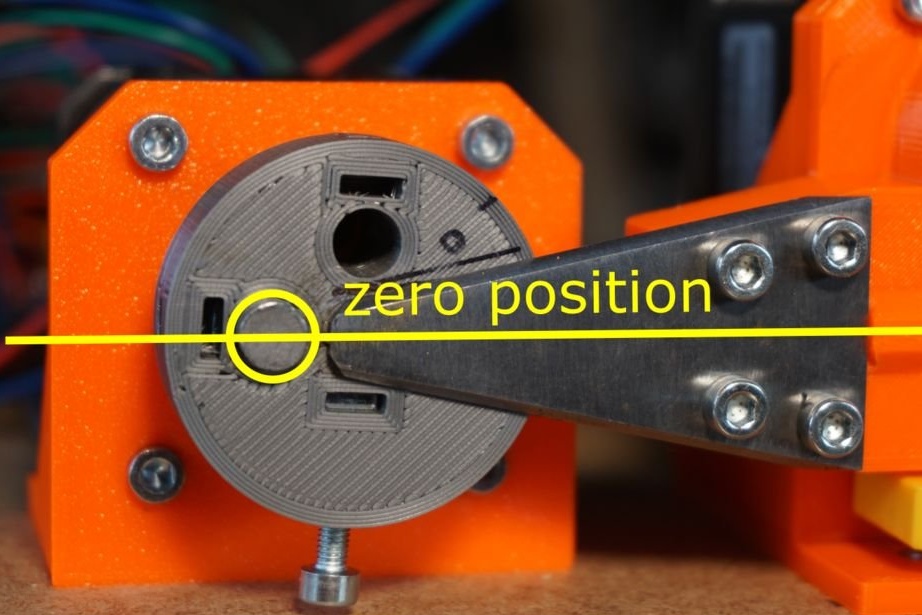
É aconselhável anotar esta posição zero na cabeça para poder retorná-la à mesma posição. Não é necessário que o mecanismo de alimentação determine a posição zero, porque ele sempre se move em relação à posição atual.
Agora vamos ver um exemplo do Gcode. É assim:
G91
G1 Z1
G90
G1 X2
G1 X-6E aqui está o significado de cada valor:
G91 - use coordenadas relativas (necessárias antes de qualquer movimento ao longo do eixo Z)
G1 Z1 - alimentação de 1 mm de fio
G90 - use coordenadas absolutas (necessárias antes de qualquer movimento ao longo do eixo X)
G1 X2 - gire a cabeça dobrável para a posição 2 (este número não possui unidades)
G1 X-6 - gire a cabeça dobrável para a posição -6
Se você repetir as etapas 100 vezes, receberá um código de dobra de mola. Mais arquivos de origem podem ser encontrados abaixo.
hex-inner.gcode
hex-outer.gcode
spring.gcode
A máquina está pronta. Mas o mestre ainda trabalhará para melhorá-lo.
Todo o processo de fabricação dessa máquina pode ser visto no vídeo.