

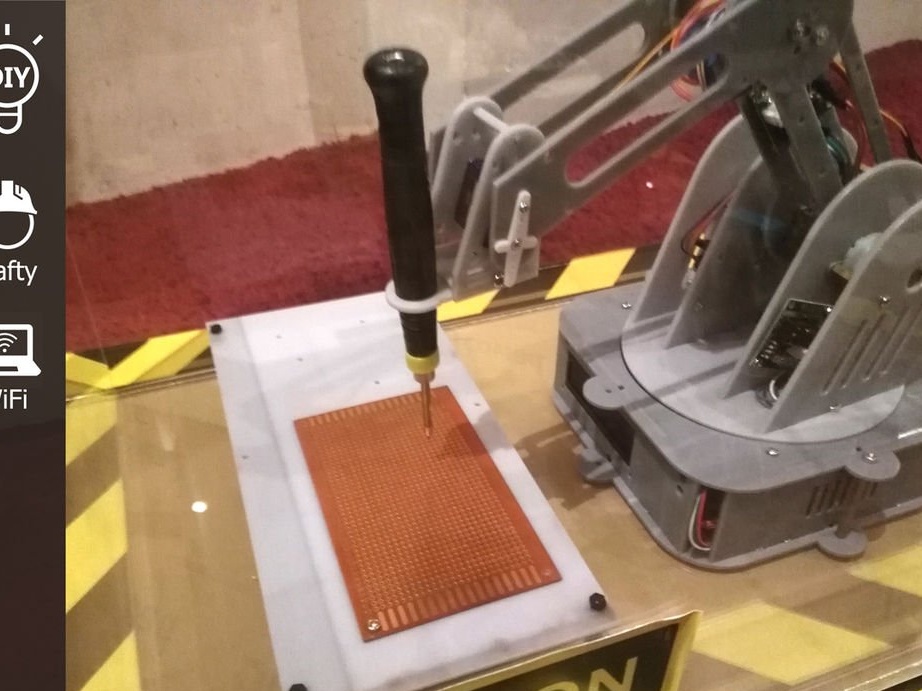

Infelizmente, este material não contém um artigo completo; portanto, decidi colocá-lo nas "dicas", talvez alguém possa precisar do material. O artigo descreve como soldar eletrônico componentes em uma placa de circuito impresso usando um braço manipulador automatizado.
A idéia do projeto veio à mente do mestre por acaso, quando ele estudou várias possibilidades de manipuladores robóticos e descobriu que existem várias que cobrem a área de soldagem e solda automatizadas por um manipulador robótico.
Ferramentas e materiais:
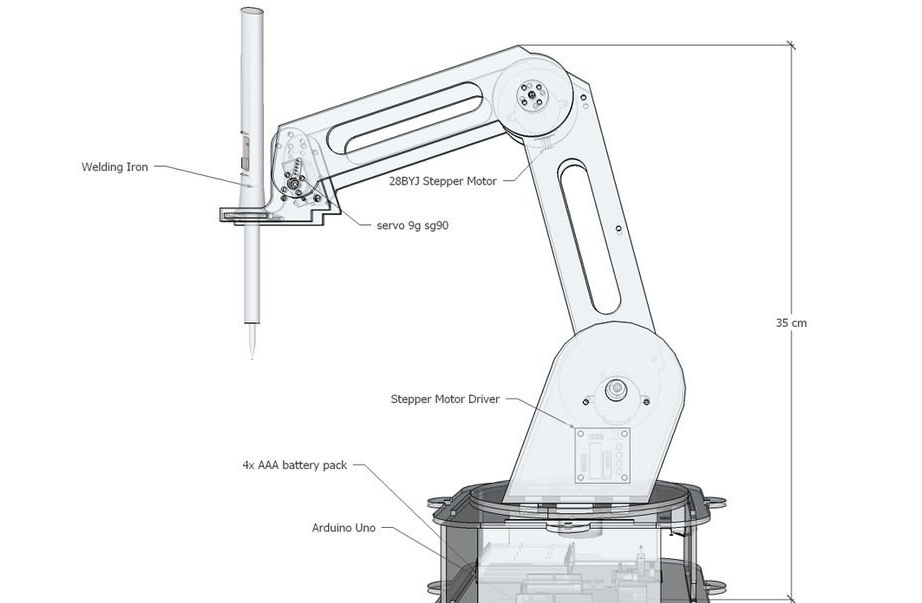
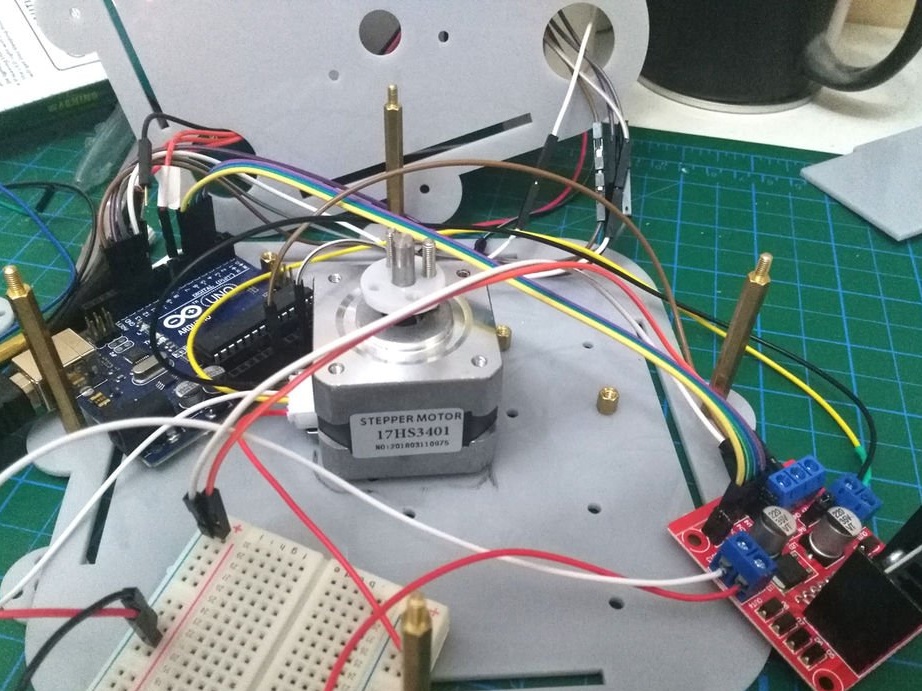
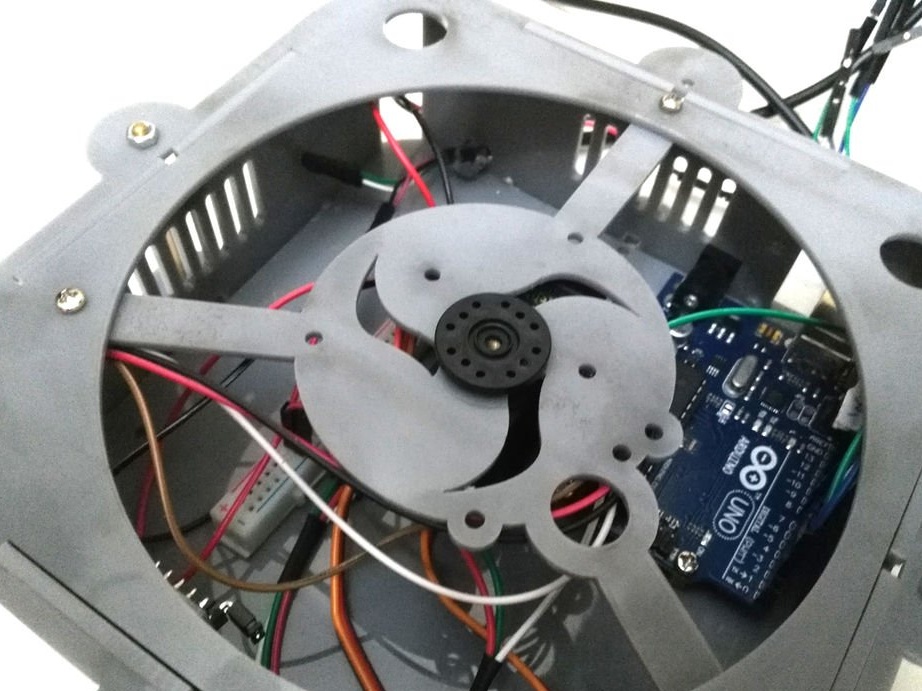
- Motor de passo 28BYJ-48 com módulo de acionamento ULN2003;
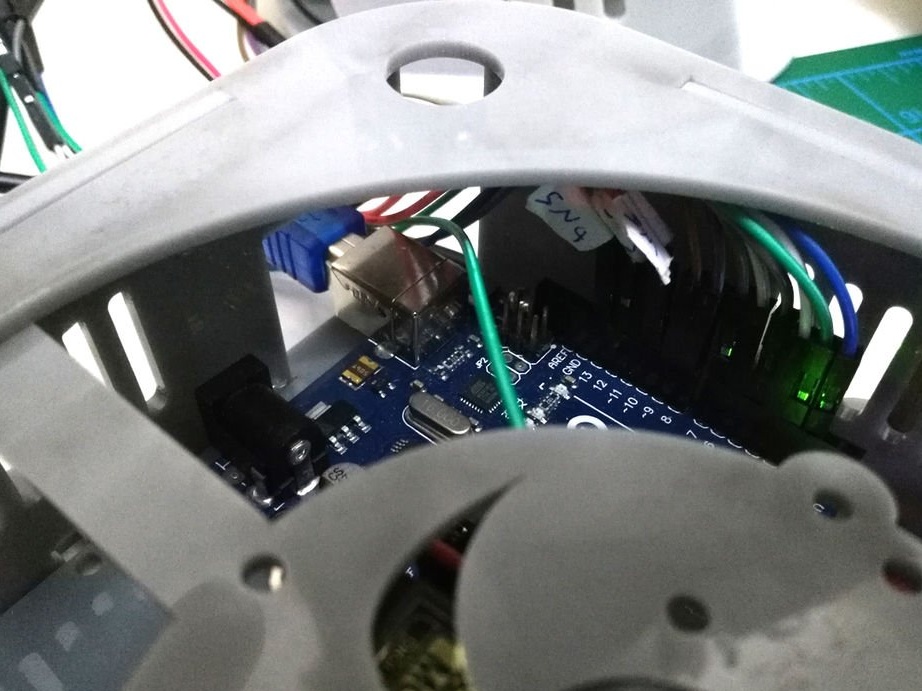
- Arduino Uno R3;
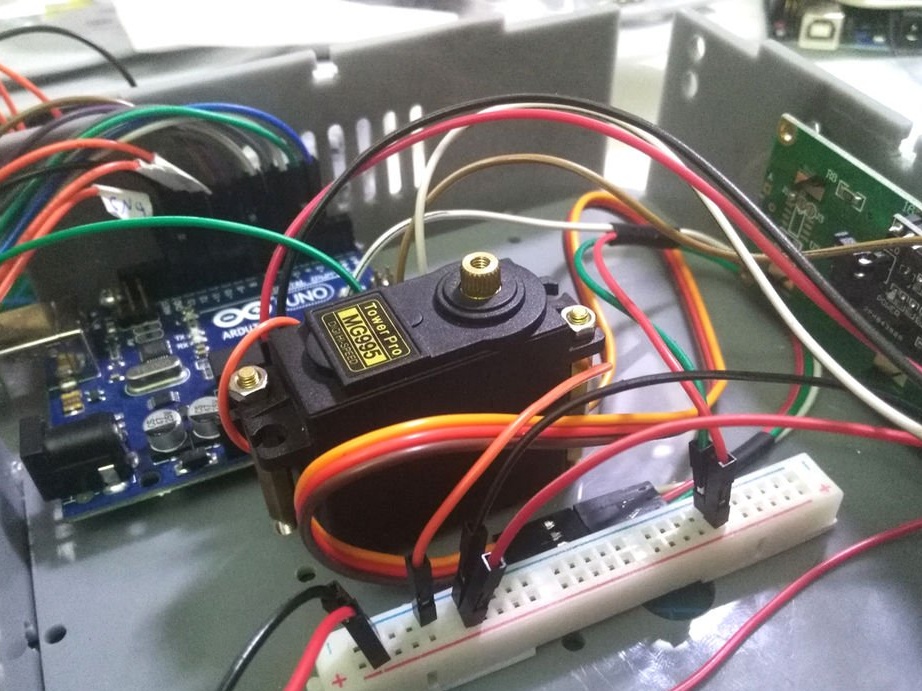
Servomotor MG-90S;
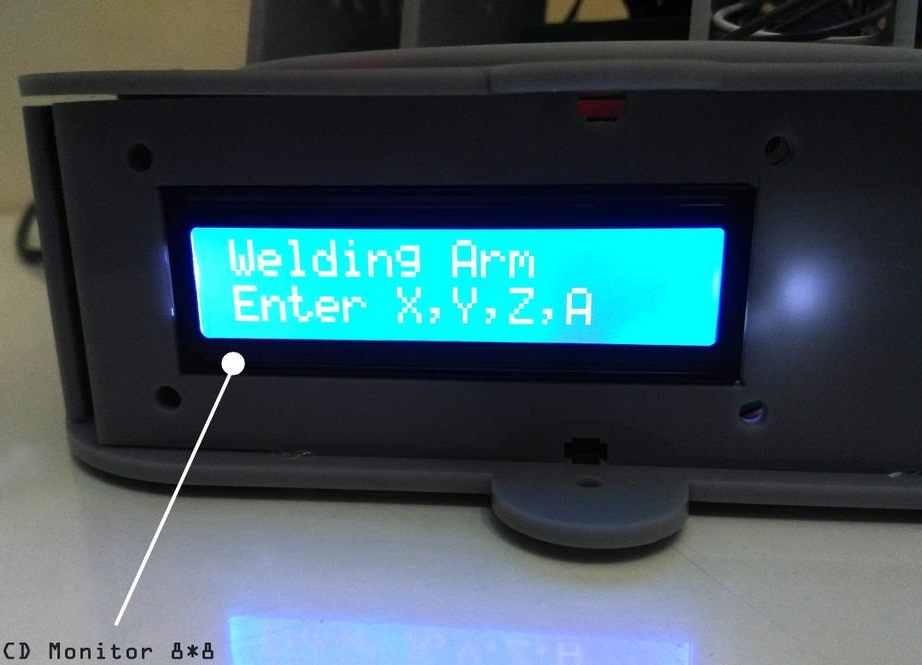
- LCD 1602;
-Board;
- fios de conexão;
- Conversor abaixador;
Servo-drive Servox SC-1252MG $
-Fixadores;










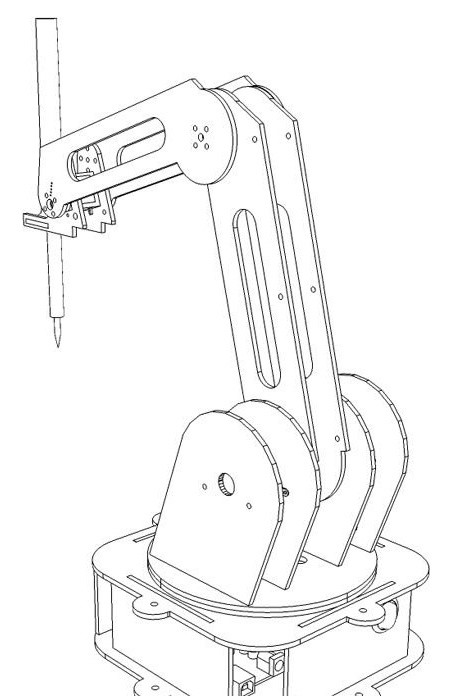
O assistente primeiro desenvolveu o projeto. Parte dos detalhes foi cortada em uma máquina CNC com laser.
Após a montagem de todas as peças, surgiram vários problemas:
1. As alavancas eram pesadas demais para serem controladas por pequenos motores de passo.
2. Desde o modelo era de plástico, o atrito da base rotativa era alto e os movimentos não eram suaves.
A primeira solução foi comprar um motor de passo maior, capaz de suportar peso e atrito, e o mestre refez a base para a instalação de um motor de passo maior.
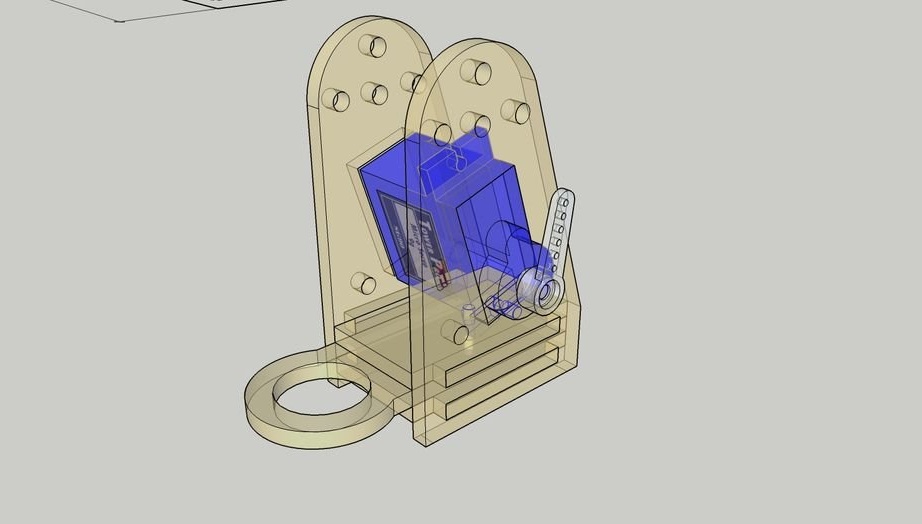
Mas o problema não desapareceu e, em seguida, o mestre mudou completamente o projeto básico e instalou um servomotor com uma caixa de engrenagens e engrenagens de metal.
3. A voltagem.
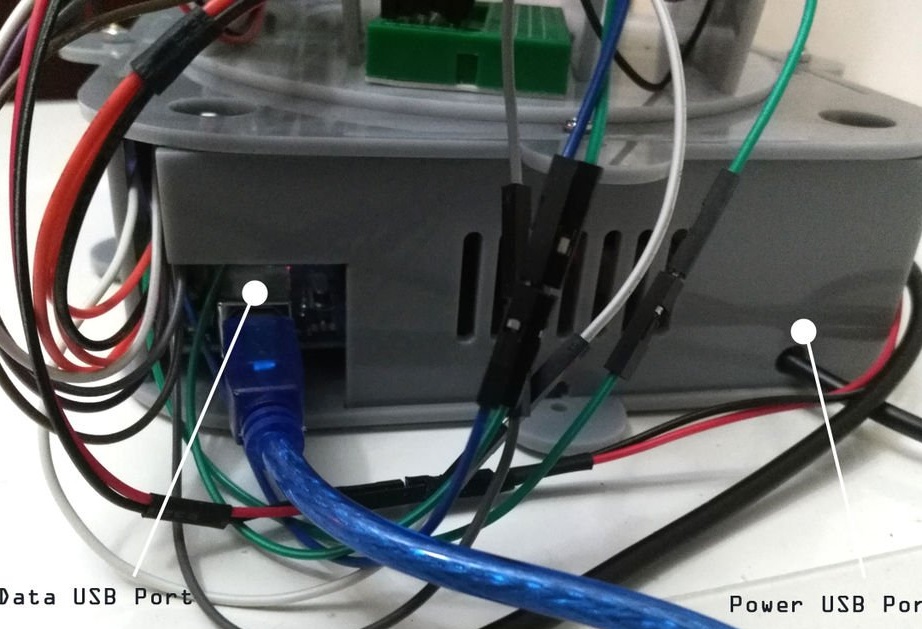
O Arduino pode ser alimentado pelo conector de energia DC (7-12 V), pelo conector USB (5 V) ou pelo pino VIN da placa (7-12 V). A alimentação de tensão através dos contatos de 5 V ou 3,3 V ignora o regulador, e o mestre decidiu comprar um cabo USB especial que suporta 5 V de um PC ou de qualquer fonte de energia.

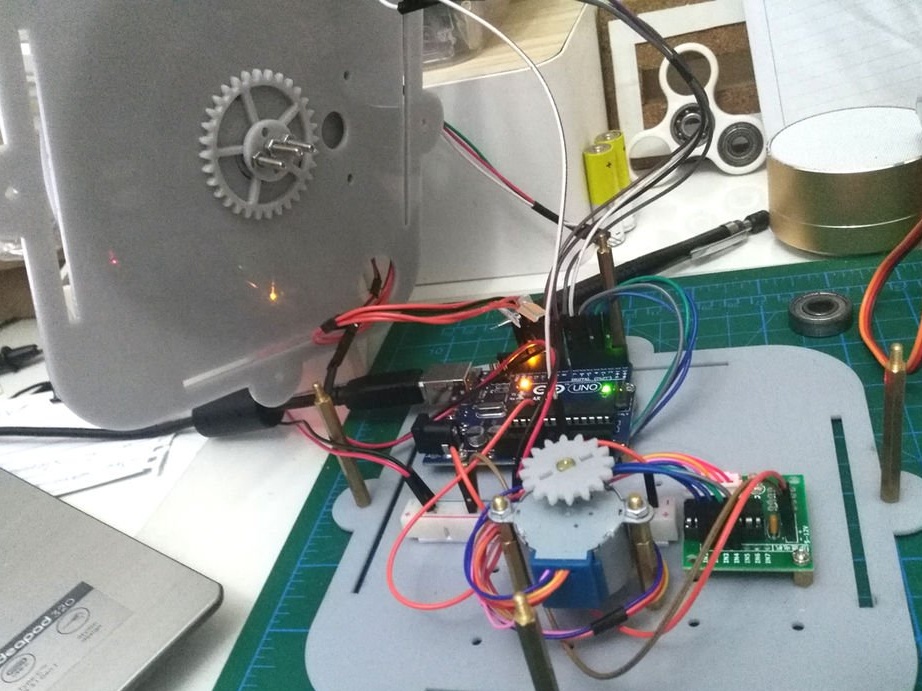
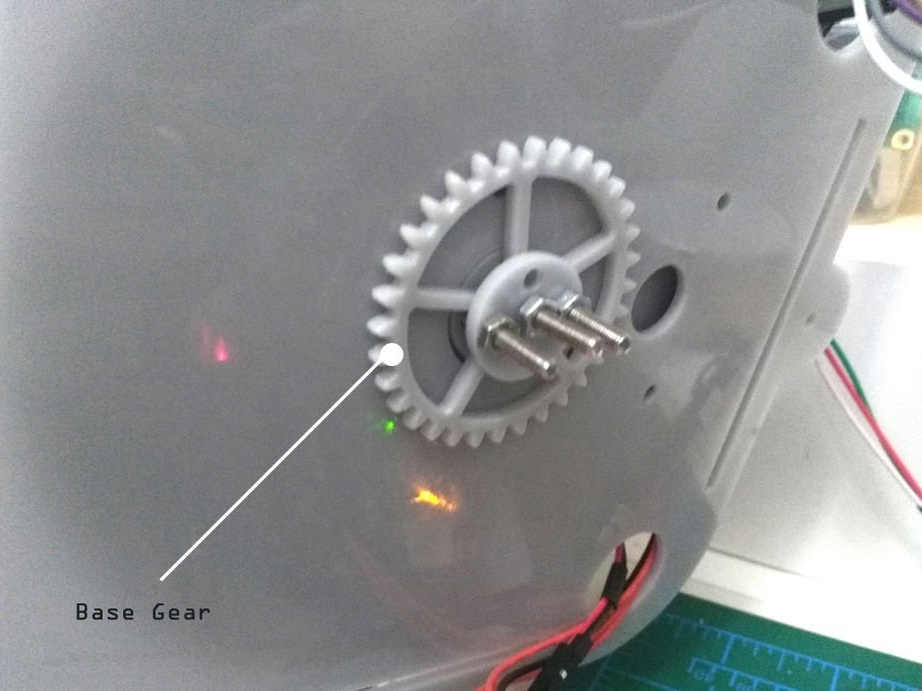

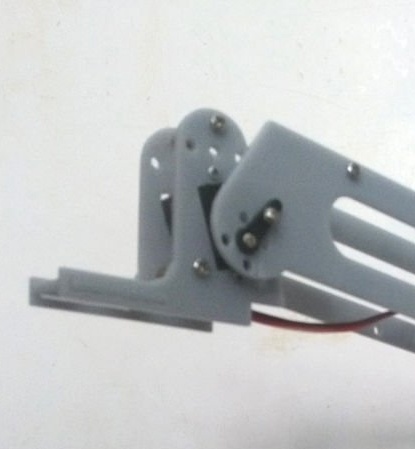
Após algumas modificações, o mestre mudou o design do modelo, reduzindo o tamanho dos suportes e fazendo um furo adequado para a caixa de engrenagens do servomotor, como mostrado na foto.

Para segurar o ferro de soldar, o mestre fez uma montagem especial.Para uma operação adequada, é necessário um servomotor com um parâmetro de rotação de 180 graus.

O código pode ser baixado abaixo.

ProjectCodeFirst.ino
Destaques da fabricação do dispositivo podem ser vistos no vídeo.
Claro, as informações não são suficientes, não há circuito, não há arquivos para o CNC, não há exemplos do dispositivo, mas há uma boa ideia e talvez um assistente interessado, com base nessa ideia, ele fará um dispositivo totalmente funcional.